基于图像识别的皮带纠偏控制方案的研究
2022-11-03冷东键
冷东键
(国能四川华蓥山发电有限公司,四川 达州 635214)
0 引言
现如今火力发电厂或其它自动化工厂,例如化工、制造、煤矿等工业工厂中,广泛利用传送带输送机进行物料的传送和运输,传送带一般包括输煤皮带、脱水滤布、给料机皮带等。在输送机工作时,由于传送带材质厚薄不均匀,张力不一致,及机械运行偏差会导致传送带在水平方向上出现横向错位,不能保持直线运行。若传送带偏离正常范围,其边沿会脱离滚筒,在电机的巨大拉力下,边沿将会发生折叠,严重时甚至会导致传送带断裂,进而造成人身和设备的重大安全问题,传送带输送机的停滞也将严重影响工厂正常生产流程,带来不必要的经济损失。为解决以上问题,工业中一般采用纠偏控制系统对其传送带位置进行实时的检测和纠正,以保证传送带正常运行,提高产品质量和整个生产线的自动化水平[1]。
纠偏控制系统一般由跑偏检测器、纠偏控制器和执行机构3部分构成,跑偏检测器用于检测传送带的跑偏情况,将跑偏信号传送给纠偏控制器,执行机构接收控制器信号执行纠偏操作。其中,跑偏检测器位于整个系统的最前端,起到关键性作用。其准确性和稳定性直接影响后续控制、执行情况。针对不同类型的传送带及不同使用环境,采用不同形式的跑偏检测方法,然而检测效果层次不齐,不少工厂在特定场合使用的跑偏检测器还存在一定缺陷,从而影响了整个纠偏控制系统的性能。跑偏检测器仍有很大的发展和研究空间[2]。
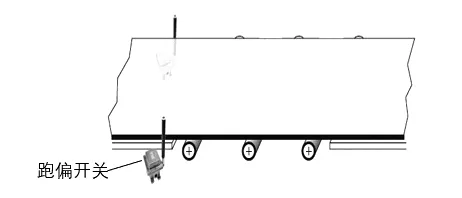
图1 机械式开关检测 Fig.1 Mechanical switch detection
1 国内外发展现状
目前国内大多数工业场景中,纠偏控制系统采用的是接触式的机械式限位开关,即行程开关,能够起到简单的跑偏检测作用,对此技术方法的研究国内已做得非常成熟。例如,安徽海螺建材设计研究院申请的专利《一种大功率胶带输送机的控制方法和系统》(公开号CN111453340A),公开了一种获取胶带跑偏位移进行报警的方法。国内针对非接触式跑偏检测也有相应的研究,例如,西安帝凡合赢科技发展有限公司申请的专利《一种防跑偏装置》(公开号CN111127951A),公开了一种基于位移传感器的车辆行驶位置的检测方法。以上专利把跑偏检测和纠偏方法设计的非常优良,但机械式跑偏开关或位移传感器,不能有效用于恶劣工况环境下的皮带纠偏。
国外针对工业中非接触式跑偏检测方法的研究,主要涵盖了一些传感器的运用,包括红外线传感器、磁感应传感器、超声波传感器、可见光传感器等。例如,德国的“E+L”公司、日本的三桥公司、意大利的Selectra公司等研发的纠偏控制系统采用了传感器技术,具有较高的纠偏精度、响应速度和工作稳定性。而进口纠偏控制系统有诸多缺点:结构复杂,维护不方便,故障率并不低。国内对这方面的研究起步较晚,主要采用进口纠偏控制系统,实际应用于工业生产也不多。其检测原理都是通过信号调理器检测进光量、磁通量或声波强度,将信号传输至控制器进行判断。为了配合信号调理器检测功能,传感器的安装位置有一定要求,且容易受到环境干扰产生误差,亦不适用于恶劣工况环境[3]。
随着科技和互联网的高速发展,人工智能、大数据、云计算、物联网等技术迅速崛起,人类生活逐渐走向智能化、数字化。人脸识别等图像识别技术在当今运用非常广泛,若将图像传感器引入纠偏控制系统,替代跑偏检测器,实现智能化控制,则将有助于提高国内传送带输送机在恶劣工况环境下的运行效果。下面介绍常见纠偏控制系统与图像识别纠偏方案的研究及对比。
2 常见纠偏控制系统介绍
2.1 纠偏控制系统原理
前面介绍了纠偏控制系统的构成,下面以简单的给料机皮带为例,机械跑偏开关既是跑偏检测器,又是纠偏控制器,用于检测皮带的左右偏移,如图1。皮带向某一方向偏离后,触发相应跑偏开关发出电信号,控制后端执行机构。电信号控制继电器驱动压缩空气电磁阀动作,电磁阀控制相应纠偏气缸充气和排气,改变滚筒水平方向角度,带动运行中的皮带回正,达到实时纠偏的目的,如图2[4]。

图2 纠偏执行原理Fig.2 Execution principle of deviation correction
2.2 机械式跑偏开关的缺点
机械跑偏开关一般为角行程式,其触碰杆直接与皮带边沿接触,摩擦力大,容易产生形变,较为细长的触碰杆容易振动和弯曲,造成开关触发不稳定。而在脱水车间等高腐蚀环境下,金属型触碰杆容易锈蚀卡涩,同样会造成开关拒动或误动;另外,跑偏开关在长期使用过程中,机械的触发方式决定了其灵敏度也会逐渐降低。跑偏开关若发生失灵,会导致皮带无法正常纠偏。
2.3 非接触式开关的适用性分析
面对上述问题,当前工业一般通过用两种常见的非接触式开关替换机械式开关。一是磁感应开关,利用磁感应探头发出信号进行控制,但需要在皮带上加装磁铁或在铁片,难度较大,一般不具备安装条件;二是红外射线开关,通过检测红外线进光量的方法进行判断,但由于开关安装距离皮带较近,其浆液、煤粉、粉尘容易堵塞光源和检测器,造成误判;另外,超声波传感器、可见光传感器类似于红外射线开关,近距离安装仍有上述弊端,安装也颇为不便。在工况环境良好的条件下,非接触式开关较机械开关具有一定优势,更换周期更长,但是往往皮带传输的工况环境极其恶劣,不太适合使用这种近距离的非接触式开关。
3 图像识别控制方案的研究
3.1 图像方案原理
为解决上述技术问题,结合人工智能技术特点,研究一种基于图像识别的智能皮带纠偏控制系统,将监控装置采集到的图像传输至电脑进行分析处理,通过特定程序算法,模拟人眼观察,判断皮带位置,发现皮带偏离正常范围之后,配合相关模块立即发出控制信号控制相应的机械传送装置进行纠偏调整,使皮带回归正常位置。这种远距离的检测控制方式,特别适用于输煤皮带机、脱水皮带机等恶劣工况环境[5]。
3.2 图像方案硬件结构
整体结构包括:1-控制器;2-光耦隔离继电器模组;3-监控装置;4-气动控制箱;5-纠偏气缸;6-纠偏滚筒;7-皮带;8-固定端。控制器分别连接监控装置和继电器模组,控制气动箱中电磁阀动作,驱动气缸伸缩,从而改变滚动角度。各部件连接如图3。
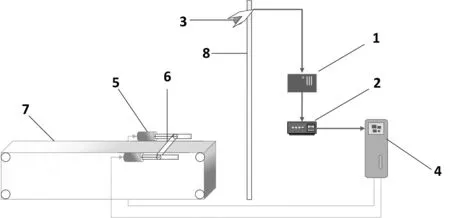
图3 各部件安装结构示意图Fig.3 Schematic diagram of the installation structure of each component
实例中,监控装置采用分辨率达到720P、帧数达到30fps的基于CMOS传感器的工业高清摄像头,同时设有IR-CUT双滤光片,具备夜视功能,能够根据外部光线的强弱随之自动切换滤镜,满足高、低亮度光线环境的要求,提高成像质量。监控装置安装在固定端上,与皮带有一定距离,可避免粉尘、浆液、水汽等附着于摄像头镜片,影响成像。固定端可以使图像采集稳定,避免图像抖动、模糊。控制部分和驱动纠偏部分安装于控制箱内,降低了工厂中某些恶劣环境对控制器的影响,有效避免在实际工况环境下设备使用时间较长时,造成驱动控制灵敏度下降的问题[6]。
控制器采用型号为Raspberry Pi 3b+的树莓派单板电脑,相对于普通计算机有功耗优势,对于单片机又有性能优势,其通用性强,响应和处理速度快,具有GPIO接口可直接输出控制信号。光耦隔离模块有效隔离强电冲击,保护控制器不受损坏。光耦隔离连接继电器输出,采用5V低电压继电器控制外部电磁阀动作,提高了系统的稳定性。控制部分电路图如图4[7]。

图4 控制部分电路图Fig.4 Circuit diagram of the control part
控制部分的硬件放于控制箱中,实物图如图5,从左往右分别为工业摄像头、光耦隔离继电器模组、单板电脑。

图5 控制部分实物图 Fig.5 Physical map of the control part
3.3 图像识别的软件算法
单板电脑树莓派安装好Linux系统及OPENCV运行库,编写C++或Python代码并执行。程序配置完摄像头后获取视频流,30帧的视频每秒可以获取30个画面,以便更密集和快速地计算;灰化图像和高斯模糊使图像黑白化和蜕化,清晰度提高;边缘检测是通过设置黑白的高低阈值提取需要的边缘信息;边缘膨胀化可填充凹凸边缘,使边缘连贯平滑;遍历闭合区域是将所有闭合区域查找出来,通过设定区域面积大小来判断闭合区域,可确定并画出皮带在画面中的轮廓;画标准点是根据画面中皮带的具体位置,人为设定两个绝对坐标而划定皮带跑偏边界,而判断坐标是否在皮带轮廓之内;分组取值是通过每10个或多个为一组来计算一个标准点落入轮廓的概率,概率在90%及以上且另一个标准点在轮廓外,则判断皮带向左或向右跑偏,这样可以起到软件消除误差的作用;GPIO输出为引脚高低电平输出至光耦继电器模组,完成控制。具体算法图如图6[8]。
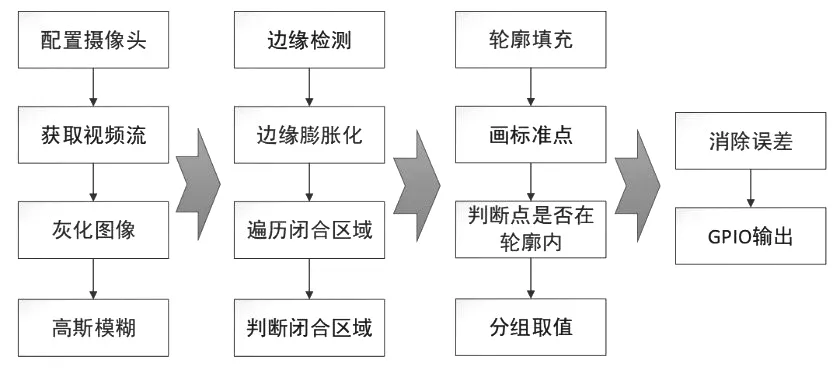
图6 程序算法图Fig.6 Program algorithm diagram
以上算法需根据图像实时状态和实际需求进行调试,设定各个步骤的相关参数,达到最佳的纠偏动作效果。实例中,脱水滤布或皮带识别的轮廓用红色线填充显示,左右标准点用黄色填充显示。识别效果如图7,滤布向右偏移,左标准点在轮廓外,右标准点在轮廓中,此时控制器判断滤布向右偏移,发出向左的纠偏控制信号。纠偏完成后识别图如图8,左右标准点均在轮廓之外,控制器不发出纠偏信号,滤布正常运行。

图7 滤布向右偏移Fig.7 The filter cloth is shifted to the right

图8 滤布回正Fig.8 Filter cloth back to normal
对于不同皮带的纠偏识别判断,通过调整监控装置至合理位置,改变控制器算法参数:大面积的识别需要设大闭合区域面积,小面积皮带识别反之亦然,光线变化时调整灰化、模糊的强度,边缘检测的阈值等,则可以达到相同的识别效果和判断目的,而不受皮带面积大小和位置的影响,具有很强的适应性。
3.4 图像方案效果
通过新方案的设计,硬件安装、软件调试和效果验证,本套装置成本低廉,效果良好,安装在华蓥山电厂#1脱水皮带机上投运一年以来,脱水皮带装置运行可靠性大幅提升,纠偏装置拒动和误动风险明显降低。脱水皮带跑偏开关问题得到根治,减少了机械跑偏开关更换频率,提高了生产效率,节约了维修和更换滤布的成本,同时减少了检修人员的维护工作量,保障了人身和设备安全。
3.5 方案改进与简化
本方案仍有优化和改进的空间。在生产车间或室外现场的墙面、固定支架上,通常安装有高清监控摄像头,工作人员在控制室可通过上位机显示器远程监视设备运行状况。在光线满足的情况下,或将摄像头更换为IR-CUT双滤镜型,将监控摄像头按上述方案调整安装位置,正对皮带运行部位,使获取的图像满足识别要求,则无需单独加装专用摄像头和核心控制器,直接通过监控上位机进行纠偏控制。
上位机远程控制的方法进一步减少硬件结构和成本,仅需增加控制电缆长度,而高清监控设备通常具有1080P或更高的分辨率和帧率,上位机微型计算机亦具有更快的处理速度。此设计方法更多集中在软件层面,各厂家的监控设备软件一般具备开放的API接口和SDK软件开发包,方便用户二次开发和接入,程序实现方法和上述方案一致,纠偏控制效果可进一步提升[9]。
4 总结
图像纠偏控制方案的研究及应用以国家能源集团华蓥山电厂为基础,用以改装脱水滤布跑偏开关,提高脱水皮带运行的可靠性和脱水效果,有效杜绝了跑偏开关拒动和误动的风险。本方案具有判断精准,安全智能,使用寿命长,功耗低,成本低的特点。研究成果可用于电厂输煤皮带,给料机皮带,亦可用于化工、制造、煤矿等行业的传送带纠偏。本方案的改进与简化形式,合理利用现场监控装置,可达到更高的使用价值和运行效果。方案可在纠偏控制系统厂家及相关工业企业进行推广,提高传送带纠偏控制系统的运维水平。
