基于Mission Planner的无人机自主导航测量系统设计与实现
2022-11-04马晨皓杨国东邸健张旭晴
马晨皓, 杨国东, 邸健, 张旭晴
(1.吉林大学地球探测科学与技术学院, 长春 130026; 2.吉林省水利水电勘测设计研究院, 长春 130026)
随着测绘行业的蓬勃发展,无人机作为一种提供地理信息数据采集的新型技术,得到了前所未有的发展。无人机系统优势明显,主要表现为响应速度快、机动性能好,在农业、林业、能源、国土调查等领域发挥极其重要的作用[1-2]。近些年,全球导航卫星系统发展迅速,接收机的成本、尺寸和重量不断减小,而定位精度不断提高[3]。目前,许多学者多研究无人机在遥感方面及高精度全球导航卫星系统(global navigation satellite system,GNSS)测量系统的应用。鲁鹏等[4]针对砂船量方采用传统方法计算较难的问题,采用新型无人机测绘技术获取砂船影像,并将获取的数据进行解算生成点云,最终计算砂船的载沙量。杜蒙蒙等[5]针对传统农田地形测绘方法自动化程度不高,将无人机与激光测距技术相结合,并对农田地形进行测量,结果表明自动化程度大大提高。池文浩等[6]针对传统的RTK(real time kinematic)、全站仪外业采集碎步点效率较低的问题,利用无人机摄影测量技术测绘1∶500地形图,结果表明极大提高了测量效率。董景利[7]针对商用GNSS测量系统成本较高的问题,利用NEO-M8P芯片构建一套GNSS系统并进行静态测量,实验结果表明该系统的定位精度可达到厘米级。目前并未有研究将RTK或PPK(post processed kinematic)测量系统搭载到无人机上代替人工进行点位测量,因此现设计一款基于Mission Planner开源地面站和GNSS相结合的无人机自主导航测量系统,实现点位三维数据的精准量测,为今后开展全自动测量技术设备的研发提供理论基础和实践参考。
1 多旋翼无人机运动分析
采用导航坐标系和机体坐标系描述四旋翼无人机的飞行姿态,如图1所示,其中F1、F2、F3、F4分别为相应旋翼所产生的升力。在导航坐标系中,Ozn、Oxn垂直于Oyn并且在同一水平面中,Ozn轴垂直于水平面,其中Oxn和Oyn的方向分别为东和北[8-9]。在机体坐标系中,原点定义为机体中心,Oxb轴为旋翼3和旋翼4与原点的角平分线,同理Oyb轴为旋翼1和旋翼4与原点的角平分线,并且Oxb与Oyb相互垂直,Ozb轴垂直向上。姿态测量系统中的磁力计、加速计、陀螺仪等传感器均以机体坐标系为基准输出坐标值。因此,将横滚角定义为Oxb轴与水平面的夹角φ,俯仰角为Oyb与水平面的夹角,偏航角为绕Ozb轴旋转角ψ,顺时针方向为正[10]。
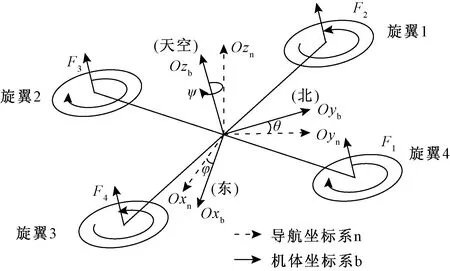
图1 四旋翼无人机导航坐标系和机体坐标系Fig.1 Four-rotor UAV navigation coordinate system and body coordinate system
2 自主导航测量系统
2.1 总体设计
自主导航测量系统共分为地面控制系统和无人机飞行平台两个部分。地面站、数传图传交互模块和GNSS基准站构成地面控制系统;动力装置、Pixhawk飞行控制系统、GNSS接收机、电子罗盘模块和数传图传交互模块构成无人机飞行平台。此套自主导航测量系统的整体结构如图2所示。
整个控制系统通过无人机内环飞控完成机体的稳定飞行以及俯仰、横滚、偏航等动作。GNSS系统2通过与卫星信号进行交互,实时解算出无人机的位置信息,最终通过数传系统2将各类信息发送至地面站中。GNSS模块1与地面控制系统的基准站构成PPK后差分系统,从而获取高精度的无人机位置信息。相机将所获取的视频数据通过图传模块实时将视频流数据发送至地面站。
2.2 无人机飞行平台及地面控制站的搭建
采用四旋翼飞行器作为飞行平台,飞行器的组件主要包括:F450机架、YH 2216自锁电机、好盈乐天20A电调、1047螺旋桨、Pixhawk飞控、NEO-M8T GNSS和视频叠加OSD(on-screen display)模块,飞机轴距设计为450 mm。
在无人机上搭载主要的功能部件,通过集成开发,组成无人机飞行平台。主要的功能部件为:V5数传电台、TS832图传发射机、相机、云台、PPK移动站,最终构建的无人机飞行平台如图3所示。

图2 系统整体结构图Fig.2 System overall structure diagram
地面控制系统(图4)采集无人机的空间位置、航向、视频等信息,同时采用PID(proportion integration differentiation)控制算法完成无人机的飞行控制。主要的部件有:RC832图传接收机、V5数传电台、Mission Planner地面站、FS-AT9S型遥控器、便携式计算机(处理器i5-3337U,GT720M,内存8 G,华硕)。
2.3 PPK-GNSS定位装置设计
为获取准确的空间位置数据,本系统设计一套PPK后差分系统采集数据。移动站和基准站均采用U-blox公司的NEO-M8T芯片,该芯片可接收BDS、GPS、GLONASS和Galileo等其他卫星系统信号,其中接收机的尺寸为5.5 cm×3.4 cm×1.2 cm。此套后差分系统的基准站采样频率设定为1 Hz,移动站采样频率为10 Hz,PPK差分系统如图5所示。

图3 无人机飞行平台实物图Fig.3 A physical picture of the UAV flight platform

图4 地面控制系统实物图Fig.4 Physical drawing of ground control system
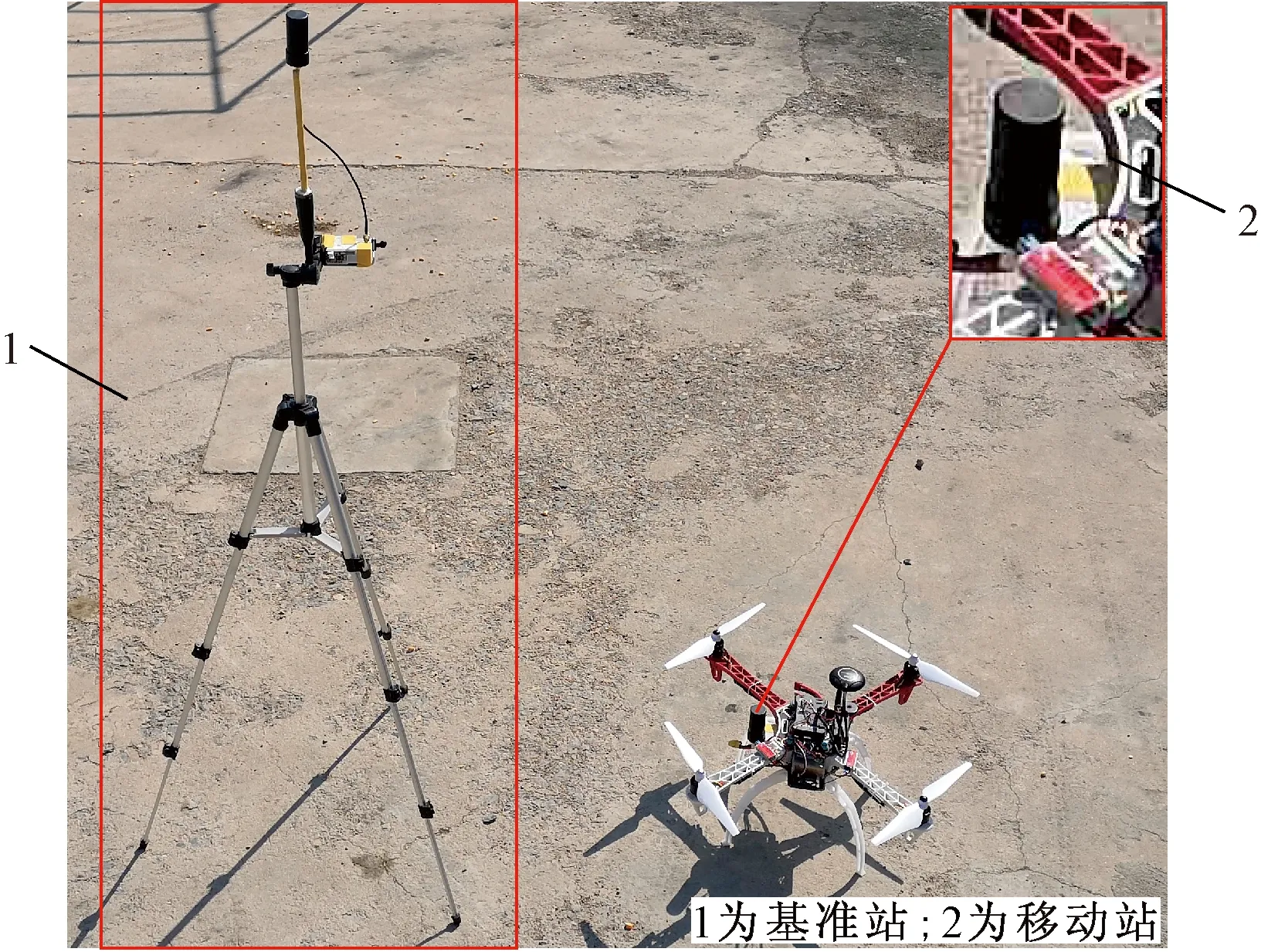
图5 PPK差分系统Fig.5 PPK difference system
3 无人机飞行自主路径规划
3.1 无人机地面测控系统
Mission Planner地面站是开源地面控制软件,主要用于旋翼和固定翼等其他机型,为无人机提供动力学控制[11]。Mission Planner作为无人机地面测控系统,工作人员可通过该系统对无人机进行实时控制,同时无人机端将所获取的坐标信息以及无人机自身信息实时回传,例如电量、空间位置、连接情况等。地面测控系统主要分为地图模块、数据存储模块、通讯模块和交互模块,具体的实现功能如图6所示。
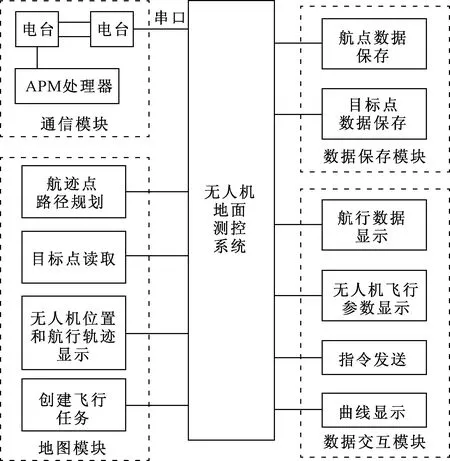
图6 地面测控系统模块Fig.6 Ground measurement and control system module
使用系统中的地图模块可实现航迹点路径规划、目标点的读取、无人机位置和航行轨迹显示、创建飞行任务;数据交互模块可实现机载端各类数据的显示以及地面端指令的发送等;数据保存模块主要实现规划航点和目标航点的数据保存。
3.2 航迹控制系统模型
航迹控制是指当无人机按照预先设定的航线飞行时,计算实际飞行航线与规划航线的距离偏差,通过控制无人机四个电机的转速消除航向偏差和距离偏差。如图7所示,航迹控制算法利用双闭环控制的方式,实现对无人机飞行航向和航速的控制。当对无人机的飞行路线进行控制时,利用APM(advanced power management)处理器中的惯性导航系统获取无人机的空间位置和航向等相关信息,同时根据Mission Planner地面测控站获取规划的目标轨迹[12]。最终计算两者的差值得到实际轨迹与规划轨迹的距离偏差η和航向偏差Δψ。航迹控制通过双闭环控制法将位置和航向控制进行分离,从而完成航迹的有效控制。

图7 航迹控制原理图Fig.7 Track control schematic
PID控制算法是无人机控制系统的关键技术,具有高可靠性、多功能性和易操作性。当对航向控制系统进行分析时,无人机的PID控制原理如图8所示[13]。
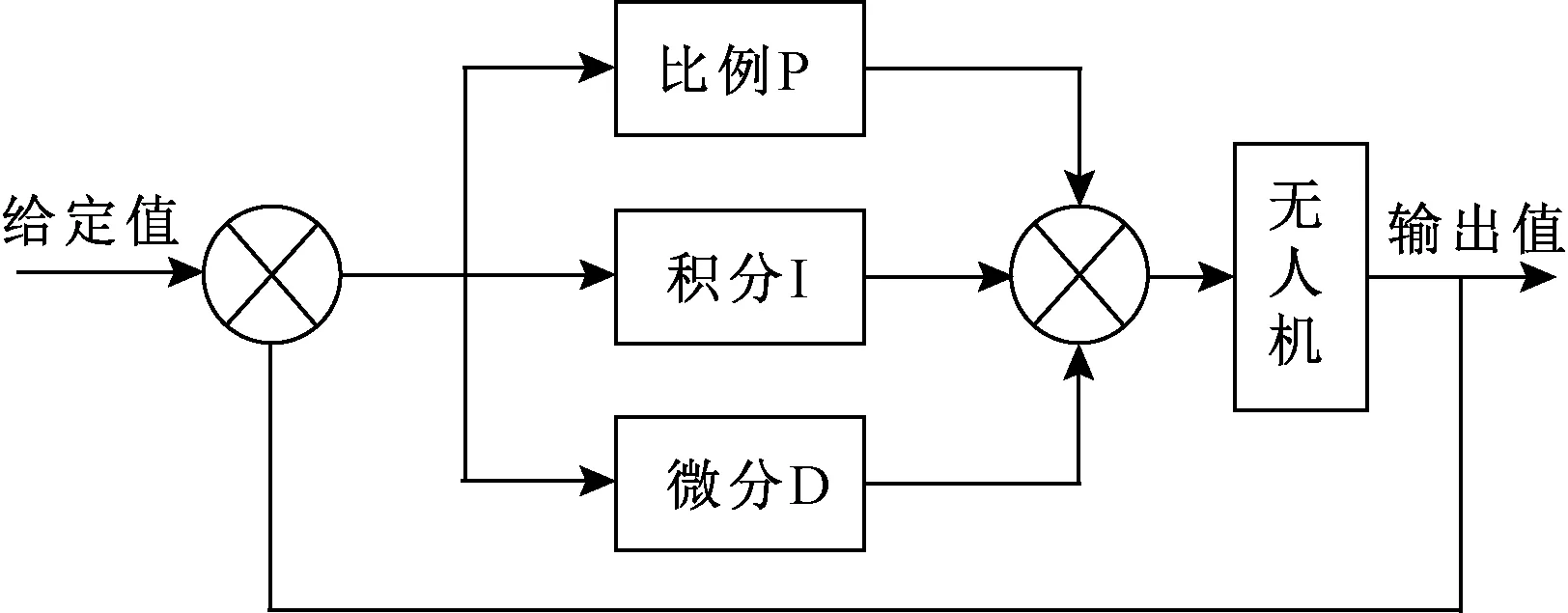
图8 无人机PID控制器原理图Fig.8 UAV PID controller schematic diagram
标准的航向控制PID公式为
(1)
式(1)中:KP代表系统响应速度的快慢;KI为消除静态误差;KD代表闭环系统的稳定性强弱。通过对PID控制原理进行分析,无人机航向控制的输入量是由给定值和真实值的差值Δψ做比例、积分、微分,最后将三者求和得到。
在整个系统中具有至关重要作用的是PID的参数整定,方法主要包括以下三种:临界比例法、试凑法和衰减曲线法。其中最为简单易用的是衰减曲线法,且应用范围较广。具体的实现过程是首先对比例系数进行由小到大的调节,最终使系统的衰减比达到4∶1。需要将震荡周期参数TS1和比例调节参数KP1进行记录,并利用表1中的整定算法计算得出PID的相关参数。

表1 衰减曲线法PID参数整定计算表Table 1 Attenuation curve method PID parameter tuning calculation table
3.3 航迹规划与自主导航
地面控制系统利用数传电台与Pixhawk飞行控制系统进行通信,通过MAVLinK通信协议实现两者之间的数据交互。连接成功后,地面站主界面中将显示无人机的各类数据,如经纬度信息、高程信息、飞行速度和高度等信息。在执行任务之前可将任务区域的影像图进行下载,通过Pixhawk飞控系统GNSS定位模块可解析出无人机的定位信息,并在影像图中实时显示无人机的位置和任务区域的位置,如图9所示。
Mission Planner地面站可设置无人机的起飞点、降落点,飞行航线、速度和高度等参数,实现无人机的全自主导航作业。使用地面站中的Goole Maps进行即点即得的航点输入,同时可以调整飞行的姿态和速度。也可以利用地面站中自动航点的功能,根据在地图上所绘制的区域范围,自动生成无人机的航线方向、间距和速度,最终生成较为合理的最优自主航线。航线规划完成后,地面站中将显示路径中每个航点的具体信息,如图10所示。飞机在接收地面站发送的指令后进行飞行,并实时记录相应的数据,将其保存至.tlog文件中。飞机返航后,可在地面站中对航行任务数据进行回放和分析。

图9 Mission Planner地面站主界面Fig.9 Mission Planner earth station main interface

图10 规划航线界面Fig.10 Planned route interface
4 系统测试
4.1 GNSS-BDS/GPS系统定位测试
快速准确的定位能力是无人机导航控制的基础,为验证本系统中PPK后差分系统的定位精度,进行了无人机的静态定位试验。共设计三组不同的基线长度进行静态测量,分别为1、2、5 km。移动站以10 Hz的频率采集定位点的数据,最终与基准站所获取的数据进行后差分处理,利用RTKLIB软件对所获取的原始数据进行PPK解算,点位分布如图11所示。数据解算结果如图12和表2所示,对于BDS/GPS组合定位,此套PPK后差分系统在N、E、U方向的定位精度为厘米级,证明其稳定性较好,满足设计要求。

表2 不同长度基线解算结果Table 2 Baseline calculation results of different lengths
4.2 无人机自动导航对比试验
本节将Mission Planner地面站与APM相结合,测试无人机航线自主导航的准确性。利用无人机进行自主导航的对比试验,共规划4条航线,设定无人机的飞行顺序为1→2→3→4→5→6→7→8,目标点的经纬度信息如表3所示。
APM处理器利用内部的PID算法控制飞机的航向和航速,将首个目标点规定为当前飞行路径的终点,在无人机到达目标点位后,进而进行路径的切换。通过对数据进行解析,得出无人机在飞行过程中所获取的卫星数、信号连续性、空间几何强度因子PDOP(position dilution of precision)值和信噪比,数据解算结果如图13~图15所示,结果表明动态飞行测试效果良好。

图11 点位分布图Fig.11 Point distribution map

图12 不同长度基线PPK解算精度图Fig.12 Calculating accuracy of different length baselines PPK
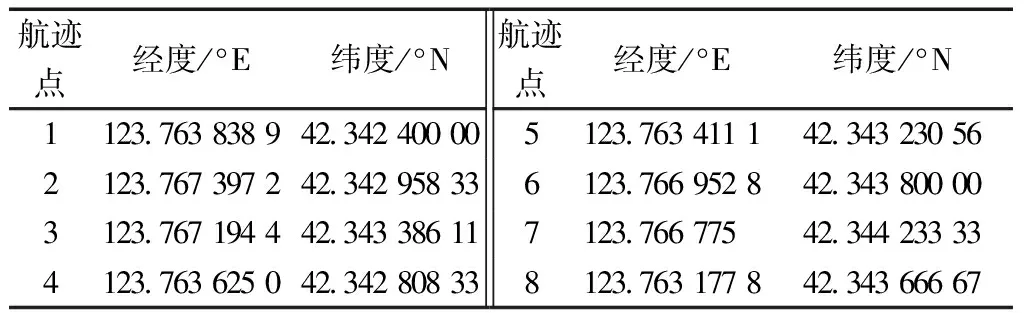
表3 路径航迹点位置坐标Table 3 Position coordinates of path track points

图13 卫星数Fig.13 Number of satellites

图14 PDOP值Fig.14 PDOP value
分别在每条航线上选取6个点作为精度检查点,共获取24组数据。同时与规划的航线进行对比,计算每个点的偏移距离。图16为4条路径的偏差分析数据,经过计算得出无人机水平定位精度为0.39 m,达到分米级的定位精度。
4.3 点位坐标测量试验
共设计7个目标点用于坐标测量,使用木桩和白油漆作为点位标志,便于通过相机找到精确的点位中心。首先假设基准站,静置10 min后,通过手持PPK-GNSS移动站设备分别测得7个地面点的精确坐标。然后无人机通电,待出现固定解后,在Mission Planner地面站中规划航线界面的Goole maps地图中分别点击7个点所在的位置,生成航线图,进行全自主点位坐标测量,点位标记如图17所示。

图15 航线对比Fig.15 Route contrast
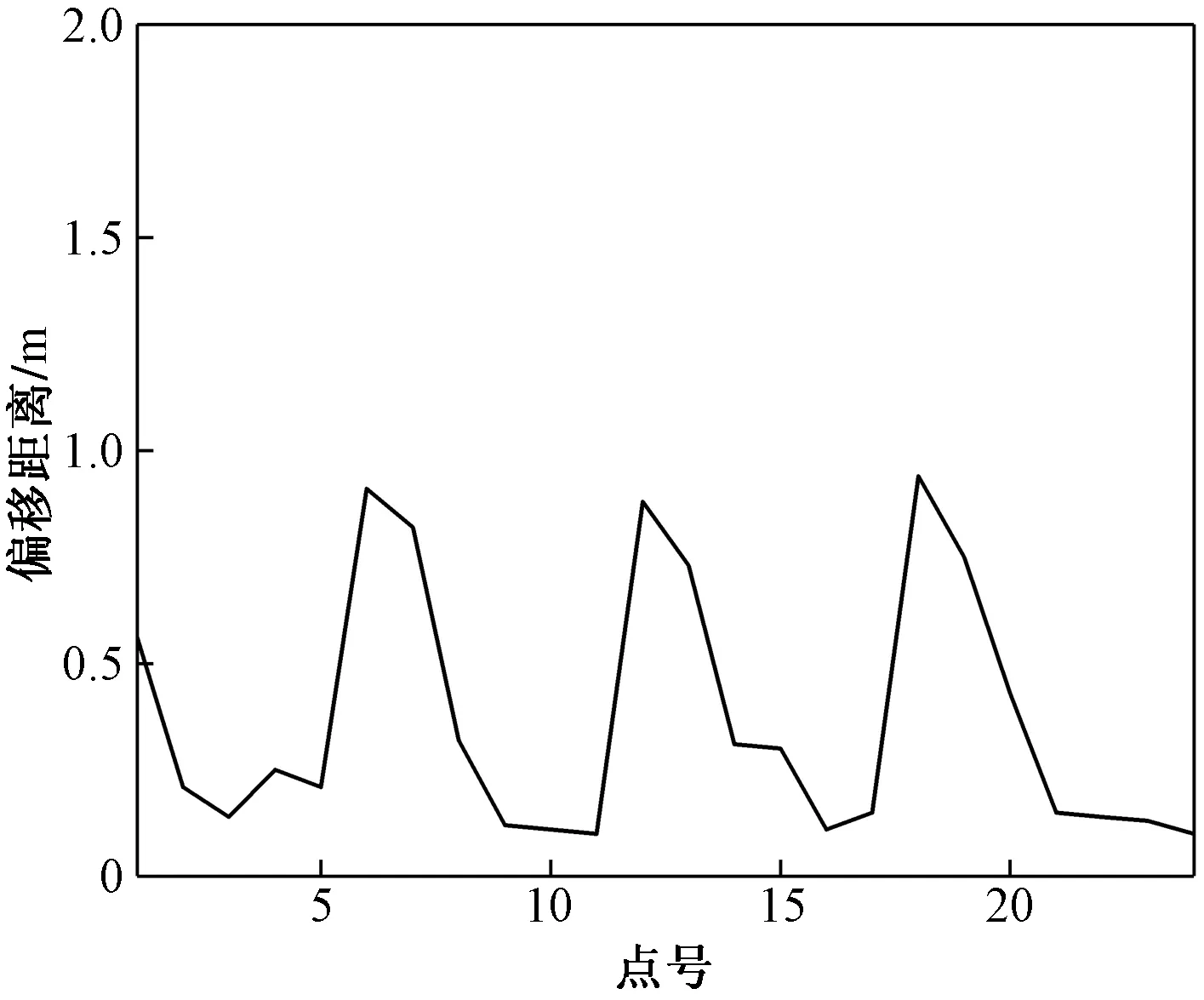
图16 偏差分析图Fig.16 Deviation analysis diagram

图17 点位标记Fig.17 Point mark
由于规划的点位只是粗略的位置,所以当无人机到达每个点位上方时,通过相机捕捉到地面的十字喷漆标记,无人机自动降到距离地面2 m的位置,通过手动调节方式使十字标记处于相机中心处,进行拍照。每个点位共拍摄10次,即获取10个坐标,取平均值后即为该点的真实坐标。由于PPK移动站没有直接接触到木桩,所以高程数据需要计算,公式为
H=h测+Δh-h设
(2)
式(2)中:H为最终的高程;h测为测量的真实值;h设为无人机飞行的设计高度;Δh为导航GPS天线与PPK天线的高差。最终通过无人机测得数据与真实坐标的对比如表4所示。水平方向和垂直方向的定位精度均达能到10 cm,且定位稳定性较好,满足工程测量的实际需求。
5 结论
基于Mission Planner开源地面站和GNSS定位装置,设计实现了无人机自主导航测量系统,通过对其进行系统测试,得到以下结论。
(1)设计完成了PPK-GNSS定位装置与无人机航迹控制系统。该系统由无人机飞行平台和地面控制站两部分组成,无人机飞行平台以四旋翼无人机为载体, 整个平台飞行稳定,控制性能良好,设计并搭建了以 NEO-M8T芯片为核心的 PPK-GNSS 定位装置。
(2)通过Mission Planner地面测控系统中的地图模块、数据存储模块、数据交互模块和通信模块,实现无人机的飞行路线规划、航点位置数据读取、实时显示无人机的位置和飞行轨迹等功能。
(3)系统试验结果表明PPK-GNSS模块定位精度达到厘米级,无人机自动导航定位精度达到分米级。将两者相结合进行点位坐标测量试验,定位精度均能达到10 cm,此套系统具有较高的定位精度和稳定性,效率较高。

表4 测量点与真实点的三维坐标值Table 4 The three-dimensional coordinate value of the measuring point and the real point
