改进PLL的永磁同步电机无传感器控制研究
2022-11-07姚国仲王贵勇
姚国仲,李 涛,郝 剑,王贵勇
(昆明理工大学 云南省内燃机重点实验室, 昆明 650500)
0 引言
永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率密度高、动态响应快、过载能力强等优点,在发动机油泵、水泵、增压器和电池冷却风扇等汽车电气化领域获得了广泛应用。对于PMSM控制而言,机械式传感器的工作精度易受外部环境变化的干扰,导致系统可靠性降低,且传感器的安装和信号处理电路的增加会使电机控制系统的体积和成本增加。因此,无感PMSM的电机转子位置的精确识别和跟踪算法一直是工程应用研究的热点[1-2]。
PMSM无传感器控制算法主要分为基于基波数学模型的控制方法[3-6]和高频信号注入方法[7]。基于基波数学模型的卡尔曼滤波[8]、模型自适应[9]和滑模观测器[10]等算法因不易受电机敏感性参数变化的影响而获得广泛应用。但基于基波数学模型的算法在PMSM控制中需要提取电机反电动势对应的转子位置和速度信息,且反电动势总是会受到电机磁场、温度变化或逆变器非线性等因素的影响,使得观测误差增大,导致PMSM控制系统的稳定性和可靠性降低。针对基波数学模型类算法的缺陷,学者们提出了锁相环(phase-locked loop,PLL)技术,用于补偿反电动势中谐波带来的估计误差。PLL技术具有不易受噪声干扰、算法简单和响应快等特点[5,9-12]。Sun等[13]提出一种基于PLL和二分法的迭代搜索策略,能够获得较高精度的转子位置角信息,但其计算过程复杂,实时性较差。孙大南等[14]针对传统电压模型磁链观测器中引入低通滤波器带来幅值相位误差问题,用带通滤波器来减小误差,但没有考虑因电机参数变化引起的电机幅值不匹配的问题。金鸿雁等[15]提出一种使用正交PLL锁相环相结合的滑模观测器,虽减少了滑模控制带来的抖振现象,但忽略了反电动势中的高频成分影响,导致估计精度降低。
针对PMSM无传感器控制中的转子位置估计误差较大、幅值不匹配以及谐波干扰等问题,在滑模观测算法的基础上,提出一种新的PMSM无传感器控制算法——改进PLL的滑模观测算法。设计了自适应滤波器来抑制反电动势的次级谐波干扰,提升了系统的转子位置和速度估计精度,并进行幅值归一化匹配处理,解决了因电机参数变换引起的幅值失配问题,从而提升了电机控制系统的抗干扰能力和动态响应速度。
1 PMSM的数学模型
图1为d-q同步旋转坐标系与α-β静止坐标系的位置关系示意图,θe为转子的位置角度。

图1 两坐标系间的位置关系示意图
在d-q同步旋转坐标系下,PMSM的电压方程可表示为:
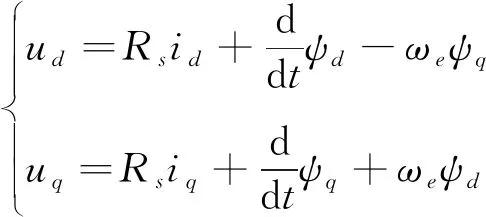
(1)
定子的磁链方程为:
(2)
式中:d/dt为微分算子;ud、uq,id、iq,Ld、Lq,ψd、ψq分别为d-q坐标轴上的转子电压分量,电流分量,电感分量,磁链分量;R为定子电感;ωe为转子电角速度;ψf为永磁体磁链。
通过反Park变换,α-β静止坐标系下的电压方程为:
(3)
式中:uα、uβ、iα、iβ分别是α-β轴下的定子电压分量和定子电流分量;Ls为定子电感。
2 无感PMSM的滑模观测器算法
传统滑模观测器(sliding-mode observer,SMO)的PMSM无感算法是基于α-β静止坐标系下的电机数学模型设计。利用扩展反电动势的基波数学模型,将式(3)变换为电流状态方程式,滑模观测器设计表达式为:
(4)

(5)
联合式(3)—(5),可得滑模估计的误差函数为:
(6)
式中:vα、vβ表示为PMSM的扩展反电动势。
如果滑模增益k足够大,即k>max{|vα|,|vβ|},当观测器的状态变量到达滑模面,且观测误差一直稳定时,观测器将一直保持在滑模面上。这意味着观测状态可以在有限时间内收敛到sn=0。因此,滑模控制函数与反电动势值之间的关系为:
(7)
从式(7)中可以看出,符号函数sgn(sα)和sgn(sβ)项包含转子位置信息。传统滑模观测器中大都使用反正切函数进行角度计算,而符号函数会导致反电动势估计结果出现较大波动,使电机控制系统出现抖振。此外,在电机转速计算过程中包含微分计算,微小的角度偏差也将导致较大的速度误差。在多个因素的叠加下,最终导致传统滑模观测器的转子位置估算结果不精确。
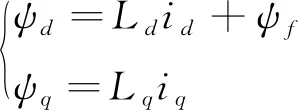
基于PLL结构的转子位置估算法来计算转子位置角度,可使滑模观测器的估算结果更加精确和稳定。如图2所示,传统的锁相环由鉴相器(phase detector,PD)、环路滤波器(loop filter,LF)、压控振荡器(voltage-controlled oscillator,VCO)3部分组成。首先,通过PD将输入电压信号与输出电压信号作差得到误差电压;其次,为消除误差电压中的噪声信号,将得到的误差电压通过LF进行滤波;最后,使用VCO将滤波处理后的误差电压作用等效成相位环节。在环路锁定时,压控振荡器频率与输入电压相位差不再随时间变化,从而保持相位跟踪。
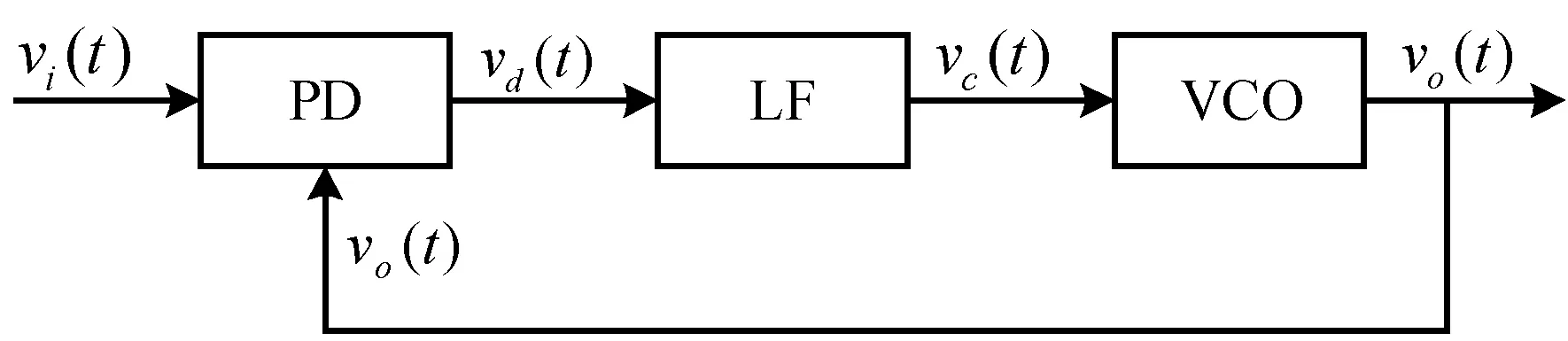
图2 基本闭环PLL结构示意图
通常使用的PLL是一种非线性闭环控制系统,其控制框图如图3所示。
图3 PLL控制框图
因为反电动势信号中含有次级谐波,得到:
(8)
式中:E为反电动势电压的幅值;n(t)为次级谐波项。
根据图3,得到如下关系式:



(9)
式中:Δv为PLL的鉴相器单元输出的估计误差。
3 改进PLL的滑模观测器的设计
3.1 自适应滤波器
为保证PLL系统不受反电动势信号中谐波的干扰,一种有效方法是在PLL的输入端使用预滤波器,滤除反电势中的谐波成分后可得到基波正序。设计自适应滤波器的结构如图4所示,自适应滤波器由多个滤波单元组成,这些单元并行排列,协同工作。
图4中,vα,β是自适应滤波器输入信号反电动势信号;vα,β1、vα,β2、…、vα,βn是反电动势中估计的基波和谐波序列分量;n为谐波阶数。
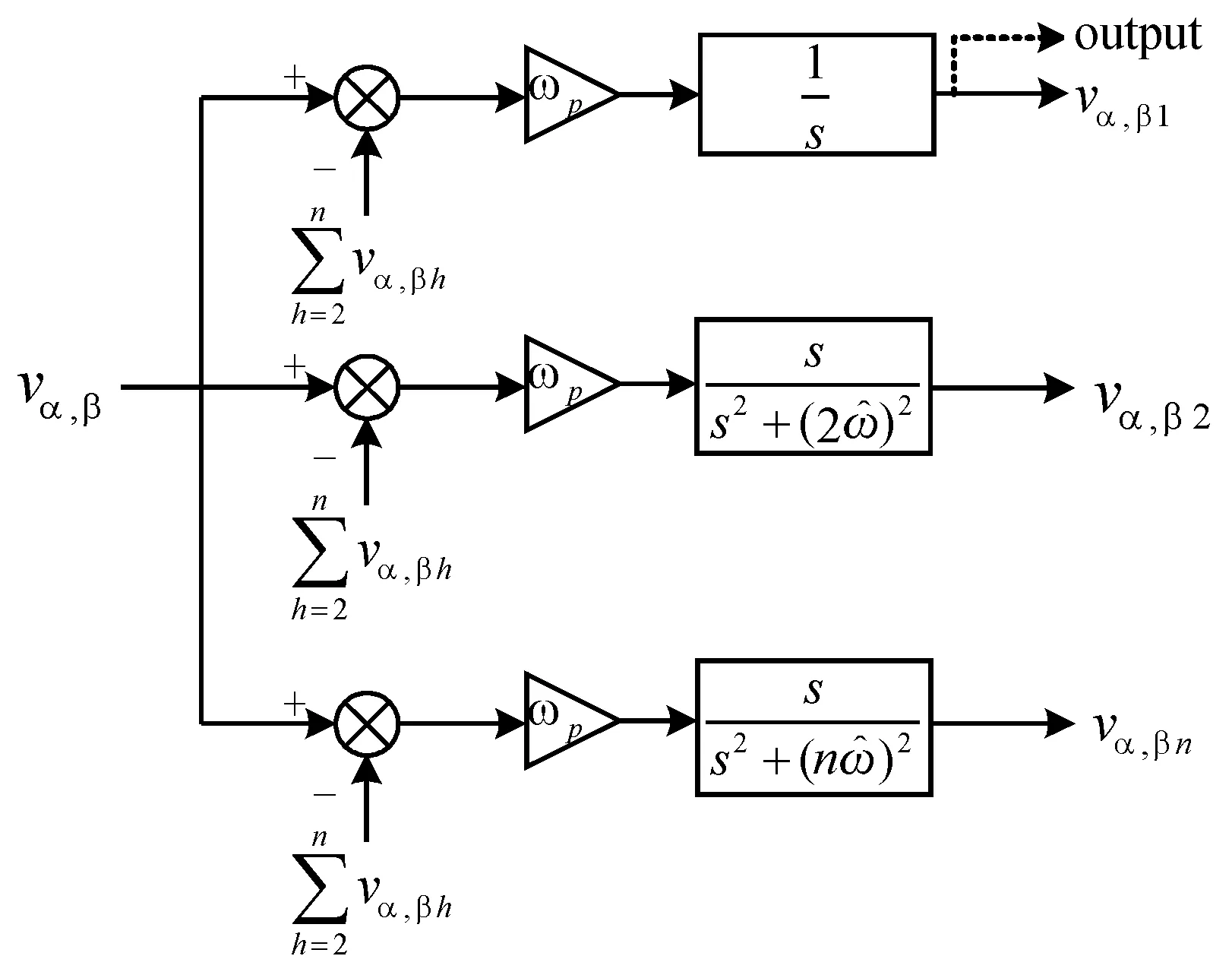
图4 自适应滤波器结构框图
反电动势信号vα,β在经过相应阶数的自适应滤波单元后,可得到剩余阶数的谐波信号:
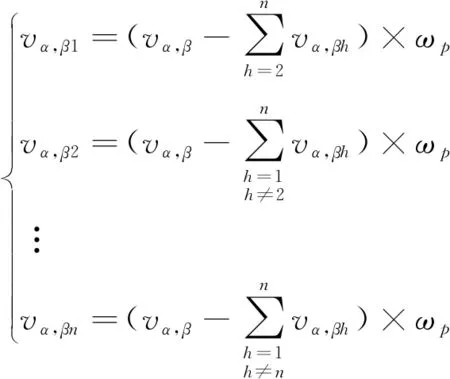
(10)
式中:ωp为自适应滤波的增益。
滤波单元的结构如图5所示。自适应滤波器的每个单元都可以作为一个独立的滤波器,负责从输入中选择性地提取谐波分量,所以自适应滤波器本质上是一个选择性滤波器。
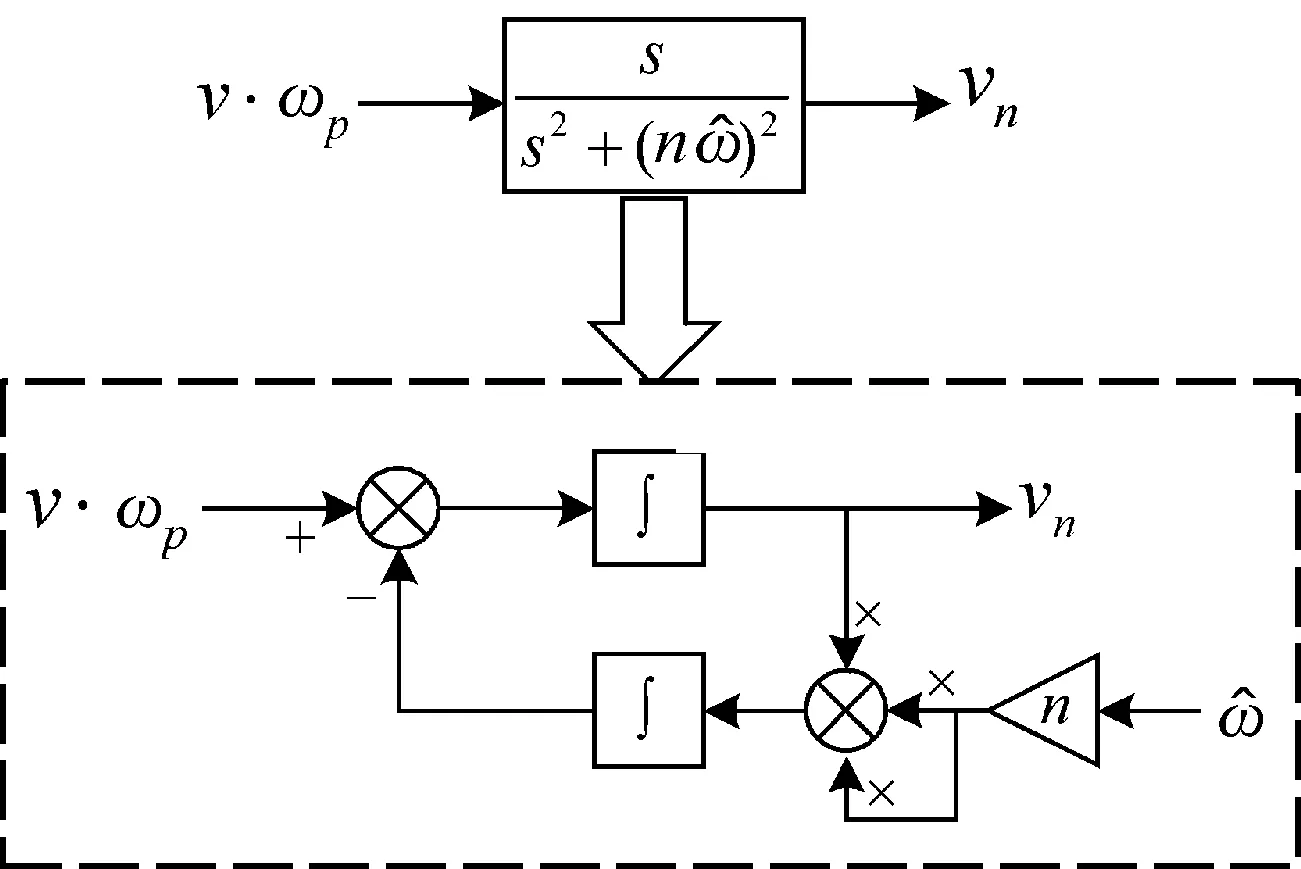
图5 自适应滤波单元结构示意图
通过这种并行排列的结构,自适应滤波器可以同时过滤掉次级反电动势信号中的各种谐波,最后输出基波分量vα,β1。
为验证自适应滤波器的可行性,在Matlab/Simulink中搭建有无自适应滤波器的次级反电动势信号的比较模型。如图6(a)和(b)所示,在不使用自适应滤波器时,反电动势信号会出现严重失真;在使用自适应滤波器后,反电动势信号是无失真的,更加贴近真实的正弦曲线。图6(c)和(d)分别为使用傅里叶变换分析滤波前后的反电动势,经过自适应滤波后,PMSM中反电势信号中的次级谐波项减少,证实了自适应滤波器可以增强PLL的谐波抑制能力,从而提高滑模观测器的速度和位置估计精度。
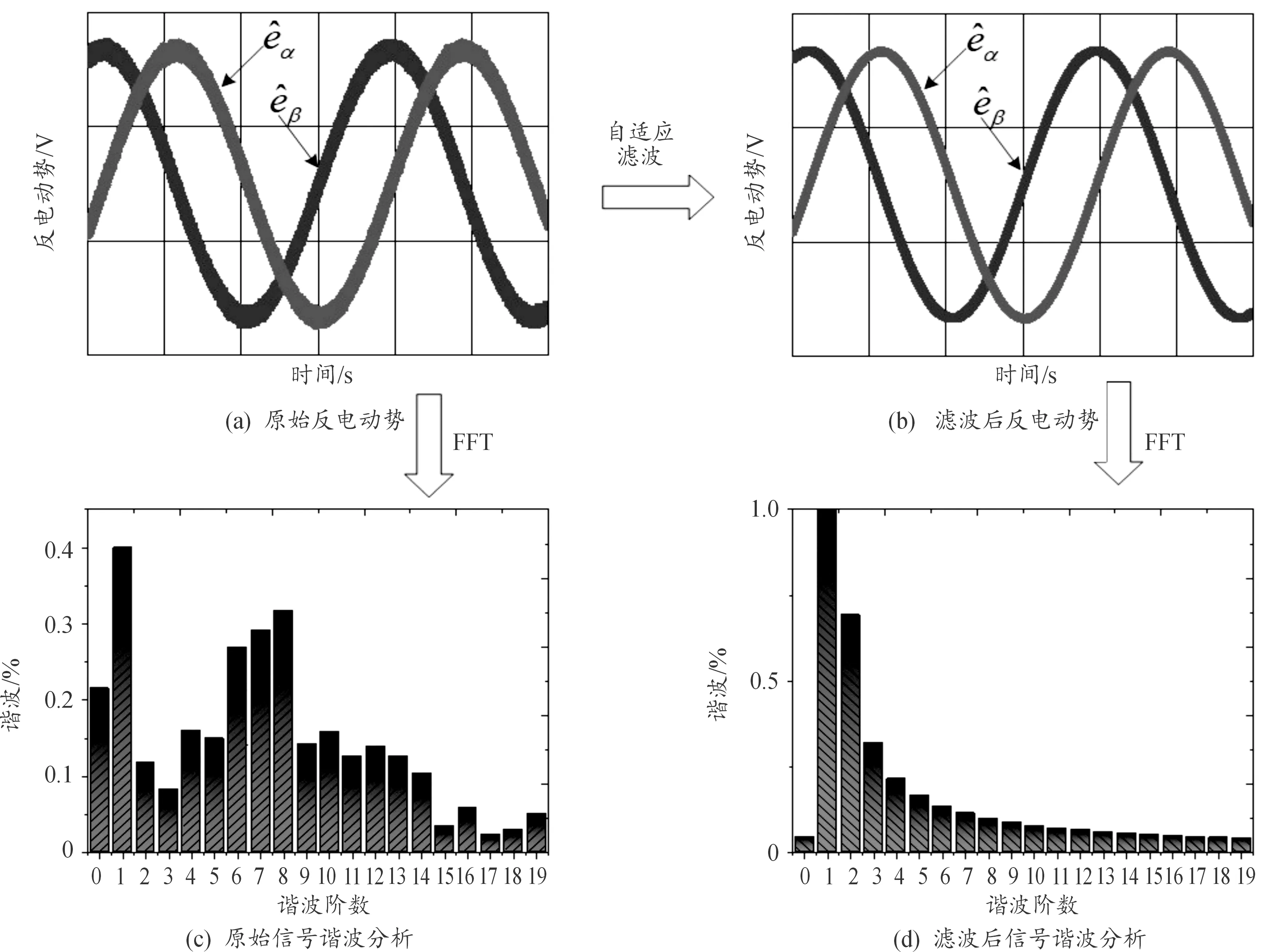
图6 自适应滤波前后的反电动势信号分析结果
3.2 幅值归一化算法
因为电机的反电动势信号在不同工况下幅值不同,且电机在运行时因温度升高引起电阻或电感等参数发生变化,由此导致的幅值不匹配问题也将对转子角度估计造成影响。为了解决这个问题,设计幅值归一化算法单元,如图7所示。
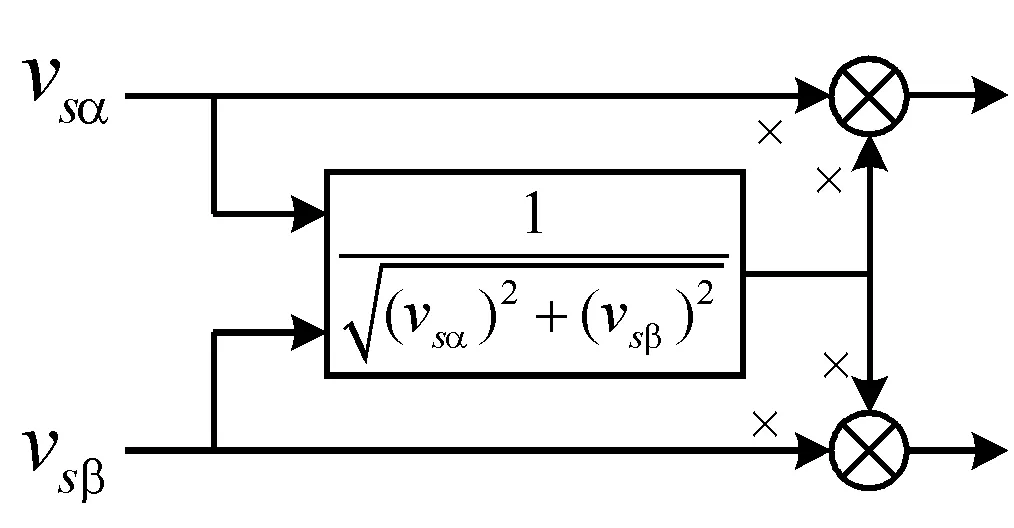
图7 归一化算法单元示意图
归一化算法使用量纲为一处理方法,使电机控制系统反电动势信号幅值的绝对值通过数学计算转化成某种相对值关系,以达到简化计算、缩小量值的目的。将经过自适应滤波器处理后的反电动势信号作归一化处理,得到的两项静止坐标系下α轴和β轴的幅值都是归一化幅值的相对值,使“幅值”失去了量纲。幅值归一化算法的实施不仅能降低系统复杂性和计算负担,而且消除了幅值失配的影响,提升了系统稳定性和动态响应速度。
3.3 改进算法的误差分析
最后得到的基于改进PLL的滑模观测器转子位置估计框图如图8所示。
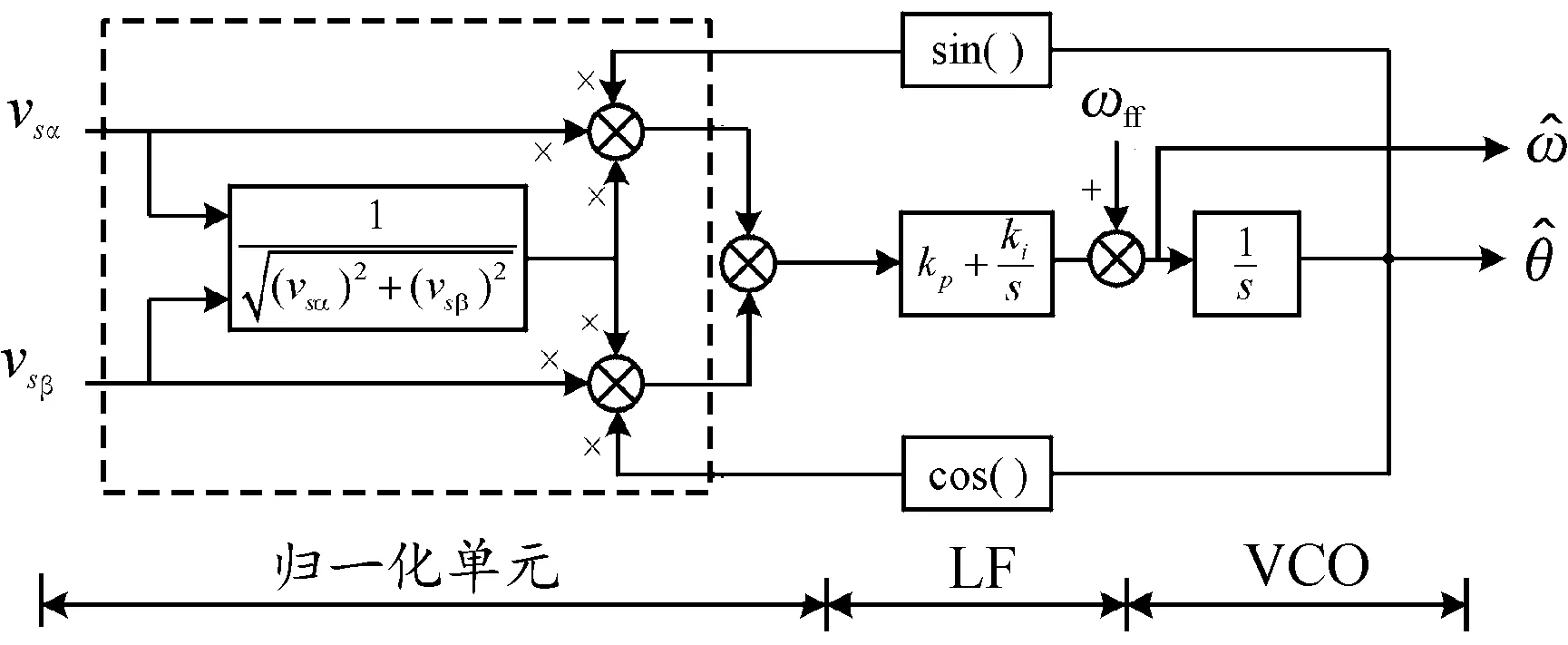
图8 改进PLL的算法框图

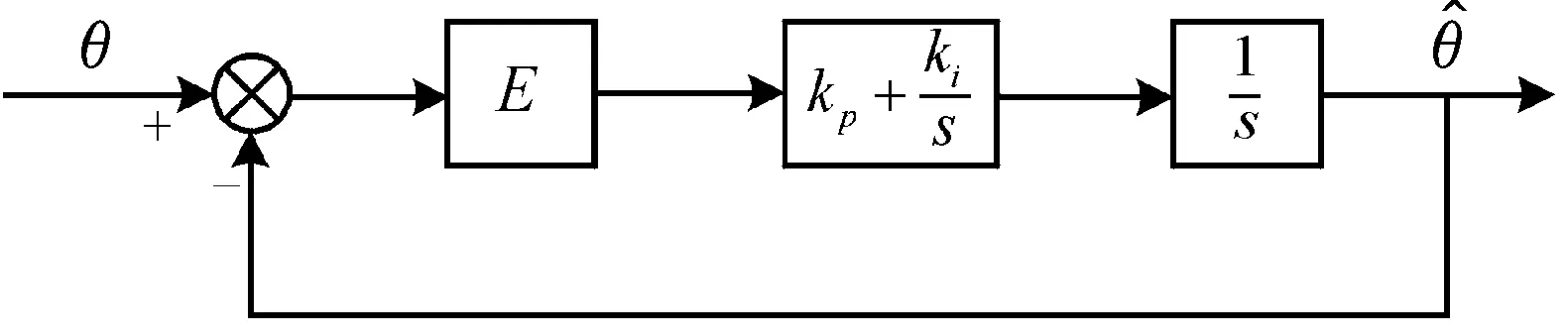
图9 改进PLL算法的等效框图
由图9可以得出PLL的传递函数为:
(11)
式中:kp为PLL的比例增益;ki为锁相环的积分增益。
由式(11)可知,误差传递函数为:
(12)
式中: ΔG(s)为相位误差传递函数。
实际情况中,PMSM控制系统的输入信号是一个随机信号,为评价系统的时域性能指标,需要研究系统在2种典型输入信号下的动态响应过程,包括相位阶跃输入信号和频率阶跃输入信号。其传递函数可表示为:

(13)
式中:θi1(s)、θi2(s)是2个输入信号的传递函数;m、n分别是相位阶跃和频率阶跃的增益。
当输入2种典型信号时,PLL的相位误差传递函数为:

(14)
式中:Δθe1(s)、Δθe2(s)分别为相位阶跃和频率阶跃输入信号下的相位误差传递函数。
将终值定理应用于式(14),得到不同输入下的稳态误差为:
(15)
式中:Δθess1(s)、Δθess2(s)分别为相位阶跃、频率阶跃输入信号下的稳态误差。
由式(15)可以得出,在系统输入为相位阶跃、频率阶跃信号时,基于改进PLL的滑模观测器PMSM无感控制系统的稳态误差为0,表明系统具有良好的控制精度和抗干扰能力。
4 仿真实验
为验证基于改进PLL的SMO算法的可行性,在Matlab/Simulink中搭建PMSM无传感器控制系统模型(图10)。仿真所用的PMSM参数如表1所示。
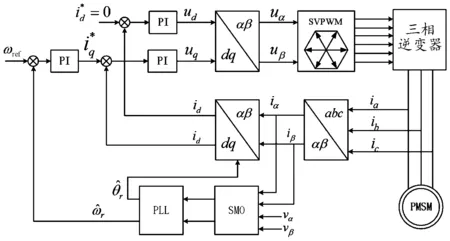
图10 无传感器FOC控制框图
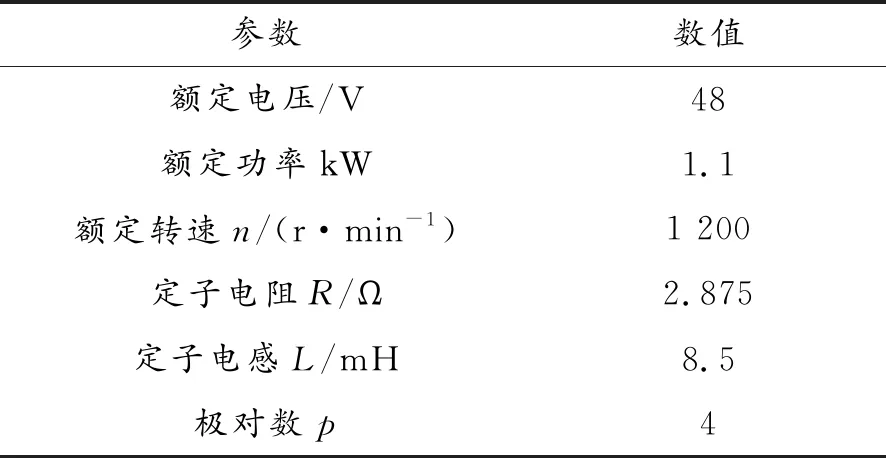
表1 PMSM的参数
设计2个实验方案:稳定工况下1 000 r/min时传统SMO算法与基于改进PLL算法的转子位置角和估计的误差实验;为验证PMSM控制的动态响应能力,输入转速信号从800 r/min突变到1 000 r/min时2种算法的实验。
4.1 稳定工况下转子位置估计实验
图11显示了1 000 r/min时估计的转子位置角和估计的误差。
由图11(a)和(c)可知,改进PLL算法的转子位置的估计曲线与传统SMO算法相比变得相对平滑且误差较小。对比图11(b)和(d)得出,使用传统SMO算法的最大位置估计误差曲线一直处于抖动状态,且最大估计误差超过0.5 rad,而使用改进PLL算法后误差曲线处于平滑状态,最大估计误差减小到0.1 rad。证实改进型PLL算法能够极大地提升传统SMO算法位置估计的准确性。
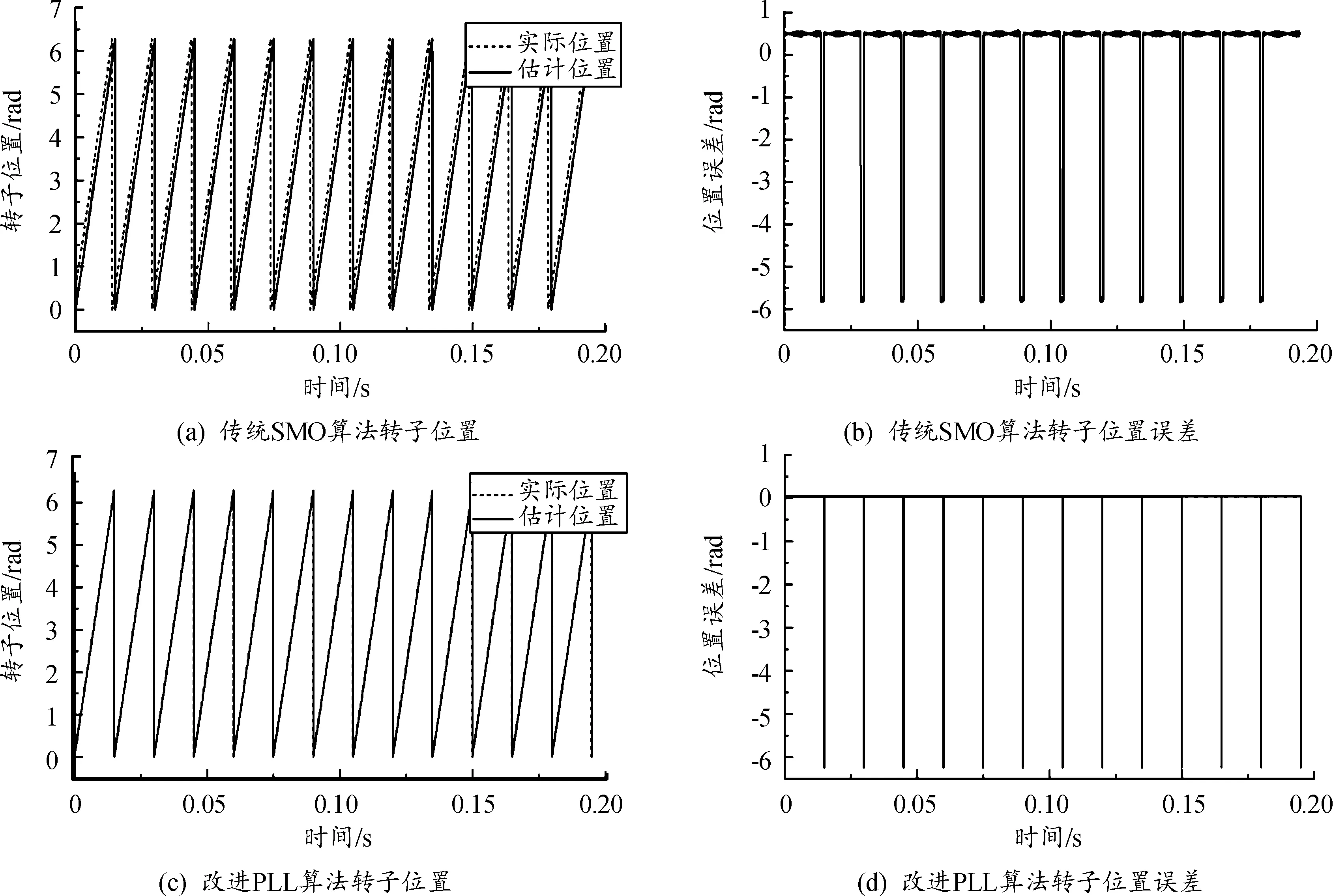
图11 1 000 r/min传统算法与改进PLL算法计算结果
4.2 阶跃信号下转子速度估计实验
图12为传统算法和改进PLL算法在800~1 000 r/min阶跃工况下的速度估算结果。
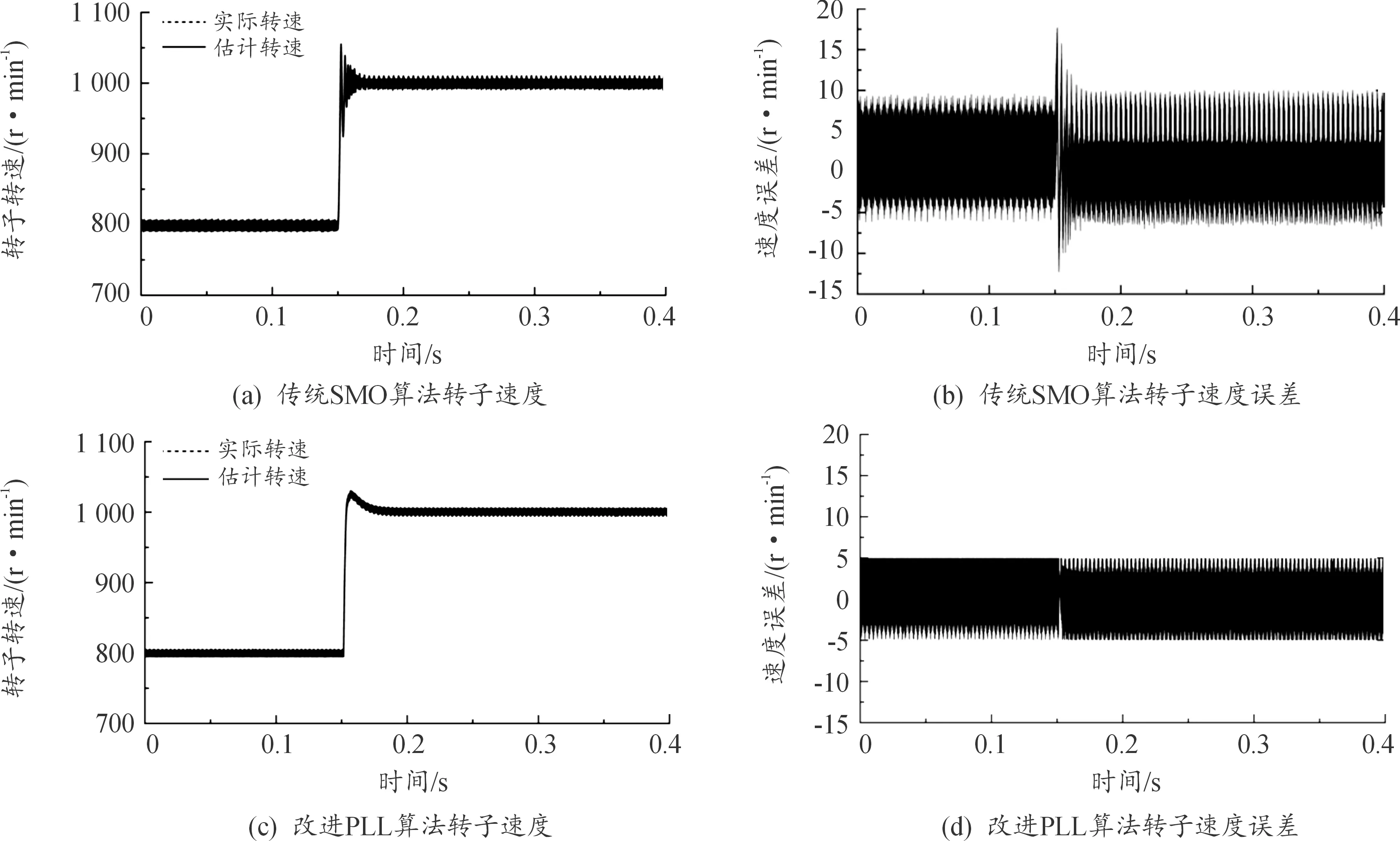
图12 800~1 000 r/min传统算法与改进PLL算法计算结果
如图12所示,2种算法都能准确跟踪转子的参考速度,但传统SMO算法的最大估计速度误差高达10 r/min。而改进算法估计转子速度的抖振减少,最大误差为5 r/min。即改进PLL算法比传统SMO估计具有更小的估计误差,因此可以保证估计转子速度的准确性。此外,改进PLL算法的控制系统在输入速度信号为阶跃信号时,上升时间较短,调节时间更短,超调量更小,说明系统动态响应速度更快。
5 结论
1) 改进算法设计中的自适应滤波器抑制了反电动势中次级谐波的干扰,使转子速度和位置估计误差分别减少到5 r/min、0.1rad。
2) 使用幅值归一化算法能降低因电机参数变化引起的幅值失配问题的影响,使系统的动态响应速度增加。
