区间2型T-S模糊系统的事件触发预测控制
2022-11-07周靖峰胡满峰
周靖峰,胡满峰
(江南大学理学院,江苏无锡 214000)
1 引言
网络控制系统(networked control systems,NCSs)是通过带宽有限的通信网络连接各种物理设备的控制系统.近年来,NCSs已广泛应用于各个领域,并引起了极大的关注[1-6].
为了节省通信资源并保持一定的系统性能,动态事件触发机制(event-triggered mechanism,ETM)被用来控制通信网络中信号的传输.在文献[7-9]中,使用了固定阈值的静态ETM,但是这并不能真正反映系统动态,从而导致一定的保守性.因此,期望能动态变化自适应调整阈值的触发法则来进一步降低信号传输的频率.遵循这个想法,通过引入内部动态变量,在文献[10-13]中设计了动态或自适应ETM.然而,一些动态ETM可能存在奇异问题并会退化为传统的时间触发机制,这可能会限制其在实际应用中的使用.最近,在文献[14-15]中,设计了有乘法和加法内部动态变量的ETM来避免奇异现象.在文献[16-17]中,提出了静态事件触发预测控制方法,其控制器通过引入预测器来获取系统的估计状态,这不仅节省了通信资源,而且有助于获得良好的系统控制性能.受上述工作的启发,设计一种动态事件触发的预测控制方案是有意义的.
T-S模糊模型可以用若干IF-Then规则下的局部线性子系统来表示具有非线性动力学的系统.考虑到采样的非均匀性,Wang等人[18]提出了一种T-S模糊马尔可夫跳变系统的模糊事件触发异步耗散控制方法.Ma等人[19]研究了一类具有全状态约束和执行器失效的随机非线性系统的自适应模糊输出反馈控制问题.但由于传感器和控制器通过通信网络传输信号,因此假设模糊系统和模糊控制器具有相同的前提变量是不实际的.因此,Asalm等人[20]提出了一类具有时变时滞和前提变量不匹配的非线性系统在ETM下的模糊控制器设计方法.但传统的T-S模糊系统在实际应用中存在着隶属度函数难以精确获得的问题.为了解决这一问题,通过对隶属函数进行有界化处理,文献[21]建立了IT2模糊模型.然而,在上述工作中,通信网络中的网络丢包问题一直没有得到很好的解决,这对本文的工作有很大的启发.
本文的目的是针对IT2模糊系统设计一种动态事件触发预测控制器,该控制器具有不同于模糊系统的前提变量并且能够补偿网络丢包带来的负面影响.首先,提出了一种新的IT2模糊系统模型,该模型包括能减轻通信网络负担的动态ETM和能解决网络丢包问题的预测控制器.然后,利用Lyapunov稳定性理论和前提不匹配方法得到了系统稳定的充分条件,并根据给定的充分条件得到了控制器增益和事件触发参数.本文主要贡献如下:
1) 提出了一种新的IT2模糊模型,该模型将动态ETM和预测控制方法相结合,以补偿网络丢包带来的负面影响.与传统的T-S模糊模型[22]不同,它不需要获得精确的隶属函数.
2) 针对网络化IT2 T-S模糊系统,提出了一种动态事件触发预测控制器的设计方法.与网络化并行分布式补偿方法[23]不同,不完全前提匹配方法可以不要求控制器具有与所研究的T-S模糊系统相同的前提变量.
本文的结构如下.第2部分是系统描述,其包括IT2 T-S模糊模型和动态ETM.第3部分分析了系统的稳定性,得到了系统稳定的充分条件.最后,通过数值仿真说明了设计方法的有效性.
注1在本文中,矩阵中的星号*用来表示对称项.X>0(X≥0)意思是X是对称的和正定的(半正定的).I和0分别表示单位矩阵和零矩阵.
2 系统描述
本文考虑的模糊事件触发预测控制结构图如图1.模糊事件触发预测控制方法包括传输采样数据的ETM1,基于ETM2的模糊事件触发预测控制器和存储预测数据包的网络数据丢失补偿器(networked data-dropout compensator,NDC).传感器与控制器通过通信网络连接,控制器与执行器直接点对点连接.
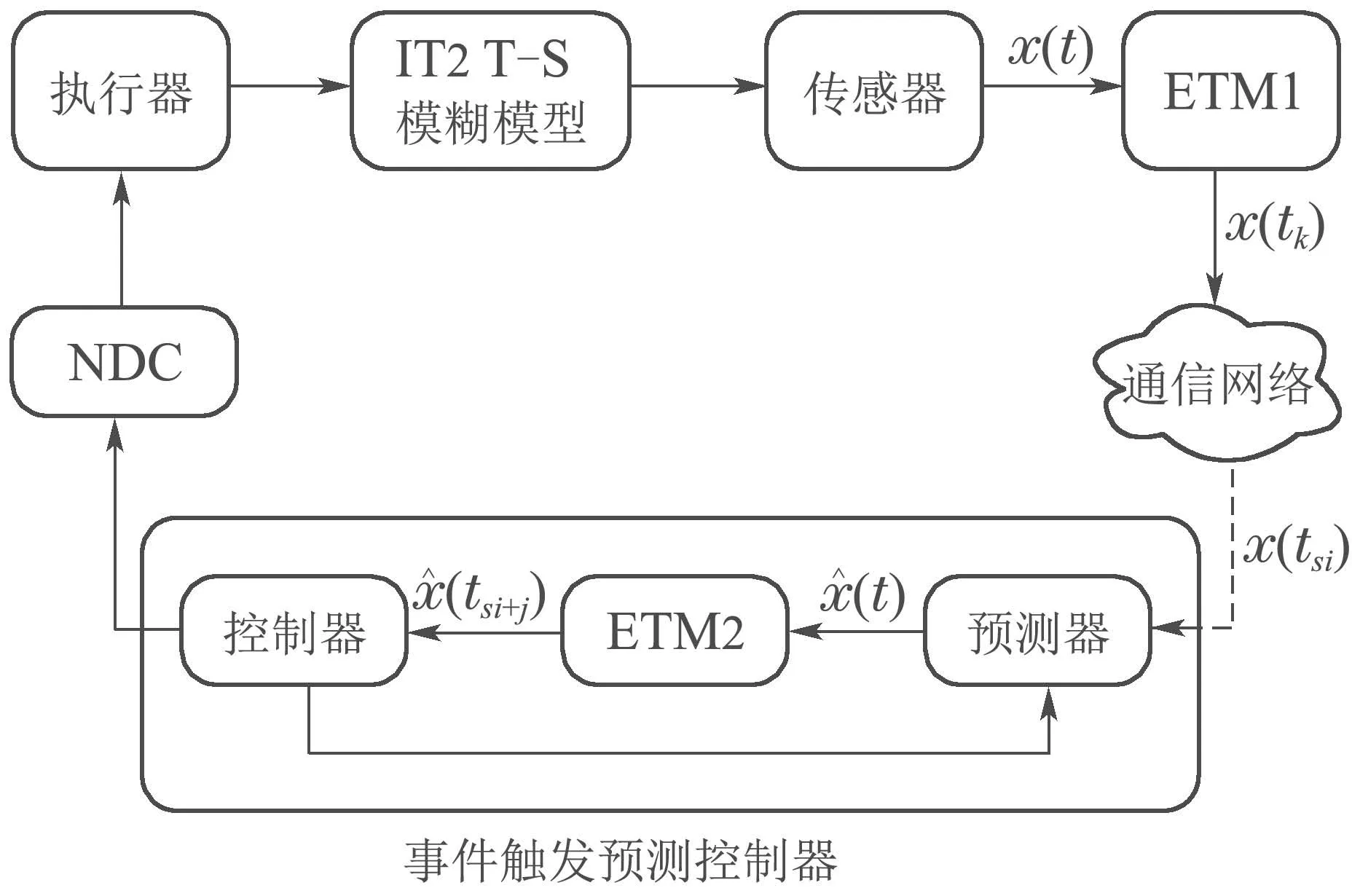
图1 IT2 T-S模糊系统框架Fig.1 The framework of IT2 T-S fuzzy system
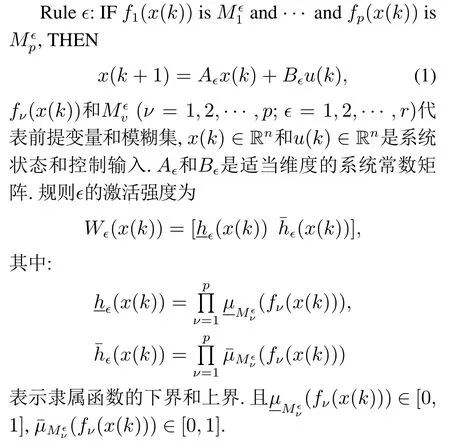
2.1 IT2 T-S模糊模型
考虑如下的网络化IT2 T-S模糊模型:
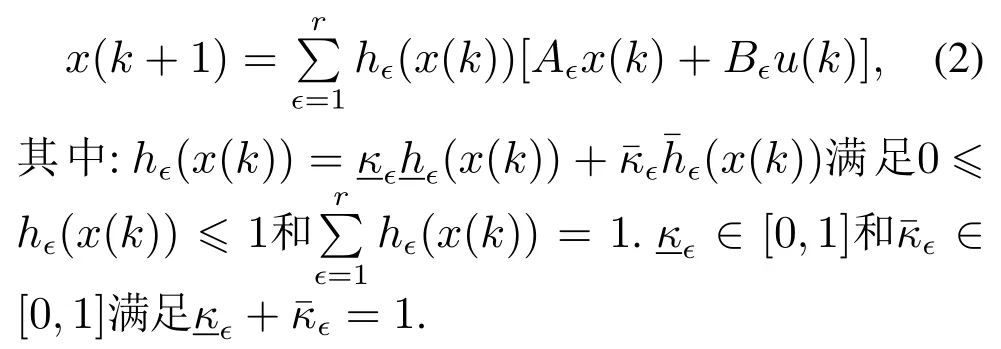
此时,系统(1)可以表示为
注2不同于传统的T-S模糊模型(例如文献[16]),IT2模糊模型的隶属函数在一个区间范围内,这意味着实际应用中不再要求获取精确的隶属函数.IT2模糊模型不仅扩展了传统的T-S模糊模型,而且有处理不确定性的特点.
2.2 动态ETM
为了节省有限的通信资源,设计了动态ETM1(见图1)来释放采样信号.假设e(k)=x(k)-x(kn)是当前状态x(k)和最新触发状态x(kn)之间的误差.然后,下一个事件触发时刻由如下ETM1确定:
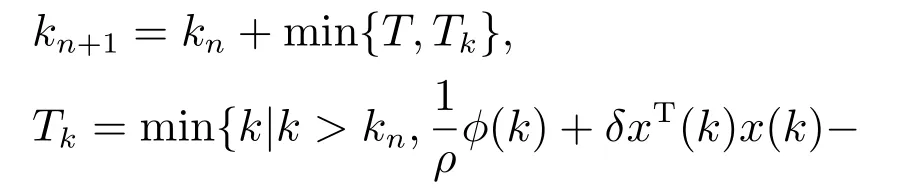

其中:0<δ <1和ρ >0是常数,T是正的常数,它表示事件触发间隔的上界.
内部动态变量φ(k)被设计为
注3动态ETM1包含一个内部动态变量φ(k),它可以根据系统状态动态的调整ETM1的强度.当φ(k)→0时,ETM1将变成静态ETM.在文献[14]中,ETM的内部动态变量是乘性的,而式(3)中的内部动态变量是加性的.一旦乘性动态变量退化到0,相应的动态ETM就退化为时间触发机制.当加性动态变量退化到0时,相应的动态ETM退化为静态ETM[16].
2.3 模糊事件触发控制器
由于网络资源的有限性和通信网络的不可靠性,一些采样数据不会传输到控制器,因此在控制器中设置了预测器.考虑到控制器模型不能与系统模型共享前提变量,因此模糊预测控制器模型描述为

注意到预测器和控制器的前提变量是相同的,但他们的前提变量和系统模型的前提变量是不同的.
2.4 T-S模糊模型
这一节,将仔细分析数据在网络中的传输过程并设计事件触发预测器.
假设(i=1,2,···)是ETM(3)成功触发的时间序列,那么闭环系统(1)可以被预测为

假设1在通信网络中,存在着网络丢包现象,且连续发生丢包现象的最大次数为σ.当网络丢包发生时,触发数据将不会被成功发送到控制器中,控制器将继续使用预测状态.
注4如果没有ETM(10),那么控制信号序列将表示为
基于以上分析,式(2)和式(7)可以分别表示为闭环系统
注5本文中的系统(2)和预测控制器(8)的前提变量是不完全匹配的,具体表示为hϵ/ηl.完全匹配可以看作本文中的一种特殊情况,这意味着本文中的设计方法更具一般性.
3 主要结果
本节中,将分析系统(16)在ETM(3)(10)下的稳定性准则.


那么闭环系统(16)在ETM(3)(10)下是渐近稳定的.
证选择Lyapunov函数

显然,存在一个标量ι >0对所有ξ/=0都满足ΔV(α(t),φ(t))≤-ι‖ξ2‖.因此,系统(16)是渐近稳定的. 证毕.
虽然定理1保证了闭环系统是渐近稳定的,但是为了能使用LMI寻求控制器增益和ETM的参数,有如下定理2.
那么闭环系统(16)在ETM(3)(10)下是渐近稳定的.其中


将D左乘和右乘在式(17)-(19)上,那么就能得到式(33)-(35). 证毕.
4 仿真实验
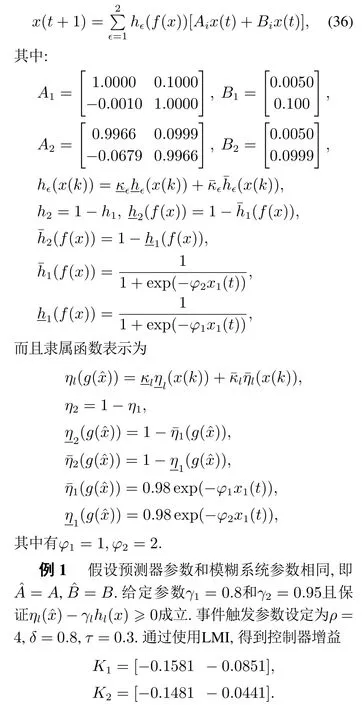
本部分通过数值模拟验证所设计的区间2型模糊系统的事件触发预测控制方案的有效性.给出一个非线性质量弹簧系统[16]
其中有ϱ1∈[-1,1].如果非线性质量弹簧系统以采样周期h=0.1 s离散化,则离散模糊系统为
假设系统初始状态为x0=[0.5-0.5]T,采样间隔为0.1 s,模拟时长为20 s.丢包在通信网络中随机发生且连续丢包的最大次数为σ=10.图2展示了系统状态的演化.图3展示了事件触发的时刻和间隔.图4动态变量φ(k)的演化.图5展示了网络丢包的发生时刻和间隔.
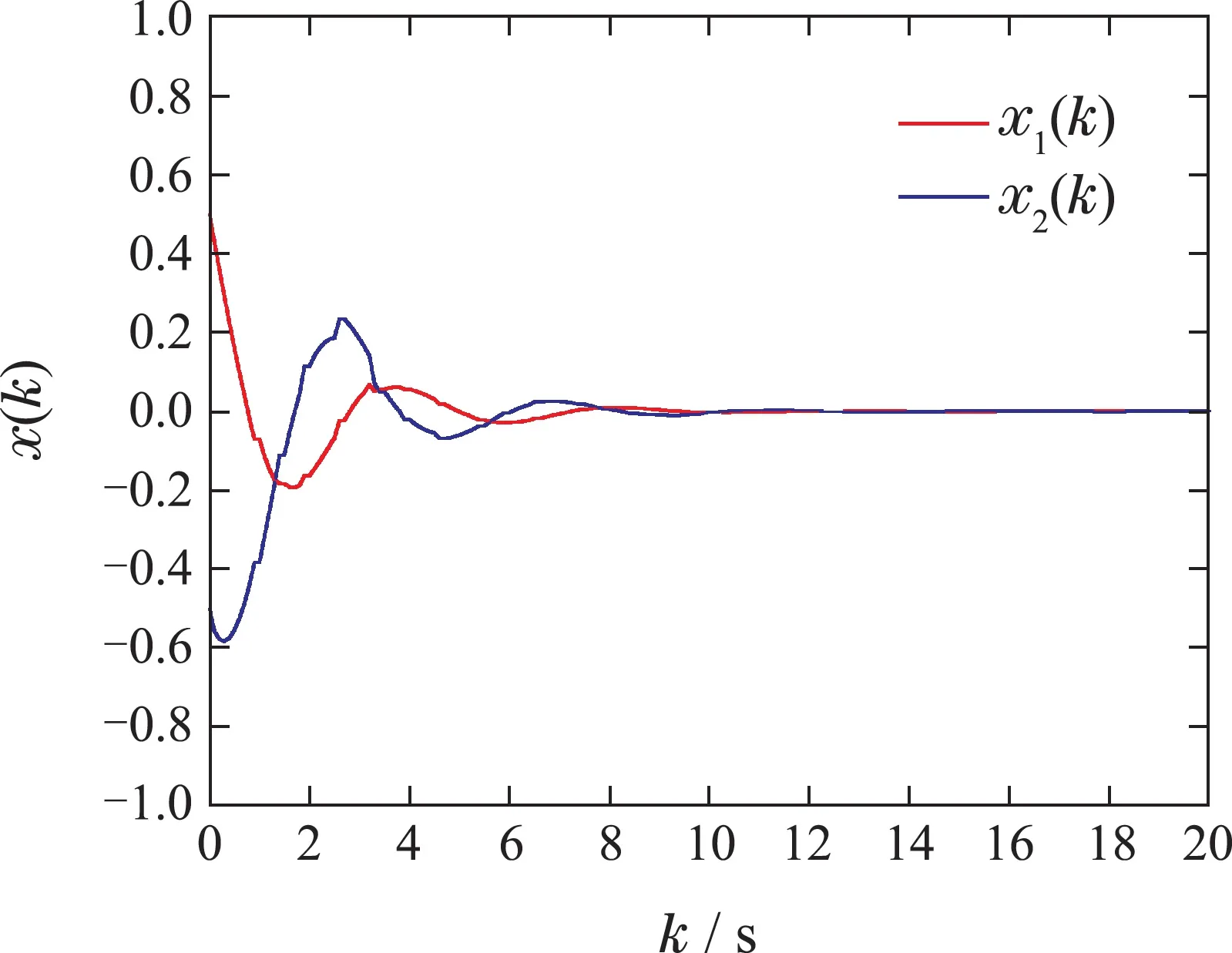
图2 例1中的系统状态Fig.2 The state of system in case 1
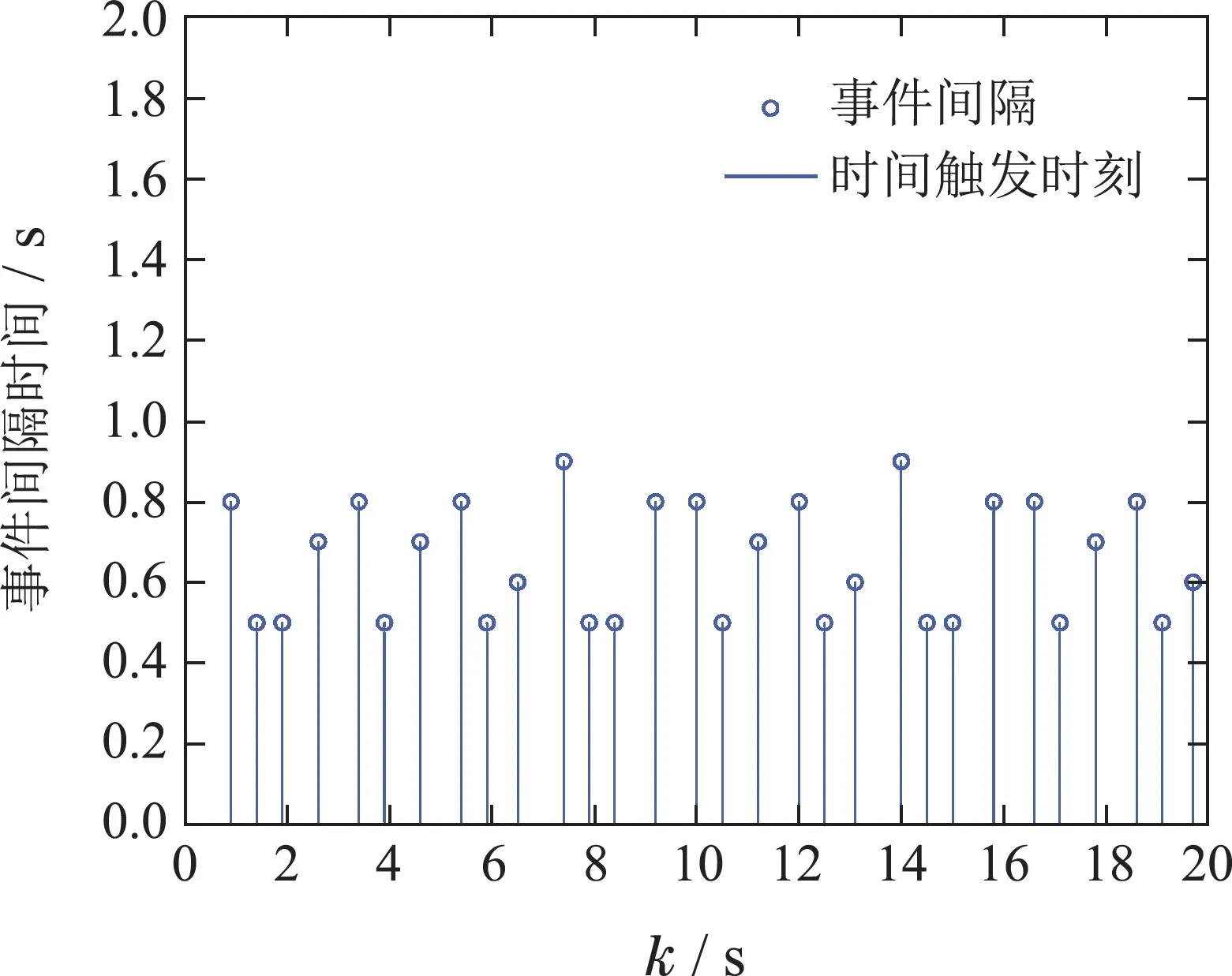
图3 例1中的事件触发时刻和间隔Fig.3 The instant and interval of even-triggered in case 1
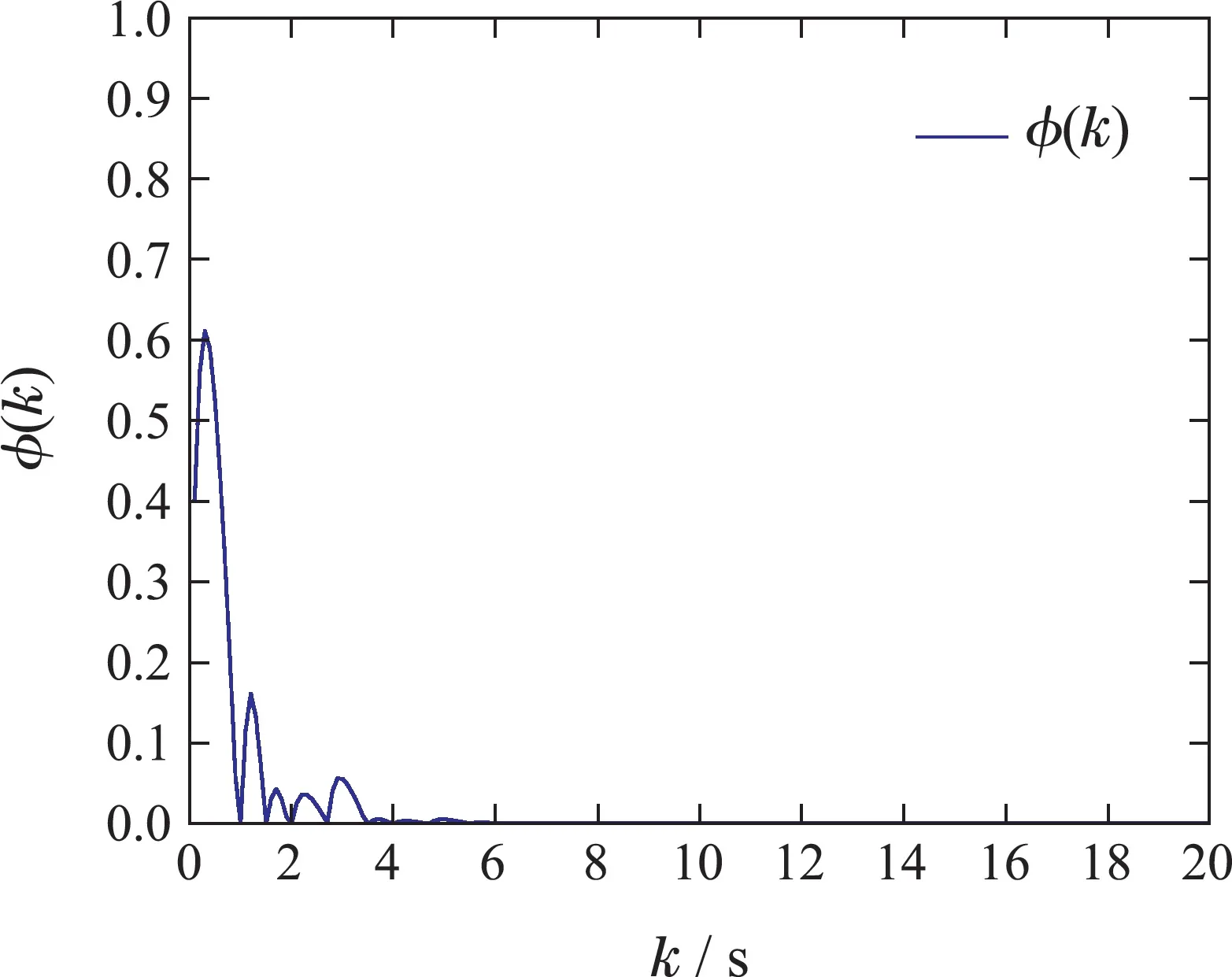
图4 例1中的φ(k)Fig.4 φ(k)in case 1
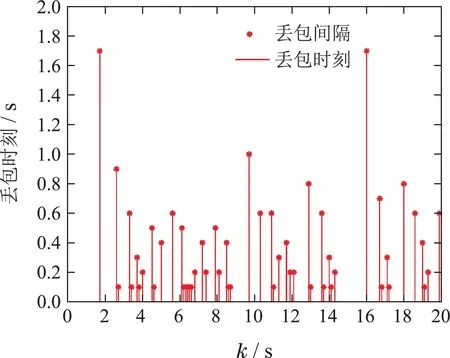
图5 例1中的丢包时刻和间隔Fig.5 The instant and interval of packet loss in case 1
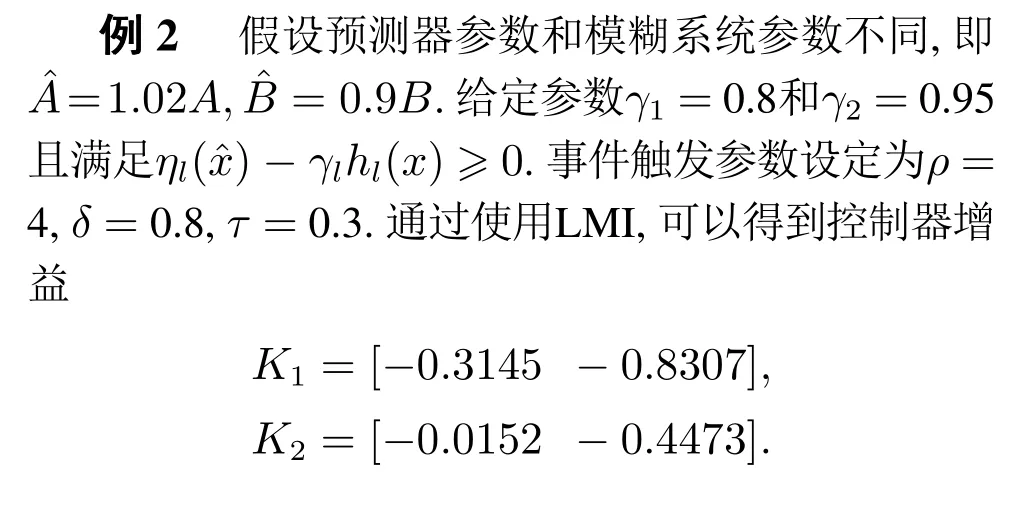
假设系统初始状态为x0=[0.5-0.5]T,采样间隔为0.1 s,模拟时长为20 s.丢包在通信网络中随机发生且连续丢包的最大次数为σ=10.图6展示了系统状态的演化.图7展示了事件触发的时刻和间隔.图8动态变量φ(k)的演化.图9展示了网络丢包的发生时刻和间隔.
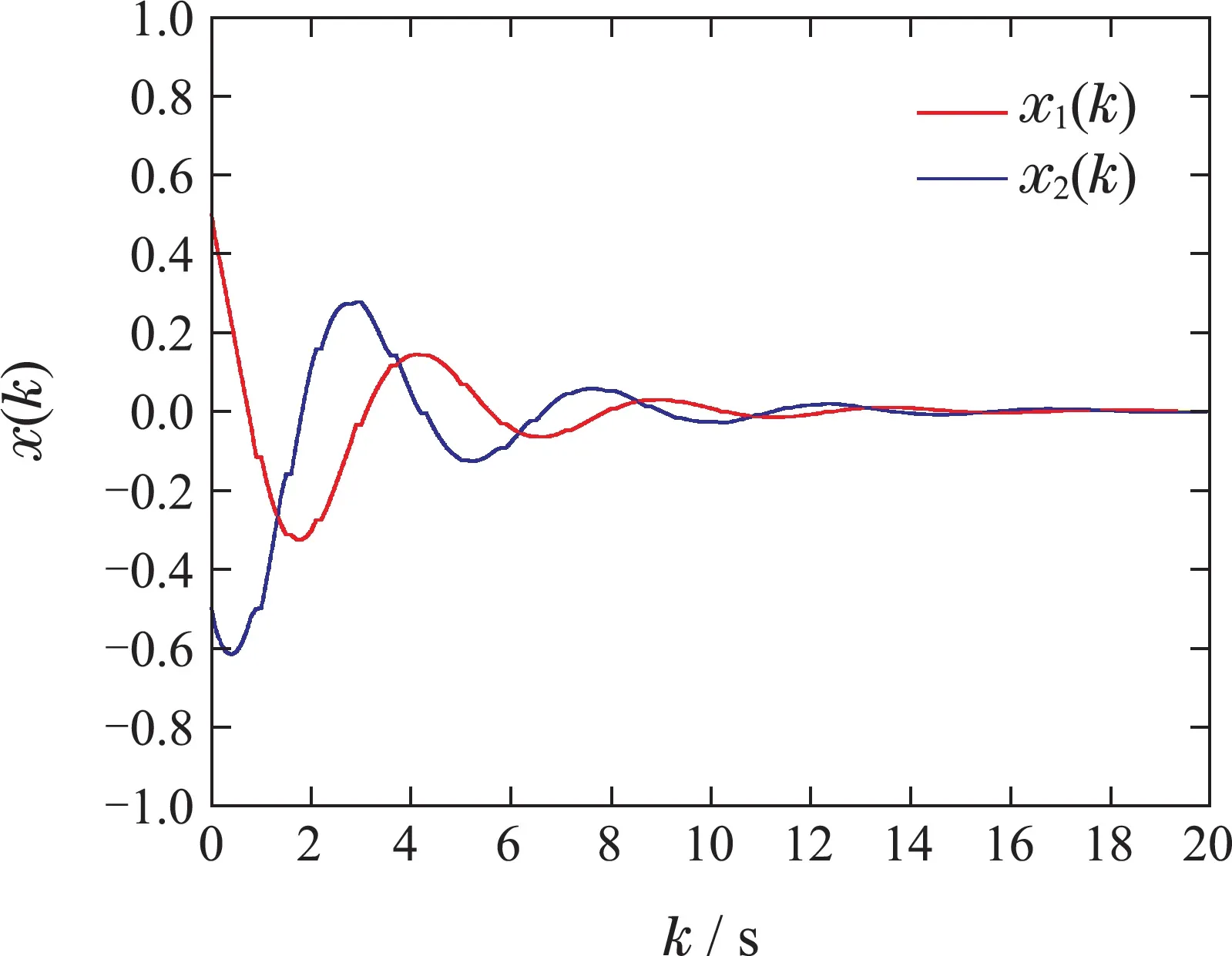
图6 例2中的系统状态Fig.6 The state of system in case 2
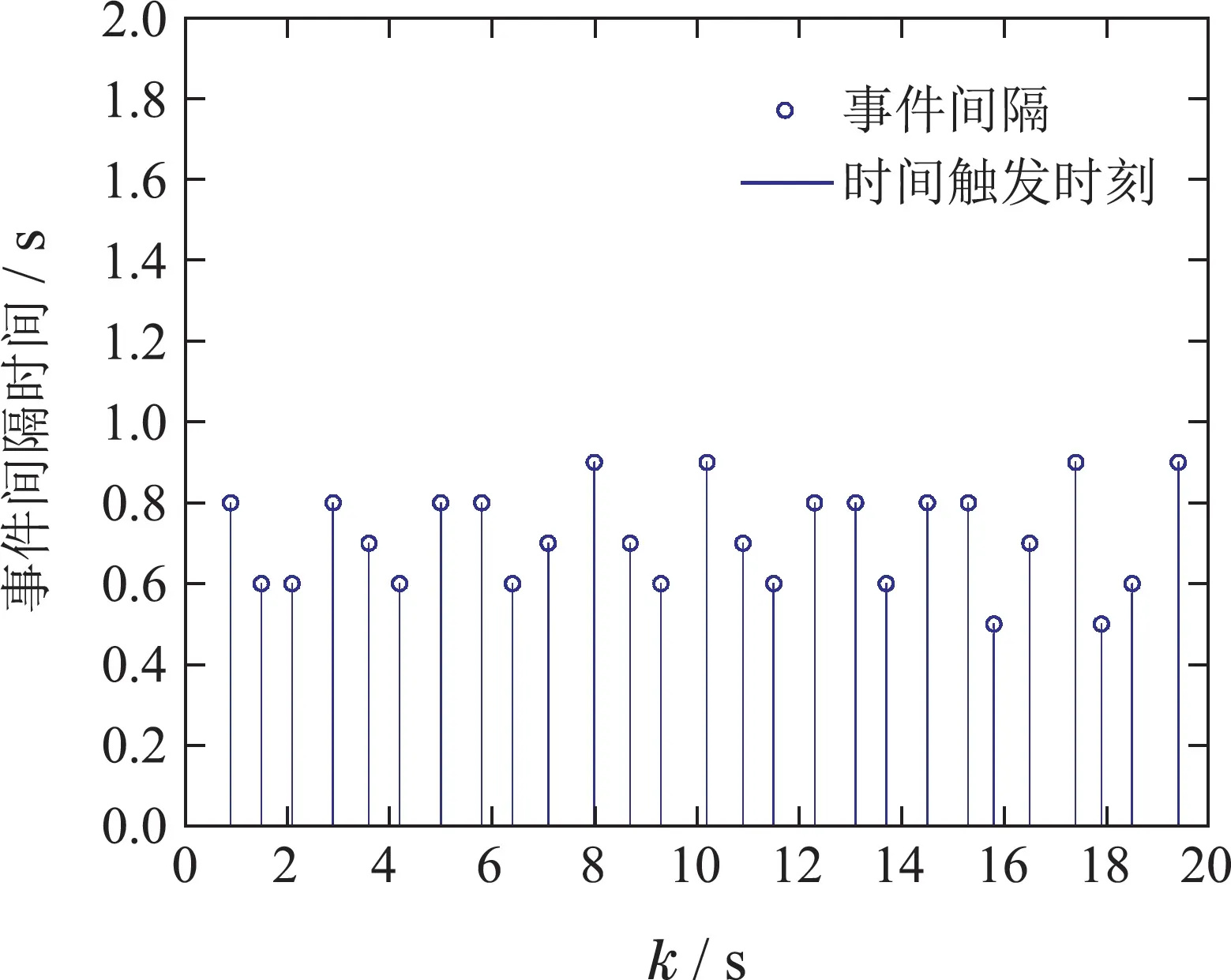
图7 例2中的事件触发时刻和间隔Fig.7 The instant and interval of even-triggered in case 2
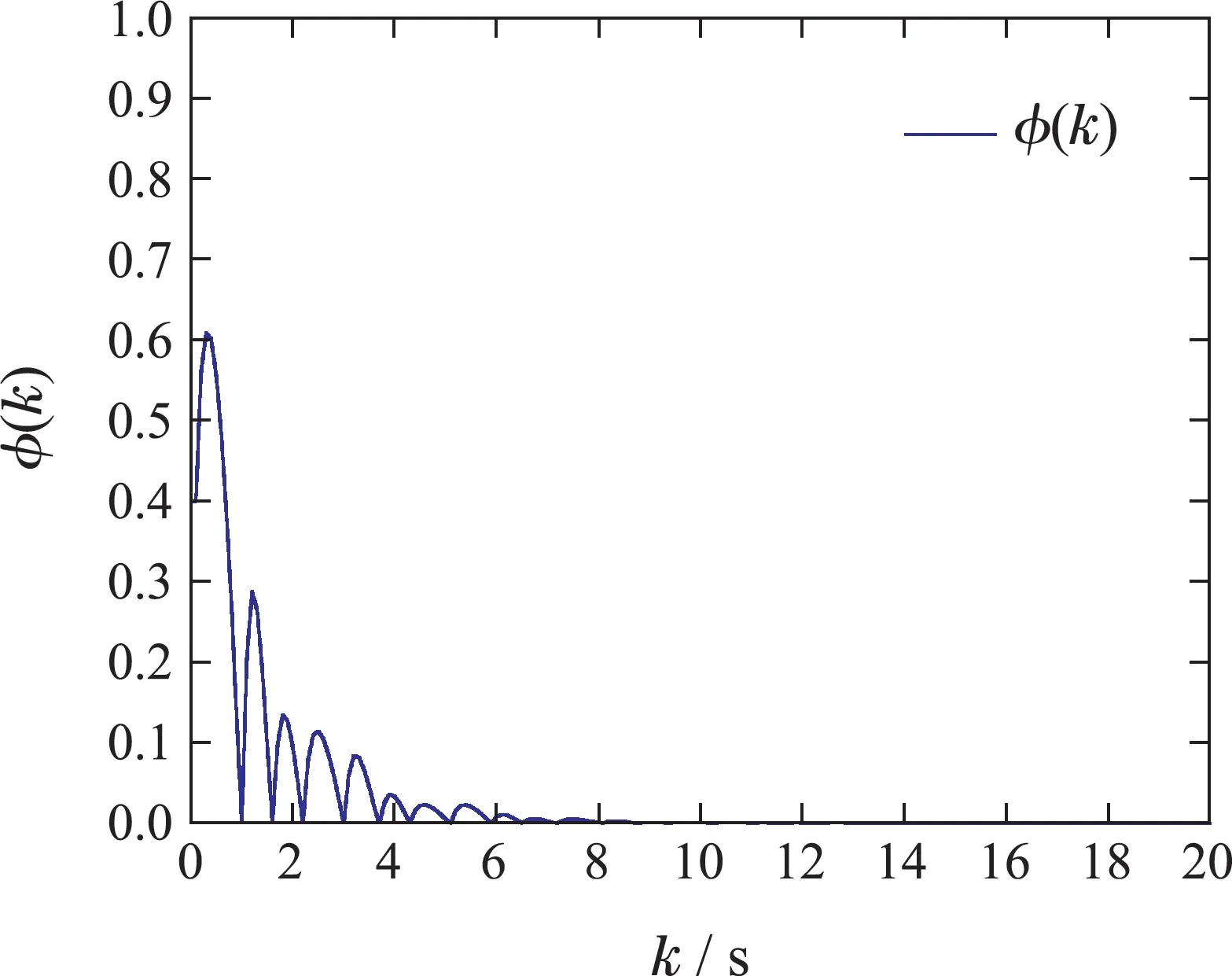
图8 例2中的参数φ(k)Fig.8 φ(k)in case 2
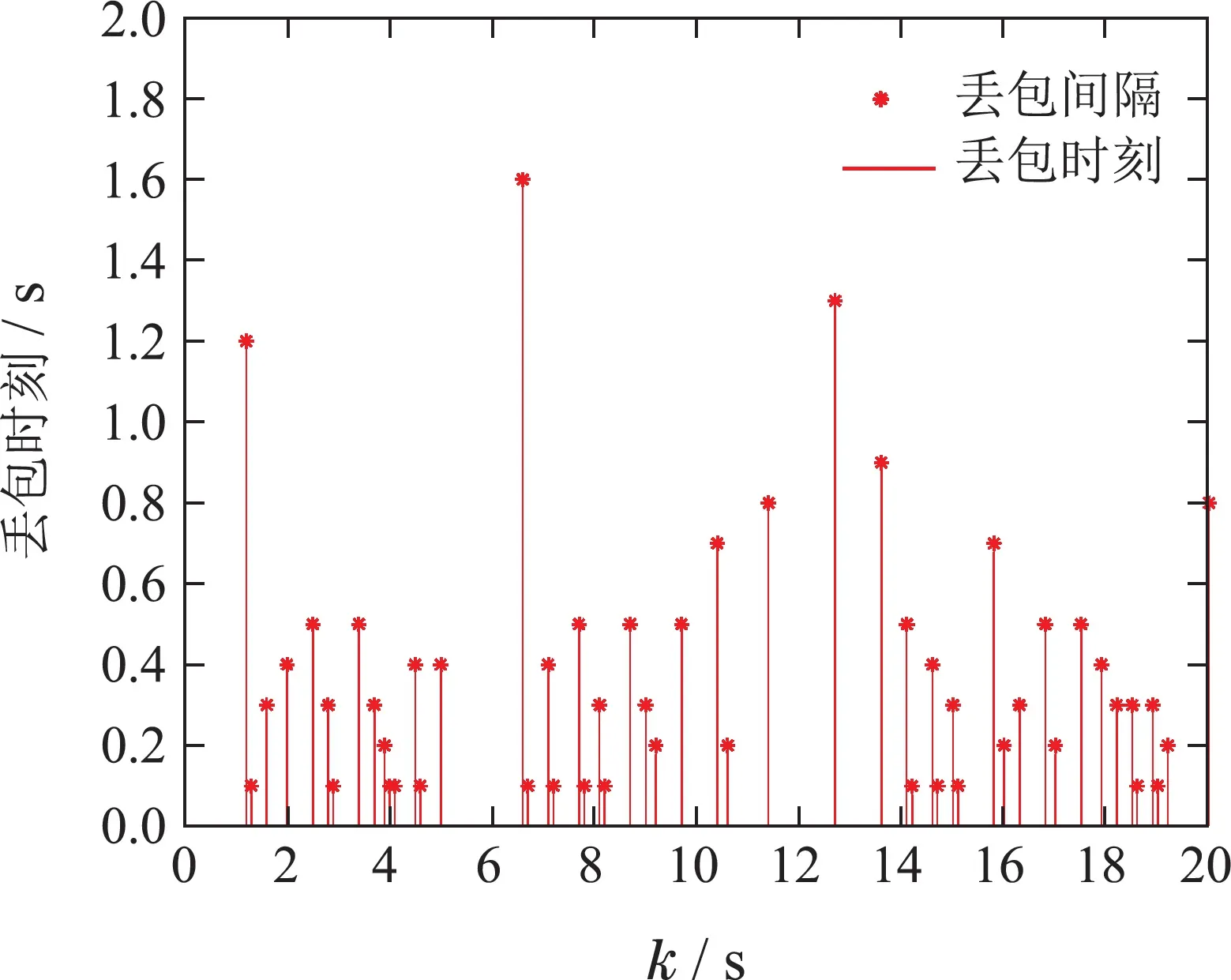
图9 例2中的丢包时刻和间隔Fig.9 The instant and interval of packet loss in case 2
因为网络丢包是随机发生,所以两种情况的ETM无法进行比较.所以,另外设定丢包状况相同的两个例子来进行仿真,并且跟静态ETM[16]进行比较,最终的结果在表1中展示.可以看到,动态ETM比静态ETM有更低的事件触发频率.
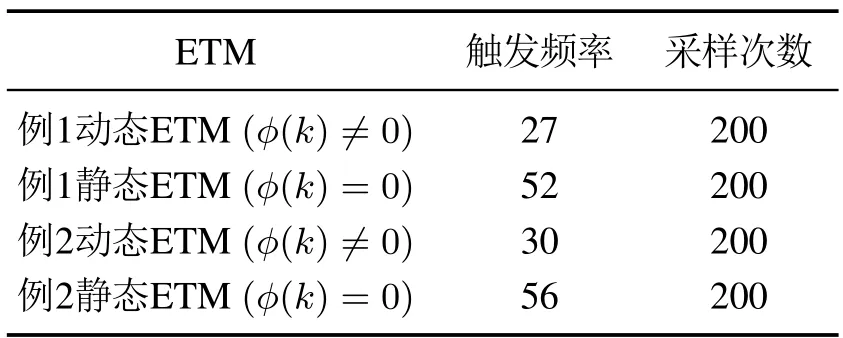
表1 事件触发频率Table 1 The frequency of event-triggered
5 总结
针对一类NCSs,本文采用IT2模糊模型进行建模,提出了一种前提不匹配的事件触发预测控制器的设计方法.动态ETM可以有效节约有限的通信资源并保持一定的控制性能,并且设计的事件触发预测控制器可以预测两次成功传输之间的系统状态.通过选择Lyapunov函数和一些不等式,可以得到一些充分条件来保证闭环系统是渐近稳定的,而且可以获得控制器的清晰表达.最后,通过数值模拟来说明设计方法的有效性.本文不考虑网络时延,未来的工作将研究具有网络诱导时延的NCSs的稳定性.此外,还有更多实际因素需要考虑,例如物理设备的故障以及网络信号的量化等.这些都是本文未来的研究方向.
