动态无功补偿装置的能力比较
2022-11-03王永辉宋广磊刘冰
王永辉,宋广磊,刘冰
(许继电气股份有限公司,河南 许昌 461000)
0 引言
动态无功补偿装置在我国电力系统中广泛应用,为提供交直流系统的暂态特性[1],优化电网运行[2-6],提高可再生能源的吸纳[7-8]做出重要贡献。现有文献对动态无功补偿装置的控制和测试有较多的研究[9-13],但是对不同动态无功补偿装置的动态性能比较仍缺乏深入的认识。当今可用的无功补偿设备可分为三大类:同步调相机(synchronous condenser,SC)、静止无功补偿器(static var compensator,SVC)和静止同步补偿器(static synchronous compensator,STATCOM)。这3 种类型的补偿器在电力系统中应用广泛,了解这3 种类型补偿器的静态和动态性能非常重要。国内外的文献和专著[14-17]不同动态无功补偿装置做过一些比较,但是不够系统和完全。本文对动态无功补偿装置的功能进行了系统的介绍和讨论。
在本文中,以解析方式比较了这3 种类型的补偿器提高电压稳定性和转子角稳定性的静态能力,取得对这些设备最大无功处理的准确认识。然后使用简单的测试系统通过电磁暂态仿真来研究暂态过程中补偿器的动态性能。简单系统中的分析和仿真可以揭示这些无功补偿器的本质特性,为进一步研究这些补偿器在电力系统中的影响打下基础。
1 无功补偿装置的建模
本文研究了各种无功补偿器的稳态和动态性能。使用分析推导和简单的Matlab 工具来研究补偿器的稳态行为,并使用电磁暂态(EMT)数字仿真工具来研究补偿器在暂态期间的行为。本节介绍如何在稳态和暂态中对无功补偿器建模。讨论了3 种常用的动态无功功率补偿器:同步调相机(SC)、静止无功补偿器(SVC)和静止同步补偿器(STATCOM)。
1.1 同步调相机(SC)的建模
同步调相机基本上是仅输出无功功率的同步发电机,简称调相机。图1 为同步调相机及其控制的基本电路图。调相机和连接的电网之间交换的无功功率由内电压确定,该内电压与励磁电流成比例。通过改变励磁电压,可以改变调相机的无功功率输出,以保持机端母线电压。
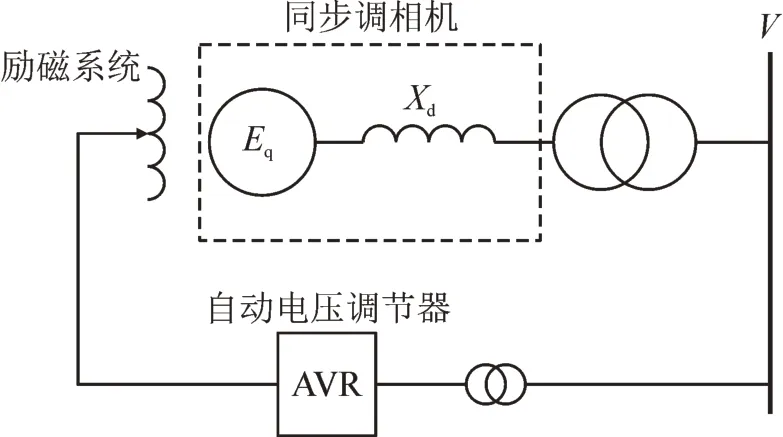
图1 同步调相机等值电路Fig.1 Equivalent circuit of synchronous condenser
在稳态状态下,同步调相机建模为可控电压源,该电压源可在达到其无功功率极限之前使母线电压保持恒定。通常会引入斜率控制来进行电压控制协调,从而相对于无功电流以略微的斜率控制母线线电压。达到无功功率出力极限后,可以将同步调相机建模为电流源。电流限制通常由过电流保护继电器施加。这种模型在稳态下是合理的,因为如果调相机以非常大的电流连续运行,则保护继电器将过电流跳闸。在暂态过程中,过电流继电器具有时间延迟,不会在快速跳闸。所以励磁电压上限决定了暂态期间同步调相机的输出。在某些情况下,同步调相机的输出可能会大大高于其稳态额定值。
上述控制原理见图2。可以使用连接到电力系统的同步调相机的等效电路进一步解释,见图3。
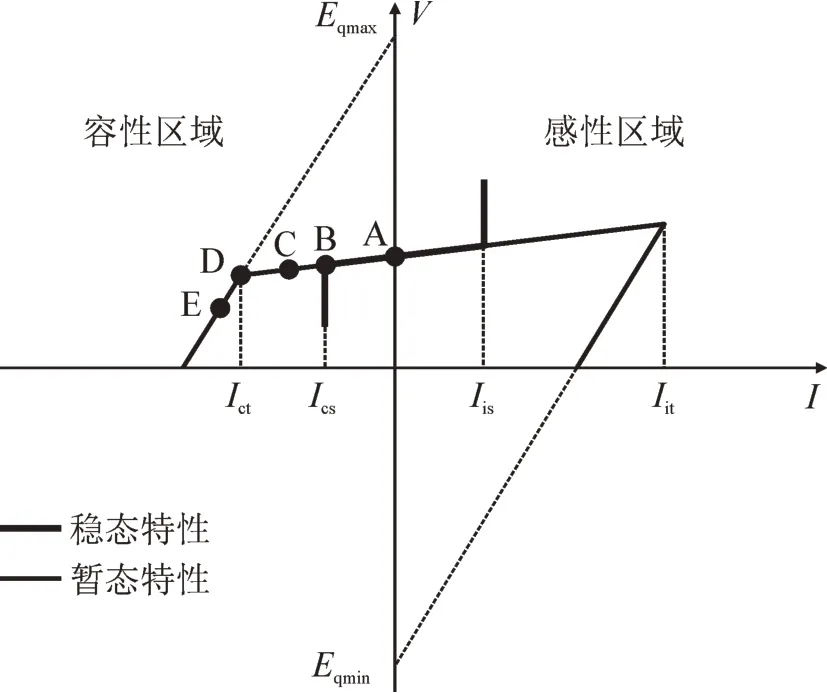
图2 同步调相机的运行V-I特性Fig.2 Operating V-I characteristics of synchronous condenser
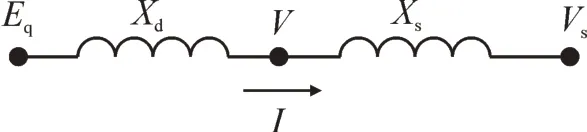
图3 连接到系统的SC的等效电路Fig.3 Equivalent circuit of SC connected to system
从同步调相机到系统母线的电流为
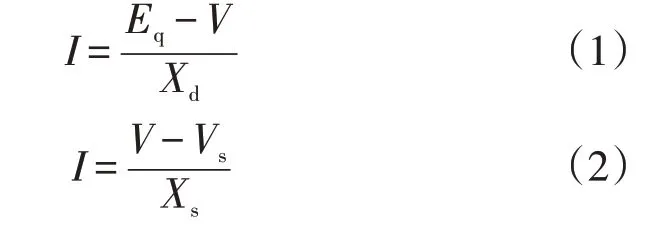
式中:Eq为同步调相机的励磁电压;V为同步调相机的机端母线电压;Vs为系统电压;Xd为同步调相机的等效阻抗;Xs为同步调相机和系统之间的阻抗。
结合式(1)和式(2),得到公式为

同步调相机运行的基本原理是通过在Vs改变时改变Eq来维持机端母线电压V。从式(3)可以看出,当系统电压Vs降低时,Eq将上升;反之当系统电压Vs升高时,Eq将下降。
假设同步调相机的原始工作点在图2 中为A。当系统电压降低时,同步调相机将通过将工作点移向B 来增加Eq并输出更多无功功率。在B 点,电流Ics是额定电容电流,也是同步调相机的稳态极限。如果系统电压继续降低,则工作点将移向C,此时电流将大于Ics。在这种情况下,同步调相机只能工作很短的时间,因为过电流保护将最终使他跳闸。如果系统电压在短时间内进一步下降,SC 仍可以通过增加Eq直到D 点的Eqmax来维持机端母线电压。我们将此时的电流表示为电容性瞬态电流限制Ict。超过D,励磁电压Eq没有更多的上升空间。如果系统电压仍然降低,则机端母线电压V必须降低以平衡点(E)处的公式(3)。同样,在超出B 的任何工作点(例如C,D 或E),同步调相机能否工作取决于过流保护的延迟时间。同步调相机吸收无功功率时的行为可以用类似的方式进行分析。在图2中注意到,同步调相机的暂态电流极限可能大大高于稳态电流极限。
1.2 静止无功补偿器(SVC)的建模
静止无功补偿器(SVC)是最常用的晶闸管控制动态无功功率补偿器。SVC 通常是一个组合系统,其中包含一个晶闸管控制电抗器(TCR),一个电容器组有时还包括晶闸管开关电容器(TSC),见图4(a)。SVC 的无功功率输出限制取决于其最大和最小导纳。与SC 不同,SVC 本质上是一种无源设备,可作为可变导纳运行。通过控制晶闸管的触发角,SVC的导纳从感性变为容性,因此SVC 可以吸收或产生无功功率。SVC 的V-I特性见图4(b)。
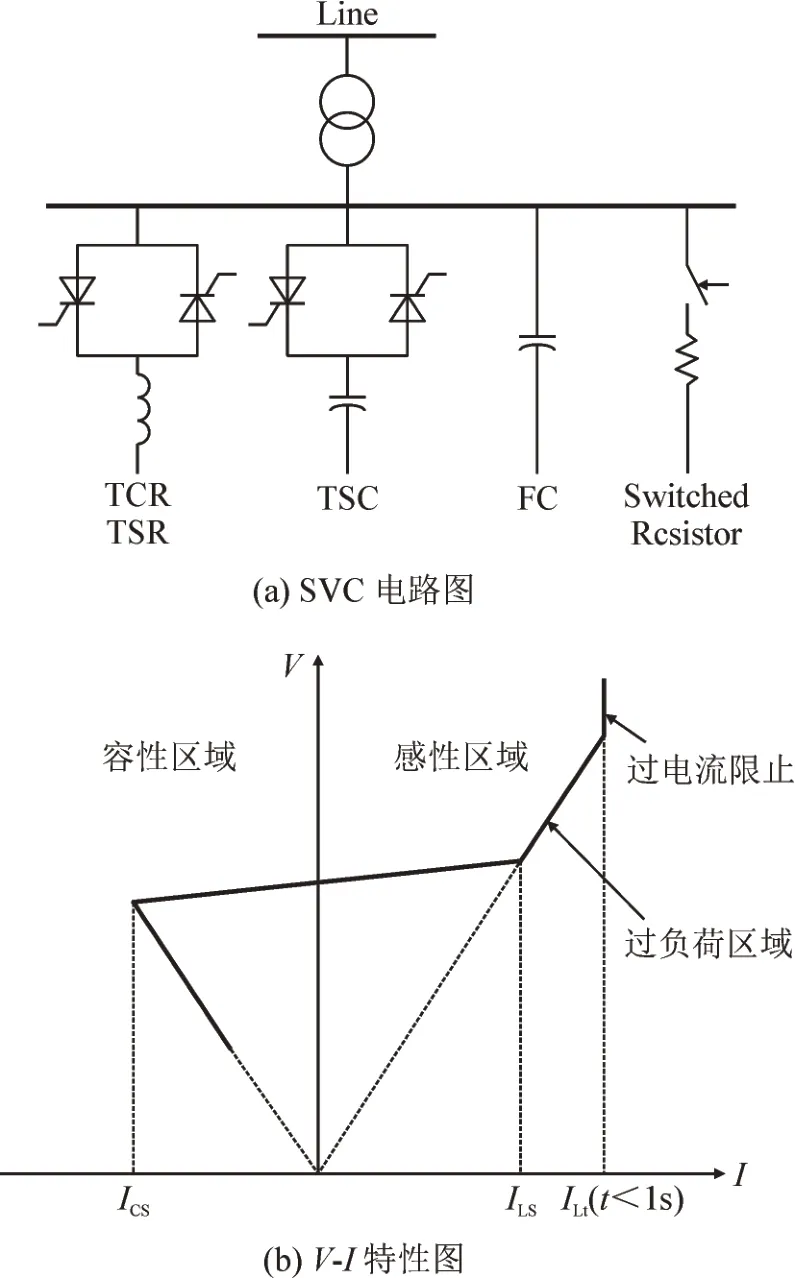
图4 SVC电路和V-I特性Fig.4 SVC circuit and V-I characteristics
当SVC 的无功输出在其控制范围内时,SVC 将保持其控制母线的电压,并且在稳定状态下充当可控电压源。达到无功功率极限后,SVC 将表现为恒定阻抗。其无功功率输出将与母线电压的平方成正比。如果母线电压大大降低,则无功功率输出将大大降低。该特性易于引起无功不足情况下的电压恶化,在极端情况下可能导致电压崩溃,这是SVC 的主要缺点。与SC 不同,SVC 在暂态周期和稳定状态下的极限无功输出都由阻抗极限决定。因此,在暂态和稳态状态下,SVC 的运行极限不会有太大差异。
1.3 静止同步补偿器(STATCOM)的建模
静止同步补偿器(STATCOM)是基于电压源换流器技术的现代无功功率补偿器。尽管他和静止无功补偿器(SVC)一样由电力电子电路构成,但其行为却更像同步调相机(SC)。他实际上是一个完全可控的有源补偿器,见图5(a)。在达到其极限之前,STATCOM 用作可控电压源,以维持其控制母线的电压。STATCOM 的极限是他允许流过其功率电子电路的电流极限。图5(b)为STATCOM 的电压-电流(V-I)特性。当超出其可控制范围时,其无功功率输出与被控制母线电压成正比,而不是与SVC 一样与被控制母线电压的平方成正比。因此即使电压下降到非常低的值,STATCOM 也可以提供其最大电流,仍具相当的能力来支持系统电压,由此提高系统电压稳定性。通常在控制系统中施加STATCOM 的电流限制,例如在DQ 解耦控制中限制Iq的值。稳态和暂态的电流限制通常以相同的机制实现。尽管在某些情况下可以将他们设计为允许一定的短时过电流,但稳态极限和暂态极限之间的差异也不会很大。
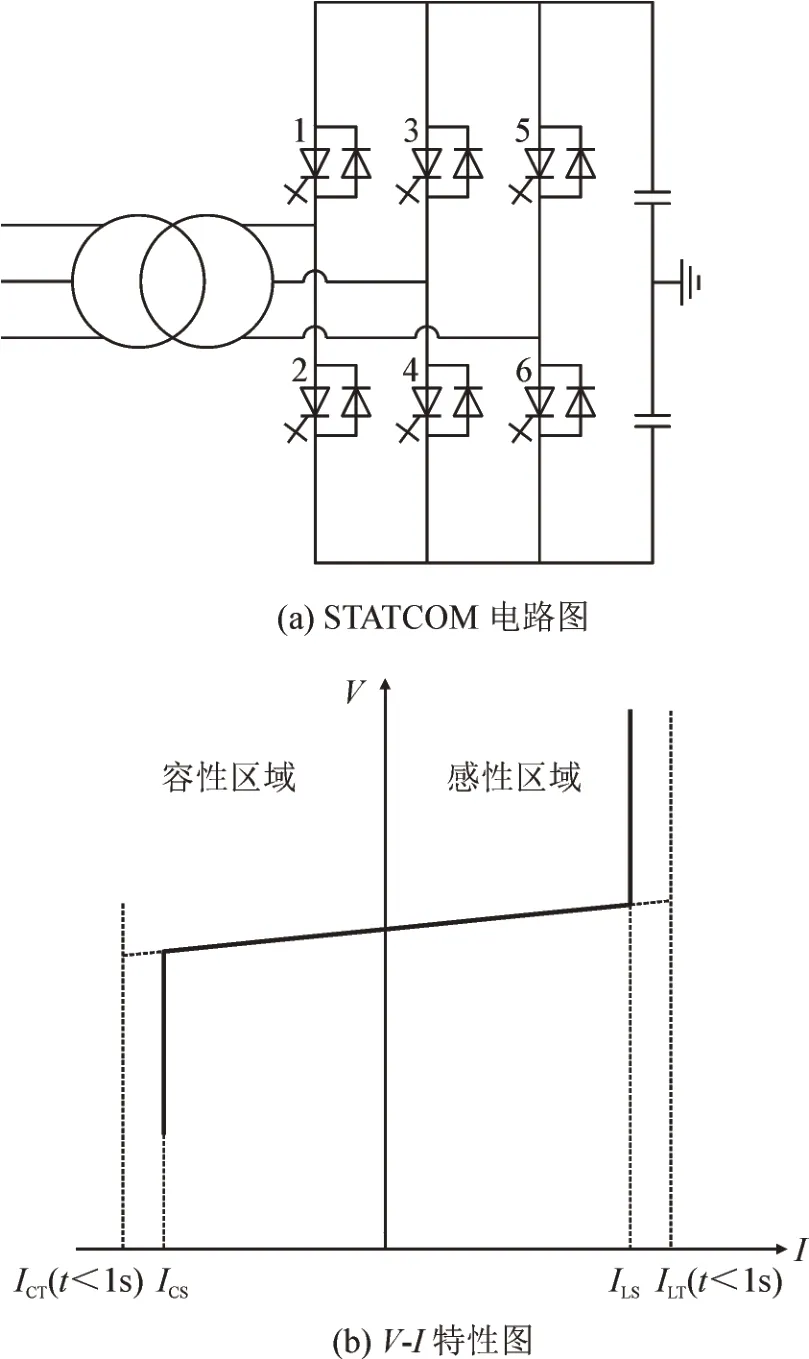
图5 STATCOM电路和V-I特性Fig.5 STATCOM circuit and V-I characteristics
2 增强静态电压稳定性的能力比较
无功功率补偿被广泛用于提高电力系统稳态或暂态的电压稳定性。在稳态电压稳定性分析中,可以通过无功功率补偿来提高最大传输能力Pmax。无功功率补偿如何增加Pmax的机制可以用一个简单的交流系统来解释,见图6。
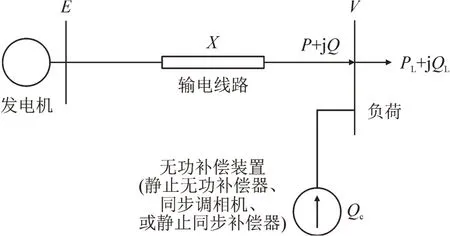
图6 负载侧的无功功率补偿Fig.6 Reactive power compensation of load side
在负荷母线上安装动态无功功率补偿器,如图6中的Qc,可以显著改善电力系统的电压水平和电压稳定性。动态无功补偿器的功能在两个不同的阶段有所不同。在达到其无功功率极限之前,补偿器通过调整其无功功率输出将负荷母线电压控制为恒定值。负荷和系统之间的无功功率交换决定了负荷母线的电压。达到无功功率极限后,负荷母线电压将不能继续保持。根据所用补偿器的类型,理想补偿器、SC/STACOM 或者SVC,其无功功率输出将分别受Qcmax、Icmax或Bcmin的限制。应当注意,在稳态下达到无功功率极限之前,所有类型的补偿器将在相同的电压水平下产生的无功功率是一样的。达到无功功率极限后,即使电压水平相同,不同的补偿器类型也会产生不同数量的无功功率。
传输线受端的P和Q公式为
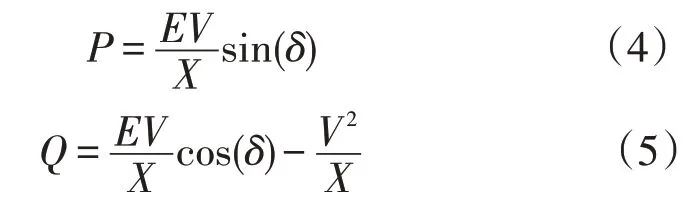
式中:E和V分别为发电机母线和负荷母线的电压;X和δ为发电机母线和负荷母线之间的阻抗和相角差。
功率P与电压V之间的关系是电压稳定性分析中广泛使用的众所周知的P-V曲线。电力系统的最大传输功率可以用P-V曲线来表征。如果我们假设负载具有恒定的功率因数角,P-V曲线的极限点的电压和最大功率Pmax是E、X和Qcmax的函数。E和X是电网的运行和配置参数,不易更改。Qcmax是无功补偿器的极限容量。在图6 的简单电源系统中计算Qcmax对P-V曲线的影响,见图7。可以看出,随着Qcmax的增加,P-V曲线的极限值会增大,这意味着借助无功功率补偿可以传输更多的功率。
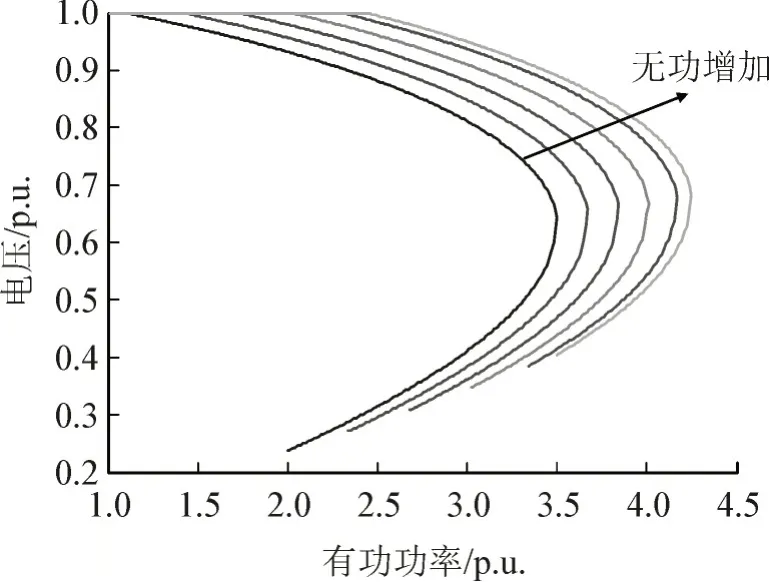
图7 无功补偿增加时的P-V曲线Fig.7 P-V curve with increase of reactive power compensation
Pmax和Qcmax之间的关系可以进一步推导如下。理想补偿器和SVC 情况下Pmax和Qcmax的关系为

对SC 和STATCOM 来说也存在相似的关系,即Pmax是Icmax的某个函数,但是没有简单的解析解。可以通过数值解来获得这个关系,结果介于式(6)和式(7)之间。Pmax与各种无功补偿器的容量之间的关系见图8。图8 中的曲线表明,通过无功功率补偿可以增加最大功率传输。
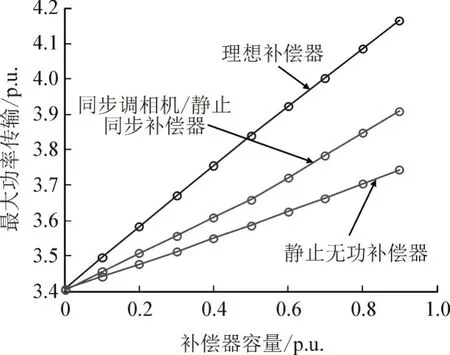
图8 Pmax和无功补偿器容量之间的关系Fig.8 Relationship between Pmax and compensator capacity
3 增强功角稳定性的能力比较
无功补偿器通常安装在远距离输电线的中点,以提高功率输电能力。输电能力就是两个交流系统之间可能达到的最大功率传递,受转子角静态稳定性的限制。与上一节中讨论的从系统到负荷的传输能力不同,上一节中主要受静态电压稳定性的限制。图9 为简单两机系统,无功功率补偿器安装在输电线的中点。假设发送端电压相量为V/(δ/2),接收端电压相量为V/(-δ/2)。
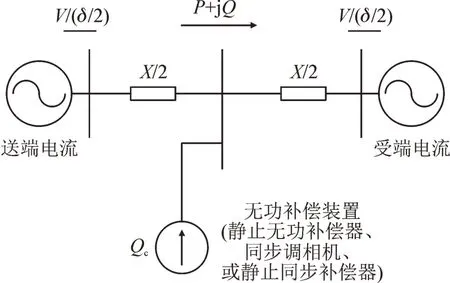
图9 具有中点补偿的两机系统Fig.9 Two-machine system with midpoint compensation
没有补偿时,功率传递为

无补偿的最大功率传输为

当安装动态无功补偿器时,可以将中点电压控制为恒定,然后传输线上的功率流变为

上面讨论的传输限制处于静态的背景下。在达到无功功率极限之前,中点电压被控制为恒定值,对应所有无功功率补偿器的最大功率传输都相同,如公式(10)所示。当无功功率要求超过补偿器的极限时,中点电压将不再保持恒定。不同的补偿器根据降低的电压开始输出不同数量的无功功率。因此,当使用不同的补偿器时,最大功率传输将有所不同。带无功补偿时的功角关系可推导为[17]
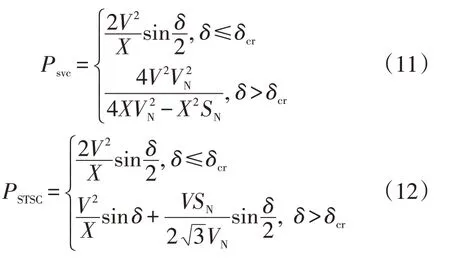
图10(a)和图10(b)示意了图9 所示的输电系统在中点具有不同补偿器的功率角曲线。可以看出,无功补偿增加了最大功率传输,并且补偿器越大,可以传输越多的功率。
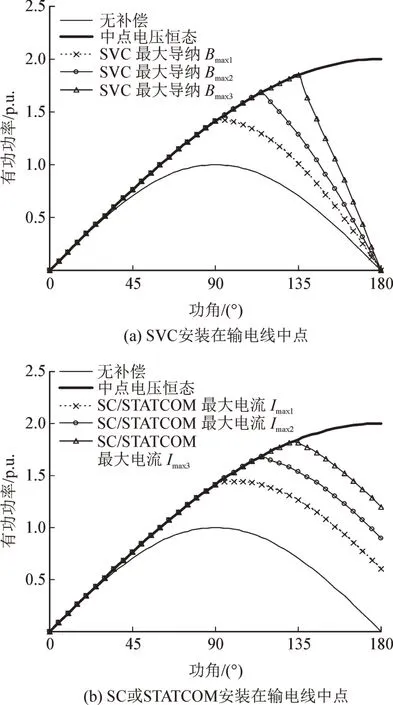
图10 具有中点补偿的输电系统功角曲线Fig.10 Power angle curve of transmission system withmidpoint compensation
图11 展示了不同无功补偿方案时输电系统功角曲线的比较。
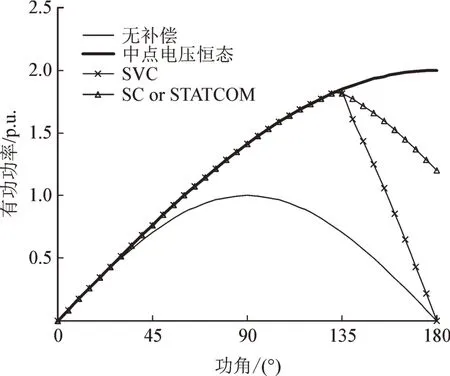
图11 使用不同补偿器的功率角曲线的比较Fig.11 Comparison of power-angle curves by using different compensators
可以看出,对于相同容量的补偿器,在达到无功功率极限之前,对功率传输的影响是相同的。达到无功功率极限后,不同的补偿器会表现出不同的特性。与SVC 相比,STATCOM 和SC 可以带来更多的电力传输。值得注意的是,即使当功率角接近180°时,只要动态无功补偿器有足够大的容量,理论上仍可以实现正向功率传输。
4 动态性能比较
在本节中,使用电磁暂态仿真研究了各种无功补偿器的动态特性。图12 是一个简单的电力系统,可用于比较SC,SVC 和STATCOM 的性能。
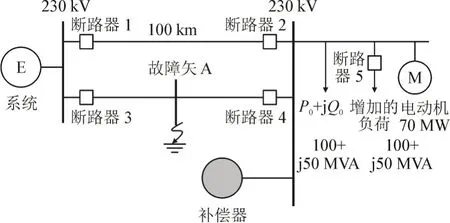
图12 研究的简单电源系统Fig.12 Simple power source system studied
本节中的研究都是通过电磁暂态仿真完成的,不失一般性,无功补偿器的建模选用了典型的控制方式如下:
1)SC 的控制:IEEE AC1 的励磁控制模型[18]。
2)SVC 的控制:文献[19]所述的SVC 控制。
3)STACOM 的控制:DQ 解耦控制[20]。
本节将比较不同无功补偿器在以下故障/运行状况下的动态性能:
1)三相故障。
2)单相故障。
3)负荷增加。
4)线路跳闸。
5)永久断电。
6)短时间失电。
4.1 三相故障
为了比较3 种补偿器的动态性能,在图形2 中双回线其中一条传输线的中间设置了一个三相故障。负荷母线上的电压见图13。可以看出,SVC 和STATCOM 使电压恢复正常的速度相当快,SC 的控制速度较慢,并且电压具有振荡。还可以看出,在故障期间,母线电压在使用SC 时最高,在STATCOM 处第二高,在SVC 处最低。
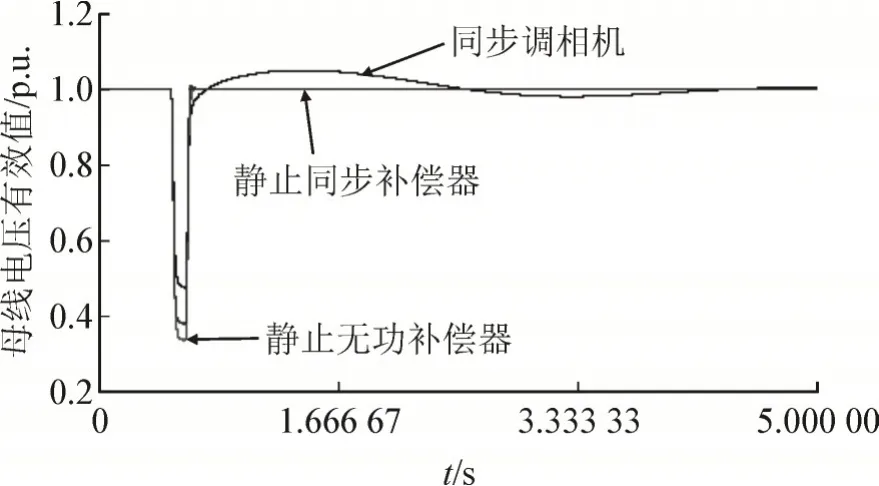
图13 三相故障Fig.13 Three-phase fault
原因是在三相故障期间电压非常低,SC 的短期过电压能力最大,因此在试图将电压控制回正常值时会注入大量无功功率。同时,储存在其转子中的能量被释放,以向电力系统发送一些有功功率。SC 的这些特性会在故障期间导致较高的母线电压。STATCOM 具有一定的过载能力,当电压非常低时,他会注入恒定电流。SVC 不具有电容性过电流能力,其无功功率输出与电压幅度的平方成正比。因此,其在故障期间的无功功率出力最低。
4.2 单相故障
单相故障的负载母线电压见图14。在这种情况下,STATCOM 表现出比SVC 和SC 更好的性能。单相故障是一种不平衡故障,不如三相故障严重,因此导致较少的电压降落。
STATCOM 可以在不达到无功功率极限的情况下迅速使电压恢复正常。因此,使用STATCOM 时电压降非常小。SVC 的响应速度也很快,但是在故障期间电压降最大。SC 的响应时间很慢,并且电压似乎有振荡,这很可能是SC 转子的摆动引起的。图14 显示,STATCOM 具有更好的能力来控制不对称故障的电压。
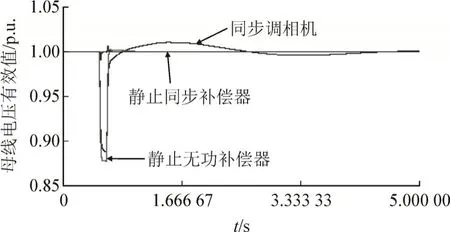
图14 单相故障Fig.14 Single-phase fault
4.3 负荷变化
负荷突然增加时的母线电压见图15。STATCOM在这种大负荷投切扰动情况下表现出的性能最好。与其他补偿器相比,STATCOM 在负荷投切时的响应时间要快得多,并且更加准确。SC 的响应要慢得多,并带来一些母线电压振荡。
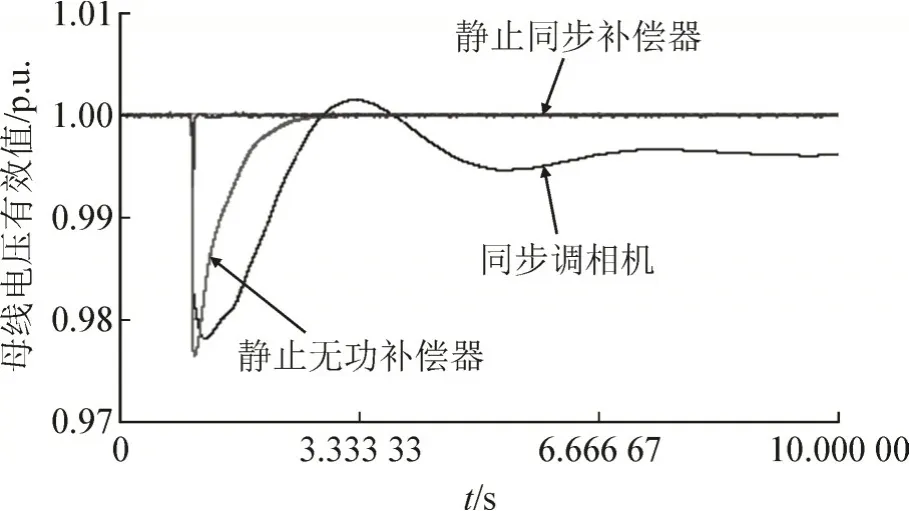
图15 负荷增加Fig.15 Increase of load
4.4 线路跳闸
仿真计算表明,当其中一条传输线跳闸时,母线电压会发生变化,见图16。同样,STATCOM 展示了最快的负荷母线电压调节能力。
4.5 永久断电
当两条传输线同时断开而断电时母线电压的下降动态过程见图17。进行这项比较的原因是确定不同无功补偿器的惯性如何影响整个电力系统的动态性能。结果表明,使用SC 时,电压可以保持更长的时间。当使用SC 时,如果两条线路同时跳闸,电压大约需要2.0 s 才下降到0.5p.u.。这表明,如果可以使用快速备自投或重合闸来恢复供电,则安装SC 将会非常有帮助,因为SC 可以帮助电动机的自启动。该结果还表明使用SC 可以显著提高暂态电压稳定性。
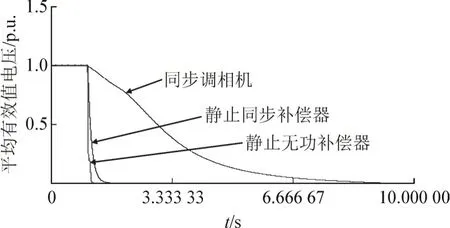
图17 断电时电压下降Fig.17 Voltage drops at power off
SC 的惯性是一个很好的性能,特别有利于无源的受电端断电后的恢复。在这种情况下,如果断电以后重启动,则SC 可能能够将电压保持一段时间,从而提高负荷侧的恢复能力,也就是改善了暂态电压稳定性。另外如果受端系统很弱,没有足够的惯性支撑,SC 将是一个不错的选择,他在提供动态无功功率补偿的同时,可以改善弱受端系统的惯性特性。
4.6 短期断电
负荷母线上的感应电动机可以显示出工业负荷的频率动态以及系统惯性的影响。在如图12 所示系统中,当其中一条输电线停止运行时,如果另一条输电线暂时中断了3 个周期,则负荷将经历三个周期的无电情况。图18 为短期跳闸期间的电动机暂态,显示了使用不同补偿器时电机的有功功率和转速。结果表明,使用STATCOM 或SVC 时,电动机变得不稳定,而使用SC 时,电动机保持稳定。结果表明,在受端系统中没有同步发电机可用时,SC 的惯性起着重要作用。当负荷母线与电网断开时,电动机的速度将下降。SC 的转子中存储了一些能量将释放,有助于保持系统频率,从而使电动机保持稳定运行。该结果进一步确认4.5 节所述,如果系统的惯性不足,选用SC 具有优势。
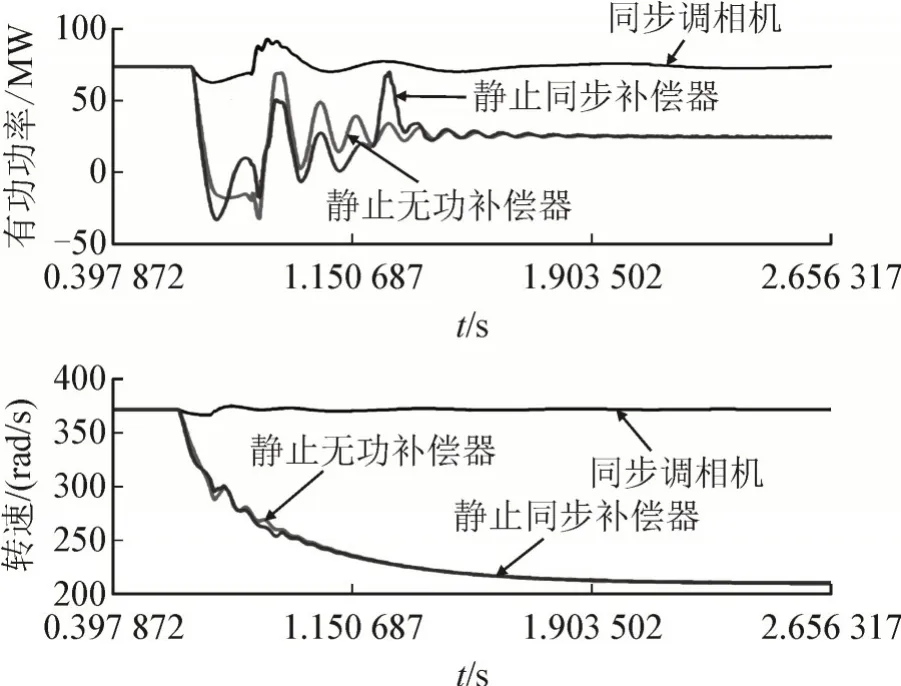
图18 短期跳闸期间的电动机暂态Fig.18 Transient state of motor during short tripping period
4.7 不同补偿器提供的短路电流
本节讨论无功功率补偿器是否提供短路电流的问题。图19 为不同补偿器的故障电流注入图,显示了各种无功补偿器产生的故障电流。只有SC 会产生大量的短路电流。STATCOM 和SVC 不是真实的旋转电机,除了其中的电容器储存少量能量以外,那些电力电子设备中是没有大量的能量存储的。故障发生时,线路和设备中的电阻损耗都会造成功率损耗。SVC 和STATCOM 以在电容器中存储的能量非常有限,很快就被完全消耗,无法长期维持故障电流。而SC 是真正的同步电机,因此在出现故障和干扰时,他可以提供大量的短路电流。所以,SC 可以增加短路容量,STATCOM 或SVC 则不会增加短路容量。但是,SVC 和STATCOM 为交流母线提供电压支持,而且在大多数情况下,SVC 和STATCOM 可提供比SC 更快的电压调节,也就是他们确实增强了系统的强度。这种现象表明,当在电力系统中使用现代电力电子补偿器时,传统的短路容量无法准确地量化系统强度。
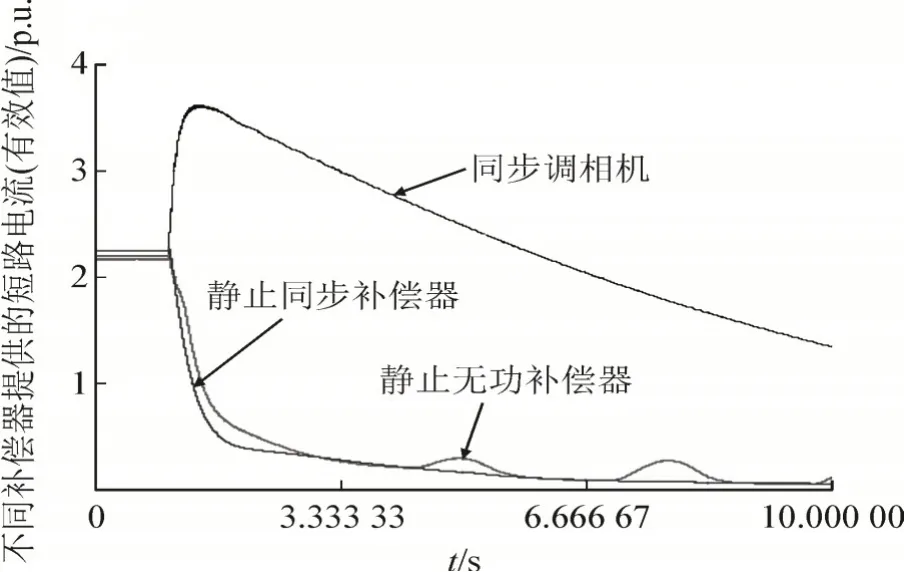
图19 不同补偿器的故障电流注入Fig.19 Fault current injection of different compensators
5 结语
本文研究了各种动态无功补偿方案的稳态和动态能力。本文的结论可以总结如下:
1)研究了无功补偿装置的稳态建模方法,得出了补偿器的稳态无功出力极限。
2)研究了无功补偿在简单传输系统中增强电压稳定性的能力,得出了无功补偿量与最大功率传递能力之间的关系。
3)讨论了无功补偿对转子角稳定性的影响。推导了考虑中点补偿的功率和角度方程的解析解。
4)利用电磁暂态仿真研究了无功补偿器在暂态过程中的性能。结果表明,STATCOM 在大多数情况下提供最佳性能,而当系统惯性不足时,SC 则具有优势。
