软体机械臂的驱动方式、建模与控制研究进展
2022-11-06刘志杰韩江涛
杨 妍,刘志杰,韩江涛,李 擎,贺 威
1) 北京科技大学智能科学与技术学院,北京 100083 2) 北京科技大学人工智能研究院,北京 100083 3) 北京科技大学自动化学院,北京 100083
传统刚性机械臂广泛应用于工业和制造业中,可以有效地执行特定任务.但是传统刚性机械臂在与环境交互时,存在着对环境适应性差,人机交互不安全等问题.本质上来说传统机器人主要由铝和钢等刚性材料制成,并且由于机器人的刚性连接和关节相对不灵活,因此在与人类或者是环境交互时存在一定的不安全性和局限性,难以应用于复杂的非结构化场景.近年来,工厂里搬取、分类货物,外科手术所用的手术刀,都开始采用机械臂的辅助.这些应用场景对机械臂的柔顺性以及安全性提出了更高的要求.
受大自然中生物器官的启发,许多的机器人通过模仿不同动物的特性被研制并成功应用,例如仿生软体机器人[1]和仿生扑翼飞行机器人[2]等.本文研究的软体机械臂,其设计灵感来源于象鼻[3-4]、章鱼手臂[5-7]的弯曲运动.研究者们通过使用不同的柔性材料[8],如树脂、硅胶等材料制造出具有柔韧性、可变刚度、多自由度的软体机械臂,使其具有更安全的人机交互性能.此外,软体机械臂的高度灵活性使其可以完成不同种类的任务,在工业应用中有巨大的经济潜力.
为了使软体机械臂实现多个自由度的运动,包括弯曲、伸缩、扭转等动作,除了需要柔软性延伸性较好的材料之外,驱动方式也十分重要.目前已有的驱动方式主要包括绳索驱动(Tendon 驱动)、形状记忆合金驱动(SMA 驱动)、气动驱动(Pneumatic 驱动)等.其中Tendon 驱动是将线索嵌入柔性材料制成的机械臂内部,通过改变线索的长度实现机械臂的变形;SMA 驱动主要是通过对软体机械臂中嵌入的SMA 加热产生的形变实现机械臂整体运动和变形;Pneumatic 驱动主要利用气体驱动机械臂内部腔体运动和变形.根据不同的驱动方式,需要建立相应的动力学模型并设计相应的控制策略.由于软体机械臂结构的复杂性,对软体机械臂运动学、动力学建模以及控制研究带来极大的挑战.本文将根据软体机械臂驱动方式以及相应的建模方式和控制方法研究现状展开讨论,并对软体机械臂的发展趋势进行总结展望.
1 概述
软体机械臂是一类具有连续几何特性的新型机械臂,与刚性机械臂相比,软体机械臂主要由柔软的材料制成(如硅胶、流体、软胶等),不仅拥有更高的灵活性、柔顺性以及安全性等优势,而且有良好的共融能力,在很多领域具有广阔的应用潜力,如医疗、野外救险、工业抓持等[9-13].目前,越来越多的研究者投身于软体机械臂的平台的开发、建模、控制等研究中[14-16].但软体机械臂发展的同时也面临着诸多困难和挑战,软体机械臂是集材料学、仿生学、机器人学、控制科学等多种交叉学科技术为一身的复合应用,这也决定了它不能靠单一学科的发展而获得较大的进展.从材料学和机械学角度来讲,“软”是软体机械臂的本质属性,柔软的材料是制作软体机械臂的关键,在材料方面,科学家用杨氏模量来界定刚性材料和软性材料,即高于109Pa 的为刚性材料(例如金属或硬塑料),低于109Pa 的为软性材料(例如皮肤,肌肉组织等),如何获得更优的材料和更新的仿生结构,这对材料学和机械学提出了要求,也对3D 打印技术提出了更高的要求,如何高效快速地加工出符合特定需求的本体结构也是一个难题.从控制角度看,高度的柔软性使传统的编码器、电位计和刚性的力触觉传感器等很难集成到软体机械臂中,而无限的自由度和具有大变形非线性特性使得软体机械臂的运动学和动力学模型的建立非常困难,进而带来控制设计的诸多挑战,急需发展新的控制理论和建模方法.本文以驱动方式为切入点,针对主流的三种驱动方式进行建模和控制方面的介绍,对软体机械臂的研究现状和未来的发展趋势做出展望.
2 软体机械臂的驱动方式
驱动方法决定了软体机械臂完成预期动作的方式.例如抓握,或者沿特定轨迹移动等动作都需要特定的驱动方式[17].对于刚性机械臂,通常使用伺服电机或步进电机驱动液压缸或者气压缸[18-20],将机械手从某一位置驱动到目标位置.对于软体机械臂,为了让其有更强的适应能力和人机交互的安全性,要求它的组成元件必须能够实现较强的伸缩、弯曲和扭转等变形,这使得刚性机械臂的连杆驱动的方式不能适用.如何驱动由柔性材料制成的软体机械臂是研究的核心内容.国内外的学者在这一方面做了很多创新型的内容[21-23]:包括通过传输介质对本体进行驱动(例如哈佛研究的气动软体机器人[23-27]);直接利用可变性的智能材料柔性驱动器进行驱动(例如SMA 驱动[28-34]);直接在本体内利用化学反应产生动力驱动(例如内燃驱动[35-36])等.针对软体机械臂的实际功能,目前主流的驱动软体机械臂的驱动方式可分为三大类:(1)绳索驱动;(2)形状记忆合金驱动;(3)气动驱动[37-41].下面将分类进行介绍.
2.1 绳索驱动(Tendon 驱动)
绳索驱动方式是将拉线内嵌于机械臂柔性材料内部,通过改变拉线长度驱动机械臂运动.绳索驱动可以进行长距离的传动,它的形状任意,既可以适用于刚性结构,又可以适用于柔性结构,适合软体机械臂的驱动.绳索驱动在早期被广泛采用于软体机械臂的研发和建模、控制的验证.
意大利圣安娜大学Renda 等[42]研究了章鱼触手运动特性,以章鱼手臂为灵感,设计了一个具有多重弯曲功能的软体机械臂工作原型,对该模型进行了实验验证,取得了满意的结果.实验验证了章鱼最具特征的动作:弯曲、伸展和抓取(图1).该模型可作为设计阶段的动态仿真平台,用于设计连续介质机械臂在稠密介质中运动的控制策略.

图1 仿章鱼机械臂实验验证原型[42]Fig.1 Experimental validation prototype of an octopus-like robotic arm[42]
田纳西大学诺克斯维尔分校Oliver-Butler 等[43],设计了一种绳索驱动软体机械臂.研究者分别使用平行的线绳以及交汇于一个顶点的线绳驱动机械臂进行弯曲运动,并且对于两种不同形式的绳索驱动机械臂进行测试:(1)机械臂弯曲角度为90°,线绳的位移大小(图2 (a));(2)线绳位移相同并且尖端0.9 N 负载情况下,机械臂的弯曲程度大小(图2(b)).研究者证明了不同的拉线形式对于机械臂的运动会产生较大影响.
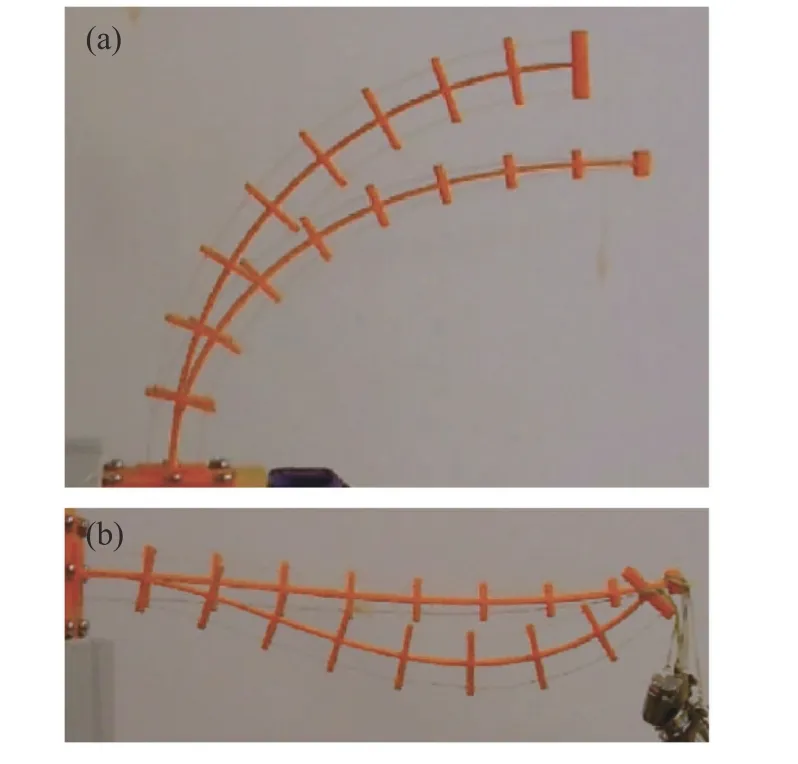
图2 田纳西大学诺克斯维尔分校软体机械臂[43].(a) 机械臂90°弯曲;(b) 机械臂尖端0.9 N 负载Fig.2 Tendon-driven robotic arm by the University of Tennessee,Knoxville[43]: (a) 90° bending of the manipulator;(b) 0.9 N load at the tip of the robotic arm
从上述分析中可以看出绳索驱动的使用和制造更加的灵活,可以根据不同场景针对不同的功能设计不同的拉线数目和排列方式,从而使软体机械臂获得不同的运动方式,进而完成各类功能.绳索驱动软体机械臂因为由电机带动线直接操作,所以响应时间短,反应迅速.但是相对于其他驱动方式,绳索驱动由于其需要在特定的狭小空间内穿梭,会不可避免的带来传动效率的损失,而且由于离不开电机的驱动所以其整体造型笨重,灵活性差.
2.2 形状记忆合金驱动(SMA 驱动)
SMA 是一种具有形状记忆合金效应的智能材料,可以在一定条件下改变自身形状和机械性能.SMA 通常制作成丝状或薄片状以便于嵌于硅胶等软体材料内部.通过对SMA 通电加热可产生应力和应变,从而对材料进行驱动.其变形的机理为:当SMA 处于冷却状态时,它将从高温奥氏体变为低温马氏体,从而发生形变;当处于加热状态时,它又能消除低温时的形变,恢复原状.整个变形的过程即可对柔性材料产生变形和位移.圣安娜大学研究人员模仿章鱼的运动[44-46],采用SMA 驱动方式设计了软体机械臂原型,实现弯曲、伸长、缩短等运动.
俄亥俄州立大学和清华大学合作[47],研究了一种采用SMA 的驱动器(图3).建立了SMA 驱动器的分析模型和设计模型,对输出性能进行了预测,并通过实验验证了模型的准确性.进一步将该驱动器应用到具有五个手指的柔软机器人手.实验结果表明,柔性机械手的捏力为3 N,抓取力为9.7 N.柔软的机械手由于其质量轻(约250 g)、刚度低以及能够承受大的外部冲击,对于人类操作者来说具有更高的安全性.该驱动器在仿生软机器人和软机器人修复中也有潜在的应用价值.

图3 软体机械臂不同形态[47].(a) 笔直形;(b) s 形;(c)螺旋形;(d)圆形Fig.3 Different forms of flexible robotic arms[47]: (a) straight;(b) sshaped;(c) spiral;(d) round
广州大学吴羽设计了一种SMA 驱动的软爪[48](图4),研究者将SMA 弹簧嵌入硅胶外壳内部.研究通过调节PWM 波占空比,改变经过SMA 的电流强度和电流时间,使得SMA 发生形变,从而驱动机械臂运动.研究者分别测试了在有负载的情况下机械臂的响应速度、形变稳定程度以及反向弯曲速度等性能参数.

图4 广州大学SMA 驱动软体机械臂原型[48]Fig.4 SMA-driven robotic arm prototype by Guangzhou University[48]
从上述分析中可以看出,不同于绳索驱动的响应迅速,由于SMA 本身变形机理的限制,它的变形时间相对较长,变化缓慢.但SMA 可完全嵌入材料内部,不需要电机等传动设备,未来可以实现一体化设计,应用前景更加的广阔.
2.3 气动驱动(Pneumatic 驱动)
气动软体驱动器的结构设计形式虽然多种多样,但是其工作原理都基本类似.气动软体驱动器的工作原理本质上是以气体为工作介质,弹性腔体在工作气压(正压或者负压)和结构约束的作用下在某一空间维度(如轴向、弯曲、扭转等)产生的定向膨胀或收缩.弹性腔体可以是可拉伸性能较好的弹性材料,或者是不可伸展但可容易弯曲折叠的薄壳或者薄膜结构,如基于褶皱薄膜/折纸薄壳结构的软体气动驱动器.从运动形式上看,气动软体驱动器则主要可以分为轴向收缩/伸长,弯曲/摆动,扭转/回转,螺旋/缠绕型等.气压驱动软体机械臂动力来源为压缩空气,其结构简单、质量轻、成本低,因此许多软体机械臂原型采用了气动驱动形式[49-52].
比萨圣安娜高等学校Yasmin Ansari 研究小组基于气动驱动建立了一种可以伸长和弯曲的软体机械臂[53].该机械臂的功能是帮助行动不便的老年人洗澡.其活动空间范围较大,内部包含的水管可以将水覆盖坐姿人体的全身(图5(a)).在使用时通过一套视觉伺服系统完成闭环控制实现空间内的精确定位(图5(b)).

图5 圣安娜大学人体辅助气动机械臂[53].(a)机械臂活动空间范围;(b)视觉伺服测试系统Fig.5 Human-assisted pneumatic arm by Sainte-Anne University[53]: (a) range of arm movement space;(b) visual servo test system
比萨圣安娜高等学校Iris De Falco 研究小组设计了一种应用于外科手术的气动软体机械臂[54],可以实现伸长、弯曲以及刚度变化.该机械臂由三个相同气动模块以及一个操作抓手组成(图6).气动模块外部为硅胶,内部由真空充气管、气动腔室以及阻塞装置构成.外部空气阀连接的充气管可以向腔室内充气,气动腔室发生形变后驱动机械臂运动,阻塞装置可以改变机械臂的刚度,便于进行手术作业.研究者使用位置跟踪系统验证了机械臂在空间中的活动能力以及抓取能力(图7).

图6 圣安娜高等学校手术辅助软体机械臂原型[54]Fig.6 Surgical-assisted pneumatic arm by Sainte-Anne University[54]

图7 软体机械臂空间移动和抓取实验[54]Fig.7 Robotic arm space movement and grasping experiment[54]
气动型软体机器人在医疗领域也有一定的应用研究.陈刚等[55]提出了一种可用于肠镜的软体机器人,如图8 所示,通过控制肠镜末端的弯曲方向与角度,避免结肠镜检查推进与取出过程中肠镜与肠道的不必要接触.研究者建立了软体机器人的运动学模型,并验证了模型的准确性,但并未进行相应的控制设计.

图8 软体机械臂实验平台[55]Fig.8 Experimental platform of the soft robot[55]
气动型被最早应用于软体机器人的设计中,并且由于其具有重量轻、效率高、无污染、环境适应性强等特点,以及由于可以无需铁磁或者电子元件驱动、没有活动部件、具有良好的柔韧性,在强辐射、电磁干扰、粉尘以及外力碾压重击等恶劣条件下拥有较好的可靠性,因而气动型的软体机器人一直受关注.气动型软体机械臂由于通过气体的压缩和舒张使其具有弯曲、握持的能力,所以它的安全性更高,非常适合抓取易碎物品.但复杂的气腔设计使其制造过程繁杂,并且因为是气体驱动,离不开气泵的支持,所以整体造型笨重,欠缺灵活性.
3 软体机械臂的建模与控制
精确的模型是保证闭环控制器拥有良好性能的前提.软体机械臂特定的软体结构,赋予它极好的环境适应能力和安全交互能力,但增加了其建模的难度.软体机械臂具有无限维自由度导致它难以像刚性机器人那样可以用6 个自由度来描述,它的运动还包括弯曲、扭转、拉伸等连续的变形运动.由于复杂的结构特性,使得难以建立完整的运动学和动力学模型,进一步给控制设计带来了极大的挑战.
目前针对刚性机器人的建模和控制已经相当成熟,刚性机器人的运动学和动力学建模一般使用Denavit-Hartenberg 法(D-H 法).其思想是通过旋转矩阵和位置向量构造姿态矩阵,在两个连杆之间进行坐标变换.研究者在研究软体机械臂的过程中,发现其变形后各部分曲率基本恒定的现象.因此研究者们在此基础上,研究出适应于软体机械臂的理论—分段常曲率理论(Piecewise constant curvature,PCC).分段常曲率理论认为,一个软体机械臂是由一系列具有不同曲率和不同弯曲平面的圆弧组成.因此,可以用长度、曲率、偏转角等参数来描述空间曲线的位姿,将曲线中心轴上的点映射到工作空间,建立齐次运动学方程矩阵,然后使用改进D-H 转换,将曲线末端的端点转换为任务空间,给出从形状空间到驱动空间的变换矩阵.但是,PCC 模型仅适用于固定曲率的运动学求解.
对于软体机械臂的控制问题,目前主要针对基于运动学的控制研究,虽然也有部分学者进行了相关的动力学控制设计,但这仍然是一个复杂的问题,本文主要讨论基于运动学的控制.在基于运动学的控制中,与其他类型的机械臂相比,软体机械臂的逆运动学控制[56-58],即通过反解运动学方程来控制曲率使机械臂位于指定的位置,也有很多困难.
因为软体臂有不同的驱动方式,这使得软体臂的驱动空间没有统一的公式表达,并且受传感器测量信息能力的限制,软体臂的关节空间和目标空间也需要特定的调整.因此,软体臂运动学模型的建模和控制激发了大量的研究工作[59-61].
3.1 绳索驱动软体机械臂建模和控制方法
上海交通大学俞晓瑾[62]研制出的绳索驱动的仿章鱼硅胶软体机械臂(图9),通过分段常曲率理论(PCC)[63]建立运动学模型.该方法的思想是将无限多自由度的软体机械臂转化为有限多段恒定曲率的部分,每一段可以使用曲率、长度、偏心角等参数来描述空间曲线的位姿,进而可以得到该段的齐次变化矩阵.此时软体机械臂的运动学建模问题就转化成了传统刚性机器人运动学问题,应用Denavit-Hartenberg 法(D-H 法),即可求出执行器末端相对于基坐标系的坐标.结合视觉伺服的控制方法,实现机械臂的位置控制.

图9 上海交通大学绳索驱动软体机械臂内部结构图[62]Fig.9 Internal structure of the tendon-driven soft robot arm by Shanghai Jiao Tong University[62]
上海交通大学徐璠和王贺升[64]为了提高软体机械臂的环境适用性,将其应用到水下场景(图10).水下的环境的特殊和复杂性,比如水下有较强的外部水流和暗流的干扰,和非常大的坏境不确定性,使得软体机械臂更加难以控制.王贺升团队使用凯恩方法建立了水下的动力学控制模型,它考虑了外部水流对软体机械臂运动状态的影响,并且基于粘弹材料本构方程建模了因软体机械臂形变导致的能量变化.控制方面采用了图像识别技术,实现了对未知相机参数、折射影响和环境干扰的在线估计,避免了水下相机离线标定和传统鲁棒控制中对外界扰动的先验信息求解,在保证控制器性能的同时进一步简化控制任务流程.

图10 上海交通大学软体机械臂[64]Fig.10 Underwater robotic arm by Shanghai Jiaotong University[64]
上海海洋大学刘璇等[65]设计了一种水下绳索驱动软体机械臂.机械臂外部为硅胶,内部为球形万向节联轴器和开孔的基盘级联而成(图11(a)).基盘上的圆孔嵌设拉线用来驱动机械臂实现弯曲运动(图11(b)).

图11 上海海洋大学软体机械臂[65].(a) 万向联轴器结构;(b) 弯曲实验Fig.11 Underwater robotic arm by Shanghai Ocean University[65]:(a) structure of universal coupling;(b) bending test
研究者采用Cosserat 杆理论(Cosserat rod theory),结构矩阵(Configuration matrix)描述机械臂某一时刻的位姿,并从机械臂首段向后依次建立笛卡尔坐标系.结合D-H 法则可求解空间中任意一段坐标系的位置和坐标.机械臂采用了尖顶从动的控制方式,基于PID 控制器控制伺服电机拖动线缆,使得机械臂尖顶到达期望位置,实现机械臂的精确位置控制.
北京科技大学刘志杰等研究人员设计了类章鱼臂的绳索驱动软体机器人的建模和控制,首先采用分段常曲率法建立运动学模型,并将其分为两个子系统.为了促进软体机器人的形状控制,提出了一种自适应神经网络控制器.此外,应用障碍Lyapunov 函数证明了输出跟踪误差满足规定的性能要求.最后,通过仿真验证了所提出控制方案的合理性[66],随后他们采用Cosserat 梁模型建立了动力学模型,重点研究了基于模型的自适应神经网络控制器的设计.针对环境的外部干扰和系统的未建模动态,引入神经网络对其进行补偿,并采用反步法设计自适应控制器,最后利用Lyapunov函数理论证明了闭环系统的稳定性和信号在系统中的收敛性,保证了机械手末端能够跟踪给定的信号[67].此外,还进行了软体机械臂摆动和恒定角度跟踪控制的仿真实验,仿真结果达到了比较理想的效果.
从上述分析中可以看出,目前绳索驱动软体机械臂的主流建模方法是结合D-H 法的PCC 理论和Cosserat 杆理论,使用PCC 理论的建模方法比较简单,而且可以建立常微分方程(Ordinary differential equation,ODE),随后可以使用刚性机械臂里面先进的控制理论和控制策略,但其逆运动学的求解较为复杂,实时控制比较困难,且由于PCC 理论是近似常曲率所以模型的精度不高,控制也有误差.而使用Cosserat 杆理论的建模非常复杂,而且无法直接建立ODE 方程,这就导致其使用场景受限,并且其建立的动力学模型非常复杂.
3.2 形状记忆合金(SMA)软体机械臂建模和控制方法
形状记忆效应是某些金属合金中存在的一种相变现象,通过这种现象,材料在加热到相变温度以上时可以恢复到其原始状态.这种效果归因于SMA 晶体结构的转变.此外,SMA 可以以在高温下稳定的奥氏体晶体线结构和在较低温度下稳定的马氏体结构存在.形状记忆效应现象可以是低温相(马氏体)和高温相(奥氏体)之间的转变,也可以是不同马氏体变体之间的重新定向.加热SMA材料后,它开始从马氏体转变为奥氏体相,然后收缩.即使在高施加负载下也会发生这种收缩,从而导致高致动能力.随后的材料冷却将奥氏体转换回马氏体,并且材料的内部应力将其恢复为原始形状.由于其超弹性特征,只要施加的变形在合金的恢复范围内,镍钛诺的变形-恢复循环就可以重复数百万次.SMA 的基本特征是这些转变的热弹性,这意味着它们可能是由于温度变化或施加在材料上的外部应力引起的.这些特性使得SMA 具有广泛的应用前景,包括力的产生、运动(利用形状记忆)以及能量存储(利用超弹性).还必须考虑到,从宏观的角度来看,这种晶体结构的变化会引起其他物理性质的改变,例如热导率,热膨胀系数或电阻率.
SMA 可以通过几种不同的方法加热,但是对于小直径SMA,最常见的方法是使电流通过它们.通过一个向SMA 施加电流的简单电路,可以通过焦耳效应加热SMA 元件.这里发生两个转换过程.第一个是焦耳效应将电能转化为热能,这种热能触发了SMA 元件的形状恢复过程,并且所产生的恢复能量被转化为机械功.SMA 执行器的带宽通常有限,而冷却速度是主要因素.作为热激活致动器,其致动速度主要取决于SMA 元件的冷却时间,该时间受SMA 到环境的热对流过程的强烈影响.冷却和加热速度还取决于SMA 执行器的尺寸和形状:直径较小的执行器由于其较高的电阻率而更快地加热,而由于其较高的表面积与体积之比,它们可以更快地冷却.通过被动方法(例如散热)或主动方法(例如气流循环或液体冷却)来改善驱动带宽.SMA 的另一个众所周知的问题,也是SMA 执行器领域的主要研究主题之一,是它们的非线性行为.考虑这种非线性操作的原因是,从马氏体到奥氏体的转变发生的温度与从奥氏体到马氏体的转变发生的温度不同,从而产生了迟滞.对于技术应用,迟滞SMA 特性非常重要,必须仔细考虑以达到控制目标.由于SMA 有饱和滞后行为,这将非线性行为引入到系统中,这使得很难为这种类型的执行器开发控制算法.
采用SMA 驱动软体机械臂,通电后,控制软体机械臂的变形和运动[68].圣安娜大学Laschi 等[69]根据章鱼手臂运动的机理设计了一种仿生圆锥形软体机械臂如图12(a)、(b).研究者基于有限元分析法,建立了一种半经验模型,确定了适用于仿生章鱼臂中SMA 致动器的最佳规格以及最佳的排布方式.其内部使用电缆(纵向)和形状记忆合金弹簧(横向)进行驱动,分别模拟纵向肌肉和横向肌肉的收缩以及伸长.软体章鱼臂可以完成弯曲(图12(c))以及伸长和缩短运动(最大的变化幅度是在直径减小20%的情况下,长度伸长89%).

图12 圣安娜大学仿章鱼软体机械臂[69].(a)静止状态;(b)抓握状态;(c)间隔500 ms 运动状态记录Fig.12 Soft-body robotic arm imitating an octopus by Sainte-Anne University[69]: (a) stationary state;(b) grasping state;(c) movement state recording at 500 ms intervals
中国科学技术大学Yang 等[70]研制了一种软体机械臂,其外壳由硅胶制成,硅胶外壳上有序地切割一些孔槽,在孔槽中安装可以测得机械臂弯曲程度的霍尔传感器.机械臂内部均匀放置三组SMA 线圈.机械臂最下层的底板(Bottom plate)和本体固定板(Support base)分别用来固定SMA 线圈和硅胶机械臂本体,如图13(a).

图13 中国科学技术大学张世武团队软体机械臂[70].(a)机械臂构成;(b)机械臂内部几何关系;(c)霍尔元件测量位移Fig.13 SMA-driven robotic arm by the University of Science and Technology of China[70]: (a) mechanical arm composition;(b) internal geometrical relationship of the mechanical arm;(c) Hall element measuring displacement
研究者使用弯曲角度θ和方向角度φ来描述机械臂的运动.通过拉线长度的几何关系(图13(b))以及霍尔元件所测得的位移(图13(c)),其中机械臂半径记为r,可以得出三组SMA 线圈的长度变化(Δl1,Δl2,Δl3)与机械臂弯曲角度θ和方向角度φ的关系.根据线性霍尔元件测得的距离变化(Δlh1,Δlh2,Δlh3)分别乘以常数k,即可得出三组SMA 线圈的长度变化(Δl1,Δl2,Δl3),进而得出机械臂完整的动力学模型.给定期望路径时,系统首先计算出机械臂到达预期位置和形状所需的弯曲角度θ和方向角度φ,结合PID 控制器为SMA 线圈提供相应的电压使其发生形变,进而实现机械臂运动的精确控制.
研究者使用摄像机搭建了测试系统测试了软体机械臂一维运动和二维运动的准确性.在一维弯曲运动测试中(图14(a)),实验者测试了不同电压下,霍尔元件反映的弯曲角度与测试系统所测得弯曲角度相近.二维圆周运动测试中(图14(b)),半径的平均误差为0.16 mm(0.4%).

图14 软体机械臂弯曲运动测试[70].(a) 一维弯曲运动;(b) 二维圆周运动Fig.14 Robotic arm bending motion test[70]: (a) one-dimensional bending motion;(b) two-dimensional circular motion
基于SMA 的驱动器的设计和控制实现难度很大,文献[71]设计了一种柔性记忆合金驱动器,它能提供更多的运动自由度,它具有很好的力/重比、简单、轻巧和小巧的尺寸,使其成为替代气动,液压或电磁阀的理想选择执行器.在这个工作中,所用合金为镍钛诺,并且通过焦耳效应对镍钛诺SMA 线材进行加热.基于Bowden 绳索驱动原理设计了高应变柔性SMA 执行器(图15),这使得弯曲设备成为可能.其设计的执行器具有很大的潜力,可用于可穿戴软机器人.所设计的控制算法采用了基于BPID 的控制算法,可以实现驱动器沿着不同的给定路径运动,并且有较小的误差,受控执行器不会出现过冲现象,也不会限制周期,并且在跟随连续变化的参考点时,围绕设定点的振荡很小.

图15 柔性SMA 驱动器[71]Fig.15 Flexible SMA-based actuator.SMA: shape memory alloy[71]
由于SMA 在相变过程中具有非线性饱和滞后特性,因此难以通过为SMA 执行器系统建立有效的控制器来实现精确的位置跟踪控制.Li 和Pi[72]提出了一种基于模糊时延算法的软体机器人精确位置控制方法.时延估计(Time delay estimation,TDE)的误差是不可避免的,因为时间延迟的最小值是微控制器的采样时间,因此提出了一种基于规则的模糊逻辑控制器,用于在线增益调整和TDC 的组合,以消除位置控制误差.使用步进、正弦和斜坡信号作为参考输入,进行了三组不同的实验.实验结果表明,与TDE 和PI 控制器相比,该方法具有最小的稳态误差和最小的超调量.
从上述的分析中可以看出,目前SMA 驱动的软体机械臂建模方法不成熟,采用的方法仍然大多为PCC 理论,由于其制作材料和其本身的物理特性,使得建立精确的模型非常困难,使用的控制方法也非常的简单,导致目前的SMA 驱动的软体机械臂有大量的工作在其设计和建模上面.
3.3 气动驱动软体机械臂建模和控制方法
气动软体机械臂是指通过在设计的机械臂结构中充气,利用气压使机械臂产生变形或者运动,从而实现驱动的一类软体机械臂[73-74].
中国科学技术大学王宁扬等[75]研制了一种蜂窝夹持器,如图16.该软体机械臂的理论模型具有无限自由度,可以完全拟合物体的表面.为了计算最终抓取状态,根据运动和抓取的特点,对每个选定抓取点的抓取过程进行了仿真.对于每个最终的掌握状态,利用相对形式闭包理论确定决策点,得到可行解集.对于每个可行解,计算了 HPN 软体机械臂的评价函数.然后选择最佳的解决方案,得到最佳的抓取方案.

图16 中国科学技术大学蜂巢气动网络机械臂[75]Fig.16 Honeycomb pneumatic network arm by the University of Science and Technology of China[75]
中国航空航天大学Gong 等[76]研制的软体机械臂由硅胶制成外壳,三个并列式的气动腔体(Chamber)作为中间层,聚二甲基硅氧烷圆柱作为中央支撑作用的芯体如图17(a).压缩空气驱动时,机械臂中间层气动腔体可以达成不同的长度,使得机械臂可以进行全向弯曲.
研究者根据分段常曲率理论推导出了运动学模型.将机械臂的一端定义为参考坐标系,三个弧度参数 (ki,φi,θi),其中下角标i描述为等效关节的段数,描述齐次转换矩阵如图17(b).应用D-H 方法即可得出空间坐标与参数 (ki,φi,θi)之间的关系.根据机械臂内部三个气动腔体的几何关系如图17(c),d为气腔半径,可以得出ki,φi,θi与Chamber 长度 (li1,li2,li3)的 方程.由 (li1,li2,li3)三个参数可得到机械臂尖端的空间坐标.

图17 北京航空航天大学硅胶气动机械臂[76].(a)机械臂内部构造;(b)机械臂坐标系定义;(c) 机械臂内部三个气动腔体的几何关系Fig.17 Silicone pneumatic robotic arm by Beihang University[76]: (a) internal structure of robotic arm;(b) definition of robotic arm coordinate system;(c) geometry of the three pneumatic chambers inside the robotic arm
研究者测量了不同驱动气压下,Chamber 长度(li1,li2,li3)的变化,得出了动力学模型.当压力不超过70 kPa 时,施加的开环控制显示出良好的性能如图18.

图18 硅胶气动机械臂不同驱动气压下机械臂实际形变与理论形变的对比[76]Fig.18 Comparison of the actual and theoretical deformation of the silicone pneumatic arm at different drive air pressures[76]
气动型软体机械臂的设计复杂多变,目前研究者的工作主要针对其设计和材料的研究.建模部分使用的最常用的理论仍然是结合D-H 法的PCC 理论,但气体的走向灵活多变,如何让机械臂的弯曲近似符合PCC 理论这也是一个问题.此外,气动型软体机械臂很难找到符合条件的传感器,这就使得闭环控制非常困难.
3.4 无模型软体机械臂控制方法
无模型控制在刚体机器人领域得到了有效的应用,但是对于软体机械臂来说无模型控制的效果也不尽如人意.软机械臂逆动力学问题的求解对于在任务空间中生成路径以执行抓取或其他任务至关重要.为了解决这个问题,研究人员提出了基于雅可比矩阵的不同迭代方法.虽然这些方法已应用于分段常曲率机械手,但应用于非常曲率机械手依然有一定困难.文献[77]建立了三索驱动的非恒定曲率机械手的精确几何模型.力学模型的微分方程是非线性的,因此解析解很难计算.由于力学模型的精确解不可用,因此无法计算雅可比矩阵的元素.为了克服基于雅可比矩阵的方法的固有问题,首次提出了一种在三维空间运动的柔性机械手逆动力学的神经网络学习方法.经过训练后,前馈神经网络(FNN)能够表示机械臂末端位置与施加在缆绳上的力之间的关系.但是这种方法并没有考虑到实际系统的随机性.文献[78]提出了一种新的思路,将强化学习技术用在了让软体机械臂的控制上,当目标位置与实际位置相差比较大的时候,用PID 的控制效果反而更加优秀,而当距离比较接近的时候,强化学习的效果才会更优于PID,但是控制时间较长.文献[79]设计了包括交替肌腱和径向排列的气动装置,可实现伸长、收缩和全方位弯曲.这项工作提出了一种基于多智能体协同强化学习的同时优化刚度和位置的新算法.结果表明,设计和控制的有效性有助于辅助装置的发展,但是这种方法对外部干扰很敏感.文献[80]首次尝试用基于模糊模型的方法对连续体机械手进行运动学控制.提出了一种用于连续机械手末端执行器轨迹跟踪任务的模糊控制器.采用隶属函数来组合线性化状态空间模型,从而得到一个总体上的模糊模型.模糊模型有助于模糊控制器的设计;这一控制方法使得解决这一运动控制问题的计算量小,不需要不断更新连续介质机械手的雅可比矩阵.文献[81]为了克服结构参数不确定性和绳索驱动模型复杂性的问题,提出了一种基于时延估计和模糊自整定的非线性控制器,未知的动力学和干扰是通过延迟前一运动状态的时间来估计的,控制增益通过模糊控制器进行自我调整,可以减少由于系统不确定性和外部干扰而引起的误差.结果表明,与传统的PD 控制和时滞控制相比,基于时延估计的控制方案可以显着降低控制增益,从而提高绳索驱动机器人的关节轨迹跟踪精度.
4 结语与展望
本文首先介绍了软体机械臂的定义,其次重点介绍了目前主流的三种驱动方式以及目前应用这三种驱动方式的成果,接着对软体机械臂的建模和控制做了简要的概述,分析了目前软体机械臂在建模和控制上遇到的问题.
目前软体机械臂的驱动方式仍然是绳索驱动占主要部分,它有制造简单、负载能力强等优点,但基于绳索驱动的软体机械臂带载能力弱,缺乏模块化的解决方案.而SMA 驱动和气动的驱动方式使得模型的制造困难,建模和控制不精确,它的优点是带载能力相对较强,未来可以实现模块化、一体化的设计.根据目前软体机械臂的研究现况,未来还需要从以下几个方面开展研究:
从驱动角度来看,对于SMA 驱动来说,尽管SMA 已经获得了比较广泛地应用,但是SMA 在高温奥氏体变为低温马氏体发生形变,再恢复的过程比较缓慢,如何克服这个缓慢的过程发挥其最大功用也是一个研究方向.对于气动型软体机械臂,迫切需要新材料,新的设计机构,因气动型软体臂的变形是靠气腔的收缩和膨胀来完成,气腔抗压一旦气腔受到破坏,那么整个气动系统就会失效,所以研发一种不易破损的新型材料对气动软体臂有重要的意义.此外,气动型软体机械臂的驱动结构设计也对其驱动性能有着决定性的影响.对于绳索驱动软体臂,虽然能提供的输出力矩大,并且绳索可以穿越复杂的路径很好的贴合在软体臂上,但是它需要一套外部的装置,这就大大降低了其应用空间,如何简化其辅助装置是未来一项重要的工作.
从建模角度来看,在现有的软体机械臂中,都存在控制精度低的问题,这就使软体机械臂很难在医疗,装配等精细领域发挥价值,这是因为软体机械臂的材料具有很强的非线性,并且具有无限自由度,目前对它的运动机理和相关理论还不了解,使得建模和控制困难,无论是常见的PCC 建模,SMA 的热模型还是Cosserat 梁建模,建立的模型精度不如刚性机械臂.为了解决这个问题,发展一套软体机械臂的建模理论是非常必要的.此外,如何更精确的描述软体机械臂的各个状态变量,如软体臂本身的扭转、弯曲等也是一个难题.
从控制角度看,对于绳索驱动的软体机械臂而言,逆运动学的求解方面还需要一个长期的研究,动力学模型应尽量可以完整的描述整个机械臂的运动,控制策略要尽可能地实现实时地精确控制,并可以补偿建模上地不精确部分.对于气动型软体机械臂来说,因为气体加压的方式有限,在信号发生器和驱动执行器之间存在着一个明显的时间滞后,对软体机械臂的运动产生一定的影响,如何解决这个迟滞问题也是一个研究方向.对于SMA 驱动型软体机械臂来说,因为SMA 在相变过程中存在饱和滞后的问题,如何采用合适的控制方案来解决这个饱和滞后问题也是一个研究方向.
在软体机械臂的研究中,传感器的研究也是一个重要的方向.目前,有几种传感器可以适应软体机械臂弯曲和扭转,但都有其局限性.EMI 传感器可以测量软体机械臂的姿态,但易受电磁环境的影响;flex 弯曲度传感器可以弯曲,但是方向单一;用FBG 传感器也可以测得弹性形变,但是容易坏,价格高.因此,具有柔软特性的传感器研究就变得格外重要.
尽管目前针对软体机械臂的研究已经涌现了非常可喜的成果,但是软体机械臂的研究还有一段很长的路要走.未来的软体机械臂一定是一个多学科交叉的成果,它也会各个领域大放光彩.此外未来还需要将更多的工作投入于软体机械臂的精确建模与控制,多传感、多驱动的建模与控制,软体臂的协同作业的建模与控制,路径规划控制,优化控制,模型预测控制等等方面.随着软体机械臂技术的不断成熟和突破,在不久的将来,软体机械臂会在灾后救援、术后康复、微创手术、飞行器维护、工业制造等更多的领域发挥更重要的作用.