无人机巡检图像下的装配式管线移位分析方法
2022-11-07雍歧卫段纪淼
王 晧,雍歧卫,方 钢,段纪淼
(陆军勤务学院, 重庆 401331)
0 引言
装配式管线是一种在应急条件下使用的机动管线系统,能执行大批量、长距离的输油或输水任务。在实际使用当中,通常临时铺设和连接组装,用完即可撤收。与固定长输管线相比,具有机动性强、展开快速、方便灵活等优点[1-2]。在装配式管线执行输送任务的过程中,可能由于各种原因,如暴雨或泥石流冲刷、车辆冲撞,会造成管线移位。每2根装配式管线间采用连接装置连接,当管线移位导致两管线偏折角度超过阈值时,连接装置将会失效,从而造成液体泄漏甚至管线脱落跑油。以往遇到装配式管线移位问题时,巡线人员基本全凭经验进行主观分析,对于是否确认为隐患点,没有合适的量化分析手段。因此,需要一种快速、有效的方式,准确分析移位是否超过阈值,以便及时处理隐患管段,避免发生漏油、脱管事故。
传统人工巡检的方式需要巡线人员沿线路行进检查,受地形和天气限制,容易造成巡线人员受伤或线路检查不到位,巡检效率偏低。随着近年来无人机(unmanned aerial vehicle,UAV)技术的飞速发展,采用无人机平台搭载合适的遥感传感器对油气管线展开巡检工作,可作为人工巡检的有力补充手段,大大提升巡检效率[3]。装配式管线通常裸露在地面铺设,使用无人机能够直接观察到管线情况,所以使用无人机巡检的方式在装配式管线中更有优势。
1 无人机管线巡检系统
1.1 国内外发展现状
无人机最早出现在上世纪初期的英国,初期的研发方向主要为军事领域的训练靶机和空中侦察机,一直到上世纪九十年代开始应用于常规领域,并迅速发展[4]。得益于无人机灵活机动、起降受场地影响小、作业周期短、与载人航空器相比成本低等特点,现已在军事侦察探测、火力打击、通信中继,与商用航测遥感、电力线巡检、大气监测、林业调查、应急救援等行业有了较为成熟的应用[5-6]。将合适的遥感传感器设备搭载在无人机平台上,同样对油气管线自动巡检的实现有着重要意义。
无人机管线巡检系统是一套利用无人机遥感采集地面管线信息,并对所采集的图像和数据进行处理分析,能够实时监测地面管线状态参数、准确判断危险隐患点的智能化系统。其关键技术包括无人机飞行控制、图像识别、无线通信、GPS差分定位、GIS多源融合等技术[7-8]。在油气管线无人机巡检的应用方面,很多国家和地区已经把该种方式作为一种常态化的油气管线巡护业务推广并使用。如英国的CyberHawk公司,为欧洲、美洲、亚洲的许多国家提供石油设施无人机巡检服务,运营多年,技术成熟,其客户中不乏壳牌石油等国际大公司;英国陆上石油天然气组织在2010年研发出flare stacks系统,该无人机巡查系统能够在油气设备正常运行时开展巡检作业,大大降低巡检的风险;英国石油公司(BP)还在2012年成立专门的研究小组,针对美国境内的阿拉斯加普拉霍湾石油管线进行无人机巡检系统的研究和运营工作[9]。美国研制的机载激光雷达管线巡检系统(ALPIS),采用差分激光雷达传感器进行巡检,根据激光回波原理远程监测空气中的油气浓度,并可在地面站实时监控地图上显示,同时结合其搭载的GPS系统能够精准定位泄漏点[10]。此外,还有MDA公司为加拿大的油气管线设备设施提供监测、巡检服务,其巡检无人机主要搭载光学相机与红外成像仪;Aerostar公司为防止地质灾害和不法破坏,采用无人机对阿塞拜疆的巴库油田周边的石油管线进行常态化巡检服务;香港机电工程署对地区内众多难以到达的油气管线覆盖区域进行无人机巡查,并用其无人机搭载的气体探测器进行泄漏检测[3]。
近几年,我国油气管线和油气田企业也纷纷开始研究无人机巡检技术在行业内的应用。中国石油管线公司在这方面起步较早,最早开始在西部的兰成渝管线中使用无人机遥感技术进行管线巡查、油气监控,目前还在起草《油气管线无人机巡护技术规范》,推动无人机巡护油气管线技术快速发展[11-12]。2016年,上海禾赛光电科技有限公司研发出无人机甲烷遥测系统,能高效检测出管线油气泄漏。2020年,天宇经纬科技有限公司选择中石化华东管网在江苏地界内的南京至镇江段管线共83 km作为试验对象,在无人机巡检的同时,实现全程5G通信下的网络化测控和信息分发,强化了无人机巡检系统的信息化水平[13-14]。
1.2 系统组成
无人机管线巡检系统的组成,根据其侧重功能的不同,可能会在功能性模块和载荷等方面有一定区别,但基本可分为5个部分:无人机平台、飞行控制系统、地面控制站、无线通信系统、传感器载荷。
常见的无人机平台按照飞行原理可分为固定翼、直升机、多旋翼3种,其在续航能力、飞行速度、飞行高度、灵活性等方面各不相同,根据任务不同应选用不同飞行平台[15]。多旋翼无人机以其起降对地形要求低、机动灵活、可空中悬停等优点在巡检中一般应用较多。飞行控制系统一般由全球定位系统(GPS或北斗系统)、惯性导航系统(INS)、多普勒航向参考系统等组成,用于掌握无人机位置、姿态等信息,控制无人机飞行[16]。地面控制站一般用于对飞行参数、传感器参数的实时监测与控制[17]。无线通信系统是无人机与地面控制站数据传输的桥梁,当无人机飞行距离过远时,可以视情况开设中继站以保证通信质量。传感器载荷是无人机采集数据、感知信息的核心,主要包括:光学相机、红外传感器、多/高光谱成像仪、合成孔径雷达、激光雷达[18]等。
本文提出的装配式管线移位检测方法,对无人机巡检系统的硬件设备要求不高,仅需光学相机采集的图像资料便可完成检测,具有经济性、实用性,普通消费级无人机也可适用。
2 装配式管线移位分析模型
2.1 移位阈值界定
装配式管线按连接方式不同可分为槽头式钢质管线与承插式钢质管线。在受到外力产生移位后,如果相邻两根管子间的偏转角度超过管子接头最大允许偏转角(槽头式为4°,承插式为2°),则管线接头极易发生泄漏、脱落、断裂等安全隐患。
2.2 移位特征分析模型
一段铺设基本为直线状的地面管线受到较大外力冲击时,通常会发生如图1所示的移位变化,其中,受力中心管段呈同向弯曲(与冲击外力同向),如图中ABC段,而其两端的管子由于受到线路其余管子的约束,呈反向弯曲状态,如图中CDE段。

图1 管线移位分析图
对于同向弯曲管段ABC,假设弯曲段管子数量为N,各管子之间的偏转角度均为φ,取弯曲段对称的一半进行分析,若不考虑管子自身的弯曲变形,则管子①两端的相对偏移量为:
(1)
管子②两端的相对偏移量为
(2)
管子③两端的相对偏移量为
(3)
依次类推,第N/2根管子(N为偶数)两端的相对偏移量为
(4)
因此,对于总管子数为偶数根N的弯曲段ABC,其弯曲矢度为
y=Δy1+Δy2+Δy3+…+ΔyN/2=
(5)
式中:y为同向弯曲管段的弯曲矢度;l为单根管子长度,一般为6 m;φ为管子之间的偏转角;N为同向弯曲管段内偶数管子总根数。
若同向弯曲管数为奇数,则弯曲段中间一根管子呈平直状态;减去该管后,弯曲管数量成为偶数,弯曲管段的弯曲矢度则为
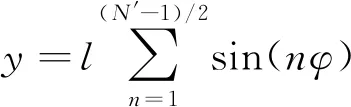
(6)
式中N′为奇数弯曲管数。
若管线发生移位使管子间的偏转角达到最大允许值,则不同管子数量时,该管段的允许弯曲矢度如表1所示。
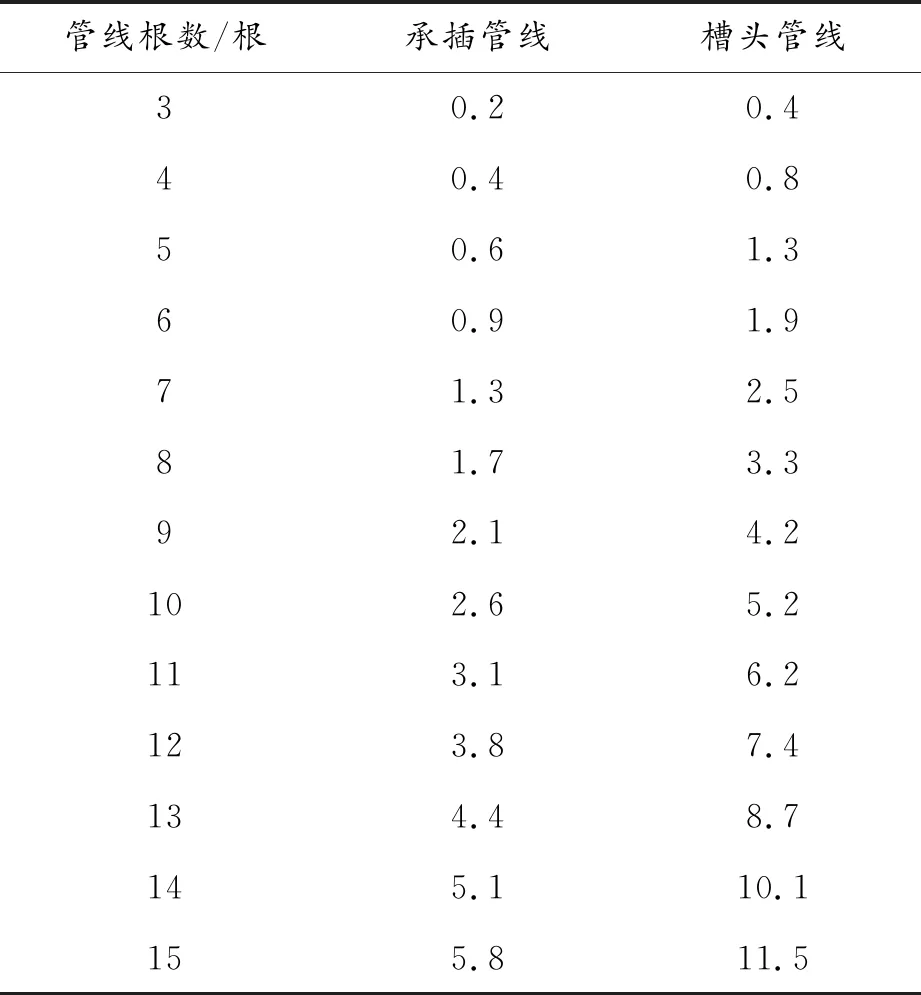
表1 管段允许最大弯曲矢度对照表 m
因此,测量同向弯曲管段的实际弯曲矢度,根据该管段管子根数,可判断其是否超过表1所示的允许值,若超过,则报警提示巡线人员重点关注。
对于反向弯曲的管段CDE,其最远端C偏离原管线位置EF的距离为
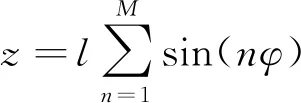
(7)
式中:z为反向弯曲管段的最大偏移量;M为反向弯曲管子总根数。
与前述方法相同,测量反向弯曲管段的最大偏移量z,根据该管段管子根数,可得到管子之间的偏转角,若其超过相应管子的最大允许折角,则报警。
3 功能实现及验证
3.1 功能模块开发
管线移位分析功能模块以Visual Studio 2013开发环境和Qt5.7 图形用户界面应用程序框架为平台,采用 C++开发,运行环境支持Windows 7与windows 10。具体功能实现流程如图2所示。

图2 管线移位分析流程框图
3.2 功能操作与实现
打开软件,导入拼接完成后的实景图,在实景图上,先点击未发生偏移的管子两端,确定管线的原始未偏移走向,再点击偏移(或弯曲)管段的最远偏离点,弹出图3所示界面;计算(清点)偏移(或弯曲)管段中的管子根数,将其输入图3所示界面“输入管子根数”栏中,并选择管线类型(承插管线或槽头管线),点击“计算”按钮,软件界面自动弹出计算分析结果。如果结论显示该管段“危险”,表明应该前往现场检查处理;如果结论显示“安全”,则进一步对该管段内相邻管子偏转明显的接头进行偏转角度检查,如图4所示。

图3 管线移位分析操作界面

图4 管线接头偏转角度测量操作界面
3.3 实验验证及结果分析
选择在空旷场地进行实验验证,采用槽头式钢制管线,管线根数为8根。巡检用无人机型号为WK6-1550,该六旋翼无人机外形如图5所示。

图5 实验用巡检无人机
无人机挂载为CCD相机SNOYA-5100如图6所示,该相机质量仅0.3 kg,具有了高清变焦功能,有效像素不低于2 430万;快门速度可达30-1/3 200 s,支持遥控一键拍照、录像等功能。此款相机能够满足管线线路巡检的精确拍摄要求,并能实时传回高清图像资料。

图6 载荷SONYA-5100 CCD相机
实验过程,将8根槽头式管线连接完毕后,人工调整每根管线间的偏转角度,再通过无人机巡检系统进行航拍,将采集的图像导入开发的管线移位分析软件进行建模分析;重复进行20组。部分实验过程管线情况如图7—9所示。

图7 实验管线场景图1

图8 实验管线场景图2

图9 实验管线场景图3
实验结果如表2所示。

表2 实验结果
在实验结果为安全的管段中,有2处存在某接头处明显弯曲角度过大情况,经测量大于4°,也应进行调整。
实验结果表明,通过提出的数学模型及软件对无人机巡检图像中的管线移位情况进行分析,操作简单,数值精确,分析可量化,明显优于人工判断的分析方式。
4 结论
装配式管线输送介质通常为成品油料,对安全性要求高,同时管线分布地域广、点多线长、部分区域条件恶劣,给巡检工作带来一定难度。使用无人机对装配式管线进行巡检作业,能够克服人工巡检速度慢、视野窄、特殊地域难到达等缺点,达到提升效率的目的。
本文提出的基于无人机采集图像分析管线移位情况的方式,能将原本凭经验检测的内容以量化数据形式显示,对管线安全隐患的快速判别预警有重要作用。经过验证,该方法有较强可行性和实用性,能够有效提升装配式管线输送过程的安全性、可靠性。
下一步研究还需探索新方式、新算法,加强无人机巡检系统的数据处理、分析能力,提升系统智能化水平,使管理者能够实时掌握全线情况,及时排查隐患管段,快速发现线路泄漏、跑油等事故,并根据情况合理分配抢修维护力量。