无人潜航器作战运用模式及关键技术*
2022-11-12孙盛智苗壮李杨罗云郑卫娟盛碧琦
孙盛智,苗壮,李杨,罗云,郑卫娟,盛碧琦
(1. 武警海警学院,浙江 宁波 315801;2. 军事科学信息研究中心,北京 100142;3. 中国海警局,北京 100195)
0 引言
随着全球地缘政治格局的演变,各军事强国的利益触角开始由传统的陆地、海洋和天空向深海、太空等领域延伸,随着太空和深海争夺的日趋激烈,在一定程度上也为各军事强国扩展了新型作战领域[1]。海洋作为人类资源的主要聚集地,争夺海洋和控制海洋已经成为未来海上斗争的主要目的,而随着大型水面舰艇的快速发展,攻击力、机动力等主要性能都有了大幅提升,已经为各军事强国海上激烈对抗提供坚实的物质基础,严重挤压了各国海洋利益的拓展空间。深海作为海洋利益争夺的最后空白,各军事强国开始强力布势,海洋利益的争夺也逐步由海面向水下延伸,而作为争夺深海的利器,水下无人潜航器应运而生,并开始逐步运用于军事领域[2]。无人潜航器作为代替潜水员或载人小型潜艇进行深海探测、水下救援、近距攻击等行动的主要平台,已经得到美俄等军事强国的重点关注,成为颠覆未来水下作战模式的关键利器。2017年,美国国防科学委员会发布《下一步无人水下系统》,探索如何用水下作战能力弥补其他领域作战能力的不足,以及如何开发下一代无人水下作战系统,明确未来无人水下系统的发展方向[3]。美国海军在研超大型无人潜航器(LDUUV),具有自主执行扫雷、跟踪、情报侦察和智能化攻击的能力,既可以单独使用,也可以在核潜艇和水面舰艇上部署,LDUUV 作为未来水下作战体系的核心节点,计划2016 年进行巡航试验,2017 年装备美军部队,2020年形成完全水下作战能力[4]。
1 无人潜航器作战运用需求
随着深度学习、数据挖掘等人工智能技术的进步,水下无人潜航器开始在现代海战中崭露头脚,它的出现重组了海战场的作战力量体系,颠覆了现代海战的制胜机理[5]。水下无人潜航器作为一种新型作战装备,能够替代有生力量进行隐蔽跟踪、突然袭击和迷惑敌方,其水下作战的高效运用不但有效降低了战场的伤亡率,还极大提升了海上作战效能。
1.1 实现隐蔽跟踪的需要
侦察监视是实现对敌方重要目标跟踪的前提,也是实施水下作战的基本保障。无人潜航器的下潜深度较大,具有良好的隐蔽性能,很难被敌方的各类传感器探测感知,在一定程度上能够满足“先敌发现”的预期目的。随着敌我双方战场侦察监视体系的完善,跟踪与反跟踪成为支撑水下现代化战争的重要环节,敌方通常会利用各类传感器从不同作战域探测己方力量的战场部署,而利用小型化、高深潜的无人潜航器进行隐蔽抵近跟踪,是抵消敌方侦察优势,先敌发现目标的重要保障。从感知战场态势的角度出发,利用无人潜航器搭载的声呐、磁异探测仪等多种传感器,在保证己方生存的同时,从水下隐蔽跟踪敌方动态目标,抵近识别与查证,剔除侦察情报的模糊信息,有效弥补战场情报漏洞。
1.2 发动突然袭击的需要
随着现代防御体系的完善,海上作战体系开始由点防御向区域防御转变,而要完成对海上重要目标的致命性摧毁,这对进攻性武器的作战效能提出很大挑战。发展隐蔽性能强、攻击威力大的水下大型无人潜航器,是对敌方重要目标发动突然袭击,打击敌作战体系核心节点,实现海上非对称作战的重要保障。由于无轴泵推、消音瓦等静音技术的突飞猛进,无人潜航器已经成为真正的“大洋黑洞”,水下跟踪监视的难度愈来愈大,这就为突破敌方侦察监视体系,抵近敌方动态目标实施近距离攻击奠定重要基础。无人潜航器作为低价值、高性能的无人作战系统,能够自由出入危险区域,按照海上作战需求,对多样化攻击性武器进行模块化组合,从不同深度、不同角度对敌方重要目标发起突然袭击。
1.3 迷惑敌方攻击的需要
水下作战力量作为海上作战体系的重要组成部分,已经成为敌方重点攻击的目标,敌方可利用深水炸弹、鱼雷等水下攻击性武器,对水下作战平台实施毁灭性攻击。大型攻击性潜艇作为高价值武器装备,自身防御性能较差,由于其水下潜航速度较慢,很容易被敌方发现、跟踪和锁定,遭受致命性攻击,付出极大的战争代价,严重影响海上作战体系的完整性和火力打击的持续性。作为部署在大型潜艇上的无人潜航器,能够在适当时机从适当位置发射出去,运用噪声模拟装置,模拟出近似水下母艇的噪音,干扰敌方传感器水下目标的探测,迷惑敌方攻击目标定位,以自杀式防御方式,吸引敌方的攻击火力,在保障水下潜艇安全的基础上,不断消耗敌方攻击弹药,迟滞其海上高强度作战。
2 无人潜航器作战运用模式
无人潜航器作为重要的水下作战平台,开始在日趋激烈的海上斗争中崭露头脚,其将海上作战空间由海面拓展到深海,推进多元多域海上作战模式的演化。无人潜航器作为一款水下作战的利器,在人工智能技术的支持下,改变了无人潜航器被动参与的作战运用模式,促使其朝着自主智能式的方向不断演化,颠覆传统的海上作战制胜机理。
2.1 被动集中式作战运用模式
被动集中式作战运用模式是无人潜航器水下作战运用的初级阶段,该模式主要用于无人潜航器作战运用的概念验证,并未实际运用到水下作战行动中。受信息技术发展的限制,水下作战概念验证阶段的无人潜航器信息化水平较低,主要通过手工遥控的方式,使其单向、被动地参与水下作战行动。无人潜航器作为隐蔽攻击的水下利器,一般搭载在大型潜艇上,由水下母艇全程控制无人潜航器,规划其水下作战任务,完成攻击火力配系,保证无人潜航器能够顺利完成侦察监视、决策筹划、火力打击和效能评估等,实现水下作战全要素全流程的闭合环路。被动集中式作战运用模式基本上是用水下母艇全程控制无人潜航器的所有战术行为,无人潜航器不存在独立的作战筹划过程,只能通过水下通信系统接受水下母艇的作战指令,并按照作战指令具体实施水下作战任务。通常情况下,被动集中式作战运用过程中,一艘水下母艇能够集中控制多艘无人潜航器,而无人潜航器之间并不存在控制与被控制的关系,全程接受水下母艇的指挥控制,受指挥控制链条长宽比例的限制和水下通信系统性能的制约,无人潜航器数量并不能无限制增加,一般4~5 艘为宜。被动集中式作战运用模式如图1所示。

图1 被动集中式作战运用模式Fig.1 Passive centralized combat application mode
被动集中式作战运用模式是无人潜航器作战运用的初级阶段,受信息传输速率和容量的限制,水下通信系统难以保证语音、视频等信息的高质量传输。同时,无人潜航器与水下母艇之间只能实现单向信息传输,这都严重降低了信息传输的时效性,影响无人潜航器作战效能的发挥。水下攻击目标一般包括固定目标、低速目标和时敏目标,而被动集中式作战运用模式,受作战时效性影响,无人潜航器通常只能实现对固定目标的水下攻击,但是在现实水下作战实际中,固定目标是很少存在的,因此,被动集中式作战运用模式仅仅是从理论上验证无人潜航器的水下作战运用,尚未应用到实际的水下激烈对抗中,只是用于无人潜航器作战运用概念的验证,为无人潜航器的发展奠定重要理论基础。
2.2 半主动分布式作战运用模式
半主动分布式作战运用模式是无人潜航器水下作战运用的中级阶段,该模式已经在现行水下作战行动中得到验证。随着传输速率、传输容量等信息技术的进步,水下通信系统由小容量、低速率向大容量、高速率的方向转变,提高了信息传输的时效性,提升了无人潜航器水下作战效能的发挥。无人潜航器信息化水平的提高,使无人潜航器之间以及无人潜航器与水下母艇之间的信息传输能够实现双向交互。半主动分布式作战运用模式将水下母艇控制无人潜航器个体变为控制无人潜航器编队的模式,水下母艇全程控制无人潜航器编队的主要作战进程,但并不控制单一无人潜航器的具体战术行为。从优化水下攻击角度出发,无人潜航器编队在水下局部作战中,可以脱离水下母艇指挥,自主完成水下攻击闭合环路,这就是与被动集中式作战运用模式的主要区别。通常情况下,半主动分布式作战运用过程中,一艘水下母艇能够全程控制多个无人潜航器编队,而每个编队能够控制多艘无人潜航器,但是编队数量和个体数量并不能无限制增加。从作战能力发挥的角度出发,水下母艇控制2~3 个编队,每个编队2~3 艘为宜。半主动分布式作战运用模式如图2 所示。
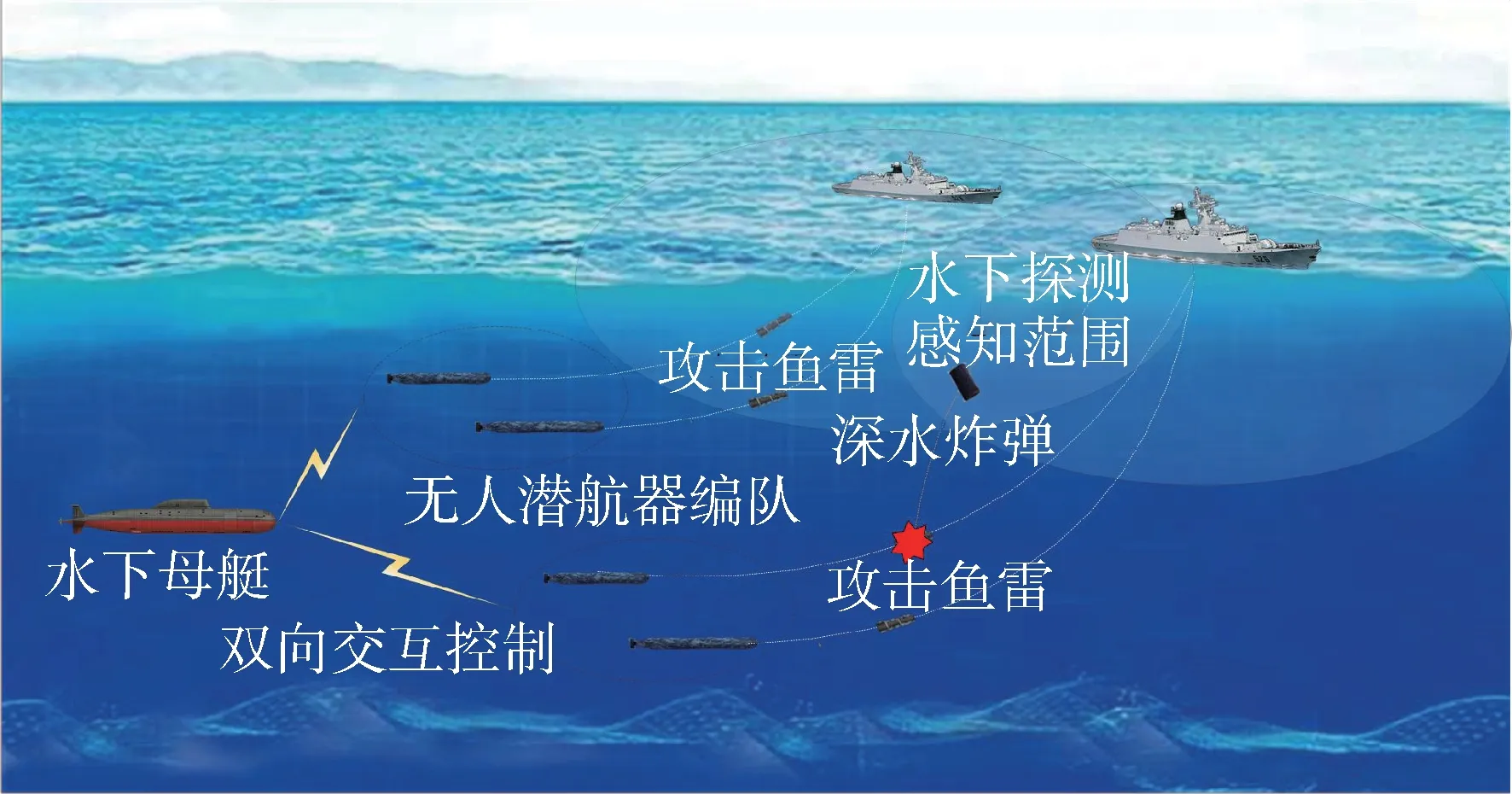
图2 半自主分布式作战运用模式Fig.2 Semi-autonomous distributed combat application mode
半自主分布式作战运用模式与被动集中式作战运用模式相比,基本能够完成对水下低速目标设定的作战任务,这也是目前水下作战实际中运用的主要作战模式。受武器装备发展制约,现行水下作战平台的运行速度普遍较低,很少出现高速度、高机动的时敏目标,而随着无人潜航器信息化水平提高,基本上能够实现对水下低速目标的跟踪监视和火力打击。半自主分布式作战运用模式是基于信息技术的进步而逐步发展起来的,从而使无人潜航器编队能够高效捕捉低速目标,自主发起水下攻击,完成作战效能评估,因此,半自主分布式作战运用模式从实战化的角度深化和丰富了无人潜航器的水下作战运用。
2.3 驻地分布式作战运用模式
驻地分布式作战运用模式是无人潜航器水下作战运用的高级阶段,该模式提出了未来无人潜航器水下智能化作战的概念,为未来水下作战趋势提供可能的发展方向。随着6G 等核心技术的突破,水下即时通信即将成为现实,为无人潜航器智能化发展提供关键支撑,同时,随着图像识别、机器学习等智能技术群的发展,未来无人潜航器水下作战的智能化水平将越来越高,实现了无人潜航器和有人潜艇水下作战的同等地位。随着智能水平的提高,使无人潜航器和水下母艇之间实现网状弹性互联,无人潜航器通过分布式全自主交互的方式,全自主智能参与水下作战行动。驻地分布式作战运用模式将改变现行的半主动分布式作战运用模式,使水下母艇和无人潜航器作为同等地位的作战节点出现,不再存在控制与被控制的关系,而是按照水下作战需求,智能科学设置作战指挥节点,这就为无人潜航器作为指控核心节点提供可能。驻地分布式作战运用过程中,无人潜航器数量不再受各类技术体制的限制,基于模块化组合原则,无人潜航器能够自由粘性接入和脱离水下作战体系,任一作战节点的毁伤都不会对水下作战能力的发挥造成致命性影响,构建起粘性铰链、柔性分布的,具有攻防一体特征的智能化作战体系。驻地分布式作战运用模式如图3 所示。

图3 驻地分布式作战运用模式Fig.3 Stationary distributed combat application mode
驻地分布式作战运用模式是未来水下作战将运用的主要模式。随着隐身技术、静音技术和推进技术的突破,水下无人潜航器的隐蔽性和机动性将得到空前提高,驻地分布式作战运用模式可以使无人潜航器智能规划路径,有效避开敌方防御区,从隐蔽区域伺机攻击,以灵活应对水下时敏的威胁。驻地分布式作战运用模式以人工智能技术群为支撑,无人潜航器利用搭载的各类传感器,智能高效地捕获时隐时现、高速机动的水下时敏目标,智能筹划作战决策、智能规划攻击火力、智能自主效能评估,保障无人潜航器能够快速实现对水下时敏目标的毁灭性攻击,因此,驻地分布式作战运用模式是未来智能化时代水下作战的重要方向,也是水下实战化运用的优化结果。
3 无人潜航器关键技术
随着智能化技术发展,无人潜航器逐渐趋向于发展成为功能完备的现代化武器平台,在未来水下作战中发挥越来越大的作用[6]。为适应水下高强度作战节奏,从提升水下作战能力的角度出发,无人潜航器将朝着下潜深度大、自主控制准和布放回收快的方向发展,以满足水下隐身突击的战场需求。
3.1 深潜通信技术
无人潜航器深潜执行水下作战任务时,与水下母艇以及相互之间都存在大量指令传输,这对无人潜航器的深潜通信能力提出很高要求,无人潜航器深潜通信的基础技术就是水声通信技术[7-8]。目前,水声通信已经实现了较高的数据传输率和很低的误码率,其中主要应用了2 种主要关键技术:一种技术是通信内容在传送前,对其进行压缩和处理;另一种更核心的技术是将信号的传送速率从1 000 提高 到 30 000 bit/s[3]。 美 国 Benthos 有 限 公 司 的 ATM系列水声通信系统,在下潜深度1 000 m 以上时,具有 4 800~9 600 bit/s 的通信速率[9]。此外,世界各国还在寻求水声通信技术的新突破,美国DARPA 研发新一代宽带、高速率水下通信技术,实现陆海空天全域网络化通信,支持有人/无人系统的联合作战[10]。
3.2 自主控制技术
自主控制技术是无人潜航器适应未来水下智能化作战的核心技术,为满足无人潜航器水下智能化控制要求,提高其水下自主作战能力,需要发展的关键技术主要包括路径规划与自主避障技术和作战任务规划技术[11]。运用路径规划与自主避障技术,发现水下障碍物时,支持无人潜航器能够重新规划水下航行路径,促使其自主智能避开水下障碍物[12]。美国海军的 LMRS 和 MRUUV 均成功运用了路径规划与自主避障技术[13]。发展作战任务规划技术,可以使无人潜航器单独参与水下作战任务,也可以使多个舰(艇)载无人潜航器进行编队作业,自主规划编队战术队形,提高无人潜航器编队的水下作战效能。在该方面取得良好效果的无人潜航器,主要包括挪威的Hugin 1000 和德国的DeepC 两大类[14]。
3.3 水下布放与回收技术
水下布放与回收技术是无人潜航器快速实施战场部署的关键技术。作为目前最为普遍仿鱼雷外形的无人潜航器,最常用的水下布放与回收技术是鱼雷发射管和导弹发射管2 种方式,攻击核潜艇搭载无人潜航器实施水下布放与回收时,一般会采用鱼雷发射管方式,该方式也是无人潜航器水下潜艇布放与回收的主要方式,美国AN/BLQ-11 无人潜航器水下布放与回收就是采用鱼雷发射管方式[15]。经过改装的导弹发射管也可以作为无人潜航器的布放与回收模块,从水下作战需求的角度出发,完成导弹发射管内无人潜航器的快速发射与回收。一个导弹发射管构成的布放回收模块,根据不同需求可以存储不同种类的无人潜航器,美国的Seahorse、BPAUV 和 SeaGlider 均可以使用此种布放与回收技术[16]。
4 结束语
本文通过分析无人潜航器的作战需求,研究了3 种无人潜航器作战运用模式,提出了支撑无人潜航器实施水下作战的关键技术。但是并未研究关键技术的成熟度,下一步,要科学论证关键技术的攻克时间,制定关键技术发展路线图,为无人潜航器参与水下作战行动提供重要支撑。
