液电式主动悬架滑模控制仿真研究
2022-11-02李奕宝何家兴
张 晗,殷 珺,李奕宝,何家兴
(广州汽车集团股份有限公司汽车工程研究院,广东 广州 511434)
近年来,随着汽车新四化的飞速发展,底盘电控化、智能化的程度也日益提高。半主动悬架技术在新势力品牌中得到极大的应用,带动整个产业飞速发展。
半主动悬架的优势相对传统悬架非常明显,但是,在整车性能提升的方面仍然存在一些短板,而主动悬架则能够带来更大的性能提升增量。在主动悬架领域,不少作者已经做出了有益尝试。OKADA与SUDA Y研究了直线电机式主动减振器,能够实现对悬架的主动做功。ZUO研制直线电机式主动减振器系统,并进行了样机试制及实车试验。LI Z J设计了一种齿轮齿条式主动减振器,通过电机控制可以实现对车辆的主动控制,并且能够吸收车辆的振动能量。喻凡、黄昆、张勇超等提出由滚珠丝杆结合永磁直流无刷力矩电机构成的主动悬架作动器方案,研制了原理样机并实现了车辆的主动控制。徐琳等提出一种液电馈能式主动减振器,该方案利用一个液压整流桥将减振器缸筒内的油液引出,油路经过一个液压马达-电机组件,电机对液压马达转速进行控制,从而原理上可以实现系统的主动控制,还可以回收一定的振动能量。
本文针对一种液电式主动悬架,设计了滑模控制器,结合悬架二自由度模型,进行了液电式主动悬架的仿真试验,验证了算法的有效性。
1 液电式主动悬架工作原理
液电式主动悬架系统原理如图1所示,通过簧上、簧下加速度传感器实时探测加速度信号并传输给控制器,控制器结合算法对电机下达指令,电机转动带动液压泵工作,对有油缸的阻尼力进行主动调节。液压泵既可以实现阻尼力的调节,还可以推动液压缸将车身抬高、降低。
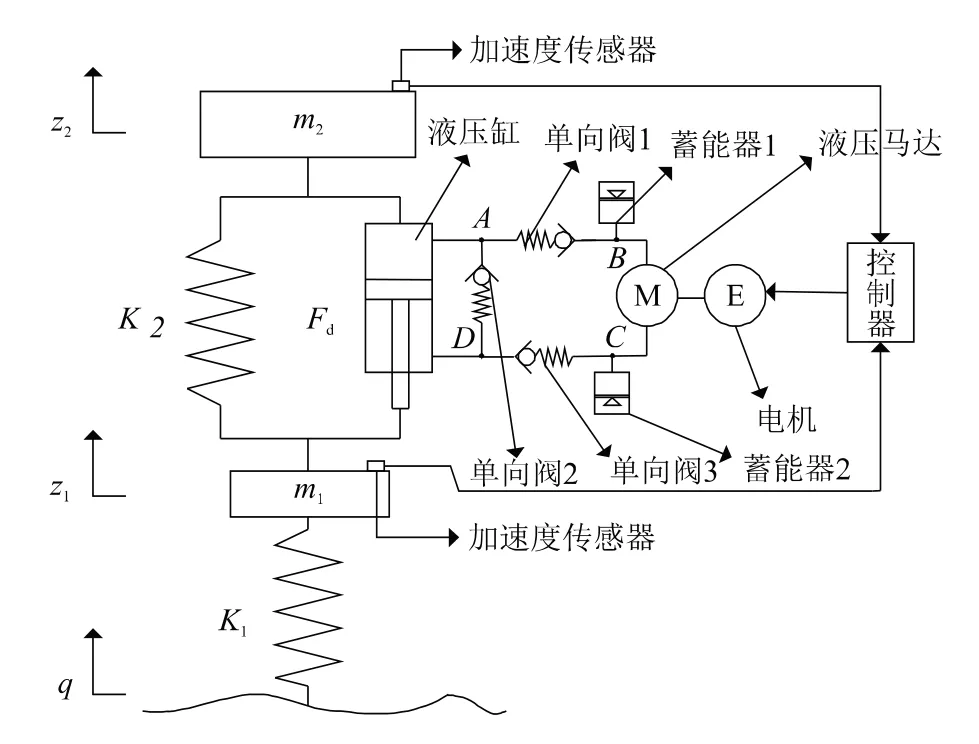
图1 液电式馈能半主动悬架原理图
为簧载质量,kg;为非簧载质量,kg;为悬架刚度,N/m;为轮胎刚度,N/m;为路面位移,m;为簧载质量位移,m;为非簧载质量位移,m;为液电式馈能减振器的阻尼力,N;、、、为液压管路中的节点。
液电式主动悬架的执行器原理详见文献[19],本文不再赘述。
2 液电式主动悬架系统模型
2.1 路面模型
路面模型采用文献[19],由式(1)所得出的B级路面位移如图2所示。
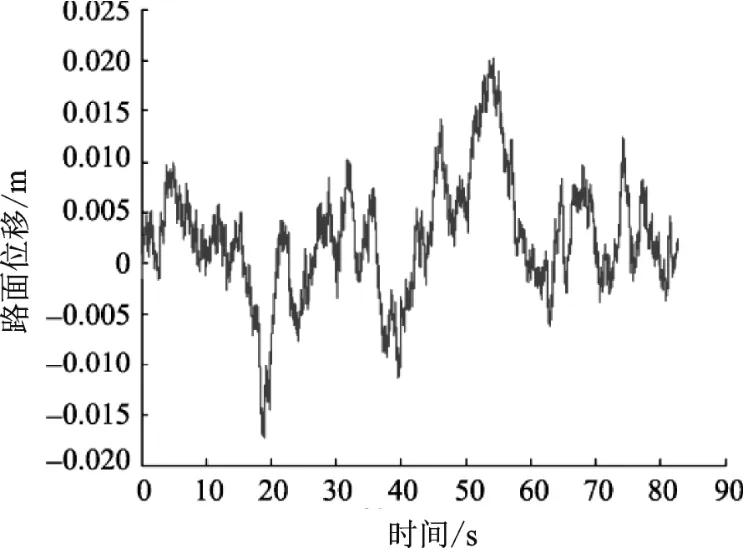
图2 B级路面激励时域曲线

式中,˙为路面位移的导数,m/s;为下截止频率,Hz;为空间频率,m;()为参考空间频率下的路面功率谱密度值,也可称之为路面不平度系数;为车速,m/s;为均值为零的高斯白噪声。
2.2 液电式主动悬架动力学模型
依据牛顿第二定律可列出液电式主动悬架的动力学方程为


液电式主动悬架作动力包含油缸自身的黏性阻尼力与电机-液压油泵提供的主动作动力。
可以理解为是液电式主动悬架的固有阻尼力,与悬架运动速度相关,无法进行主动调节,的数学拟合表达式根据文献[19]所述为

式中,为液电式馈能减振器阻尼力,N;为HERA活塞速度,m/s;、、、、为多项式拟合系数,其数值分别为-24 900、-20 370、5 187、7 460、253。
是可以根据控制算法进行主动调节的作动力部分,能够改变悬架的阻尼力,并且还可以实现车身高度的调整。
因此,液电式主动悬架作动力可以表示为如下形式。

式中,是对应于的黏性阻尼系数,N·s/m。
因此,液电式主动悬架系统动力学方程又可以表示为

2.3 滑模控制器设计
滑模变结构控制(Sliding Mode Control, SMC)本质上是一种非线性控制,表现为控制的不连续性,控制系统可以根据系统误差的变化实时地产生适当变化,以使得系统输出能够维持在滑模面附近区域。
滑模变结构控制器设计的基本思路分为被控系统状态方程描述、滑模切换函数设计、滑模趋近律设计、滑模系统稳定性验证。
SMC控制器设计之前,通常会假设一个半主动悬架是线性系统,并且其所有参数均为已知,则较易获得一个控制率使得此理想半主动悬架系统达到预期的控制性能。因此,首先应该选择一个理想的悬架模型作为参考对象,设计控制率使得被控对象运动与参考模型保持一致。
液电式主动悬架的二自由度系统框图及SMC控制的参考模型见图3所示。

图3 半主动悬架滑模控制模型与参考模型系统原理图
悬架评价指标一般为车身加速度、悬架动行程、相对动载荷,考虑到相对动载荷与车轮动位移之间只存在一个比例系数的问题,本章中为了矩阵表达与计算简便采用车轮动位移作为指标。因此,定义状态变量与输出变量分别为
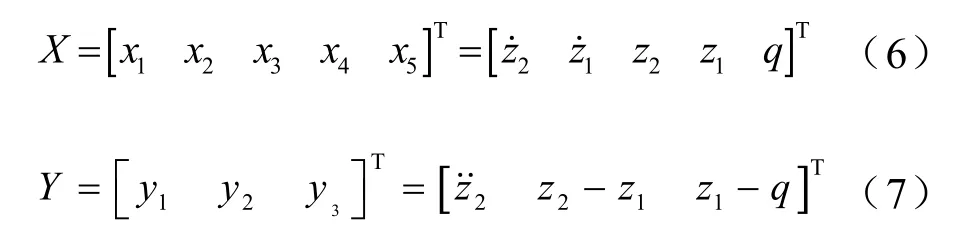
因此,悬架系统的状态方程可以表示为式(8)所示的形式,其中,为状态变量;为控制输入矩阵;为高斯白噪声输入矩阵。

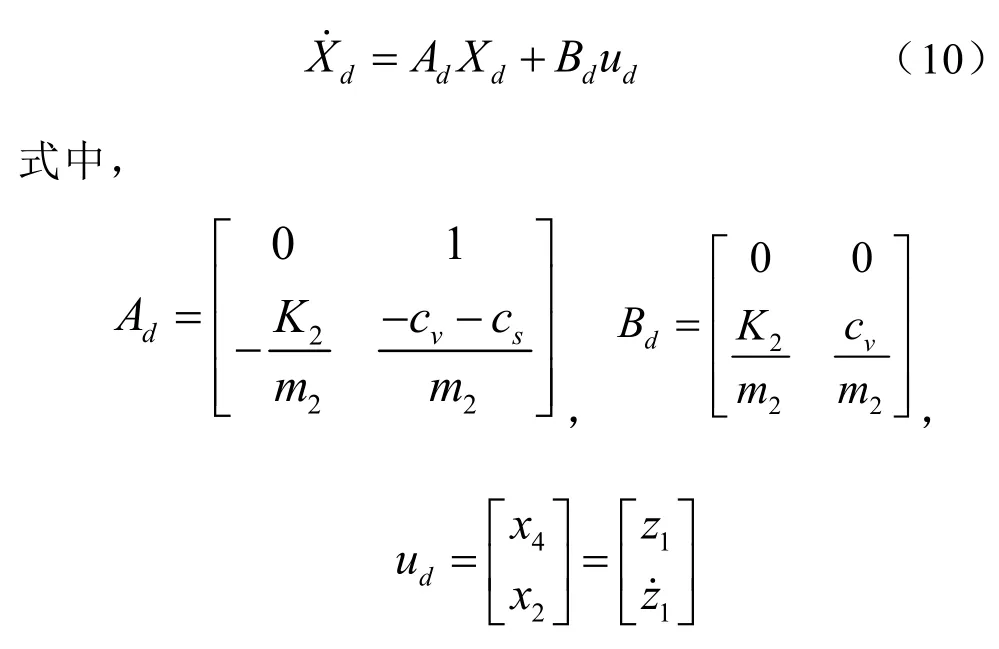
参考模型的动力学方程可表示为


取状态变量Z=[]=[z˙],则联立式(5)、式(6)可以建立基于滑模控制的液电式主动悬架二自由度动力学模型。
取状态变量=[]=[z˙],则参考模型的状态方程为

据此,可以得到误差向量的元素e的表达式为
式中,
定义误差矢量的切换函数为



为了改善滑模控制的动态品质,采用等速趋近律。

式中,为趋近系数,>0;取值越大,系统到达滑模面越快,同时带来的系统颤振也增大;取值小,虽然可以削弱系统的颤振,但是系统到达稳定状态的过渡期也越长。
因此,液电馈能式半主动悬架控制阻尼力为

3 仿真试验
仿真条件为某SUV车型匀速行驶在B级路面,计算车身加速度、悬架动行程、车轮动位移三个指标的响应,仿真结果如图4、图5、图6所示。

图4 车身加速度功率谱密度
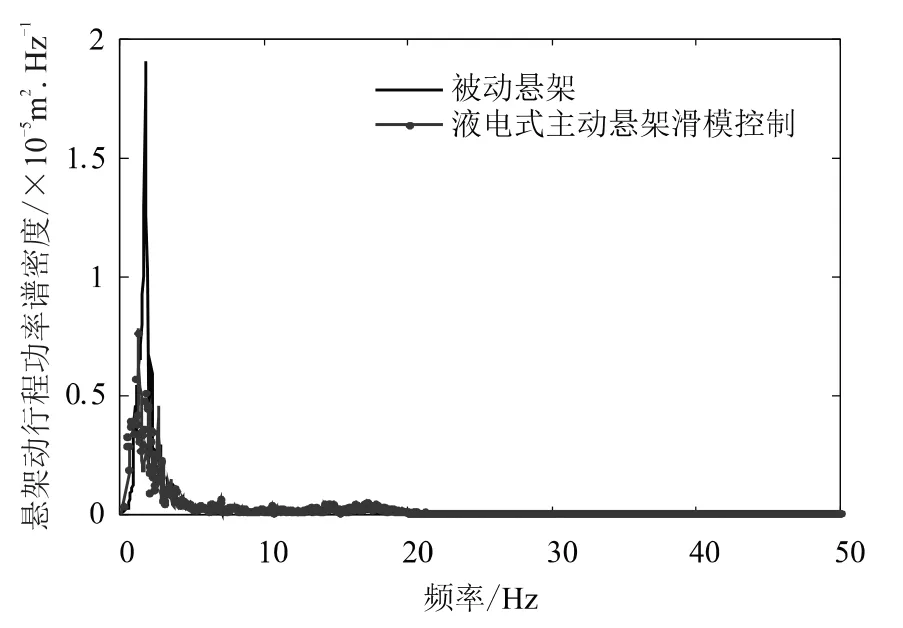
图5 悬架动行程功率谱密度
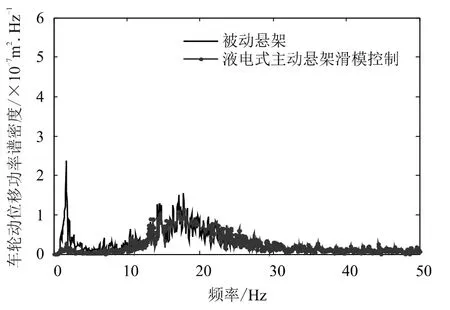
图6 车轮动位移功率谱密度
(1)在车身共振频率处,采用滑模控制的液电主动悬架的三个指标的幅值明显低于传统悬架。表明了滑模控制策略能够有效地起到抑制车身共振峰的效果。
(2)在车轮共振频率处,采用滑模控制的液电主动悬架三个指标相比于传统悬架,具有一定小幅优势,但是差别不显著。
(3)在车身与车轮共振频率之间的过渡频段内,基于滑模控制的液电主动悬架车身加速度幅值显著优于传统悬架;悬架动行程、车轮动位移幅值略优于传统悬架。
对仿真试验所得悬架指标参数的时域数值进行统计,计算其均方根值如表1所示。车身加速度与悬架动行程在进行控制后均方根值小于被动悬架,而车轮动位移保持不变。
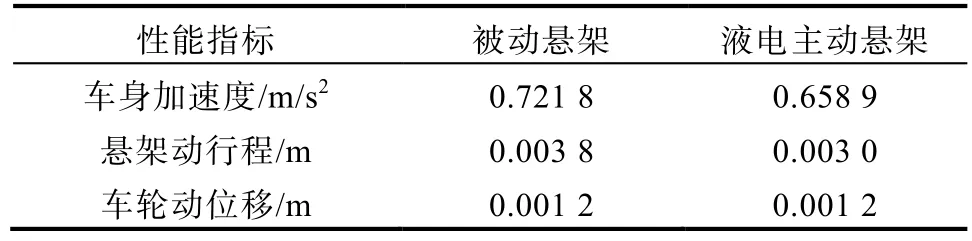
表1 滑模控制下悬架指标均方根值对比
4 结论
设计了一种基于液电式主动悬架的滑模控制器,进行随机路面行驶的仿真试验。仿真试验结果表明,采用滑模控制的液电主动悬架在车身振动控制方面效果显著;在车轮控制及过渡频带控制仍然优于传统悬架。
