基于SHOT特征描述子的自动提取球形标靶方法研究
2022-11-02郑德华刘存泰程宇翔
王 浩,郑德华,刘存泰,程宇翔,胡 创
基于SHOT特征描述子的自动提取球形标靶方法研究
王 浩,郑德华,刘存泰,程宇翔,胡 创
(河海大学地球科学与工程学院,江苏 南京 210098)
针对复杂场景下的三维激光点云球形标靶精确自动化提取问题,提出了一种基于SHOT特征的自动精确提取球形标靶的方法。该方法设计了粗提取和精提取处理过程,粗提取过程首先采用SHOT特征描述子提取场景内全部的球形标靶点云;其次,利用欧氏聚类分割球形标靶点云,并采用最小二乘方法计算球形标靶的粗略参数。精提取过程依据迭代最小二乘方法和法向滤波剔除非球面点,得到球形标靶点云和精确的球形标靶参数。设计了含有4个球形标靶的实验场景,使用德国Z+F Image 5016扫描仪进行场景数据采集,自动提取得到实验场景中的球形标靶点云和球形标靶参数。结果表明,在10 m范围内,该方法自动提取的球形标靶半径中误差为0.25~0.33 mm,较人工提取球形标靶点云的半径中误差减小0.02~0.06 mm,较基于微分方法减少0.01~0.09 mm;该方法能够得到较高的球形标靶定位精度和稳健地去除场景点云中的噪声,可在30 s内完成百万级点云球形标靶的自动提取任务。
球形标靶点云;SHOT特征描述子;迭代最小二乘;欧氏距离聚类;法向滤波
地面三维激光扫描技术可以对物体进行全方位、多角度、无接触的自动化扫描,得到物体表面一系列点的三维坐标和其他物理属性[1];点云配准是点云处理中的关键步骤,能够得到完整场景的点云。点云配准可分为基于特征的配准和无特征的配准[2];无特征的配准方法主要采用迭代最近点算法[3](iterative closest point,ICP),存在运算量大、依赖初始配准结果的问题。基于特征的配准方法主要采用以球形或平面标靶作为匹配特征,辅助点云配准[4-5]。其中,球形标靶具有各向同性、配准精度高等特点,在点云配准方面有着广泛地应用[6]。随着三维激光扫描技术的发展,点云的获取越来越容易,但是基于球形标靶的点云配准的自动化水平还不成熟。其中,从点云场景中提取球形标靶的自动化技术是提高基于球形标靶的点云配准自动化水平的关键;自动提取球形标靶并得到可靠的球心坐标和半径对点云的后续处理有着重要的影响。
目前,国内外学者对球形标靶点云的自动化提取方法开展了较为全面地研究。王利华等[7]针对球形标靶边缘完全暴露情况,通过距离突变发现疑似球面边缘点,并采用随机采样一致性(random sample consensus,RANSAC)算法探测球面边缘的近似圆结构,根据半径和圆形区域内点云得到球形标靶模型。张立朔等[8]针对简单场景球形标靶,提出利用点云反射强度图像分割和随机采样一致性算法剔除错误点的球形标靶提取方法。蓝秋萍等[9]提出采用点云法向量和曲率得到球心位置以及球心点互斥算法探测场景中球形目标点云,该方法存在易受噪声影响的问题。魏江等[10]采用计算点的k邻域的法向及其延长线得到球面点,通过球面数据点沿法向平移半径距离确定球心,由于受到噪声、点云密度等因素影响,该方法的自适应性较差。FRANASZEK等[11]提出采用三点滤波确定候选球面的中心点,根据测心坐标、激光扫描角和球体几何关系大致计算球形标靶参数;该方法的采集区域较大,易受噪声的影响。李嘉等[12]基于点云微分属性和非监督分类方法自动提取复杂场景中未知球形目标,并采用最小二乘原理拟合球形目标。SALTI等[13]提出了适用于目标识别和点云配准等方面的基于局部坐标框架下的SHOT (signature of histogram of orientation)特征描述子。张凯霖和张良[14]提出一种将点云纹理直方图与形状直方图融合成C-SHOT描述符特征的3D物体识别方法,识别复杂点云中的多个目标,通过搜索场景和模型的C-SHOT对应点,并采用霍夫投票机制完成多目标识别。
针对上述问题,为了从复杂点云场景中稳健地提取出球形标靶目标,得到高精度的球形标靶参数,本文提出基于SHOT特征的球形标靶粗提取和迭代最小二乘与法向滤波结合的精提取方法,实现球形标靶的自动化提取。
1 球形标靶自动提取的基本思路
本文设计的球形标靶自动提取过程,如图1所示。整个过程分为粗提取获取球形标靶的大致位置和精提取获取球形标靶的精确参数两部分。粗提取分别对场景点云和模型点云提取关键点,并计算关键点的SHOT特征描述子,利用KD树(K-dimension tree,KDTree)搜索模型点云关键点的对应点,通过欧氏聚类将场景中多个球形标靶分割开来,采用最小二乘拟合获取球形标靶的粗略参数。精提取根据粗提取得到的球形标靶参数获取球形标靶的全部点云,然后采用迭代最小二乘(iterative least squares,ILS)滤波和法向滤波获取准确的球形标靶球面点,得到球形标靶的自动提取结果。

图1 球形标靶自动提取过程图
2 球形标靶自动提取方法
2.1 球形标靶粗提取方法
计算点云表面之间的相似程度是点云目标识别和配准的关键,通过匹配具有局部特征的点云特征描述算子,可以有效地处理诸如遮挡、杂乱和视点变化等问题,并解决3D目标识别和位姿估计问题[15]。基于局部特征的球形标靶自动提取主要包括:关键点选取、局部特征描述子建立、局部表面特征描述子匹配以及球形标靶的分割和拟合。
选取合适的局部特征描述子是球形标靶自动提取的关键,局部特征描述子有快速点特征直方图描述子(fast point feature histograms,FPFH)、3D形状上下文描述子(3D shape context,3DSC)、旋转投影统计描述子(rotation project statistics,RoPS)和方向直方图签名描述子(SHOT)等;基于学习的特征描述子,例如D3Feat和FCGF等,对点云中的旋转不变特征提取效果有限。FPFH 构建两点及其法向量之间几何关系形成的四维特征作为点对特征。3DSC采用一种基于形状轮廓的特征描述方法,对于轮廓不明显的目标识别效果较差。SHOT特征描述子是一种基于局部特征的描述子,在构建的局部参考框架内,统计特征点周围的拓扑特征,将邻域点的法线特征信息保存在直方图中,并进行归一化。SHOT特征描述算子具有旋转和平移不变性[13],同时对点云密度和噪声具有鲁棒性,广泛应用于目标识别和点云配准等领域。
2.1.1 基于SHOT特征描述子的球形标靶识别
(1) 点云关键点提取。均匀采样保留三维体素栅格中距离体素中心最近的点作为采样点,不改变点云的表面几何特征,使得后续计算的特征描述子符合真实表面的几何特征。均匀采样关键点提取主要思路如图2所示,首先创建一个场景点云的最小包围盒,然后设置合适的体素栅格边长,将最小包围盒分解成个体素栅格,保留包含数据点的体素栅格;在每个体素栅格中,将距离体素栅格中心最近的点作为关键点。该方法简单实用,可快速获取点云关键点,同时能够保留点云表面的几何特征。

图2 均匀采样提取关键点示意图((a)最小包围盒;(b)栅格化;(c)采样结果)
体素栅格的边长是均匀采样的关键,通过设置合适的体素栅格边长,得到保留点云表面几何特征的简化点云。当较大时可导致点云的局部信息丢失;而较小时能较好保留局部信息,但提取关键点的效果不明显,如图3所示。针对点云场景密度差异大,采用参数测试的方法获取最优参数。
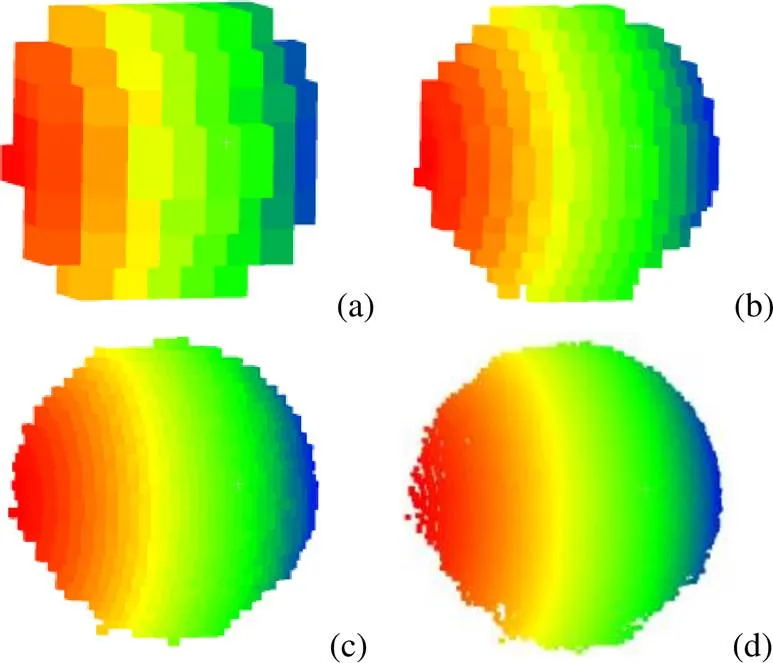
图3 均匀采样体素栅格边长的影响
(2) SHOT特征描述子计算。SHOT局部特征描述子融合了几何分布信息的鲁棒性和直方图统计信息的特异性,具有可重复检测性、旋转不变性和尺度不变性[16]。SHOT特征描述子的实现过程是:建立邻域点局部坐标系,将邻域空间划分为32子空间,统计子空间的法向特征直方图,将32个子空间的直方图组合得到SHOT特征描述子。主要步骤如下:
步骤1.按式(1)求解关键点半径邻域内的加权协方差矩阵,即

其中,为邻域半径;d为第个点到特征点的距离;为邻域中心点。
对协方差矩阵进行特征值分解,得到从小到大排列的特征值和对应的特征向量,依次分别为局部参考坐标系的轴和轴,轴方向向量的共线向量。局部参考坐标系3个坐标轴方向的确定方式为:轴方向与半径邻域法向均值的方向相同;轴正方向为指向点云密度大的方向;轴方向符合右手定则。
步骤2. 直方图统计编码。根据局部参考坐标系,特征点的球邻域沿径向划分为2、方位角方向划分为8和高度方向划分为2,总共32个子空间。球形域在方位角方向划分为4部分,如图4所示。

图4 球形域划分示意图
分别统计每个子空间内邻域点法向和轴夹角余弦值,并划分为11 个区段,32个子空间组合即得到SHOT描述子,长度为32×11=352。其中,邻域点法向与轴夹角余弦的关系为


步骤3. 四线性插值。为了减弱SHOT特征描述子边缘效应的影响,采用四线性插值方法修正直方图和子空间边缘点,即对处在边缘上的点,将其计数分摊到2个相邻的区间内。对于同一个子空间,将法线夹角余弦维度进行插值统计,如图5所示。插值过程中,将边缘点夹角余弦值与当前单元格差值进行归一化得到d,局部直方图单元格频数增量为1–d。同理,在半径方向、方位角方向和高度方向插值与之类似。
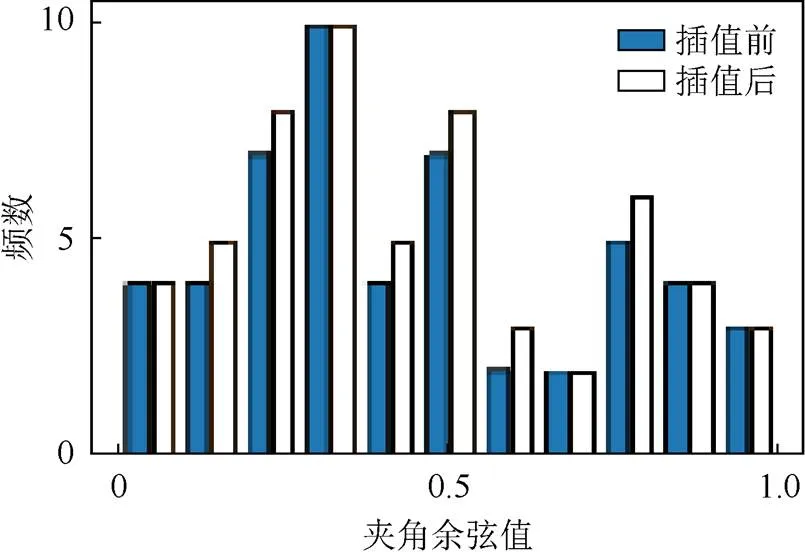
图5 法线夹角余弦插值对比图
插值完成后得到352维特征向量,为了保证特征向量的鲁棒性,对特征向量进行归一化,得到该特征点的SHOT特征描述子,如图6所示。

图6 SHOT特征描述子直方图
(3) 特征描述子匹配。针对特征描述子的高维特征,采用适合高维空间最近邻搜索的KDTree进行特征匹配。利用2个特征向量间的欧氏距离衡量相似性,通过设定合适的阈值获取球形标靶模型关键点的对应点。
KDTree是组织管理k维空间数据的一种平衡二叉树结构,主要应用于高维空间数据的近邻搜索。通过建立模型特征点SHOT特征向量的KDTree,获取小于距离阈值的对应点,即
其中,d=||(1,2,···,352),(1,2,···,352)||为2个特征向量的欧氏距离;dis为SHOT特征距离阈值。
2.1.2 球形标靶分割与拟合
(1) 球形标靶分割。场景中球形标靶的布设一般呈均匀分布,在空间上保持一定的距离,且每站有3个及以上可见的球形标靶。针对场景中含有多个球形标靶,同时存在少量错误匹配点的情况,采用适用目标空间分布离散且计算复杂度低的欧氏聚类算法将球形标靶分类;通过设置合适的最小聚类阈值和聚类间距离阈值,将少量错误识别的非球面点删除,得到不同球形标靶点云的聚类结果。设计了欧氏聚类分割过程,如图7所示。具体实现步骤如下:
步骤1. 建立空的点云聚类集合,空队列,设定聚类间距离阈值;
步骤2. 将任一点加入聚类集合和队列中,搜索的半径邻域;
步骤3. 将半径邻域内的点加入聚类集合和队列中,删除队列中的点;
步骤4. 选择队列中的任一点,重复步骤2和步骤3;
步骤5. 当队列中的元素为空时,完成当前聚类的识别;
步骤6. 将剩余点云重复上述步骤,直到全部点云分类完成。

图7 欧氏聚类分割过程示意图
(2) 球形标靶拟合。对聚类得到的点云采用最小二乘法拟合球形目标,求解球形目标参数,拟合球形的线性误差方程为

求解得到参数,,和,则球形标靶的球心坐标和半径分别为

其中,(0,0,0)为球心坐标;为球半径;,,和为最小二乘参数。半径中误差为
其中,||p-S||为数据点p到拟合球心S的距离;为拟合球半径;为拟合球形的数据点数量。半径中误差表示数据点到拟合球面距离平方和的均值的平方根。
2.2 球形标靶精提取方法
依据最小二乘拟合得到的球形标靶参数,获取包含一定非球面点的球形标靶点云。为了获取球形标靶的准确参数,需要对球形标靶点云进行滤波处理。球形标靶点云可以分为球面点和非球面点,非球面点在空间距离和法向上与球面点有着显著的差异。针对拟合过程中半径误差大于极限误差的点,通过迭代最小二乘法的方法进行去除;利用法向滤波去除由于球形标靶表面不平整产生的误差点和球形标靶边缘的混合像元点[17]。
2.2.1 迭代最小二乘法滤波
在球形标靶点云中,以三倍中误差作为偶然误差的极限误差,当某点的半径误差大于极限误差,则判为非球面点。采用迭代最小二乘法滤波去除球形标靶点云中半径大于极限误差的点,得到拟合残差分布,如图8所示。经迭代最小二乘法滤波后点云,数据分布特征符合正态分布。迭代最小二乘法滤波的主要步骤如下:
步骤1.对球形标靶点云进行最小二乘球形拟合;
步骤2.剔除大于极限误差的数据点;
步骤3.重复步骤1和步骤2直到点云数量不发生变化;
步骤4.得到球形标靶点云迭代最小二乘滤波结果。
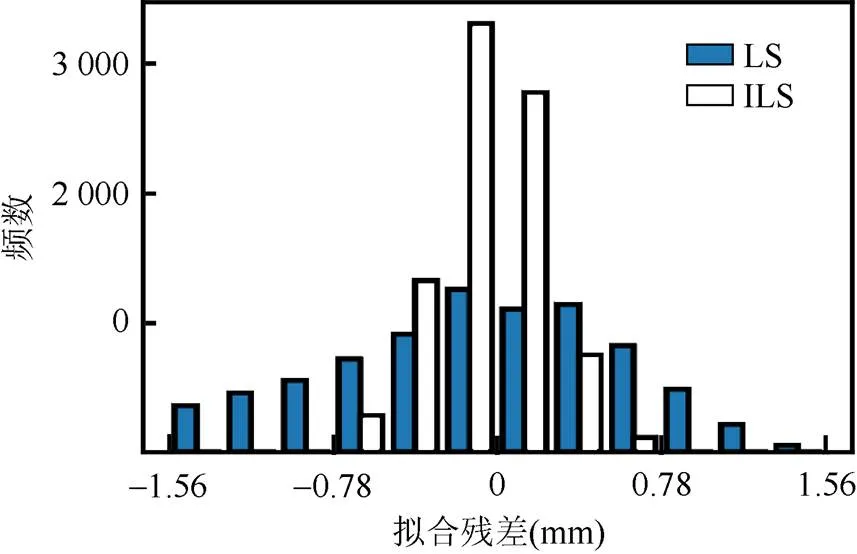
图8 迭代最小二乘拟合残值对比图(3s=0.78)
2.2.2 法向滤波
针对球形标靶边缘的混合像元点,采用法向滤波进行剔除。在球形点云中,球面点的法线与球心指向球面点的向量共线,混合像元点的法向会产生一定的夹角,通过设置合适的角度阈值去除混合像元点,如图9所示。法向滤波的主要步骤如下:通过设置合适的邻域点集,得到球形标靶点云的法线;计算法向与球心到该点向量的夹角余弦值,通过设置合适的阈值,得到去除混合像元点的球形标靶点云。
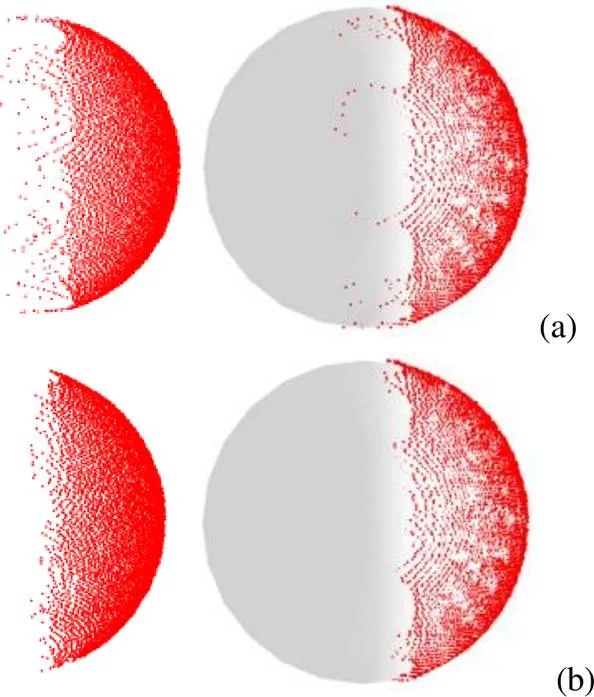
图9 法向滤波去除混合像元点结果对比图((a)混合像元现象;(b)去除混合像元结果)


为了降低噪声的影响,将式(8)中引入距离权修正协方差矩阵。在散乱点云中,邻域点集中距离点越近的点对法线估计的影响越大,距离越远的点对法线估计的影响越小,因此协方差矩阵可修正为

其中,为搜索邻域点集时的球半径;d为邻域点到点的距离。
改进后的协方差矩阵是对称半正定的,通过对角化协方差矩阵,获取协方差矩阵的特征值(1,2,3)和对应的特征向量(1,2,3),其中最小特征值3对应的特征向量3就是该点的单位法向。经过距离加权改进所得到的法向较传统法向有显著的改善,如图10所示。

图10 传统法向与距离加权法向对比图((a)传统法向;(b)距离加权法向)
球面点的法向与该球面点指向球心的向量共线,采用式(10)得到小于法向角度阈值的球面点


3 球形标靶自动提取实验
3.1 实验概况
在室外布置的实验装置如图11(a)所示,场景中在上、下、左和右侧位置各布设一个球形标靶,分别编号为球形标靶1,2,3和4号;其中1号球形标靶设置为国产球形标靶,2,3和4号球形标靶设置为仪器原装球形标靶。选取1.2 m×1.0 m的平面板为底板,下部底座装有2个固定方向轮及2个可锁定万向轮,以方便移动。利用德国Z+F Image 5016三维激光扫描仪在距离10 m的位置进行扫描,其扫描点云共计1 027 060个点,如图11(b)所示。由图可见,点云场景中包含大量的噪声数据,甚至出现少量的错误点。

图11 实验装置和原始点云示意图((a)实验装置图;(b)原始点云图)
算法运行环境为Intel(R) Core(TM) i7-4710HQ CPU @ 2.50 GHz, 12.0 GB DDR3 RAM,Windows 10,Visual Studio 2015,Point Cloud Library(PCL) 1.8.0,Release x64模式。
3.2 球形标靶自动提取结果
采用SHOT特征描述子进行球形标靶的粗提取结果,从图12中可以看出,SHOT特征描述子的识别结果是准确的,能够将场景中全部的球形标靶识别出来,并且具有很好的鲁棒性,对噪声具有一定的抵抗能力。

图12 场景SHOT特征识别结果示意图
由于SHOT特征描述子计算复杂、效率较低,故将场景采样率设置为0.02 m,采样后场景关键点数为16 399。通过欧氏距离聚类算法将球形标靶数据进行分类,得到自动提取10 m距离扫描球形标靶的点云分类结果。从图13中可以看出,自动提取的球形标靶结果仍保持球形特征。
图13 自动提取的球形标靶点云
将提取得到的球形标靶点云进行拟合,得到球形标靶的近似坐标,见表1。从表中可以看出,场景中各球形标靶目标关键点近140个,自动识别的对应点接近100个,识别率在71.83%~86.75%之间。其中2号球形标靶的识别率高于其他3个球形标靶10%以上。由图13可知,1,3和4号球形标靶的未识别点位于标靶支座衔接处,主要是因产生混合像元现象引起识别率降低;2号球形标靶位于支座前端处时,标靶点云未形成混合像元现象,识别率较高。

表1 SHOT特征粗识别结果表
由表1可知,粗提取结果能够得到球形标靶的近似坐标和半径参数。其中,半径中误差在0.78~2.79 mm之间。粗识别总耗时为25 723 ms,其中均匀采样耗时129 ms,SHOT特征描述子计算耗时18 194 ms,KDTree特征匹配耗时7 400 ms,欧氏聚类和最小二乘拟合耗时可忽略不计。
为了得到球形标靶的精确参数,根据球形标靶的近似参数,提取出原始场景中球形标靶点云。从图14可知,在保证球形标靶数据完整的前提下,提取的球形标靶点云仍包含一部分的非球面点。
对球形标靶点云进行迭代最小二乘滤波,得到点云滤波结果,见表2和图15所示。经过迭代最小二乘滤波,球形标靶数据去除了大部分的非球面点,半径中误差在0.26~0.33 mm范围内,耗费总时间为68 ms。可以看出,1号球形标靶和2,3,4号球形标靶的拟合半径值差异约为1 mm,表明国产球形标靶和原装球形标靶在拟合结果上存在显著的差异。

图14 原始球形标靶点云
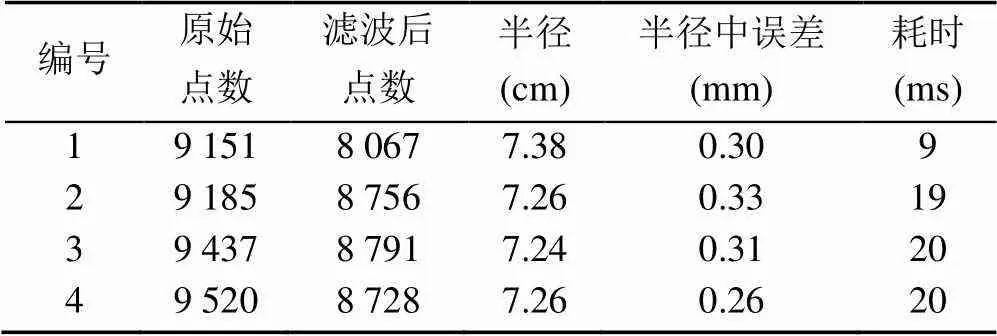
表2 迭代最小二乘法滤波结果表

图15 迭代最小二乘法滤波点云
经过迭代最小二乘滤波后,球形标靶点云还存在少量混合像元点,通过法向滤波,得到混合像元点剔除后的点云拟合结果,见表3和图16所示。由图表可知,4个球形标靶点云拟合得到的半径误差在0.25~0.33 mm,优于迭代最小二乘法结果,表明该方法能够去除少量的混合像元点,提高球形标靶拟合精度。迭代最小二乘滤波总耗时2 934 ms。

表3 法向滤波结果表

图16 法向滤波点云
将本文方法与人工提取、基于点云微分方法算法比较,结果见表4,本文方法较人工提取球形标靶点云的拟合半径误差减小0.02~0.06 mm,较基于微分方法减少0.01~0.09 mm,表明该方法能够实现球形标靶点云自动提取,并达到人工提取的准确性,并得到高精度的拟合结果;同时本文方法耗时分别为人工提取及微分方法耗时的15.5%和19.5%,能够提高自动提取球形标靶的效率。

表4 3种方法提取球形标靶结果对比
4 结束语
为了提高球形标靶的自动提取的效率和精度,本文设计了基于SHOT特征的自动提取方法,以获取球形标靶部分点云和欧氏聚类方法分割球形标靶点云的粗提取方法,以及采用迭代最小二乘滤波和法向滤波确定球形标靶点云参数的精提取方法,通过实验验证了提出方法的可行性和可靠性,得到以下几点结论:
(1) SHOT特征描述算子能够识别场景中全部的球形标靶目标,识别结果与场景关键点的选取有关,场景采样率为0.02 m时,识别率能够达到70%以上,并可得到球形标靶的大致位置参数,以满足球形标靶精提取的要求。
(2) 精提取过程,迭代最小二乘法和法向滤波能够去除非球面点,滤波后球形标靶点云的拟合半径中误差较人工提取球形标靶点云的拟合半径中误差减小0.02~0.06 mm,较基于微分方法减少0.01~0.09 mm,能够达到人工提取的准确性,得到高精度的拟合结果。
(3) 法线估计易受噪声的干扰,采用距离加权的协方差矩阵计算点云的法向能够得到更加准确的法向,提高后续数据处理的精度。
(4) 通过设计方案提取球形标靶,10 m距离内半径中误差在0.25~0.33 mm,耗时28 725 ms,该方案能够快速提取球形标靶,得到毫米级的精度,适用于高精度球形标靶的自动化提取。
本文方法通过从复杂点云场景中准确地提取出球形标靶目标,能够获得高精度的球形标靶参数。场景差异引起设置关键点参数变化,需进一步研究提高自适应参数的关键点选取方法,实现参数选取的自适应性问题。
[1] DISNEY M, BURT A, CALDERS K, et al. Innovations in ground and airborne technologies as reference and for training and validation: terrestrial laser scanning (TLS)[J]. Surveys in Geophysics, 2019, 40(4): 937-958.
[2] DONG Z, LIANG F X, YANG B S, et al. Registration of large-scale terrestrial laser scanner point clouds: a review and benchmark[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 163: 327-342.
[3] DU S Y, XU G L, ZHANG S R, et al. Robust rigid registration algorithm based on pointwise correspondence and correntropy[J]. Pattern Recognition Letters, 2020, 132: 91-98.
[4] YUN D, KIM S, HEO H, et al. Automated registration of multi-view point clouds using sphere targets[J]. Advanced Engineering Informatics, 2015, 29(4): 930-939.
[5] LIANG Y B, ZHAN Q M, CHE E Z, et al. Automatic registration of terrestrial laser scanning data using precisely located artificial planar targets[J]. IEEE Geoscience and Remote Sensing Letters, 2014, 11(1): 69-73.
[6] LIU W I. Novel method for sphere target detection and center estimation from mobile terrestrial laser scanner data[J]. Measurement, 2019, 137: 617-623.
[7] 王利华, 石宏斌, 殷义程, 等. 地面激光三维扫描中球面标靶自动检测方法[J]. 测绘地理信息, 2019, 44(3): 57-61.
WANG L H, SHI H B, YIN Y C, et al. Sphere targets automatic detection in 3D terrestrial laser scanning[J]. Journal of Geomatics, 2019, 44(3): 57-61 (in Chinese).
[8] 张立朔, 程效军, 谭凯. 基于强度图像的标靶球自动提取与参数拟合[J]. 工程勘察, 2014, 42(12): 65-69.
ZHANG L S, CHENG X J, TAN K. Automatically sphere target extracting and parameter fitting based on intensity image[J]. Geotechnical Investigation & Surveying, 2014, 42(12): 65-69 (in Chinese).
[9] 蓝秋萍, 田青红, 李子宽, 等. 利用球目标的多测站点云自动配准[J]. 测绘地理信息, 2018, 43(6): 91-94.
LAN Q P, TIAN Q H, LI Z K, et al. Study on automatic registration of spherical targets’ multi-station point clouds[J]. Journal of Geomatics, 2018, 43(6): 91-94 (in Chinese).
[10] 魏江, 何明一, 熊邦书, 等. 多视点三维数据合并中的定标球球心算法[J]. 计算机辅助设计与图形学学报, 2006, 18(3): 416-420.
WEI J, HE M Y, XIONG B S, et al. Algorithm for finding registration sphere center in merging multiple-view 3D point clouds[J]. Journal of Computer-Aided Design & Computer Graphics, 2006, 18(3): 416-420 (in Chinese).
[11] FRANASZEK M, CHEOK G S, WITZGALL C. Fast automatic registration of range images from 3D imaging systems using sphere targets[J]. Automation in Construction, 2009, 18(3): 265-274.
[12] 李嘉, 阿依古丽·阿曼, 郑德华. 复杂场景三维点云中未知球形目标的自动识别方法[J]. 计算机辅助设计与图形学学报, 2013, 25(10): 1489-1495.
LI J, AYIGULI A M, ZHENG D H. Automatically identifying uncertain spherical targets in 3D point clouds of complex scenario[J]. Journal of Computer-Aided Design & Computer Graphics, 2013, 25(10): 1489-1495 (in Chinese).
[13] SALTI S, TOMBARI F, DI STEFANO L. SHOT: Unique signatures of histograms for surface and texture description[J]. Computer Vision and Image Understanding, 2014, 125: 251-264.
[14] 张凯霖, 张良. 复杂场景下基于C-SHOT特征的3D物体识别与位姿估计[J]. 计算机辅助设计与图形学学报, 2017, 29(5): 846-853.
ZHANG K L, ZHANG L. 3D object recognition and 6Do F pose estimation in scenes with occlusions and clutter based on C-SHOT 3D descriptor[J]. Journal of Computer-Aided Design & Computer Graphics, 2017, 29(5): 846-853 (in Chinese).
[15] 齐飞飞. 图像特征点检测与匹配技术研究[D]. 兰州: 兰州大学, 2021.
QI F F. Research on image feature points detection and matching[D]. Lanzhou: Lanzhou University, 2021 (in Chinese).
[16] 田青华, 白瑞林, 李杜. 基于SHOT特征融合的散乱工件点云配准算法[J]. 小型微型计算机系统, 2019, 40(2): 275-279.
TIAN Q H, BAI R L, LI D. Point cloud registration algorithm for scattered workpiece based on SHOT feature fusion[J]. Journal of Chinese Computer Systems, 2019, 40(2): 275-279 (in Chinese).
[17] 王春林, 郑德华, 孟敏, 等. 点云中混合像元的探测与剔除算法[J]. 测绘与空间地理信息, 2016, 39(1): 102-105.
WANG C L, ZHENG D H, MENG M, et al. Algorithm of detecting and eliminating mixed pixel in dense point cloud[J]. Geomatics & Spatial Information Technology, 2016, 39(1): 102-105 (in Chinese).
Research on automatic extraction of spherical targets based on SHOT feature descriptor
WANG Hao, ZHENG De-hua, LIU Cun-tai, CHENG Yu-xiang, HU Chuang
(School of Earth Sciences and Engineering, Hohai University, Nanjing Jiangsu 210098, China)
To achieve the accurate automatic extraction of spherical targets from 3D laser point clouds in complicated scenes, a method was proposed for the automatic and accurate extraction of spherical targets based on SHOT features. This method designed the processes of rough extraction and refined extraction. In the rough extraction process, SHOT feature descriptor was utilized to extract all spherical target point clouds in the scene; secondly, Euclidean clustering was used to segment spherical target point clouds, and rough spherical target parameters was calculated using the least square. The refined extraction process was based on the iterative least squares method and normal filtering to eliminate the aspherical points, and obtain the spherical target point cloud and accurate spherical target parameters. An experimental scene with 4 spherical targets was designed. The German Z+F Image 5016 scanner was employed to collect the scene data, and the spherical target point cloud and spherical target parameters in the experimental scene were automatically extracted. The results show that in the range of 10 meters, the error of the radius of the spherical target automatically extracted by this method was 0.25–0.33 mm, which was 0.02–0.06 mm less than that of the manually extracted spherical target point cloud, and 0.01–0.09 mm less than that based on the differential method. The proposed method can achieve high positioning accuracy for spherical targets and robustly eliminate noise in the scene point cloud, and can complete the automatic extraction of spherical targets with millions of point clouds within 30 seconds.
spherical target point cloud; SHOT feature descriptor; iterative least squares; Euclidean distance clustering; normal filtering
TP 391
10.11996/JG.j.2095-302X.2022050849
A
2095-302X(2022)05-0849-09
2022-04-07;
2022-06-02
7 April,2022;
2 June,2022
国网新源控股(水电)有限公司科技项目(SGXYKJ-2020-079)
State Grid Xinyuan (Hydropower) Company Ltd. Technology Project (SGXYKJ-2020-079)
王 浩(1998-),男,硕士研究生。主要研究方向为三维点云数据处理与应用。E-mail:201309020014@hhu.edu.cn
WANG Hao (1998-), master student, His main research interests cover 3D point cloud data processing and application. E-mail:201309020014@hhu.edu.cn
郑德华(1972-),男,副教授,博士。主要研究方向为三维点云数据处理与应用及精密工程测量等。E-mail:19950059@hhu.edu.cn
ZHENG De-hua (1972-), associate professor, Ph.D. His main research interests cover 3D point cloud data processing and application, precision engineering measurement, etc. E-mail:19950059@hhu.edu.cn
