针对阵列雷达极化测量的极化干扰效果对比分析*
2022-11-12张晓文郝志梅王强
张晓文,郝志梅,王强
(中国航空工业集团公司 雷华电子技术研究所,江苏 无锡 214063)
0 引言
雷达回波信号中除了幅度、相位和多普勒频移外,还存在着第四特征即极化特征:电磁波照射目标后,其极化状态将发生改变,改变程度与目标的形状、大小及姿态等因素有关。射频天线技术的发展使得雷达提取和利用极化信息成为可能[1]:雷达可自由灵活地调整发射电磁波的极化状态,或将接收信号的极化参数作为身份信息对回波信号进行分类和识别、自适应地放大和干扰。极化作为除时、频、空域信息以外可资利用的重要信息,在目标检测、增强、滤波及识别中有着巨大的应用潜力,特别是在识别干扰信号身份、抑制干扰信号功率等抗干扰方面将发挥重要作用[2-5]。
目前,有源雷达干扰通常选择斜极化或圆极化的发射信号,被迫接受因极化失配在接收时损耗的3 dB~6 dB 功率,极力保证足够强度的干扰可以进入接收机。但是当雷达采用极化对消、极化识别、极化滤波器等抗干扰措施后[3],固定极化干扰能量损失达15 dB 以上,即使有少量的干扰能量进入后仍会被这些抗干扰手段蔽除。干扰机迫切需要精心设计干扰信号的极化状态、保证干扰功率,并进一步满足和这些极化抗干扰手段对抗的战场需求。然而现有的极化干扰技术或通过提高干扰信号与雷达的极化匹配度来伪装身份、保证/增强干扰信号增益,或使用瞄准雷达极化捷变的大功率压制干扰技术,还没有形成类似空域欺骗、频域欺骗的精细化、多样化的全极化干扰生成技术[4-5],作战对象大多集中于没有极化敏感能力的单极化阵列[6-13],对极化处理技术丰富的全极化阵列还未形成系统完整、主动积极的干扰方案[14-20]。
国内极化干扰技术与美国等先进国家[2,13,18]相比仍存在一定差距,对极化的利用集中于干扰机对雷达信号的极化侦察和基于交叉极化干扰的单极化阵列角度欺骗技术,针对全极化阵列的主动干扰技术基础薄弱[14-20]。极化测量作为全极化阵列关键处理模块之一,其强弱直接影响了极化信息利用的效果,高精度的极化测量结果对信号识别、设置极化滤波器有重要意义。本文旨在提升极化干扰调制技术的成熟度,在干扰针对极化测量的结果影响做出理论分析和预测的基础上,提出一套稳健、适应性强、可操作性强的极化干扰生成方案。
1 全极化阵列信号模型
1.1 电磁波极化信息
电磁波作为TEM 波,其电场矢量部分可以完全描述电磁波的能量分布和变化情况。一般的,电场矢量由一对正交方向水平(Historical,H)极化方向和垂直(Vertical,V)极化方向表示(图1),记作矢量h =(cos γ,sin γejη)T,其中 γ ∈ [0,π 2],η ∈ [0,2π]。

图1 来波信号波达角和极化方向定义示意图Fig.1 Direction of arrival and polarization definition of received signal
1.2 全极化阵列信号模型
由N 个阵元组成的均匀全极化线阵放置在x 轴(图 2),H 极化天线响应为 pH= fHcos γ;V 极化天线为 pV= fVsin γejη。天线间距为 Δd,1 号天线的坐标设为(d,0)。假设有信号从θ 入射阵列,极化参数是(γ,η)。H 阵列接收数据的空域匹配波束形成输出为

图2 水平和垂直极化天线为阵元的全极化阵列Fig.2 Full-polarization array equipped with H-and V-antennas
式中:A 为信号幅度;α0为波束主瓣指向;κ 为波数;s(t)为信号包络。同理对V 阵列有VV= pVX(t)。
2 极化调制干扰对雷达极化测量的影响
2.1 雷达极化测量原理与流程
雷达极化测量包括基于发射正交波形设计的分时/同时极化测量体制[20],基于接收天线极化响应差异的测量方法。前者用于测量散射体的极化散射特性,对散射体的变极化效应做预测。后者用于测量反射信号的极化状态,对来波信号进行分类、识别和滤波。本节仅讨论干扰后者的干扰生成方法,如图3 所示。
2.2 极化调制干扰对目标极化测量的影响

式中:Ctar,Cint分别为目标和干扰的极化相干矩阵;ΔC 为目标和干扰的交叉项。由式(3)可知,干扰信号功率、角度、极化共同影响极化测量的结果,干扰信号势必会给目标极化参数的测量带来误差。
2.2.1 θint= θtar
当干扰信号入射方向和目标入射方向一致时,有 θtar= θint⇒ Ptar= Pint。 此 时 ,H 阵 列 和 V 阵 列 对接收数据的幅相响应为

由于干扰信号功率远大于目标,umax靠近干扰极化导向矢量,同时噪声和交叉项ΔC 的存在使其偏离hint。
2.2.2 θint= θtar、干扰为交叉极化调制
将目标的交叉极化矢量记作h⊥tar,此时干扰极化状态为hint= h⊥tar。当干扰为转发式或DRFM 产生,其信号包络与目标回波包络相关,即有s(t) =化相干矩阵为

以上理论推导还证明,固定极化调制的干扰不适宜应用于全极化阵列,会很容易被全极化阵列捕获极化参数,进而被极化滤波器的凹口对准,难以保证干扰作战能力。
2.2.3 θint= θtar、干扰为交变极化调制
此时干扰极化参数在γint=(γtar,π 2- γtar),ηint=(ηtar,ηtar± π)之间跳变,其中 ηint∈ [0,2π]。假设干扰的极化状态交变1 次,前后段包络分别为ξs(t1)、ξs(t2
),ξ 仍为相关系数。省略部分推导过程,极化相干矩阵为
2.2.4 θint= θtar、干扰为随机极化调制
为简要说明此种情况测量结果,假设干扰随机变化两次,即 γint=(γ1,γ2),ηint=(η1,η2)。省略部分推导过程,有

2.2.5 存在多个干扰
当存在多个干扰时,功率远高于其他干扰的将在极化测量中起主导作用。但由于除共轭关系外的Jones 矢量不相干,能量最高的若干干扰会共同影响测量结果。
2.3 极化调制干扰对干扰极化测量的影响
雷达在静默期不发射电磁波,此时接收到的信号全为干扰和噪声信号,可将其作为参考数据对干扰参数、调制方式、极化状态进行分析,为工作期的抗干扰处理提供支持或参考。
2.3.1 极化状态时变的单一干扰
设干扰1 从θ1入射,时变调制的极化状态是(h1,h2,…)。空域波束形成后 H 和 V 阵列的输出时间 序 列 分 别 为 VH=[VH,1VH,2… ] 和 VV=

式中:C1,C2,… 分别为干扰在时间段 1、时间段 2…的极化相干矩阵,式(9)中不存在时间上的交叉项。
对 各 时 间 的 C1,C2,… 做 特 征 值 分 解 ,umax和(h1,h2,…)对应。但虽然总时间的 C 和 C1,C2为线性关系,由特征向量的计算方法特别是式(3)中的计算方法得知,C 的特征向量和 (h1,h2,…)并不具有线性关系,更不等于h1,h2中任意一项,而是(h1,h2,…)的复杂函数。
2.3.2 不同来波方向、不同极化状态的多个干扰
设有2 个干扰信号入射阵列,干扰1 的参数为( θ1,h1:γ1,η1),干扰 2 的参数为(θ2,h2:γ2,η2)。空域波 束 形 成 后 H 阵 列 的 输 出 为 VH= VH,1+ VH,2,同 理有 V 阵列的输出 VV= VV,1+ VV,2。极化相干矩阵为

式中:C1,C2分别为干扰 1 和干扰 2 的极化相干矩阵;ΔC 为两干扰的交叉项。与上面讨论相同,式(10)中 C1,C2和 ΔC 各自的 umax对应 h1,h2和 Δh,C的 umax与 h1,h2和 Δh 有关,但不和 h1,h2和 Δh 线性相关,更不等于 h1,h2和 Δh 中任意一项。
虽然以上2 条推导证明,干扰的极化状态时变或者极化状态不同的多个干扰并存时,极化测量值不等于任何一个实际参数,但功率最大的干扰势必会占据主导地位,吸引测量值向其倾斜。
3 仿真实验
以上理论推导证明,雷达极化测量结果与信号能量息息相关,目标、干扰、噪声等任一电磁波的功率和极化分布情况都会对最终测量结果施加影响。基于第2 节的理论推导,本节使用仿真实验探究不同极化调制、不同干噪比的干扰对雷达极化测量的影响,极化调制方法包括交叉极化调制、交变极化调制、随机极化调制。
仿真实验目标和干扰的具体参数如表1 所示,目标与干扰信号包络相关,环境存在零均值高斯白噪声。
表1 仿真试验参数Table 1 Parameters in simulation
3.1 交叉极化调制干扰对极化测量的影响
本实验的干扰与目标信号极化状态正交。图4极化测量结果向干扰极化参数倾斜,但目标信号和噪声的存在使测量结果并不完全等于干扰极化参数。欺骗式干扰和压制式干扰效果略有差别,现象大体一致。
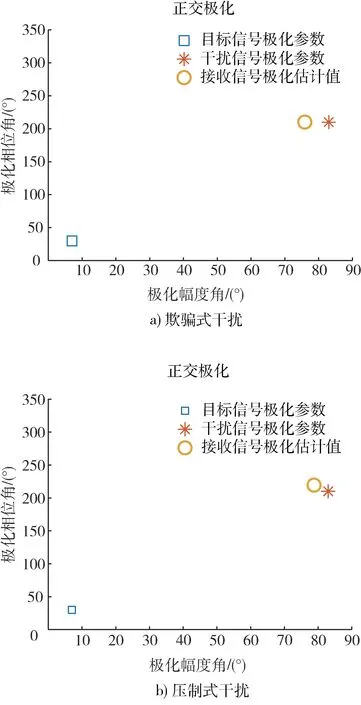
图4 交叉极化调制干扰信号对测量结果的影响Fig.4 Results of measurement affected by crosspolarization interference
3.2 交变极化调制干扰对极化测量的影响
本实验中的干扰极化状态在原极化和交叉极化之间交变,交变次数分别为 1,5,10 次,2 种极化状态保持时间均等。图5,6 中无论干扰信号交变几次,接收数据中的极化状态只由原极化和交叉极化2 部分组成,交叉极化状态只有部分时间的干扰信号,原极化状态对应目标信号和干扰信号,更高的信号功率使测量结果在原极化状态附近。不论是欺骗式干扰还是压制式干扰都有相同的结果。
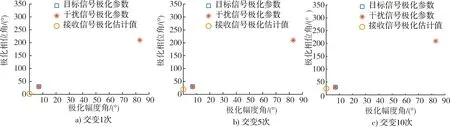
图5 欺骗式干扰:交变极化调制干扰信号对雷达极化测量的影响Fig.5 Deceive interference:results of measurement affected by changing-polarization interference
3.3 随机极化调制干扰对极化测量的影响
本实验中的干扰极化状态在以交叉极化为中心的邻域内随机变化,随机变化程度由方差和变化次数表示。图7、8 结果显示,测量结果分布在所有干扰随机极化状态的均值附近,由于方差大小比变化次数更能影响所有随机极化状态的数值均值,因此对测量结果的影响更大。在实际极化调制时,干扰机没有必要过多地改变干扰捷变次数,更需要精细地决定讨论统计均值的位置和方差大小。

图7 欺骗式干扰:随机极化调制干扰信号对雷达极化测量的影响Fig.7 Deceive interference:results of measurement affected by random-polarization interference

图6 压制式干扰:交变极化调制干扰信号对雷达极化测量的影响Fig.6 Suppress interference:results of measurement affected by changing-polarization interference
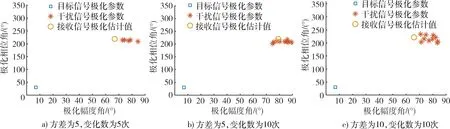
图8 压制式干扰:随机极化调制干扰信号对雷达极化测量的影响Fig.8 Suppress interference:results of measurement affected by random-polarization interference
4 结论
本文先对不同干扰模式、不同极化调制方式的干扰信号对雷达极化测量的具体影响进行理论推导和仿真分析,在此基础上提出一套稳健、适应性强、可操作性强的极化干扰生成方案,总结如下:
(1)由于雷达先进行极化测量,再将测量结果用于建立极化滤波器,因此无需考虑干扰信号和雷达极化模式的匹配程度以及基于极化滤波器的抗干扰措施,可根据战场需要自由灵活的调整干扰信号极化方式。
(2)由于不知悉雷达的工作状态,干扰机应在兼顾各雷达处理模块的前提下,持续发射信号阻碍雷达单脉冲测角、极化测量、极化滤波器等正常工作。为了利用基于交叉极化的角度欺骗技术基础,又要具有捷变、随机的调制特点避免雷达捕获参数,进而被极化滤波器的凹口对准,干扰信号应采取随机极化调制方法,在交叉极化附近大方差地选点,但没有必要过分地增加干扰捷变次数。