港机平衡梁腹板喷涂轨迹优化方案
2022-11-02侯文晟孟祥干
侯文晟 孟祥干 刘 龙
1 江苏卫华海洋重工有限公司 2 上海海事大学物流工程学院
1 引言
喷涂机器人的引入对大型起重机箱梁的自动化涂装生产起到了重大推动作用,但我国对喷涂机器人的研究较晚,喷涂机器人系统离线编程技术的水平也较低,在实际使用中的效果并不理想[1]。因此,如何优化喷涂机器人的喷涂轨迹,使涂层厚度均匀[2],减少涂料的使用量和对环境的污染是值得进一步研究的问题。
Conner等建立了静电旋杯的数学模型,提出了一种适用于平面上的高压静电旋杯涂料累积模型[3]。张永贵针对实际生产中喷涂机器人空气喷枪喷雾的形状提出椭圆双β分布模型,并在平面上进行实验,验证了该模型的有效性[4]。李发忠等针对表面有凹凸结构的复杂曲面,采用匀速喷涂方法,根据实验数据推导出平面上的漆膜累积速率二次函数,采用微分几何的面积放大定理,推导出自由曲面上的漆膜累积速率二次函数[5]。冯川在研究喷涂机器人喷炬后,根据物理模型采用分段函数的形式表示涂料在工件表面的分布,并在此基础上进一步得到涂料的沉积方程[6]。樊少卿提出了基于喷涂过程物理特性分析的一般化静态喷涂理论模型,推导了相应的动态喷涂模型和自由曲面斜喷模型[7]。陆保印建立了一种对特定的空间路径的新的涂层累积速率模型[8]。李祥明等针对多次喷涂涂层厚度不均匀问题,在优化的单次喷涂轨迹的基础上建立了多次喷涂均匀度叠加优化模型[9]。孟慧杰等建立带约束条件的多目标优化问题的数学模型,利用非劣排序遗传算法(NSGA-Ⅱ)的优化方法求得最优解集[10]。
目前对于平板的喷涂轨迹研究比较成熟,但对于复杂结构,例如含有孔洞、凸台、焊缝坡口等不连续结构的喷涂轨迹优化研究较少。为此,以平衡梁腹板为例,进行复杂平面构件喷涂轨迹优化分析。首先根据平衡梁结构特点,对腹板平面进行区域分片;然后对每个子片进行喷涂路径规划;最后应用遗传算法进行整体喷涂顺序优化,并通过典型算例进行验证。
2 平衡梁腹板平面区域分片
考虑到局部膜厚均匀性以及喷涂机器人的可达性要求,对于复杂平面构件,首先应进行区域分片[11],得到一系列子片。子片面积较小且较为平坦,易于进行喷涂轨迹规划。
在比较常见的规则图形中,四边形是较容易喷涂的,工件进行分片时,应遵循规则凸多边形原则[11]。根据平衡梁腹板结构特点,分片操作后得到13个子片(见图1)。从图中可以看出各个子片的平面较为平缓,左右呈对称分布。
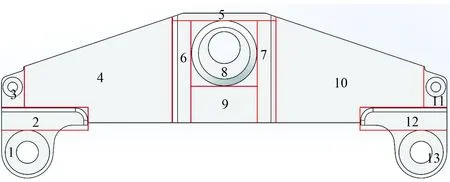
图1 平衡梁腹板的分片示意图
3 平衡梁子片喷涂路径规划
针对每一个子片进行喷涂路径的规划,每片子片上的喷涂速度v、轨迹间距d以及喷涂高度保持不变,但是子片与子片之间的交界处轨迹规划较为复杂[12]。
目前喷涂机器人主要的行进路径有栅格式、螺旋式等。栅格式喷涂路径形式简单,易于规划,涂层的整体均匀性较好,但边界处的喷涂效果较差;而螺旋式边界的涂层均匀性较好,但形式较复杂,涂料损耗较高。
子片的规划方式选择格栅式还是螺旋式,主要取决于公共边的长度以及条数。当子片只有一条公共边时,可以采用格栅型的路径规划方式进行喷涂,从而保证公共边处的轨迹位置是平行的关系。当子片的公共边的长度小于其高度时,采用螺旋型比格栅型路径规划方式要好,可以避免过多的轨迹转角,提高喷涂的效率。如图2所示,虚线表示的是公共边,可见螺旋型的喷枪轨迹拐点明显少于格栅型。
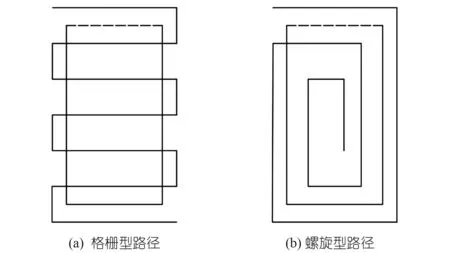
图2 栅格型与螺旋型路径的对比
对于含有多条公共边的子片在做轨迹规划时,应该以最长的公共边为基准进行规划,优先选择平行的轨迹搭接方式。为了保证公共边轨迹尽量为平行式,可将公共边较多子片的喷涂路径类型设置为螺旋式(见图3)。
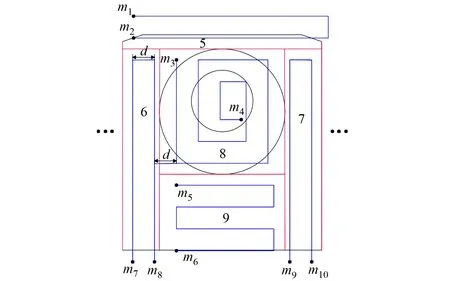
图3 子片8的螺旋式轨迹规划示意图
每个子片上的喷涂速度v和轨迹间距d的计算可通过求解优化问题得到[13]:
d∈[0,2b],v∈(0,vmax)
(1)
式中,Td为期望膜厚值;vmax为机器人喷涂速度的上限;b为喷涂椭圆喷幅的半长轴。
在对各个子片以及公共边处的轨迹规划完成后,得到整个平衡梁腹板的轨迹规划(见图4)。

图4 平衡梁喷涂轨迹规划示意图
图中每个子片中喷涂轨迹的起始点和终止点并不固定,可以相互转化,接下来进行整体喷涂轨迹组合优化。
4 基于蚁群算法的喷涂轨迹组合优化
各子片轨迹规划完成后,整体的喷涂轨迹优化可转化为子片的喷涂轨迹连接的先后顺序问题,优化目标是寻找一条能够经历过所有子片线段的路径,使得喷涂机器人所经过的总路径最短。
该问题与旅行商问题类似,是一个典型的NP-hard问题[14]。蚁群算法是最早成功运用于解决该类问题的方法之一,通过模拟蚂蚁的搜寻模式来进行优化计算,其具有较快的收敛速度以及较强的鲁棒性,可以有效避免陷入局部最优解的问题。因此采用蚁群算法来对分片组合轨迹连接顺序问题进行优化求解。
该问题可描述为:根据结构特点,构造顶点集合V={V1,V2,…,Vn}(n≥3),Vi={Aa、Bb、Cc、…、Mm}。其中,A和a分别表示子片中轨迹的两个端点,则路径方向存在A→a和a→A两种情况。以此类推,用二进制变量l=(l1,l2,…,ln)表示路径方向。
蚁群算法计算需设置以下参数:蚂蚁个数m,信息启发因子α,期望启发因子β,信息素挥发系数γ,信息素强度δ,最大迭代次数n。每条路径的初始化信息素浓度εij=C。
模拟蚁群搜索食物方式,将m只蚂蚁放在不同的子片处,l=0或1,随机取值。以第1个子片为例,l=0时规定蚂蚁运动的方向为A→a;l=1时运动方向相反为a→A。以此类推其他子片也同样设置。

(2)

5 典型算例
选取典型平衡梁,长度为3 620 mm,高度为1 340 mm,以中漆为列,期望膜厚为80 μm。
首先选取石墨烯水性环氧中漆涂料,通过静态平面喷涂实验,运用最小二乘法对膜厚数据进行基于椭圆高斯和函数的拟合,得到膜厚分布函数为:
T(x,y)=51.92×exp(-x2/16.932-y2/37.812)
+26.96×exp(-x2/61.962-y2/94.652)
(3)
通过遗传算法,迭代运算后得到子片喷涂速度v=44.2 mm/s和轨迹间距d=93.3 mm。
基于蚁群算法的喷涂轨迹组合优化计算,运用MATLAB编制程序求解。蚁群算法中蚂蚁数量设置为100,信息启发因子α=1,期望启发因子β=5,信息素挥发系数γ=0.1,信息素强度δ=1,最大迭代次数n=500代。
未经优化的子片间过度路径的总长度约为5 647 mm,随着迭代次数的增加呈单调下降趋势,在大约迭代100代后趋于稳定,最终的过度连接路径的最优总长度为5 020 mm,得到的子片轨迹最优连接图见图5。
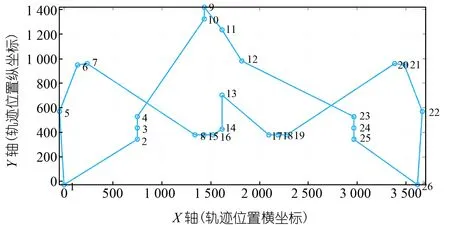
图5 子片简化轨迹最优连接示意图
对整个平衡梁腹板完成轨迹优化设计后,输出腹板的理想涂层厚度示意图见图6。从图中可以看出,膜厚均已满足要求,最大膜厚小于90 μm,膜厚均匀度较好。
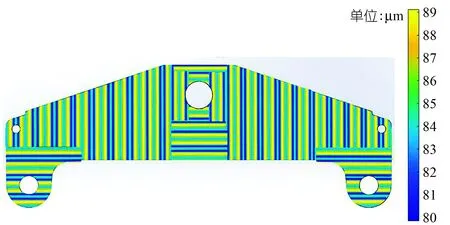
图6 平衡梁腹板的整体膜厚示意图
6 结语
针对平衡梁腹板复杂平面结构,对其进行区域分片及喷涂轨迹优化研究,利用蚁群算法实现平衡梁腹板喷涂路径的寻优,可得到较理想的涂层膜厚。港口机械自动化喷涂还有很多问题有待进一步研究,例如如何根据三维模型通过智能算法实现快速分片、喷涂机器人手臂轨迹规划等,均是需要重点研究的方向。
