动平台下的视轴稳定控制技术研究
2022-11-11刘洋
刘洋
(长春理工大学 吉林省长春市 130022)
1 引言
随着我国航空、航天事业的飞速发展,无论是民用飞机,还是无人飞机,都需要动平台下的视轴稳定控制技术作为支撑,来完成稳定测绘成像和跟瞄功能。在位置、姿态发生变化时,该技术能够隔离动平台振动、补偿动平台姿态变化,保证前方视轴的稳定[1-3],实现特定方向上稳定指向和特定方向上稳定区域扫描。
国外在该领域的研究较为成熟,WSC-6系统上使用了BEI公司开发的QRS10型石英叉陀螺仪,其指标达到战术级标准,现已装备在美国“捕食者”无人机平台上,可以实现稳定扫描;美国的OH-58D侦查直升机的FLIR吊舱,具有稳定捕获和夜视功能;英国的Lynx-3和以色列Msis等武装直升机搭载的稳定吊舱具有红外火探功能和夜视功能,但是由于技术保密和封锁,具体指标鲜有报道[4-6]。
国内在该领域进行研究的主要有长春光机所,华中光电所,成都光电所,长春理工大学,哈尔滨工业大学等科研院所和高校,分别进行航拍稳相跟踪研究、用于稳相的高精度双轴陀螺漂移研究和机载瞄准吊舱研究,在动平台稳瞄技术攻关中,取得了一系列丰硕成果,但是仍有不足。现阶段大部分稳定扫描系统当载荷斜挂于平台下时,在这种应用条件下,传统的控制策略并不能实现高精度稳定凝视步进扫描[7-10],另外对于现有模型,以陀螺输出量抑制平台振动的开环扫描系统精度不高,阶跃稳定效果不好,影响扫描过程中光电成像能力。
本文对动平台下的视轴稳定控制系统进行建模,分析工作原理,在倾斜安装角的条件下,设计稳瞄控制模型,采取合适控制策略,实现动平台扰动下,稳定指向功能和惯性空间自动凝视扫描功能。最后搭建实验系统进行验证,扰动台以5°,0.2Hz进行扰动模拟,系统在105ms内,视轴方位角完成2.16°阶跃后,东北天大地坐标系下稳定驻留时间优于53ms,稳定凝视扫描范围60°,在惯性空间稳定凝视功能测试中,帧间稳定精度RMS优于10urad。
2 视轴稳定工作原理
基于动平台下的视轴稳定载荷系统由光学系统、红外成像系统、反射镜系统、快反镜执行系统、激光测距收发系统、信息处理及总控系统等部分构成。其中红外成像系统完成图像接收,识别目标,同时解算目标脱靶量信息;单反射镜伺服系统是稳定凝视扫描的主要执行机构,保证经过执行器折返光路在红外相机里成像清晰、稳定,兼具捕获和跟踪功能;信息处理及总控系统主要包括单反射镜扫描、稳定、跟踪控制功能,是扫描算法及策略的实现单元。
系统中的单反镜主要完成空间的视轴稳定功能和目标跟踪功能,稳定过程主要采用惯导,由惯导对动平台姿态变化进行实时监测,与反射镜形成闭环系统,实现光束的稳定,同时在惯性空间内,完成方位60°和俯仰4°的扫描,如果在扫描过程中发现目标,迅速实现目标进行跟踪。
动平台下的视轴稳定系统原理如图1所示,包括初始指向、稳定凝视阶跃扫描、粗跟踪等功能,其控制策略由伺服控制技术实现,单反镜由编码器完成自己的位置环和速度环闭环,相机为回路提供脱靶量实现外部光闭环,陀螺数据用来抑制平台自身振动,同时为惯性空间中的凝视提供输入量,三部分协同工作实现惯性空间凝视扫描,当目标进入视场内时,迅速转入跟踪脱靶量的搜索、跟踪一体化模式。如图1所示。

图1:伺服系统工作原理
3 伺服系统设计
3.1 伺服系统模型设计
对伺服系统而言,主要需要设计光电编码器模型、低通滤波器模型和力矩电机及平台负载模型,然后根据设计的三种模型特性再设计相应的控制算法。在光电编码器的传递函数中首先要建立角位置量对时间的导数关系,即v=dθ/dt,其中v表示角速度,对上式进行差分,得到方程(1)如下:
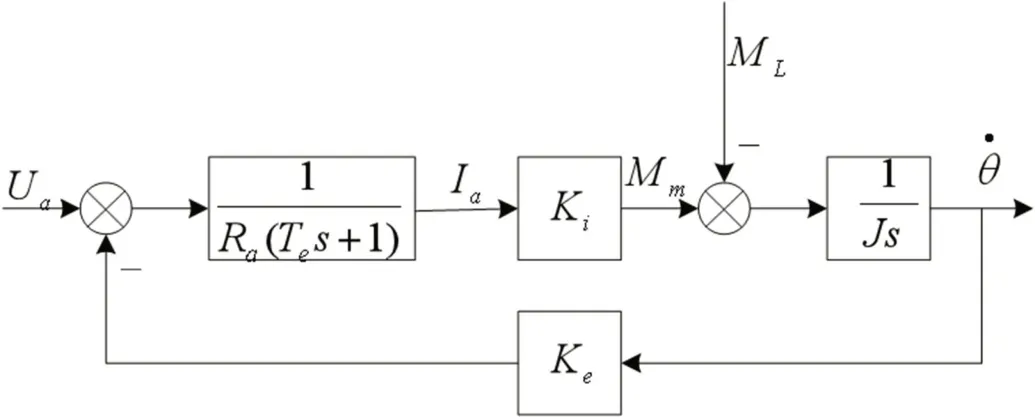
图2:反射镜负载及其扰动数学模型框图
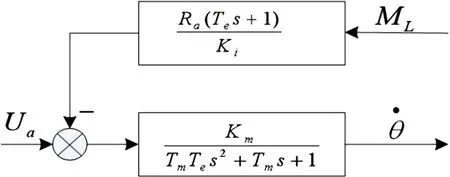
图3:伺服系统带载电机及其扰动等效框图

式中H表示轴角编码器获得的角位置信息,K表示采样时刻,Ts表示采样时间,H(K)表示K时刻的角位置量,将速度环的采样频率设定为800Hz,即Ts=0.00125,整理得到光电编码器的传递方程如(2)所示。

算法的滤波器采用一阶低通滤波器,其传递函数如方程(3)所示,

设计使低通滤波器的带宽为40Hz,传递系数为0.9,Tf=0.00398,Kf=0.9,得到方程(4)为设计的低通滤波器传递方程。

伺服系统在正常工作时会受到摩擦力矩和线阻力局等扰动,根据动力学原理和力矩电机的电枢电压平衡方程和电磁方程得到方程(5)。

3.2 伺服系统速度环模型设计
速度环控制采用双闭环复合控制,模型如图4所示。速度反馈结构中,轴角速度信息由光电轴角编码器作为速度反馈元件。扰动补偿前馈通道采用陀螺仪作为载体扰动速率的测量元件。图中的W1为被控对象数学模型,W2为陀螺仪数学模型,W3为光电编码器及滤波器数学模型,Wωc为速度内环校正环节,Wf表示惯性速率滤波器。
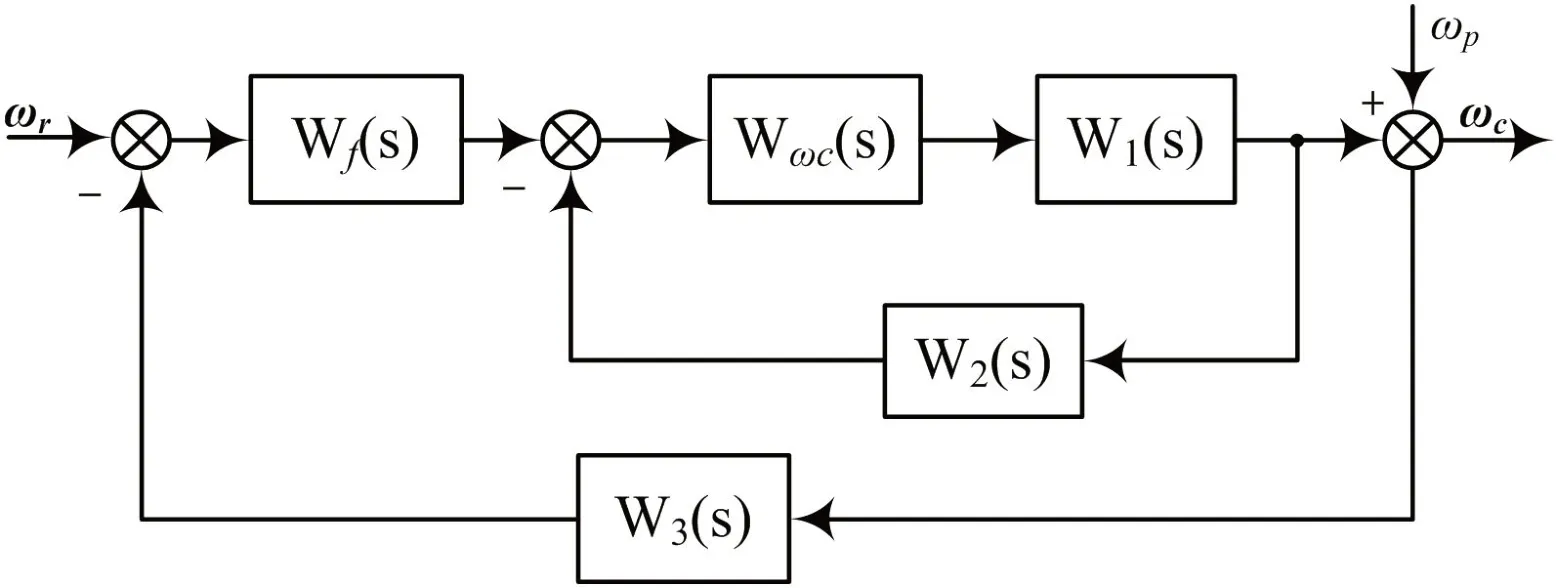
图4:反射镜速度环控制框图
由于轴角编码器角精度高,测量带宽宽,在动平台无方位运动时,扫描镜可获得较高的稳速精度。当动平台产生方位姿态变化时,通过陀螺仪产生惯性空间速率反馈信号,经过平滑滤波器滤波后,去除陀螺仪自身的随机游走信号和载体的高频抖动信号等噪声后,控制方位轴以恒定的惯性空间转速摆动扫描并拍照。为了保证具有较高的速度跟踪精度,将Wωc速度校正环节配置为具有一次积分的校正环节。使系统至少具有一阶无差度。在合理选择速度前馈补偿参数时,可使系统在动平台姿态扰动下的误差得以补偿,大大提高系统的速度稳定精度。使系统具有很高动态稳速性能。
3.3 视轴稳定模型设计
受到动平台谐振频率的限制,系统的速度环带宽不能做到很高,在这种情况下为了避免动平台摆动时速度和加速度过大导致稳定目标丢失的情况,我们设计了惯性空间视轴稳定模型,用惯导的输出量作为稳定前馈的输入量,抵消扰动信号,实现开闭环复合控制。
为了便于建模,我们将XJYJZJ定义为载体坐标系,将XYZ定义为惯性坐标系,将R定义为载体姿态横滚分量,将P定义为载体姿态俯仰分量,将Y定义为载体姿态航向分量,将Anglel、AngleX、AngleY分别定义为安装倾斜角、XYZ坐标系下的方位角、XYZ坐标系下的俯仰角,将惯性空间角度分解到动平台下的变换模型如方程(7)所示:

对方程(7)进行空间转换后得到方程(8),

最后将动平台下的直角坐标系转换为极坐标系,由方程(8)得到方程(9):
式中HX表示动平台下航向补偿角度,FY表示动平台下俯仰补偿角度。将上述补偿量用Gn(s)表示,则补偿后的误差模型为其中G1(s)和G2(s)表示前置反馈传递函数,N(s)表示扰动量。通过Gn(s)的复合校正,优化选取控制参数后,能够在有安装倾角的条件下有效补偿动平台扰动量,补偿后的残差即为En(s)。
3.4 复合轴误差分析
在复合轴控制系统中,主轴回路未稳定时,从轴不工作,此时稳定误差完全取决于主轴,相当于单粗跟踪工作状态。进入复合轴工作后,可知误差传递函数是主、从系统误差传递函数之积,系统误差近似等于从轴的稳定误差。实际工作过程中,探测器噪声和外界随机干扰都会引入到系统中,因此设计了加入噪声后的复合轴控制系统,如图5所示。

图5:加入噪声后的复合轴控制系统
引入噪声后的主、从轴误差传递函数如方程(10)和方程(11)所示:
由方程(10)、(11)推导得到总的误差传递函数为:

方程(12)中Nmain(s)表示主轴输入噪声信号,Naux(s)为从轴输入噪声信号,均包含惯导输出误差信息,Rmain(s)和Raux(s)分别为主、从轴的输入信号,当引入高斯分布的白噪声时,随着噪声增大,误差的有效抑制范围减小,影响了系统的稳定性。一般情况下,系统的稳定性取决于等效开环特性的中频段,在复合系统中,主轴的高频衰减越大,对从轴的稳定贡献越大。主轴残差的高频噪声会直接影响从轴稳定精度,尤其在带宽较小时,即俩轴误差传递函数幅频特性曲线上过零分贝峰值接近,这时噪声信号将得到一定程度的放大,降低系统的稳定度。在一级环路未进入稳定跟踪期间,二级环路不工作,因此,复合系统的先决条件是一级环路必须先稳定,稳定后二级环路精度越高,复合轴总系统误差越小,对跟踪噪声抑制越好,因此本系统中需要优化选取复合轴环路带宽,以达到最优控制。
4 动平台视轴稳定性能测试
为了验证稳定凝视扫描控制算法性能,搭建了测试系统。实验系统包括相机,用来观察成像状态;光学系统,将光折返入相机;光源,提供稳定的目标信号;摇摆台,模拟动平台扰动;稳定凝视扫描系统,是惯性空间的稳定指向、阶跃扫描和跟踪执行机构;电控箱,运行设计的控制算法实现相应功能。
在验证动平台下视轴稳定性能时,光源发出的光经过摆镜折射进系统,此时摆镜静止不动,经过伺服系统的光入射至光学系统,在相机里成像,同时摇摆台以幅度±5°,频率0.2Hz的参数摇摆方位、俯仰、横滚三个轴,模拟机载平台振动曲线,观测相机帧频设置为100Hz,此时在相机里获取脱靶量信息,将相邻两帧间的脱靶量转换成微弧度后做差,统计均方根后在上位机显示。通过测试曲线我们发现,使用设计的控制模型,惯性空间中的方位视轴稳定精度RMS为12.1μrad,俯仰视轴稳定精度RMS为13.3μrad,这种控制策略下做的开闭环反馈精度较高。
5 结论
对动平台下的视轴稳定控制技术进行建模,设计了伺服系统控制策略,包括伺服系统模型设计、速度环控制模型设计和惯性空间视轴稳定模型设计,实现了惯性空间中稳定指向和大范围快速稳定阶跃扫描。最后搭建实验系统验证设计的稳定凝视扫描控制算法性能,在有倾角安装的条件下,摇摆台以±5°,0.2Hz的谱线扰动模拟平台姿态扰动,完成了惯性空间下视轴稳定性能测试,实验结果表明设计的控制算法方位视轴稳定精度RMS为12.1μrad,俯仰视轴稳定精度RMS为13.3μrad,且伺服系统超调量小,满足扫描过程中稳定成像的要求。文中设计的伺服控制模型完成了初期的实验室验证,为动平台下的大范围搜索、跟踪提供技术支持。