直升机半滚倒转机动飞行控制算法研究
2022-11-01郭剑东邓德辉
郭剑东,邓德辉,刘 基
(1.南京航空航天大学中小型无人机先进技术工信部重点实验室,江苏 南京 210016;2.南京航空航天大学自动化学院,江苏 南京 210016)
0 引言
机动飞行可以提高直升机在复杂环境下跟踪和瞄准移动目标,快速改变飞行轨迹,是提升自身突防能力与生存力的重要保障。但直升机机动飞行是非常复杂的运动过程,其中涉及旋翼气动力耦合、飞行动力学建模、飞行控制律设计以及机体结构强度设计等多个技术领域。近年来,直升机研究方向逐渐向高速、高机动发展,常见的直升机机动飞行动作主要有向心回转[1]、障碍滑雪机动[2-3]和转向目标机动[4]等。现有的研究方法包括仿真技术、飞行模拟和机动试飞试验等。直升机机动飞行控制的难点主要包括:机动过程中存在的剧烈耦合,由于直升机本身是耦合性较强的系统,在机动飞行过程中通道耦合更为严重,从而对控制系统提出更高的要求;模型准确度低或模型满足不了机动飞行包线要求,主要因为直升机建模准确度低导致边界求解问题以及建模不确定扰动,影响机动飞行难以实现;控制模态切换方法复杂,直升机不同于固定翼等飞行器,飞行模态更为复杂,在机动飞行控制策略设计时,通道控制模态划分不合理会直接导致直升机受力平衡破坏甚至有坠机风险。
针对直升机机动飞行面临的实际问题,加州大学与斯坦福大学的无人直升机团队[5-6]针对无人直升机机动飞行开展一系列飞行试验,根据引导手的操作经验进行参数化分析,采用动态规划以及强化学习的控制方法,实现了无人直升机的向心回转、大角度横滚和筋斗等机动动作的飞行试验,验证了机动控制方法的有效性;Nodland等[7]将神经网络与反步法相结合,实现了无人直升机的向心回转机动;Ngo等[8]采用模型预测控制,实现了舰载直升机的着舰和横向机动定位;Ma等[9]针对直升机非线性等特点,采用非线性动态逆控制,实现了直升机的水平转弯、爬升转弯和紧急返航的机动动作设计;Kopyt等[10]采用LQR控制,开发了一套全自主飞行控制系统,并以直升机障碍滑雪机动验证了该系统的可靠性;Yu等[11]针对外部干扰和复杂的内部耦合等问题,分别用自抗扰控制和基于扰动观测器的控制方法实现了无人直升机的障碍滑雪机动。
本文针对直升机半滚倒转机动飞行开展了分析。
1 半滚倒转机理分析
半滚倒转机动是一种以高度补偿速度、快速转向实现反向飞行的机动动作,由斜后方被动攻击转为前向主动攻击位置。整个过程可以描述为:直升机平飞进入,随后滚转180°,接着俯冲拉起,达到期望俯仰角后改出,实现飞行方向180°转向,并迅速降低高度同时积累较大的前飞速度,最后以平飞状态进行格斗。整个过程可以分解为进入段、半滚段、俯冲拉起段以及改出段,半滚段相当于半个横滚机动。整个半滚倒转机动过程如图1所示。

图1 半滚倒转机动
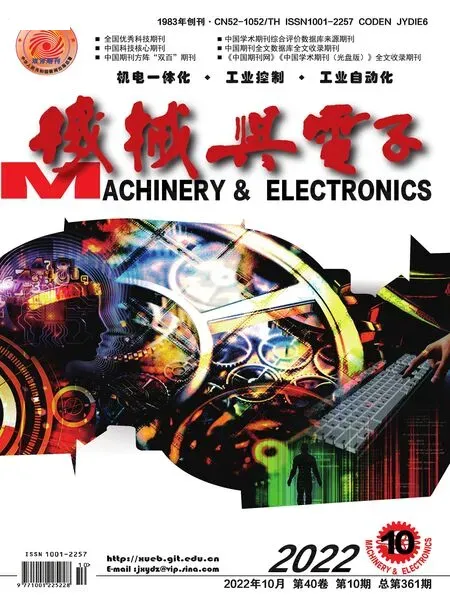
半滚倒转机动中的横滚机动如图2所示。这一机动动作在半滚倒转机动中主要用于“躲避攻击”的作用,直升机以螺旋前进的方式完成滚转,使得尾追的敌机难以预测直升机飞行轨迹导致难以瞄准并发射武器。在实际飞行过程中,主旋翼拉力矢量的变化导致侧向速度以及高度的变化,机动过程中垂向通道需要根据滚转角进行补偿,使横滚结束后快速减小侧向速度。
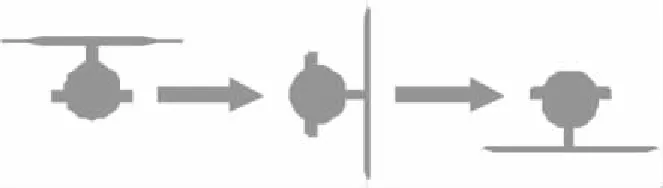
图2 横滚机动
半滚倒转机动中的俯冲拉起如图3所示,主要控制纵向周期变距向下俯冲与拉起,实现高度下降,前飞速度增加,同时伴随滚转角、偏航角的180°转变。俯冲拉起速度越快,机动能力越强,高度变化量越小,速度增量也越小。该机动过程主要反映直升机在纵向平面的机动性能,对机体的结构、强度以及过载能力要求较高,同时由于在半滚阶段中产生了侧向速度,使横向位置出现侧偏。
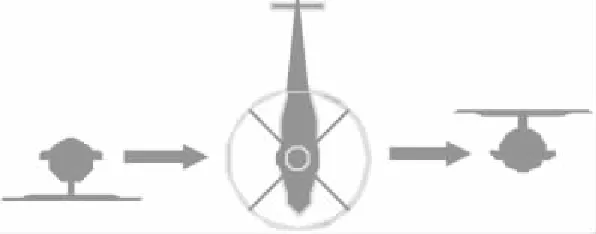
图3 俯冲拉起
根据半滚倒转机动动作分析可以看出,整个机动过程可以分解为4个阶段:进入段、半滚段、俯冲拉起段和改出段。其中,半滚段和俯冲拉起段是整个机动过程的核心部分。将每个阶段的飞行模态进行分解从而得到直升机4个操纵通道的控制律。
a.进入段。直升机保持当前高度、当前速度,横向采用位置保持。即纵向通道采用速度保持控制;横向通道采用位置保持控制;航向通道采用偏航角保持控制;垂向通道采用高度保持控制。
b.半滚段。为了减小控制模态切换过程中通道之间的耦合以及控制指令切换导致跳变,将半滚段分解为2段进行控制律设计。在半滚段的第1阶段,滚转角从0~-90°变化时,纵向通道采用俯仰角控制;横向通道采用滚转角速度控制;航向通道采用偏航角控制;垂向通道采用总距直接控制。在第2阶段,当滚转角从90°~180°变化时,纵向采用俯仰角速度控制;横向通道采用滚转角速度控制;航向通道采用偏航角速度控制;垂向通道采用总距直接控制。
c.俯冲拉起段。为了解决俯仰拉起过程中俯仰角穿越-90°时偏航角和滚转角发生180°跳变带来的影响,将该过程分解为2个控制阶段。在第1阶段,俯仰角从0~-90°变化时,纵向通道采用俯仰角速度控制;横向通道采用滚转角速度控制;航向通道采用偏航角速度控制;垂向通道采用总距直接控制。在第2阶段,当俯仰角从-90°~0变化时,纵向通道采用俯仰角速度控制;横向通道采用滚转角控制;航向通道采用偏航角控制;垂向通道采用总距直接控制。
d.改出段。由于半滚段产生了横向速度,在改出段消除产生的横向速度。因此,纵向通道和横向通道采用速度控制;航向通道采用偏航角控制;垂向通道采用高度控制。
综上所述,直升机半滚倒转机动飞行过程的控制策略如图4所示。
图4 半滚倒转机动控制模态切换策略
2 机动控制模态设计
2.1 进入段控制律
进入段主要目的是使直升机达到期望的高度与前飞速度,对该阶段的飞行模态进行分解得到4个通道的控制律[12],即
(1)

2.2 半滚段控制律
在该飞行阶段,直升机以螺旋前进的方式完成滚转。由于飞行过程中主旋翼拉力方向变化会导致侧向速度以及高度的变化,因此半滚机动过程中垂向通道需要根据滚转角进行补偿,横滚结束后需要尽快减小侧向速度,半滚段控制律根据滚转角幅值变换范围进一步分解成2个阶段。
滚转角从0~90°变化时,4个通道的控制律为
(2)
p0为期望滚转角速度;δc为总距指令,由滚转角φ、正飞悬停总距δc0以及倒飞悬停总距δc1确定。
滚转角从90°~180°变化时,4个通道的控制律为
(3)
2.3 俯冲拉起段控制律
俯冲拉起段主要通过控制纵向周期变距完成,在俯冲拉起的过程中,直升机的姿态呈现先低头后逐渐抬头的变化过程,当俯仰角达到极点时(-90°),滚转角由180°变换为0,偏航角由机动前ψ0变化为ψ0-180°。为了避免俯仰角极点问题,同时保证总距连续性变化,将该过程中分解为2个阶段,根据俯仰角幅值范围进行模态切换。
俯仰角从0~-90°时,4个通道的控制律为
(4)
q0为期望俯仰角速度;δc为总距指令,由俯仰角θ以及正、倒飞悬停总距确定。
俯仰角从-90°~0时,4个通道的控制律为
(5)
2.4 改出段控制律
在该阶段直升机已处于常规飞行状态,因此纵向通道以速度控制为外回路;为了消除横向通道机动过程中的侧向速度,以侧向速度控制为外回路,航向通道为航向角保持控制,垂向通道保持改出后的高度控制。4个通道的控制律为
(6)

3 综合视景仿真验证
直升机在机动飞行过程中,气动与操纵耦合严重,强非线性特性导致机理建模精度较低,因此本文采用了FlightGear跨平台飞行模拟软件的内置UH-60直升机模型,通过UDP数据通信接口,定制传输数据协议,建立与Simulink控制模型的通信机制[13],用于验证本文控制律以及控制模态切换的合理性。
3.1 仿真环境搭建
半滚倒转机动仿真环境如图5所示。系统仿真环境由控制模态和视景模型2个部分组成,图5左侧主要根据对机动飞行机理分析与控制策略设计,完成机动指令生成、控制模态切换以及风扰作用输入等,通过UDP通信方式将指令打包发送到视景模型,同时接收模型的状态参数用于反馈控制;图5右侧主要接收控制模态的控制指令,完成直升机机动飞行,并实时显示直升机的飞行状态。

图5 半滚倒转机动仿真环境
在Simulink环境中设计的数字控制仿真模型结构如图6所示。其中,模块①为数据接收模块;模块②为机动策略模块, 包括控制模态的选取以及机动指令的生成;模块③为控制回路模块,包括位置回路、速度回路、姿态回路、角速度回路和配平限幅;模块④为数据发送模块;模块⑤为实时时间获取模块;模块⑥为三维轨迹绘制模块;模块⑦为飞行状态显示模块。

图6 数字控制仿真结构
3.2 仿真结果分析
对直升机半滚倒转的控制律设计以及机动控制策略开展仿真验证,直升机半滚倒转视景如图7所示。半滚倒转机动分为进入段、半滚段、俯冲拉起段和改出段,其中半滚段飞行过程中某角度如图7a所示,从图7a中可以看出,在半滚段直升机保持前飞速度的同时滚转角逐渐增加直至进入倒飞状态。直升机半滚结束后紧接着控制模态切换至俯冲拉起段,飞行如图7b所示,从图7b中可以看出,直升机在俯冲拉起阶段,俯仰角经过-90°极点,在该过程中高度迅速下降,速度快速增加;俯冲拉起完成后控制模态切入改出段,直升机以平飞状态前飞。

图7 直升机半滚倒转视景
直升机在进入段给定期望高度200 m,前飞速度10 m/s,进入段结束后开始进行半滚段机动飞行,给定半滚段期望滚转角速度为60 (°)/s,当直升机处于倒飞状态,给定期望俯仰角速度60 (°)/s进行俯冲拉起机动,当姿态达到水平状态后保持平飞,完成半滚倒转机动飞行。同时在机动飞行过程中引入4 m/s前向风扰,对半滚倒转机动过程进行控制器抗扰性能对比。整个半滚倒转机动过程完成时间约4.5 s,图8为横向通道的滚转角和滚转角速度响应曲线,约2.3 s左右完成半滚机动,滚转角由0到接近180°变化,滚转角速度响应快,同时从图9a可以看出直升机俯仰角逐渐减小,而图8a中滚转角跳变到-180°,直升机进入倒飞状态,紧接着进入俯冲拉起,滚转角迅速增加到0,由于该过程时间短,因此滚转角速度存在较大脉冲响应;增加前向风扰作用,对俯冲拉起段的滚转角变化产生一定的影响,但作用较弱。
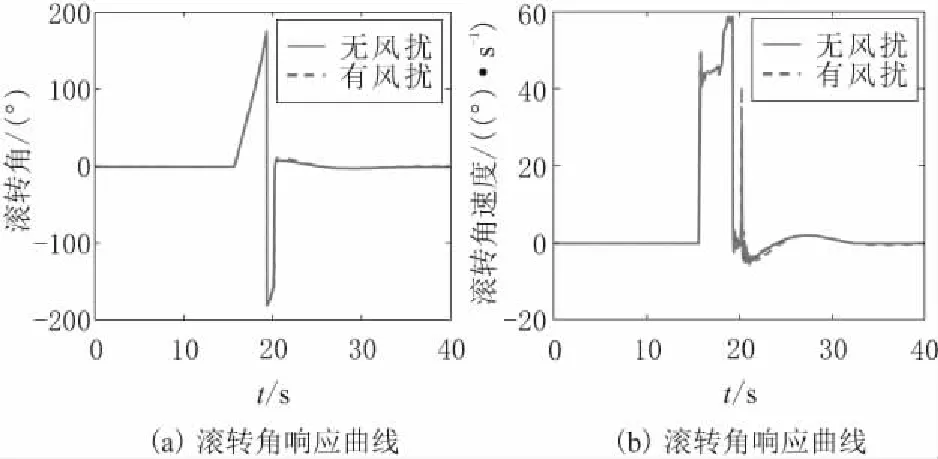
图8 横向通道响应
图9为纵向通道的俯仰角和俯仰角速度响应曲线,在滚转开始俯仰逐渐低头,俯冲拉起段用时约2.2 s,通过数据分析可得在俯冲拉起段俯仰角从-60°左右开始逐渐减小-90°,穿越-90°后逐渐拉起至水平姿态;由于俯仰角作为速度的内环,增加风扰后对俯仰角以及俯仰角速影响较小。
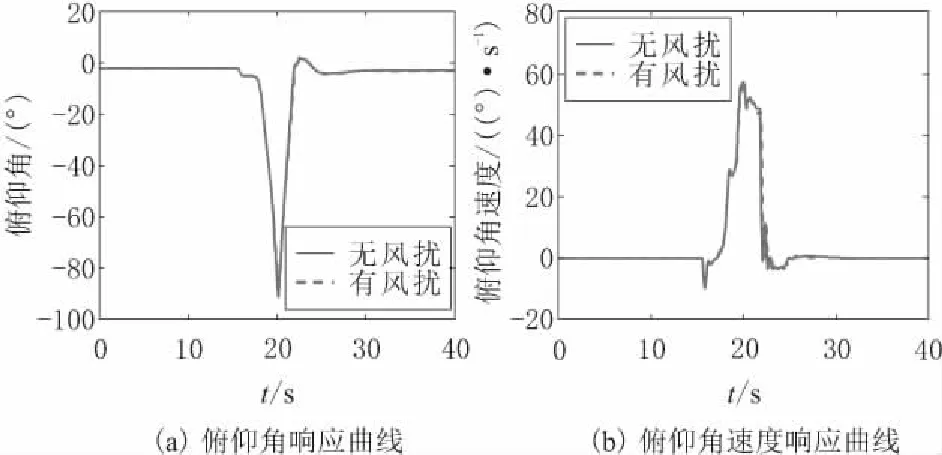
图9 纵向通道响应
图10为垂向通道的高度和体轴系垂向速度响应曲线,可以看出在半滚倒转机动俯冲拉起段高度变化量约为106.2 m左右,体轴系最大高度变化率达到39.7 m/s(向下为正),俯冲拉起段完成后垂向通道控制模态切换为高度保持控制,高度响应能够快速收敛到稳态;由于增加前向风扰的作用导致地速增加,在滚转的过程中速度分量增大,导致机动过程掉高增加,高度变化量达到113.5 m,体轴系最大垂向速度达到了42.9 m/s。

图10 垂向通道响应
图11为速度与航向通道的地速和偏航角响应曲线,由图11a可以看出俯冲拉起段结束后,地速从10 m/s增加至41.9 m/s,实现了半滚倒转的“以高度换速度”的目的,同时能够保持地速稳定跟踪控制;加入风扰后地速增加到50.45 m/s。由图11b可以看出直升机由机动前0转变为180°或-180°,即实现了直升机快速航向倒转,使直升机由被动打击转为主动攻击状态;加入前向风扰对航向通道影响较小。

图11 速度与航向通道响应
4 结束语
通过对直升机半滚倒转机动飞行仿真数据分析可知,整个半滚倒转机动的控制策略以及机动指令设计合理,验证了机动飞行控制策略以及控制律的有效性。同时也可以看出直升机在持续滚转过程中,由于旋翼矢量倾转,导致直升机在滚转的过程中俯仰角姿态难以保持,特别当滚转角大于90°后,纵向通道采用俯仰角速度控制,导致俯仰角减小速度增加,即直升机难以维持水平飞行状态。