基于改进Canny算法的齿轮表面边缘检测
2022-11-05李小龙杨慧斌刘向前
李小龙,闫 娟,杨慧斌,刘向前
(上海工程技术大学 机械与汽车工程学院,上海 201620)
0 引言
随着制造业的快速发展,对高效、高精度制造条件下的机械零部件质量检测的需求不断增长。考虑到齿轮是机械行业中常会用到的传动部件,为此齿轮的质量在生产中就显得尤为重要。表面缺陷是直接影响齿轮质量和批量生产的主要因素之一,齿轮表面缺陷的检测主要依靠人工目视检查方法。这些方法费时、低效、不准确,还会造成视觉疲劳。人眼的识别能力是有限的,其结果取决于人的主观检查。机器视觉技术是通过光学设备和非接触式传感器对真实物体进行扫描和处理,并将信号转换成计算机可以分析识别的数字信号,从而获得所需信息或达到控制物体的目的。在机器视觉检测中,检测图像的边缘是将对象特征轮廓与其背景分开,为下一步检测和识别图像特征做准备,是图像处理技术中重要的一环。近年来,Canny算子、Sobel算子、Prewitt算子等多种边缘检测算子被广泛应用于检测图像的边缘,二阶微分算子中的拉普拉斯算子、LOG算子等具有计算简单、高效、易于实现等特点,但是对噪声较敏感,工程应用中检测效果不理想。在此背景下,Zhao等人提出了一种基于离散余弦变换(DCT)的改进Canny边缘检测算法。Rong等人提出了一种改进的Canny边缘检测算法,通过引入引力场强的概念来代替图像梯度,得到了引力场强算子。Chen等人改进了Canny边缘检测,通过提出一种新的自适应中值和形态的混合滤波器组,采用混合滤波器组来平滑噪声图像,平滑效果较好。Mittal等人提出一种通过调整值改进Canny边缘检测算法的有效方法。Buades等人提出了一种称为非局部均值(NLM)的去噪方法。肖文韬 等人提出利用Mahala Nobis距离对噪声齿轮图像进行边缘检测结合图像增强来改进自适应中值滤波器。陈顺等人提出了融合Canny算子和形态学的图像边缘检测研究。
综合前述文献研究的基础上,本文提出了一种改进Canny算子的齿轮表面边缘检测方法,即在Canny算子中结合离散余弦变换(DCT)2系数和非局部均值算法(NLM)来代替高斯滤波器,能有效地抑制噪声,并能更有效地提取齿轮边缘。
1 传统的Canny边缘检测算法
在彩色图像中,检测边缘的常用方法是先对原始图像进行灰度化、去噪等预处理,接下来进行平滑图像、计算图像梯度、对梯度值进行非极大值抑制等一系列处理,即采用传统的Canny算法确定被检测图像的边缘。
2 改进的边缘检测算法
传统的Canny方法是使用高斯函数进行去噪,一般来说,平滑度总是取决于高斯核的大小,并会直接影响边缘检测的质量。同时,实验表明,使用高斯函数去噪的效果不是很理想,因其在去除高斯噪声方面受到限制,而图像总是受到椒盐噪声、瑞利噪声、高斯白噪声等噪声的影响。针对这些问题,本文提出了一种基于DCT和NLM的改进Canny边缘检测算法。图像函数可以在IDCT的基础上用DCT系数来描述,DCT的优点就是能够将基数变化后的信号能量集中在第一次变换系数中,因此在低频中。这允许消除其余的高频系数,然后利用非本地手段来消除图像的高频率。
2.1 离散余弦变换DCT算法
原始图像I的矩阵为,由一系列离散像素组成。DCT变换可以使用正弦和余弦函数将离散图像变成连续域。DCT变换公式如下所示:
其中,

2.1.1 DCT系数
DCT系数可以从主方程(1)中获得,图像信息是值系数的表示。可用于对高频分量进行去噪的数学公式具体如下:

2.1.2 逆离散余弦变换IDCT
IDCT变换是DCT的逆变换得到图像的系数,此时需用到的数学公式为:
2.2 非局部均值算法
非局部均值(NLM)是图像处理中去除噪声的一种算法,这种方法是在图像中找到远程信息的冗余,基于图像本身存在的自相似性、即在图像中寻找相似的像素点(patch),再根据所得结果与像素点的相似度计算加权平均值,从而解决去噪问题。
设是与∈)相似的像素集,从而:

其中,()是像素、()的去噪值,是图像在点(∈Ω)、(,)处的未滤波值,即加权函数。
得到了这些像素(补丁)的邻域之间的距离,权重(,)被归一化,给出以下等式:

在非局部均值算法中,去噪图像的估计依据为:

其中,表示归一化因子;表示固定像素处的路径;表示类似于的补丁;表示平滑度控制参数。
通过DCT变换、DCT系数校正、IDCT变换、NLM,可以得到平滑的图像,此后对传统Canny边缘检测算法中显示的每个像素进行图像梯度到边缘确定和连接处理。
3 实验结果与分析
为了验证本文融合算法的去噪能力和边缘检测效果,实验在Linux Ubuntu 20操作系统上的Python3.9上进行。本课题以512×512标准Lena图像和不同尺寸背景的齿轮图像为例,对比分析了本文提出的算法和传统算法对去噪能力、定位精度和边缘连续性的优化。
峰值信噪比 (peak signal-to-noise ratio,)是图像的最大可能功率与影响其表示质量的破坏噪声功率之间的比率,峰值信噪比越大表明失真越少。图像的一般用于在最大值信号和背景噪音之间的对比,定义如下所示:

其中,是图像中最大可能强度级别的数量(假设最小强度级别为0)。
是均方误差,数学定义为:

其中,表示原始图像的矩阵数据;表示退化图像的矩阵数据;表示像素的行数;表示图像该行的索引;表示像素的列数;表示图像该列的索引;是均方根误差。
图1为Lena图像采用传统去噪方法和本文提出算法的去噪结果以及Canny检测结果对比,图2~图4分别为塑料齿轮图像、正齿轮图像以及罗彻斯特齿轮图像的对比结果。

图1 Lena测试图Fig.1 Lena test images

图2 塑料齿轮对比图Fig.2 Plastic gears contrast diagram

图3 正齿轮对比图Fig.3 spur gears contrast diagram
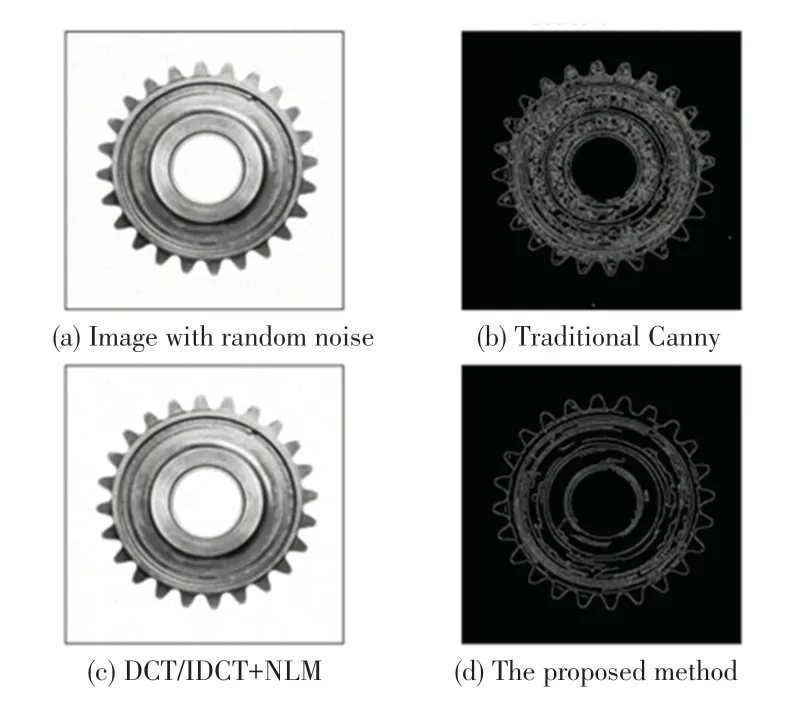
图4 罗切斯特齿轮图像对比图Fig.4 Rochester gear images contrast diagram
表1~表4分别显示了Lena图像、塑料齿轮图像、正齿轮图像、罗切斯特齿轮图像的传统Canny算法、文献[9]融合算法、自适应滤波算法以及本文提出的改进Canny算法的峰值信噪比。

表1 Lena图像的峰值信噪比对比Tab.1 Peak signal-to-noise ratio of Lena

表2 塑料齿轮峰值信噪比Tab.2 Peak signal-to-noise ratio of plastic gears

表4 罗切斯特齿轮图像峰值信噪比对比Tab.4 Peak signal-to-noise ratio comparison of Rochester gear images

表3 正齿轮峰值信噪比对比Tab.3 Peak signal-to-noise ratio comparison of spur gears
峰值信噪比最常用于估计压缩器、滤波器等的效率,峰值信噪比的结果值越大,相应的压缩或滤波器方法的效率就越高。
在所有测试中,本文提出方法的峰值信噪比均高于传统的Canny算法。因此,本文提出的改进Canny边缘检测算法在抑制噪声和保留良好边缘信息方面非常有效。
4 结束语
本文提出了一种改进的Canny边缘检测算法。该方法基于DCT和NLM变换,处理DCT系数和反DCT,结合NLM代替传统的高斯函数进行去噪,计算图像梯度、非极大值抑制和边缘连接,从而得到最终的边缘图像。改进后的算法既保留了传统Canny算法的优点,又增强了噪声抑制能力,保留了更多的边缘信息。对比结果表明,本文提出的改进算法优于传统的Canny边缘检测方法。
