考虑任务协作的煤矿掘进配套多设备协同控制方法
2022-11-01胡成军
李 波,刘 宾,高 明,胡成军
(中煤(天津)地下工程智能研究院有限公司,天津 300131)
0 引言
随着工业的不断发展,煤炭开采挖掘技术[1]无法满足国家发展需求时,如何有效提升煤炭挖掘效率,成为煤炭开采部门急需解决的问题。提升煤炭开采效率,就必须优化煤炭开采技术,使其走向无人化、少人化,以此降低开采时的事故发生率,实现煤炭综采的智能化。系统控制方法作为煤矿掘进配套设备的主要控制方法,在煤矿挖掘中作用巨大。当传统的控制方法无法有效完成机械的系统控制时,提出更加高效的煤炭掘进多设备协同控制方法[2],成为人们亟待解决的问题。
文献[3]提出一种智能最优组合补偿策略来控制掘进姿态。基于悬臂式掘进机的拓扑结构分析,建立了空间姿态偏差的结构环补偿模型。应用主成分分析(PCA)和多目标粒子群优化(MPSO)算法来提高姿态偏差的分析速度和精度。并通过并行协同策略实现,最终实现了悬臂掘进机在截割过程中空间动态姿态偏差的分析和执行。文献[4]提出高效快速掘进系统的协同控制。该方法依据设备协同控制需求,将掘进系统与各项设备之间实施数据双向交互,实现设备的联动,从而达到设备的协同控制。
上述2种协同控制方法由于未能在设备控制前,对设备能耗影响因素展开具体分析,所以存在控制时间长、控制精度差等问题,因此,本文提出考虑任务协作的煤矿掘进配套多设备协同控制方法。
1 煤矿掘进设备能耗分析
由于煤矿的开采系统较为复杂,所以在对煤矿掘进设备展开协同控制前,需要对煤矿掘进配套设备能耗展开具体分析[5]。基于煤矿实际产量,将煤矿掘进时的设备能耗影响因素大致划分成自然环境、设备、生产管理以及科学技术几部分,具体影响因素如图1所示。

图1 煤矿掘进配套设备能耗影响因素
由于煤矿掘进配套设备中,掘进系统、运输系统、排水系统和通风系统[6]处于并联做工方式,所以煤矿掘进设备会一直维持流水线式工作状态。煤矿掘进配套设备的总能耗表示为
(1)
Q为设备总能耗;m为设备数量;ai为设备负荷量;β为设备能耗系数;gi为设备i的运输高度;μi为设备i的工作效率函数;li为设备i的运输距离;si为设备i的损耗;at为煤矿掘进配套设备的总流量。
由于煤矿配套设备需要协同运行,煤矿掘进过程中,部分设备运行、部分设备停止、部分设备备用,所以开展设备损耗分析[7]时,需要获取掘进设备的能量函数值,表达式为
(2)
Qt为设备的能量函数值;tj为煤矿掘进设备j的工作状态;αj为能量要素。配套设备的控制系统的总负荷值为
(3)
δ为设备总负荷;n为常数。基于上述获取的设备能耗、能量函数值以及总负荷值,完成煤矿掘进配套设备的总体效率值,结果为
(4)
μt为总体效率值;φj为煤矿掘进设备j的负荷;μj为设备j效率值。设备的总体效率函数表示为
(5)
Wt为煤矿掘进设备最佳负荷点的目标函数[8];fj为目标价值系数;μt(μj)为设备总体效率函数;b为常数;μj为设备j效率值。由于获取的效率函数为二次凸函数,所以可依据极值求取方法[9]对效率函数值展开推算。依据推算结果,完成煤矿大型掘进设备最佳负荷值以及总体最优效率、最优能耗值的获取,分别表示为
(6)
φn为煤矿掘进设备最佳负荷值;μbest为总体最优效率效率;Qbest为最佳能耗。
依据上述计算结果可知,煤矿掘进配套多设备在工作时,设备负荷一定时,设备在工作时负荷量为最佳状态,设备的工作能耗较小。
2 煤矿掘进配套多设备的协同控制方法
基于上述煤矿掘进配套多设备的能耗分析结果,建立煤矿掘进配套多设备协同控制模型,通过控制模型获取最佳控制策略,从而实现煤矿掘进配套多设备的协同控制。
2.1 建立煤矿掘进配套多设备的协同控制模型
设定煤矿巷道的横截面坐标系为poq,巷道左侧钻孔位置为Lms,左侧掘进机为JLm[10-11],煤矿右侧巷道钻孔位置为Rms,右侧掘进机位置为JRm,巷道顶部钻孔位置为Dm,掘进机操作半径为α,建立的协同控制模型如图2所示。
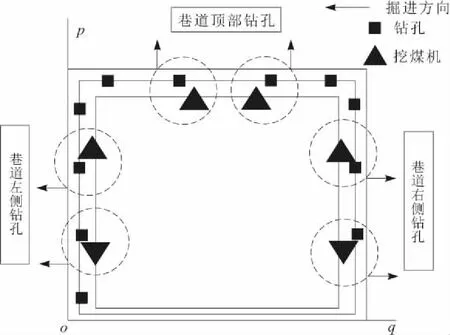
图2 煤矿掘进配套设备的协同控制模型
由图2可知,煤矿巷道内,巷道截面和挖掘设备数量已知情况下,可以依据巷道尺寸计算煤矿掘进配套设备中掘进机数量,过程表示为
(7)
K为煤矿巷道宽度;G为煤矿巷道高度;β为煤矿掘进配套设备中掘进机数量。设煤矿巷道的左右侧掘进机工作时间分别为TR和TL,依据Ti=TR+TL,完成煤矿中掘进机数量的计算[12-13],并以此获取煤矿掘进设备的相关任务数量,表示为
(8)
Ti为设备i的掘进土方量;Tj为掘进机j的挖掘时间;Si为获取的任务数量。使用最优分配方法对任务总数量实施最优分配,获取掘进机的最佳组合数,并通过最佳组合数制定煤矿掘进配套设备的组合策略判定矩阵,即
(9)
ZL,ZR,ZD为煤矿掘进配套设备的最佳组合数;ZL为煤矿挖掘时配套设备的左侧最佳组合数量;ZR为巷道右侧的配套设备数量;ZD为巷道顶部的配套设备数量;s=X+Y为巷道侧面与顶部的设备总数量;PX为巷道侧面部分的策略判定矩阵;PY为顶部策略判定矩阵;Eij为矩阵参数;P为煤矿总判定矩阵。
依据上述计算结果,制定煤矿掘进配套设备在协同工作过程中的负荷约束条件[14],表示为
(10)
φn为煤矿掘进设备最佳负荷值;μbest为总体最优效率;Qbest为最佳能耗;OX,Y为最佳欧氏距离。
通过建立的约束条件,获取煤矿掘进配套设备多任务协作的最佳组合策略,表示为
ρ=Zcdest+Zddest
(11)
Zcdest为煤矿巷道内的侧面最佳掘进组合数量[15];Zddest为顶部最佳组合数;ρ为煤矿掘进配套设备多任务协作的最佳组合策略。
2.2 协同控制流程
基于煤矿掘进配套设备多任务协作的最佳组合策略完成煤矿掘进配套设备的协同控制。流程如下所述:
a.分析煤矿设备耗,建立煤矿掘进配套设备协同控制模型。
b.获取煤矿巷道内,各掘进配套设备数量以及挖掘点数量。
c.通过最佳组合算法获取煤矿掘进配套设备组合总数量。
d.建立策略判定矩阵,并对其归一化处理。
e.计算煤矿巷道内各方向的组合策略值。
f.制定设备负荷约束条件,获取最佳组合策略值,完成煤矿掘进配套设备协同控制。
3 仿真实验
在设备协同控制过程中,控制方法的控制性能是检测方法是否有效的关键。设定控制时间、控制精度控制效果3个控制性能测试指标,对本文方法、文献[3]方法和文献[4]方法开展控制性能测试。
3.1 控制时间测试
在开展设备协同控制时,控制时间的长短是测试协同控制方法控制性能的关键,控制时间越长,说明控制方法的控制性能越差,控制时间越短,说明控制性能越好。3种控制方法的控制时间测试结果如图3所示。

图3 不同控制方法的控制时间测试结果
由图3可知,随着设备的增加,3种控制方法的控制时间均呈现不同程度的增长趋势。其中,本文方法控制时间是3种控制方法中最短的,平均小于12 s,这主要是因为本文方法计算了煤矿掘进配套设备的总能耗与能量函数值,并利用极值求取方法推算了设备效率函数,减少了掘进设备协同控制的计算量,从而缩短了控制时间,所以该方法在多设备协同控制的控制时间短。
3.2 设备控制精度测试
在开展设备协同控制时,控制方法的控制精度是证明方法性能的重要测试指标。选取设备掘进机头部轨迹曲线为设备精度控制目标,3种控制方法的设备控制精度测试结果如图4所示。

图4 不同控制方法掘进机头部轨迹测试结果
在协同控制掘进设备时,掘进机头部掘进轨迹与实际轨迹越接近,设备控制的性能越好,反之则越差。由图4可知,本文方法的掘进机头部轨迹与实际掘进机头部轨迹相接近,而文献[3]方法以及文献[4]方法测试出的掘进机头部轨迹与实际的掘进机头部轨迹相差较大,由此可证明本文方法在设备控制时的控制精度高于其他2种方法。
3.3 控制效果测试
开展设备协同控制时,控制效果能够直观地体现出协同控制方法的控制性能。测试3种控制方法协调控制后设备功率振荡幅值,结果如图5所示。
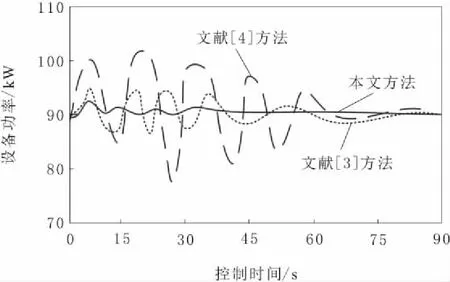
图5 设备控制后设备功率曲线
设备协同控制后,设备功率值浮动越小,说明控制方法的控制效果越好,反之则越差。由图5可知,本文方法在设备协调控制后,测试出的设备功率幅值无大幅度振荡情况,而其他2种方法测试出的设备功率幅值振荡情况明显。由此可证明,本文方法开展设备协同控制后控制效果好。
4 结束语
随着煤炭挖掘设备技能的不断提升,对煤炭掘进配套设备提出多设备协同控制,变得愈加重要。针对传统设备协同控制方法中存在的问题,提出基于考虑任务协作的煤矿掘进配套多设备协同控制方法。该方法依据设备能耗影响因素分析结果,建立煤矿掘进配套设备协同控制模型;通过控制模型获取了设备最佳控制策略,实现了煤矿掘进配套多设备的协同控制。该方法在任务数量较多的情况,存在些许控制误差,今后会针对该项缺陷继续优化此协同控制方法。