基于自抗扰控制策略的微电网运行模式平滑切换的控制研究
2022-11-02陈晶滕青芳
陈晶, 滕青芳
(1.兰州工业学院,甘肃 兰州 730050; 2.兰州交通大学,甘肃 兰州 730070)
0 引 言
目前,我国在双碳背景下对新能源的需求日益迫切。微电网技术发展迅猛,它主要由微源、储能设备,控制装置和负荷等组成,其中微源包括光伏发电、风力发电、微型燃气轮机和柴油发电机等。微电网主要在并网和离网(孤岛)两种模式下运行。并/离网切换过程中会出现电压、电流和频率的波动,影响给负荷供电的稳定性,因此实现微电网平滑切换成为目前电网技术研究的热点之一。
本文采用对等控制模式,其各个微源地位相同不存在主从的区别,具有结构简单可靠、即插即用的优点,通常采用下垂控制来调节各微源的电压和频率[1-2]。如今,微电网并/离网运行模式平滑切换的控制策略层出不穷。文献[3]提出并网和孤岛运行模式平滑切换,超级电容和蓄电池组成综合储能装置,切换时需要进行双模式切换,即控制模式和控制方法。文献[4]将自抗扰控制器应用到三相四开关逆变器驱动PMSM系统中,主要令ADRC调节系统的转速, 以此来提高系统的鲁棒性。文献[5]以主从结构的微电网为例,将线性自抗扰控制策略应用到微电并网孤岛运行模式的切换中,有效地降低了切换过程中引起的电压和频率的波动。文献[6]提出一种改进的切换控制策略,对逆变器输出各值在切换前进行预同步,在切换过程中用改进的非线性下垂曲线进行控制,以此实现并离网的平滑切换。
1 微电网的结构
本文采用对等结构的微电网作为研究对象,如图1所示。其中包括各个地位相同的对等微源和公共连接点(point of common coupling, PCC)。每个微源都包含下垂控制环节。当开关闭合时,微电网处于并网状态,可视为大电网的一个可变负荷;当开关断开时,微电网处于孤岛运行模式。
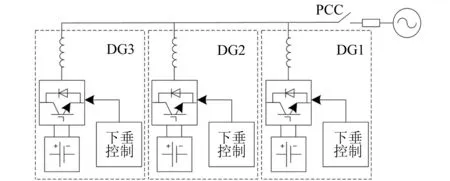
图1 微电网对等控制结构图
图2为基于对等模式三相并网逆变控制系统的结构框图。逆变控制系统的总体控制策略分为两级,前级为下垂(droop)控制模式,后级为电压电流双环控制模式。droop控制为后级控制提供电压参考,本文后级控制中的电流控制环采用PR控制。

图2 基于对等模式三相并网逆变控制系统的结构框图
2 自抗扰控制器的设计
自抗扰控制[7]由跟踪微分器(tracking differentiator,TD)、扩张状态观测器(extended state observer, ESO)和非线性状态误差反馈控制律(nonlinear state error feedback, NLSEF)组成。特点是用“未知扰动”囊括了所有的内外干扰因素,再用ESO对这些扰动进行估计并补偿。该策略优于其他控制策略的重点在于不要求被控对象的数学模型一定非常精确,并且具有较好的精确性、快速性、鲁棒性和抗干扰能力[8-10]。一阶线性自抗扰(LADRC)控制器的结构如图3所示。

图3 一阶LADRC控制器结构
图3中:ref为参考输入;LSEF为线性状态误差反馈控制律;u0为对扰动进行补偿后所得的积分串联型控制对象的控制量;b0为系统增益;u为控制量;y为系统输出;z1、z2分别为系统对输出量和扰动量的估计值;GP为被控对象;LESO为线性扩张状态观测器。
3 微电网平滑切换控制策略
3.1 并网孤网切换的振荡分析
并网运行模式切换至孤网运行模式时,流过公共连接点PCC处的电流通常不为零,瞬间切换势必会出现电压和频率的振荡。并网运行时,电流内环参考值由功率环给定;孤岛模式下,电压外环向电流内环提供参考电流。切换瞬间,电流参考值的跳变会引起输出扰动[12]。为此,提出将ADRC控制策略应用其中,以此实现微电网的平滑切换。
3.2 控制系统结构设计
将ADRC应用到电压外环控制中,并产生电流内环所需的参考电流iref。根据LADRC的工作原理,将双通道控制简化为两个单通道控制:
(1)
式中:y1、y2分别为通道1和2的系统输出;b1、b2分别为通道1和2的控制器增益;u1、u2分别为通道1和2的控制量;f1、f2为各子系统的总扰动,分别包括了各自的内外扰动、不确定建模带来的未知量以及与其他子系统的耦合;ω1、ω2为系统中通道1和2的不可测扰动;t1、t2分别为通道1和2的扰动时间。因此本文提出将LADRC应用到微电网切换的电压控制环上,结构如图4所示。
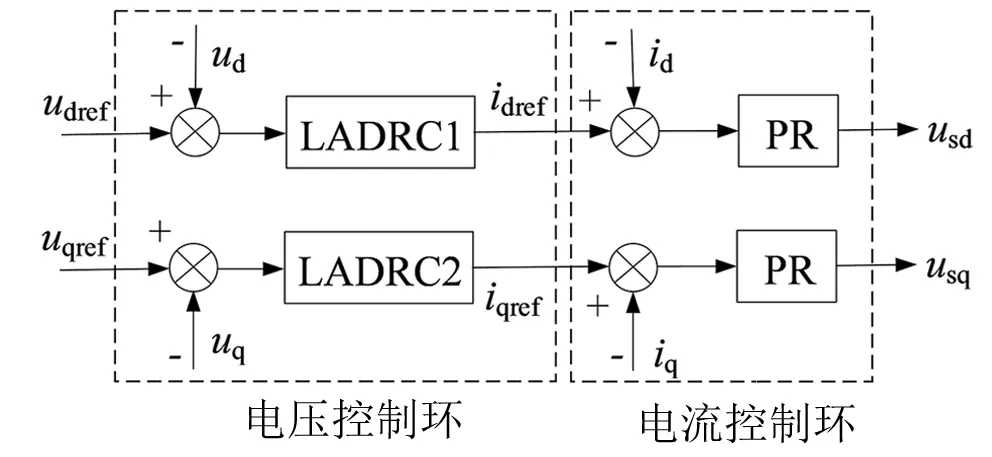
图4 基于LADRC的控制系统结构图
4 仿真分析
以单模式对等控制微电网为例,用800 V的直流源等效代替两个分布式微源DG1和DG2,所带负荷为本地负荷。在MATLAB/Simulink 中搭建仿真模型,验证将ADRC控制策略应用到微电网平滑切换中的有效性和可行性。
微电网切换过程中,通常从以下几个方面分析微电网是否实现了平滑切换,即微源DG1的a相母线电压波形、电流给定值和系统频率变化等。设定微电网0时刻开始为并网运行,在0.2 s时切换为离网运行,在0.4 s时重新连接主网切换为并网运行,切换过程仅保持本地负荷运行。负载有功功率为25 kW,无功功率为10 kW,仿真时间为0.6 s,仿真结果如图5所示。
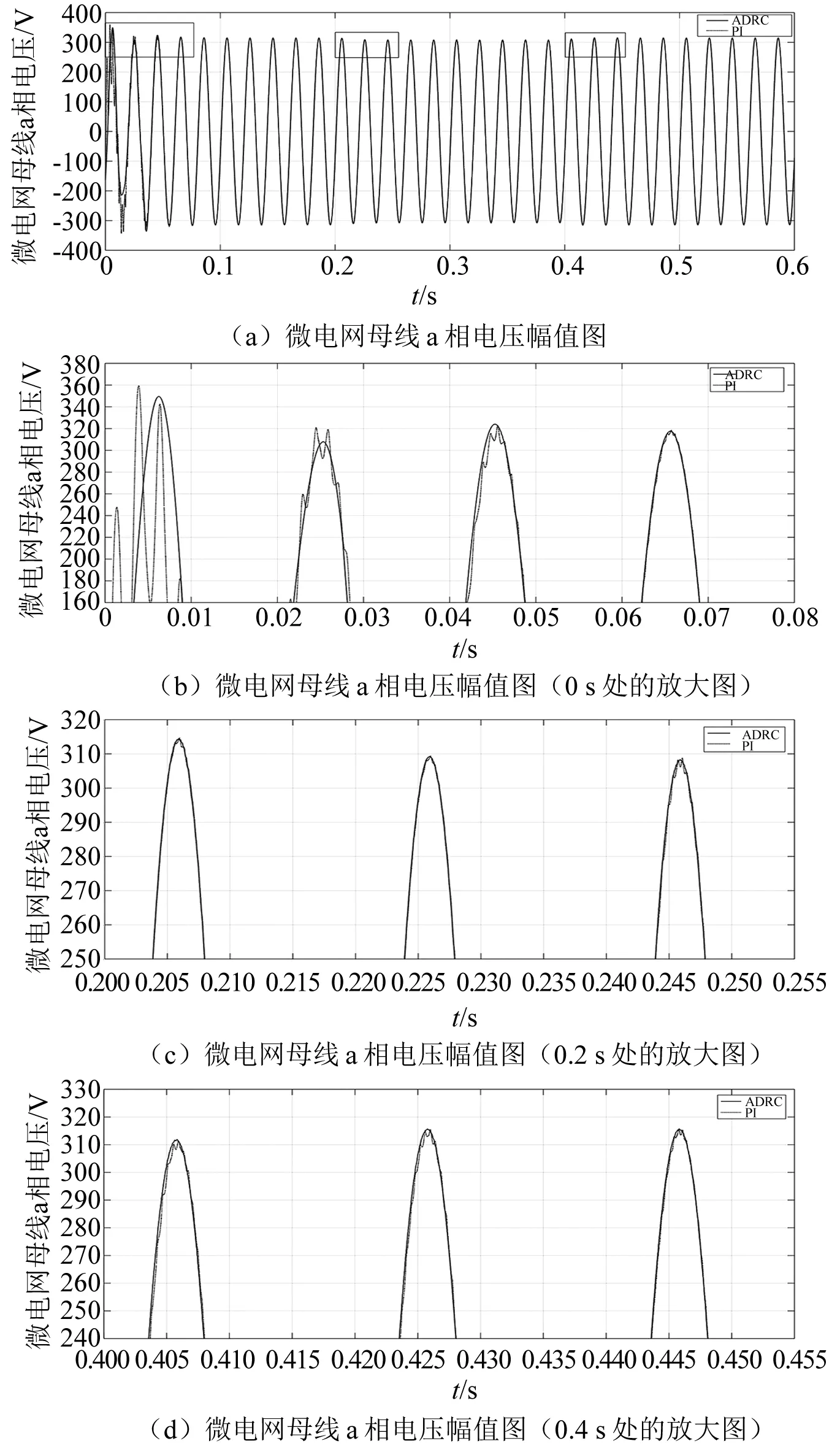
图5 切换模式下微电网a相母线电压
图5(b)、图5(c)、图5(d)为图5(a)在0 s、0.2 s 和0 .4 s处的局部放大图。可以看出:在ADRC控制策略下,微电网母线a相电压最大幅值为350 V,大概在0.06 s处趋于稳定;而在传统的双PI控制下,微电网母线a相电压幅值最大为360 V,大概在0.09 s处趋于稳定。由图5(c)和图5(d)可以看出:在ADRC控制策略下,微电网并/离网切换较为平滑,而PI控制策略下切换时存在一定程度的波动。
离网切换过程中会存在振荡,这主要由电流内环给定值不同引起的。图6为电流内环给定值。从图6可以看出,在ADRC策略下较PI策略下响应较快,大概在0.04 s处达到稳定,而PI策略下的波动幅度较大。

图6 电流内环给定值
图7为微电网频率变换曲线,由图7可知,ADRC策略下频率变化较PI下变化较为平滑。

图7 微电网频率变换曲线
从以上仿真结果可知,将ADRC策略应用到微电网运行模式平滑切换上效果较好。响应快速性、稳定性和鲁棒性都比传统的双PI控制效果佳。
5 结束语
针对对等结构的微电网并网和离网平滑切换过程中存在波动不稳定的情况,提出了将ADRC控制策略应用到外环电压环控制中,内环采用PR控制。运行模式切换过程中存在的各种内、外扰动都由状态观测器进行实时在线估计,并对其进行补偿,以此来消除切换过程中电压电流波动等问题。最后,仿真验证了所设计的ADRC控制策略具有较好的稳定性和快速性,能较快地响应并有效减少切换过程中存在的暂态振荡,而且结构简单,具有较好的工程应用价值。