永磁电机的模糊滑模参数自整定内模PI控制
2022-11-08田乐乐张辉赵丽娜
田乐乐,张辉,赵丽娜
永磁电机的模糊滑模参数自整定内模PI控制
田乐乐,张辉,赵丽娜
(齐齐哈尔大学 计算机与控制工程学院,黑龙江 齐齐哈尔 161006)
为改善永磁同步电机(PMSM)的转速跟随特性和转矩输出特性,提出了一种基于模糊滑模参数自整定内模PI的永磁同步电机控制方法(FSMC-IMPI).该方法采用模糊逻辑算法实现了滑模趋近参数的自整定,并且使用双曲正切函数代替符号函数,采用内模控制算法进行PI参数整定,简化了电流环的控制参数.该方法能有效抑制滑模抖振,提高了系统的调节速度.此外,利用该算法分别设计了模糊滑模速度控制器和内模PI电流控制器,并进行了仿真实验验证.实验结果表明,与传统的PI控制和传统滑模控制相比,所提出的模糊滑模参数自整定内模PI控制能够减小滑模控制中固有的抖振现象,并且能够有效提高系统的动态特性和鲁棒性.
永磁同步电机;模糊控制;滑模控制;内模PI控制
新能源汽车在碳中和的背景下得到了工业部门的重视,正处于高速发展阶段[1].电机驱动系统是新能源汽车的核心部分,驱动电机控制性能的好坏直接决定了新能源汽车在市场上的竞争力[2].永磁同步电机凭借体积小、功率密度高、运行可靠等优点,在新能源汽车驱动系统中作为动力源得到了广泛应用[3].针对永磁同步电机,传统的PI控制技术已无法满足新能源汽车对系统转速跟踪的实时性和鲁棒性[4].近年来,国内外学者利用非线性控制方法设计了新的控制方案,如自适应调节控制[5]、智能算法控制[6]、滑模变结构控制[7]等,其中,滑模变结构控制具有强鲁棒性、结构简单、响应速度快等优点,受到了国内外学者的广泛关注.
单纯的滑模变结构控制存在抖振现象会影响系统性能表现[8].为解决抖振问题,国内外学者尝试通过重构滑动模态、构建滑模观测器和调整滑模参数等方法,主要有文献[9]提出了用动态滑模法来减小抖振问题;文献[10]提出了改善趋近律参数达到减小抖振的目的;文献[11]提出一种动态边界层全局互补滑模控制方法以改善抖振问题;文献[12]提出了一种外加干扰观测器的方法来减小抖振.这些方法都在一定程度上削弱了抖振现象.
本文提出了模糊滑模参数自整定内模PI控制方法来提高永磁同步电机驱动系统的动态性能.针对速度外环,从智能算法与滑模控制结合的角度入手,用模糊控制算法柔化滑模控制,在重新设计滑模趋近律的基础上,采用模糊控制规则实现趋近参数自整定;而电流内环,采用内模控制算法进行PI参数整定,简化了电流环的控制参数,增强了系统的抗干扰性.
1 PMSM数学模型
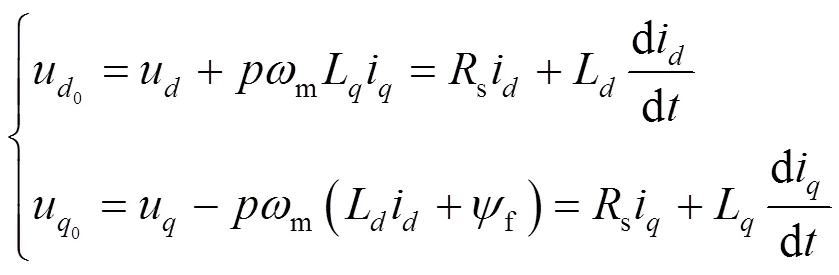
为了便于建立永磁同步电机的数学模型,假设:(1)忽略电动机铁心的饱和;(2)不计电动机中的涡流和磁滞损耗;(3)电动机的电流为对称的三相正弦波电流.由此,永磁同步电机的电压方程可描述为

考虑到机械负载,永磁同步电机的运动方程写为
2 速度环模糊滑模控制器设计
2.1 新型模糊趋近律
传统指数趋近律的表达式为
新型模糊指数趋近律设计

模糊系统主要由参数模糊化、模糊规则推理和解模糊等步骤组成.参数模糊化设计中模糊集的定义为

式中:PB为正大;PM为正中;PS为正小;ZO为零;NS为负小;NM为负中;NB为负大.

表1 确定的模糊规则表

表2 确定的模糊规则表
2.2 模糊滑模控制器
由于永磁同步电机驱动系统的控制目标是使电机转速跟踪转速的参考值,定义转速跟踪误差为
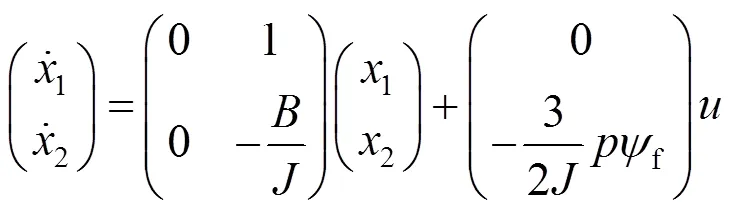
结合式(2)(3)(7)可得

定义滑模面函数为
对式(11)求导,可得

为保证三相永磁同步电机具有良好的动态品质,采用公式(6)模糊趋近律,可得控制器的表达式为


2.3 稳定性分析

成立.
定义Lyapunov函数为
对Lyapunov函数求导并结合引理得

3 电流环内模PI控制设计
对式(20)进行拉普拉斯变换后可得

当采用前馈解耦控制时,只有电机的实际参数与模型参数匹配时,交叉耦合电动势才能完全解耦.为了解决这个问题,应该选取一种对模型精度要求低且对参数变化不敏感的控制策略,而内模控制器具有结构简单、参数单一以及在线计算方便等优点,因此采用内模控制策略进行参数设计.

式中:为单位矩阵.
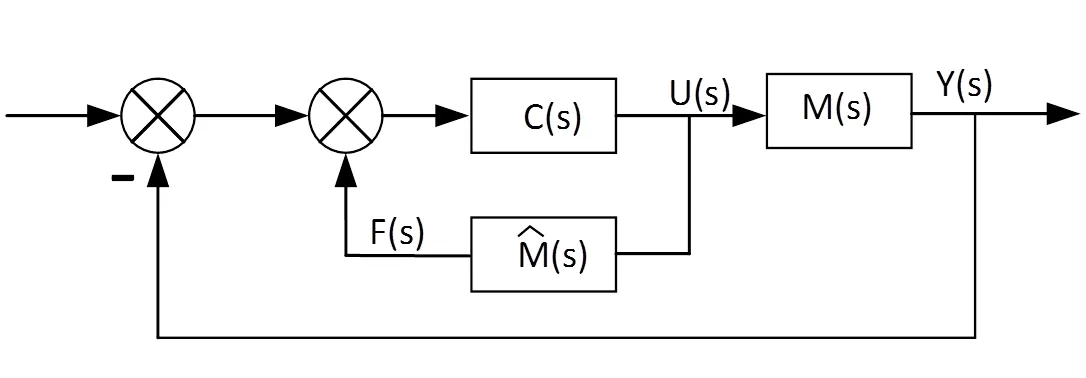
图2 内模控制等效框图

通过分析,可得PI的整定值为
综上所述,基于模糊滑模参数自整定内模PI的永磁同步电机控制系统原理框图见图3.
4 实验结果分析
采用Matlab/Simulink建立控制系统仿真模型,对本文提出的模糊滑模参数自整定内模PI控制策略进行了相应的实验验证.其中,永磁同步电机的参数见表3.
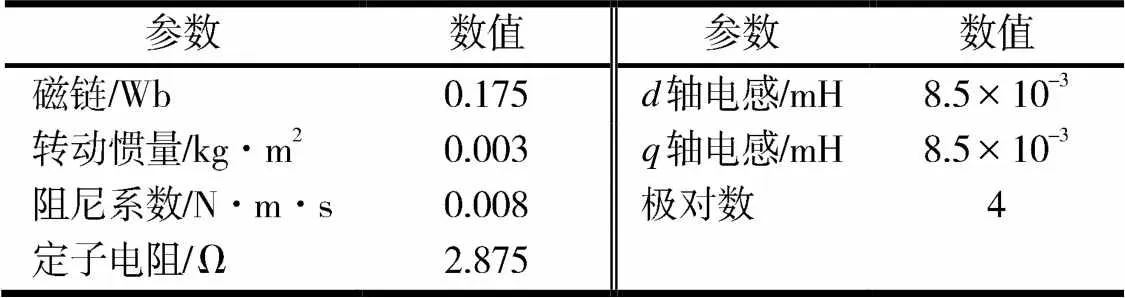
表3 电机参数
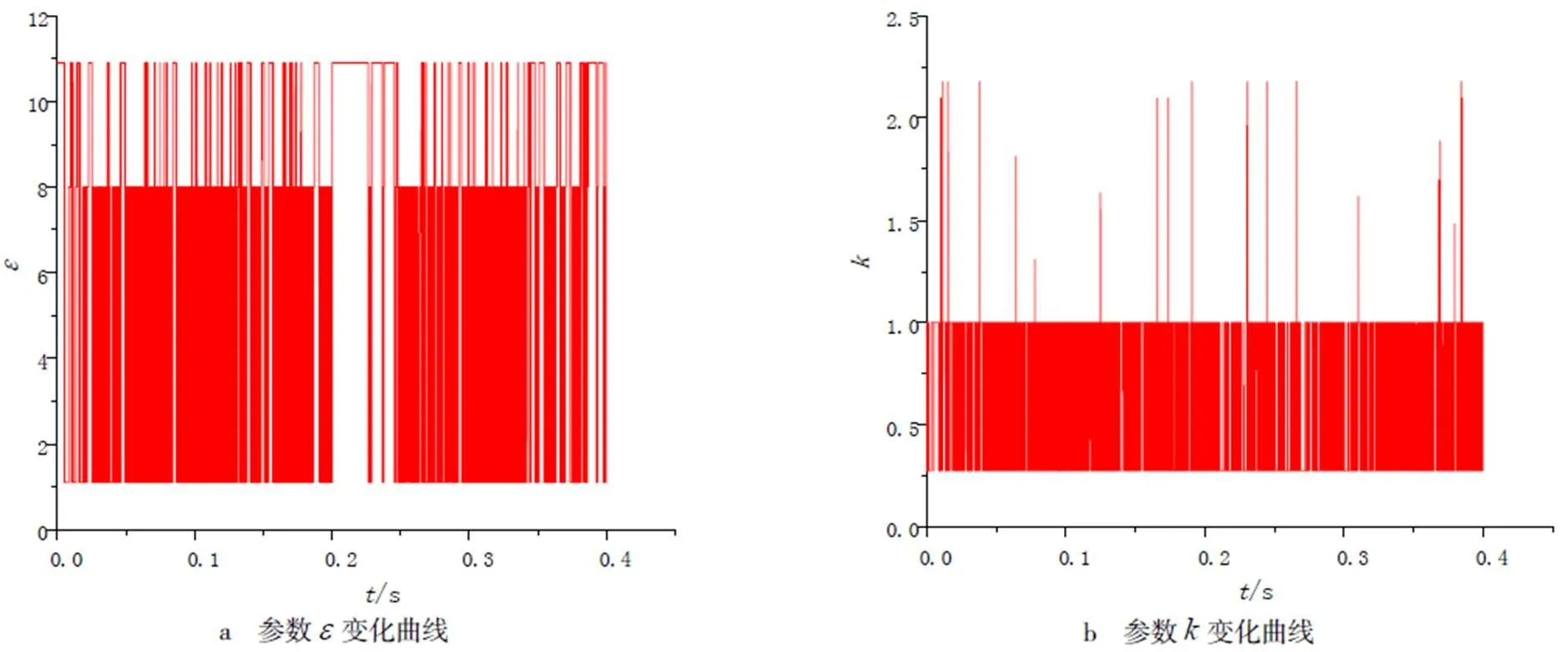
图4 和的变化曲线

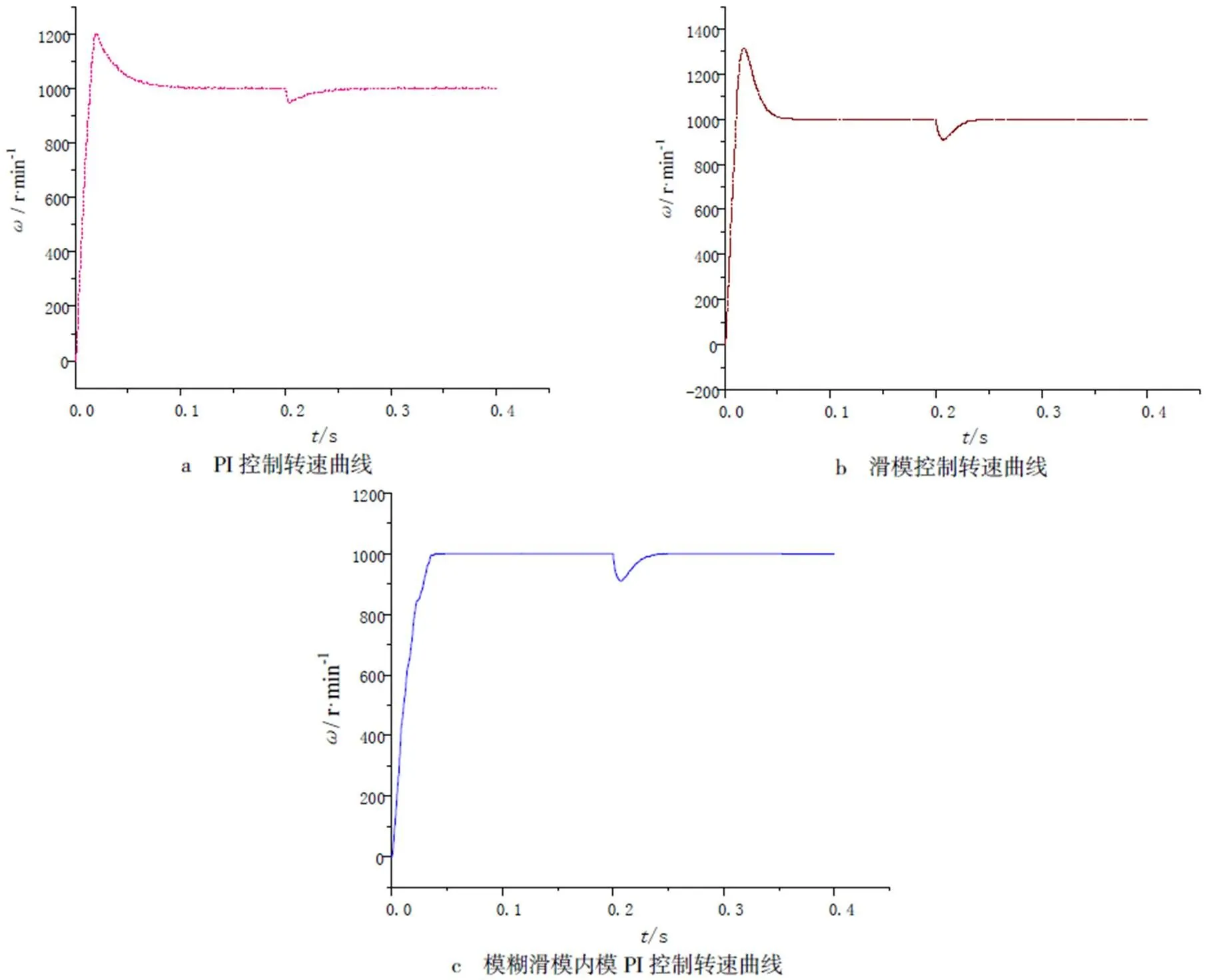
图5 3种控制的转速变化曲线
PI控制、传统滑模控制和模糊滑模内模PI控制的转矩特性变化曲线见图6.由图6可以看出,模糊滑模内模PI控制转矩输出特性平稳、反应迅速,比另外2种控制方法抖动范围小.
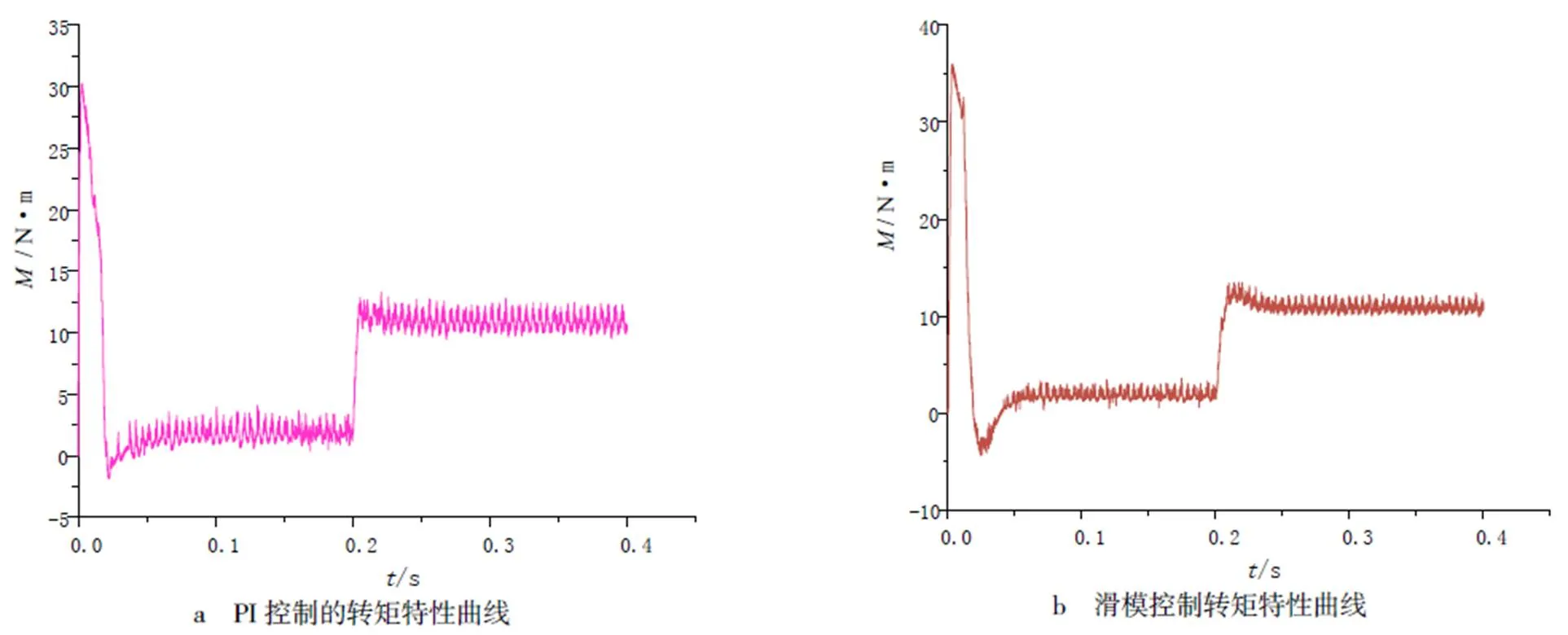
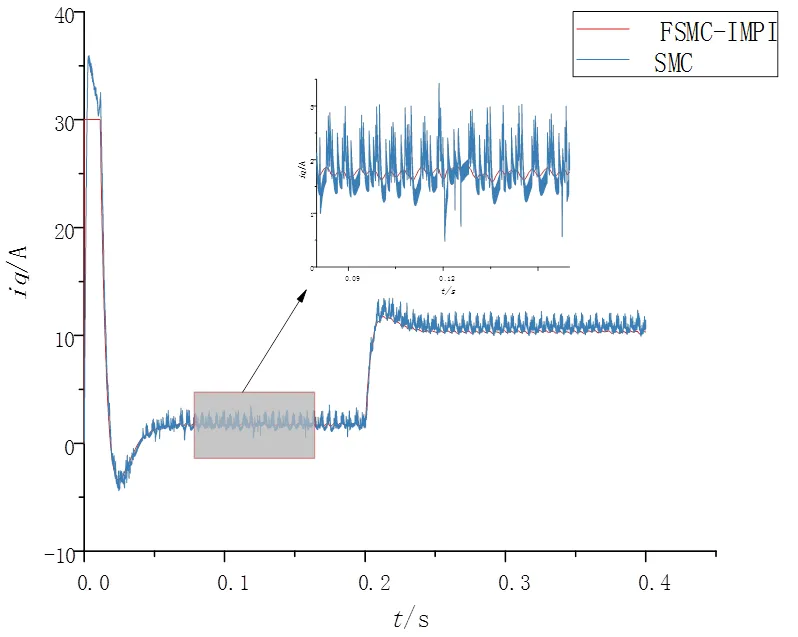
图7 模糊滑模内模PI控制和传统滑模控制的电流变化曲线
综上所述,为提高新能源汽车中作为驱动源的永磁同步电机的速度跟随特性和转矩输出特性,提出了模糊滑模参数自整定内模PI控制方法,一方面,在滑模控制的基础上引入模糊控制,使滑模参数可以在线自整定;另一方面,引入内模PI控制,简化了电流环控制参数的整定,使控制参数更加精确.通过仿真实验结果可知,模糊滑模参数自整定内模PI控制能减小滑模控制中固有的抖振现象;模糊滑模参数自整定内模PI控制方法使永磁同步电机的调速性能更平稳、无超调,相比传统PI控制调节时间缩短了33%,相比传统滑模控制调节时间缩短了20%;转矩输出准确性高,在突加负载的情况下反应迅速稳定性好,系统具有更好的鲁棒性.
[1] Su C W,Yuan X,Tao R,et al.Can new energy vehicles help to achieve carbon neutrality targets?[J].JOURNAL OF ENVIRONMENT ALMANAGEMENT,2021,297:732-738.
[2] Jiang Z,Long Y,Zhang L L.How Does the Consumers′ Attention Affect the Sale Volumes of New Energy Vehicles:Evidence from China′s Market[J].FRONTIERS IN ENERGY RESEARCH,2021,9:412-420.
[3] Toloue S F,Kamali S H,Moallem M.Multivariable sliding-mode extremum seeking PI tuning for current control of a PMSM[J].IET ELECTRIC POWER APPLICATIONS,2020,14(3):348-356.
[4] Sarsembayev B.High Order Disturbance Observer Based PI-PI Control System with Tracking Anti-Windup Technique for Improvement of Transient Performance of PMSM[J].IEEE ACCESS,2021,9:66323-66334.
[5] Jie H Y,Zheng G,Zou J X,et al.Speed Regulation Based on Adaptive Control and RBFNN for PMSM Considering Parametric Uncertainty and Load Fluctuation[J].IEEE ACCESS,2020,8:190147-190159.
[6] Zhu Z,Tian Y,Wang X Y.Fusion Predictive Control Based on Uncertain Algorithm for PMSM of Brake-by-Wire System[J].IEEE TRANSACTIONS ON TRANSPORTATION ELECTRIFICATION,2021,7(4):2645-2657.
[7] Xu B,Zhang L,Ji W.Improved Non-Singular Fast Terminal Sliding Mode Control With Disturbance Observer for PMSM Drives[J].Abbreviated Journal Name,2021,7(4):2753-2762.
[8] Hou Q K,Ding S H.GPIO Based Super-Twisting Sliding Mode Control for PMSM[J].IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS II-EXPRESS BRIEFS,2021,68(2):747-751.
[9] Wang Z,Bao W M.Second-Order Dynamic Sliding-Mode Control for Nonminimum Phase Underactuated Hypersonic Vehicles[J].IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS,2017,64(4):3105-3112.
[10] Xiong J J.Improved Sliding Mode Control for Finite-Time Synchronization of Nonidentical Delayed Recurrent Neural Networks[J]. IEEE TRANSACTIONS ON NEURAL NETWORKS AND LEARNING SYSTEMS, 2020, 31 (6): 2209-2216.
[11] Jin H Y,Zhao X M,Wang T H.Novel Load Disturbance Observer-based Global Complementary Sliding Mode Control for a Precision Motion Stage Driven by PMLSM[J].INTERNATIONAL JOURNAL OF CONTROL AUTOMATION AND SYSTEMS, 2021,19(11):3676-3687.
[12] Mbukani M W,Gule N.PLL-Based Sliding Mode Observer Estimators for Sensorless Control of Rotor-Tied DFIG Systems[J].IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS,2019,55(6):5960-5970.
Permanent magnet synchronous motor control based on fuzzy sliding mode parameter self-adjusting internal mode PI
TIAN Lele,ZHANG Hui,ZHAO Lina
(School of Computer and Control Engineering,Qiqihar University,Qiqihar 161006,China)
To improve the speed following characteristics and torque output characteristics of permanent magnet synchronous motor(PMSM),a PMSM control method based on fuzzy sliding mode parameter self-adjusting internal mode PI(FSMC-IMPI) is proposed. The method uses a fuzzy logic algorithm to realize the self-tuning of the sliding mode convergence parameters,and uses a hyperbolic tangent function instead of a symbolic function,and an internal-mode control algorithm for PI parameter tuning,which simplifies the control parameters of the current loop.This method can effectively suppress the sliding mode chattering and improve the regulation speed of the system.In addition,the fuzzy sliding-mode speed controller and the internal-mode PI current controller are designed respectively by using this algorithm,and the simulation experiments are conducted to verify them.The experimental results show that the proposed fuzzy sliding mode parameter self-tuning internal mode PI control can reduce the chattering phenomenon inherent in the sliding mode control and effectively improve the dynamic characteristics and robustness of the system compared with the traditional PI control and the traditional sliding mode control.
PMSM;fuzzy control;sliding mode control;internal mode PI
1007-9831(2022)10-0028-08
TM341
A
10.3969/j.issn.1007-9831.2022.10.007
2022-05-05
黑龙江省教育厅基本科研业务专项(135509403)
田乐乐(1997-),男,河南项城人,在读硕士研究生,从事智能电机与电气控制研究.E-mail:tll780986256@163.com
张辉(1982-),男,黑龙江齐齐哈尔人,副教授,博士,从事特种电机、智能电机与电气控制研究.E-mail:zhanghui_zdh@163.com