基于均值偏移算法与PLC技术的泵站自动化控制方法
2022-11-08曹景玉房英翠秦余朝
曹景玉,房英翠,秦余朝
(水发规划设计有限公司,山东济南250100)
0 引 言
泵站是水利工程、输油管道运输线路的重要组成部分。泵站机电设备主要由水泵、动力机、传动设施3部分组成,还包括排水、通风、计量、起重等辅助设备[1-2]。我国泵站在运行过程中,多需要根据泵站所处位置需求、泵站功能等,通过人工的方式控制泵站运行,但这会影响泵站使用效率,产生不必要的电能消耗[3]。针对于此,国内外相关学者研究出遥测、车削叶轮、遥调、自动化系统、遥控、智能化仪表、遥信、中央控制系统、主监控系统、变频调速等控制方法[4]。在国内外研究基础上,文献[5]将PLC技术与物联网技术相结合,设计出一体化泵站控制系统,实现泵站的远程联动。文献[6]面对泵站传统控制方法存在的问题,引入嵌入式系统,计量泵站参数,实现泵站高精度控制。
总结以往研究经验,针对电能消耗大、水泵机组运行效率低的问题,本文提出基于均值偏移算法与PLC技术的泵站自动化控制方法,基于泵站自动化运行模型,设置泵站数学模型和跟踪目标数学模型的距离函数最小值,采用均值偏移算法,在可编程控制器功能中,以最小值对比各个矢量,获取梯度信息,跟踪参数,完成泵站自动化控制。
1 基于均值偏移算法与PLC技术的泵站自动化控制方法
1.1 泵站自动化运行模型
泵站主要分为建筑设施和机电设备两部分。其中,建筑设施部分主要由进水建筑物、泵房、出水建筑物、变电站等部分组成[7]。机电设备主要分为主机设备和辅助设备。水泵是泵站的重要设施,通常由水泵、动力机、传动设施3部分组成,也是泵站的主机组。辅助设备由充水设备、排水设备、通风采暖设施、计量设备、起重设备等组成[8]。泵站自动化运行模型如图1所示。

图1 泵站自动化运行模型
如图1所示的泵站自动化运行模型,可以采用气穴余量、流量、扬程等基本参数表示泵站工作性能。且其在运行过程中,任意参数变化都可以影响其他参数。为此,依据图1所示的模型,采用均值偏移算法,跟踪泵站基本运行参数。
1.2 基于均值偏移算法跟踪泵站运行参数
此次跟踪泵站运行参数,在均值偏移算法基础上,引入核直方图,设计泵站运行参数跟踪算法。泵站数学模型B为
B={bu}u=1,2,…,n
(1)

跟踪目标数学模型Q为
Q(y)={qu(y)}u=1,2,…,n
(2)
γ(y)=γ[qu(y),bu]
(3)
式中,γ(y)为似然性。此时,需要在直方图中,求取γ(y)的最大值。为此,引入核权值计算泵站数学模型与跟踪目标数学模型中特征的概率
(4)
(5)
式中,k为核轮廓函数;xi(i=1,2,…,m)为泵站数学模型中第i个标准化参数;m为标准化参数数量;A1、A2均为标准化因子;ε为Kronecker delta函数;a(xi)为n级量化函数;h为带宽[10]。
跟踪泵站运行参数时,泵站数学模型和跟踪目标数学模型的距离函数应该为最小值。所以采用均值偏移算法矢量提供的梯度信息,初始化目标数学模型参数值,计算{qu(y)}u=1,2,…,n,求取bu和qu的线性近似γ[qu(y0),bu]值,得到qu在直方图上的初始值y0,则有
(6)
由式(6)计算得到的在初始特征值附近不发生急剧变化时,采用式(7)计算{qu(y)}u=1,2,…,n的特征权值wi为
(7)
根据式(7)计算结果,采用式(8)确定下一个跟踪目标
(8)
式中,y1为下一个跟踪目标值[11]。

1.3 基于PLC技术设计泵站自动化控制器
由于PLC型号广泛,所以依据图1所示的泵站自动化运行模型,选择适宜泵站自动化控制的PLC技术,设计泵站自动化控制器。根据PLC的特殊功能模块、通信能力、I/O模块等,以最优性价比为基准,满足泵站自动化控制要求为目标,选择在通讯网络、可编程序控制器功能等方面具有独特的优势的Rockwell Allen-Bradley型PLC。
基于此次研究选择的PLC,采用模糊控制规则,设计如图2所示的泵站模糊自动化控制器。

图2 泵站模糊自动化控制器
图2中,u表示输入变量;z表示输出变量。图2所示的控制器将均值偏移算法跟踪得到的泵站运行参数作为控制器的输入量,依据控制器中的控制规则,在控制器的推理机作用下,实现泵站自动化控制。建立控制器规则库,从而实现输入量模糊化。
假设输入控制器参数的偏差额为e,其基本论域为[-e,e],偏差变化率为e′,其基本论域为[-e′,e′],控制器控制输出变量基本论域为[-u,u]。
依据泵站运行参数,在基本论域基础上,e选取的论域精确值为{-N,-N+1,…,0,N-1,N},e′选取的论域精确值为{-M,-M+1,…,0,M-1,M},控制量u选取的论域精确值为{-L,-L+1,…,0,L-1,L}。与此同时,为输入变量选取的语言变量值为正大Pmax、正中Pavg、正小Pmin、0、负小Smin、负中Savg、负大Smax7种。
基于上述7个语言变量,按照式(9)的形式,组成控制器规则库
ifuisPmax,thenzisPavg
(9)
根据式(9)所示的规则库形式,在e、e′、u上所决定的三元模糊关系R为
(10)
式中,k为模糊规则库中拥有的规则数量;Rj(j=1,2,…,k)为第j条规则对应的模糊关系[13]。依据上述计算过程,完成规则库建立,并根据规则库,得到式(9)所示的推理过程,从而实现输入量的模糊化与输出量的去模糊化。
在此次研究选择的PLC中,通过PLC的可编程序控制器功能,编写图2所示的泵站模糊自动化控制器,结合泵站运行参数变化,实现泵站自动化控制。
2 自动化控制应用
为验证上述基于均值偏移算法与PLC技术的泵站自动化控制方法,选择某区域的取水泵泵站作为此次实验研究对象,检测实验对象在此次研究方法自动化控制节能效果。
2.1 取水泵泵站运行工况
某取水泵泵站一直用于引水工程,每天取水量在180万~280万m3之间,其1小时的取水量在75 000~110 000 m3之间变化。由于每天取水量不固定,其泵站取水泵机组工作数量在6~10台之间,工作频率在36~45 Hz之间,以最近一天取水泵机组运行情况作为此次实验数据,如表1所示。
泵组电耗和效率的计算公式为
(11)
(12)
式中,h为扬程;η为泵组效率;ω为泵组电耗;ρ为液体密度;t为泵运行小时数;W有效为水泵的有效功率;V为流量;W轴为水泵的轴功率;η2为电机的效率值;g为重力加速度;η1为泵的效率值。
从表1中可以看出,此次实验选择的泵站取水量变化主要分为4个时间段,其中5~7 h属于低峰期,16~24 h为高峰期。

表1 最近一天取水泵机组运行情况
2.2 实验方法和步骤
依据表1所示的取水泵机组取水量数据,选取10台取水泵机组,取水量80 000~125 000 m3,进行自动化控制泵站节能实验。在实验过程中,取水量按照5 000 m3大小递增,同时,将机组开机数量控制在5~10台之间,频率控制在36~50 Hz之间。其实验步骤如下:
(1)开启实验设置最低机组数量,调整机组运行频率,当出水总量达到80 000 m3时,停止机组运行频率调整,记录该运行频率下机组工况总管流量、压力、总电量等参数。
(2)再次调节机组运行频率,在初始出水总量的基础上,递增5 000 m3的出水量,并记录机组此时的工况总管流量、压力、总电量等参数。
(3)继续调整机组运行频率,让取水量达到泵站取水量工况最大值,并记录对应的机组运行参数。
(4)逐台增加机组,分别在不同机组数量下,取80 938~104 976 m3大小的水量,并记录机组对应的运行参数。
(5)整理上述4步记录的实验数据,分析此次研究方法自动化控制泵站节能效果。
2.3 应用效果分析
2.3.1 泵站节能控制数据
根据此次实验步骤,在不同机组台数下,获取泵站不同时流量,所采用的机组运行频率值,以及其消耗的电量值,如表2~7所示。
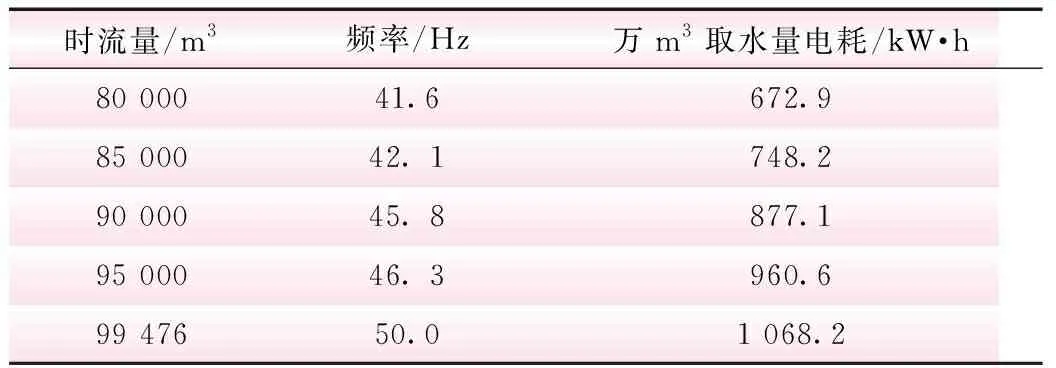
表2 5台水泵节能控制数据

表3 6台水泵节能控制数据
从表2~7中可以看出,此次研究方法自动化控制泵站时,可以根据泵站运行时流量需求,自动化控制水泵机组开机数量和运行频率,其得到的最优泵站运行机组数量为7。

表4 7台水泵节能控制数据

表5 8台水泵节能控制数据

表6 9台水泵节能控制数据

表7 10台水泵节能控制数据
2.3.2 泵站节能效果
基于表2~7所示的泵站节能控制数据,得到的最优泵站运行机组数量,按照表1所示的运行工况,运行此次实验选择的泵站,其得到的取水电耗与泵组效率值如表8所示。

表8 泵站取水电耗与泵组效率
从表8中可以看出,此次研究方法自动化控制泵站后,相较泵站原本的运行工况,万m3取水量电耗分别减少了90.7、33.5、77.9、68.1 kW·h,效率分别提高了2.9%、2.2%、4.7%、14.23%。可见,此次研究方法,自动化控制泵站后,可以节约泵站能耗,提高水泵机组运行效率。
3 结 语
本文运用均值偏移算法设计的泵站自动化控制器,通过自动化控制泵站运行,达到了节约泵站运行能耗,提高泵站水泵机组运行效率的目的。但是受时间限制,未考虑泵站自动化控制抗干扰能力。在今后的研究中,还需深入研究泵站自动化控制技术抗干扰能力,进一步提高泵站自动化控制性能。