认知分心下车辆运行参数时域和频域特性分析
2022-11-01谷梦路黄晓梦
施 雯,谷梦路,黄晓梦
(1.陕西青年职业学院,陕西 西安 710068;2.长安大学汽车学院,陕西 西安 710064)
0 引言
一般将驾驶分心分为视觉、听觉、操作分心和认知分心[4-5],不同种类的驾驶分心都会伴有认知分心,其本质是驾驶人认知通道的占用导致驾驶人可以分配到驾驶主任务上的注意力减少。
研究驾驶人分心驾驶状态常用的参数有眼动参数[6]、操作反应时间[7-8]、方向盘回转率[9-11]、速度控制能力[12-14]和车道保持能力[15-20]等驾驶绩效指标。研究表明,驾驶分心会使驾驶人对车辆的横、纵向操控能力变差[21]。
在以往的驾驶分心研究中,在车辆驾驶绩效参数特征方面,只考虑了参数的时域特征,没有考虑该参数在相应的驾驶状态下相应时间内频域信息的组成及变化。本文主要研究认知分心对驾驶人方向盘操控特性、车辆运行参数的影响,以及不同参数时域和频域变化特征。方向盘转角和方向盘角速度的变化直接反映驾驶人对车辆的操控特征,横向加速度、纵向加速度和横摆角速度反映车辆的运行特征。研究认知分心下车辆参数的频域特征,可以更加完善地得到驾驶人认知分心驾驶下车辆的运行状态特征。
1 实验设计
为研究认知分心对车辆操控能力以及车辆运行状态的影响,开展了实车道路驾驶实验。实验过程中,为驾驶人施加不同的认知分心任务,以方向盘转角和方向盘角速度作为表征驾驶操作的参数,以横向加速度、纵向加速度和横摆角速度作为车辆运行特征参数,通过相关传感器设备和录像设备获取实验数据、记录实验过程,用采集到的数据分析不同等级的认知分心对驾驶人方向盘操作行为的影响。
1.1 实验路线
实验路线选择西安市内城市快速路西太路直线路段,路段双向六车道,限速80 km/h,交通流量实际观测值约为700 vph,实验路段全线封闭,除起点和终点位置可进行掉头之外(由交通信号灯控制的可掉头十字路口),全线无车辆掉转、行人横穿情况,避免了突发事件对实验的影响。实验路线及道路实景如图1所示。

图1 实验路线及道路实景
1.2 实验设备和被试驾驶人
搭建了装载多路传感器的驾驶行为特征提取实验车,该车辆装载了视频采集系统、方向盘传感器、陀螺仪和VBOX 3i GPS主机等设备,各设备的采集参数如表1所示。
表1 实验设备及采集参数
由于真实道路分心驾驶实验的特殊性,只招募了6名驾龄6 年以上、驾驶里程60 000 km以上的熟练的驾驶人作为被试人员,并为每位被试驾驶人和实验人员购买了中国平安保险的短期综合意外险中的基础款保险。
自2002年以来,云、贵、川三省体育局共审批各类比赛4 123项,承办各类比赛近4 000余项。2020东京奥运会临近前,各类项目测试也在陆续开展,这些高层次的大型体育赛事不仅在一定方面满足了三省居民的多样化需求,同时也促进了三省大型体育赛事市场化运作管理的发展。此外,经过这些赛事的锻炼,三省的赛事组织、运作与管理水平也获得了相应提高,为2022年“北京——张家口”冬奥会培养了一大批赛事运作与管理人才。
1.3 认知分心驾驶次任务
根据长安大学袁钰[22]的静态模拟实验结果,用于模拟认知分心的数学计算、数字记忆认知分心可以囊括不同等级和类型的认知分心,并且非常适合代替真实驾驶时的分心情况。本文选用简单计算(不带进、借位的100以内加减法)、复杂计算(带进、借位的100以内加减法)和短时记忆(11位手机号码的记忆)作为3种认知分心次任务。简单计算、复杂计算和短时记忆对应的认知分心程度依次提增高。
在所选择的城市快速路实验路段,由实验工作人员在副驾驶位置口头向被试驾驶人陈述认知分心驾驶次任务,并记录相应次任务下被试驾驶人完成的准确率。经统计表明,所有被试驾驶人对所施加的认知分心次任务的回答准确率大于85%,表明被试驾驶人有效投入到了认知分心驾驶次任务当中,保证了实验的可靠性。
1.4 实验数据
实验过程中每名被试驾驶人各进行正常驾驶和分别施加简单计算、复杂计算、短时记忆认知分心次任务的驾驶过程,后续称之为正常驾驶、简单计算、复杂计算和短时记忆4种驾驶状态。不考虑驾驶人之间的异质性,剔除无效样本,共得到52个驾驶过程样本,其中,每种状态的样本13个,4个驾驶状态的累计时长分别为1 333 s、1 300 s、1 323 s、1 383 s,总计时长5 339 s。
分别统计了每种驾驶状态下驾驶过程中车辆方向盘转角、方向盘角速度,以及横、纵向加速度,横摆角速度的值。
2 认知分心参数的频谱特性分析
频谱分析实际就是利用傅里叶变换对信号进行处理,将信号随时间变化的表达式转变为随频率变化的表达式即将时域信号转化为频域信号。信号的幅值信息与相位信息可通过傅里叶变换得到。以往在驾驶认知分心车辆参数特性研究中,只考虑了参数的时域特征信息,并没有考虑相应时间内不同驾驶状态参数的频域特征。因此,本研究利用MATLAB中傅里叶变换工具箱,对正常驾驶、简单计算、复杂计算和短时记忆4种驾驶状态下车辆的方向盘转角、方向盘角速度、横向加速度、纵向加速度和横摆角速度进行傅里叶变换,得到相应时间段内不同驾驶状态下不同参数的频域特征。
2.1 方向盘转角
方向盘转角幅值变化的快慢与大小直接影响车辆行驶的横向稳定性。为了从频域的角度研究方向盘转角变化情况,利用快速傅里叶变换将方向盘转角从时域转换到频域中进行频谱分析。图2为被试驾驶人在正常驾驶和3种分心驾驶状态下的方向盘转角时域图与对应的频谱图(其他被试驾驶人的方向盘转角幅值情况与之类似)。图2a~图2d的驾驶状态分别为正常驾驶、简单计算、复杂计算和短时记忆。
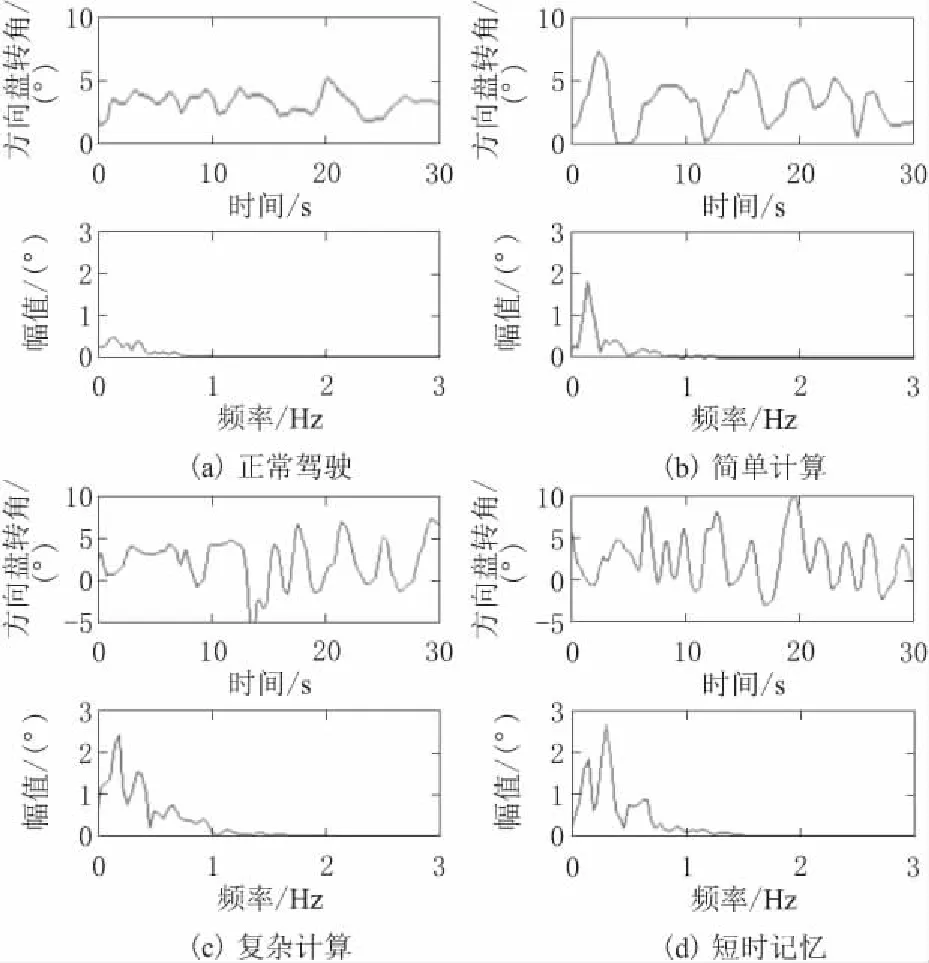
图2 不同驾驶状态下的方向盘转角时序图与频谱图
由方向盘转角时序图可知,正常驾驶时方向盘转角变化非常平缓,方向盘转角在1~5°内变化;简单计算情况下方向盘转角的波动明显比正常驾驶时大,但是整体而言比较稳定;复杂计算情况下方向盘转角变化明显加快并且变化幅度增大,在-2~7°之间变化;短时记忆与复杂计算情况类似,方向盘回转率明显增大且转角变化幅度在3种分心驾驶中最为严重,在-2~10°之间变化。此结果与史盛庆[23]和Ranney等的研究结果一致:史盛庆研究发现,驾驶人脑负荷越严重,方向盘转动的次数越大;Ranney等根据模拟器实验发现,驾驶人在执行次任务时对方向盘的控制能力降低,方向盘回转率增加。
从不同驾驶状态的频谱图可知,方向盘转角信号主要集中在低频部分(0~0.2 Hz),但是相比于正常驾驶,在分心驾驶状态下低频部分的幅值有增大的趋势,并且高频部分的信号幅值也明显增大,短时记忆的驾驶状态时这一现象尤为明显。直线路段上转向操作的频率与幅度相对都较小,因此反应在频域上表现为以低频信号为主(0~0.3 Hz),但当驾驶分心时,由于驾驶人对方向盘的控制能力下降,导致转向操作的幅度变大,因此需要不断调整方向盘,所以方向盘转角频谱的幅值偏大,且开始出现较高频信号(0.5~1 Hz)。
2.2 方向盘角速度
方向盘角速度直接表现了转向的快慢。为了从频域的角度研究方向盘角速度的变化情况,利用快速傅里叶变换将方向盘角速度幅值从时域转换到频域中进行频谱分析。图3为1名被试驾驶人在正常驾驶与3种分心驾驶状态下的方向盘角速度幅值时域图与对应的频谱图。图3a~图3d的驾驶状态分别为正常驾驶、简单计算、复杂计算和短时记忆。
从角速度的时序图可知,在正常驾驶情况下角速度的变化较平稳,简单计算时有时出现角速度突然变大的情况,复杂计算角速度突变情况较多,短时记忆时突变出现的次数虽然减少但是突变的幅度最大。驾驶人受认知分心影响,突然转向增多,引起方向盘角速度增大且离散度增强。此结果与石涌泉[24]的研究类似,石涌泉研究表明驾驶人在正常驾驶时以平稳的角速度操作,但是在认知分心时以较大角速度离散操作的趋势增大。

图3 不同驾驶状态下的角速度时序图与频谱图
从不同驾驶状态的频谱图可知,角速度频谱图中以低频信号为主(0~0.5 Hz)。正常驾驶时幅值较低,分心驾驶时幅值有增大的趋势,并且分心驾驶时较高频区域的幅值有增加的趋势,这与方向盘转角的变化规律比较相符。
2.3 横摆角速度
横摆角速度是车辆围绕垂直轴偏转速度的大小,是表征汽车横向操纵稳定性的重要指标。车辆横摆角速度的变化是由驾驶人对方向盘的操纵引起的。图4为1名被试驾驶人在正常驾驶与3种分心驾驶状态下的横摆角速度幅值时域图与对应的频谱图。图4a~图4d的驾驶状态分别为正常驾驶、简单计算、复杂计算和短时记忆。

图4 不同驾驶状态下的横摆角速度时序图与频谱图
从横摆角速度的时序图可知,在正常驾驶情况下横摆角速度的变化比较平稳,在-1(°)/s~0之间变化;简单计算时横摆角速度的变化幅度虽然增加了但是变化比较平缓,在-2(°)/s~0之间变化;复杂计算与短时记忆时横摆角速度的变化比较剧烈且变化幅度明显增加,在-3~1(°)/s之间变化。情况与方向盘转角情况相符。
从不同驾驶状态的频谱图可知,横摆角速度频谱图中以低频信号为主(0~0.5 Hz),正常驾驶时幅值较低,分心驾驶时幅值有增大的趋势。正常驾驶时,横摆角速度主要集中在低频区域,在分心驾驶时横摆角速度在较高频区域的幅值有所增加。
2.4 纵向加速度
纵向加速度直接表征速度变化的快慢。为了从频域的角度研究纵向加速度的变化情况,利用傅里叶变换将纵向加速度幅值从时域转换到频域中进行频谱分析。图5为1名被试驾驶人在正常驾驶与3种分心驾驶状态下的纵向加速度幅值时域图与对应的频谱图。图5a~图5d的驾驶状态分别为正常驾驶、简单计算、复杂计算和短时记忆。
从纵向加速度的时序图可知,在正常驾驶情况下纵向加速度的变化比较平稳,在3种分心驾驶的情况下纵向加速度时快时慢不稳定性增加。从不同驾驶状态的频谱图可知,纵向加速度频谱图中以低频信号为主(0~0.5 Hz),正常驾驶时幅值较低,分心驾驶时幅值有增大的趋势。实验要求驾驶人尽量在50 km/h左右的速度下行驶,所以驾驶人在执行次任务时,速度可能超出实验要求的范围,因此驾驶人会不断调整操作加速踏板或者制动踏板以使速度维持在一定的区间内,因此在分心驾驶时纵向加速度时快时慢,且变化急促。此结果与顾高峰研究类似,顾高峰研究发现驾驶人在执行次任务时对加速踏板的控制能力降低,加速度变化幅度增大。
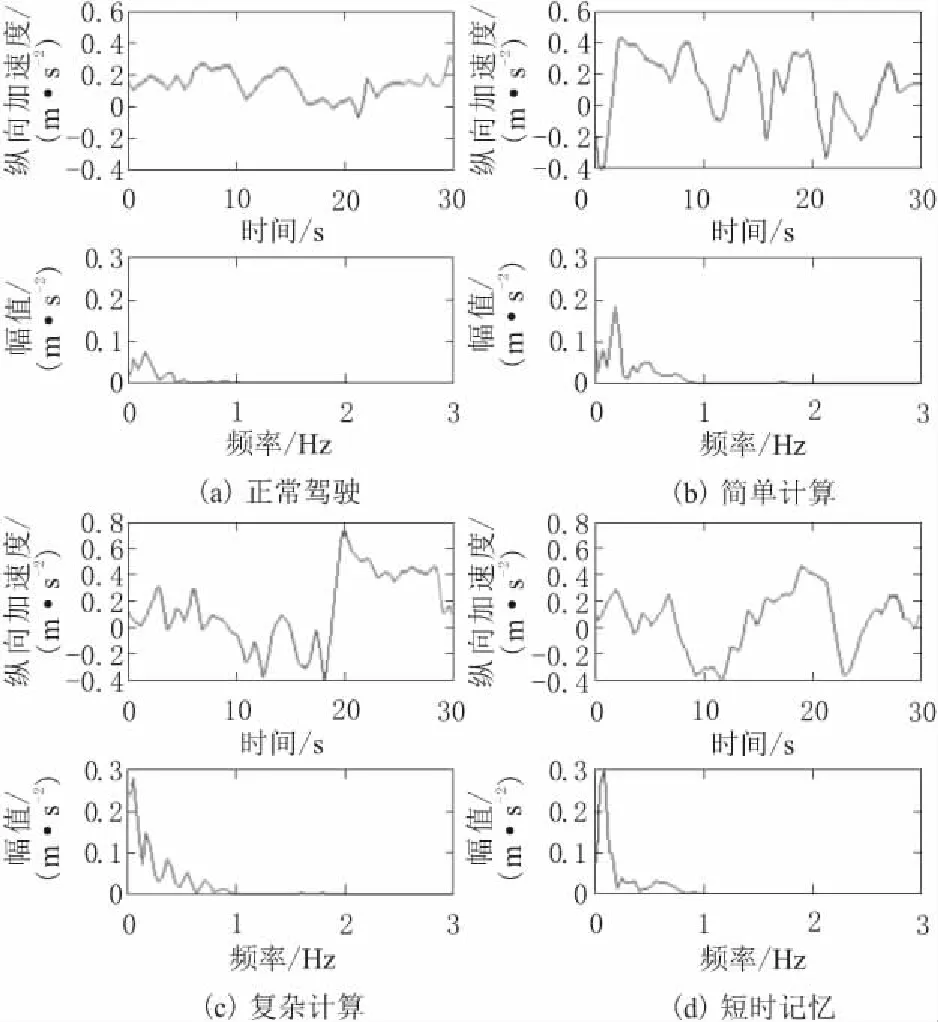
图5 不同驾驶状态下的纵向加速度时序图与频谱图
2.5 横向加速度
横向加速度表征车辆的横向稳定性。利用傅里叶变换将横向加速度幅值从时域转换到频域中进行频谱分析。图6为1名被试驾驶人在正常驾驶与3种分心驾驶状态下的车辆横向加速度幅值时域图与对应的频谱图。图6a~图6d的驾驶状态分别为正常驾驶、简单计算、复杂计算和短时记忆。
从横向加速度的时序图可知,在正常驾驶情况下横向加速度的变化比较平稳,在0~0.4 m/s2的区间内变化,但是在3种分心驾驶的情况下横向加速度有变大的趋势并且变化时快时慢不稳定性增加,尤其是在进行短时记忆的次任务时变化尤为明显,在0.2~0.5 m/s2之间变化。
从横向加速度在不同驾驶状态时的频谱图可知,横向加速度频谱图中以低频信号为主(0~0.5 Hz),正常驾驶时幅值较低,分心驾驶时幅值明显增大,尤其是短时记忆时,幅值明显增大,并且在分心驾驶时,较高频带幅值有增大的趋势。
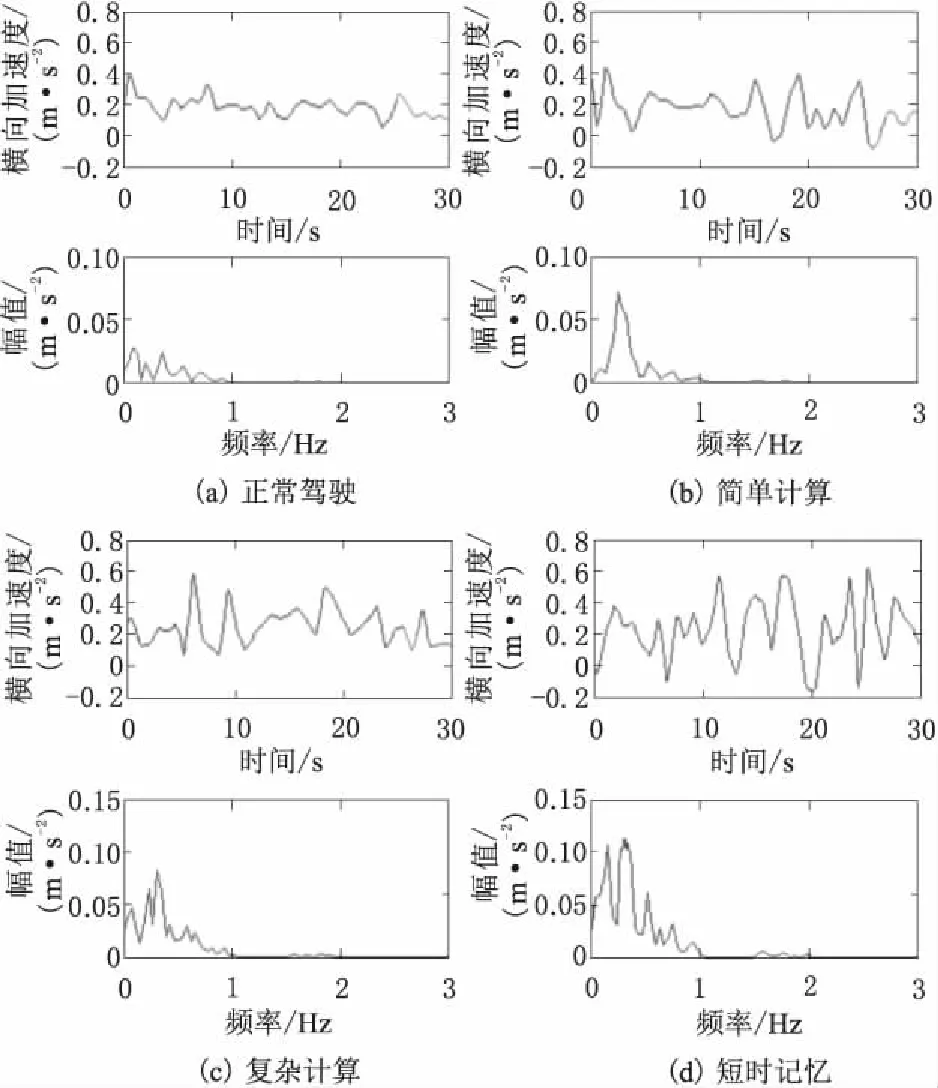
图6 不同驾驶状态下的横向加速度时序图与频谱
3 结束语
本文设计了认知分心驾驶次任务并进行了城市快速路实车道路认知分心驾驶实验,采集了正常驾驶状态和3种认知分心驾驶状态下方向盘转角、角速度、横摆角速度、纵向加速度以及横向加速度参数。对参数进行傅里叶变换得到各参数在不同驾驶状态下的幅值谱,并对各参数进行时域分析得出了不同参数在不同驾驶状态下的特点。认知分心时驾驶人反应变慢使得方向盘转角、角速度、纵向加速度等参数变化稳定性降低,突变情况增多,且分心程度较深时突变更加严重。各参数信号主要集中在低频区域,认知分心时有向较高频区域移动的趋势,且认知分心时各参数幅值均有明显增加,分心越严重增加越显著。