基于机器人检测的引水隧洞结构缺陷特征分析
2022-11-01武彬马芳平陈勇旭金恩华刘育谢辉李正文
武彬, 马芳平, 陈勇旭, 金恩华, 刘育, 谢辉, 李正文
(1.国能大渡河猴子岩发电有限公司, 康定 626100; 2.国能大渡河流域水电开发有限公司, 成都 610041; 3.清华四川能源互联网研究院, 成都 610071; 4.清华大学水沙科学与水利水电工程国家重点实验室, 北京 100084)
引水隧洞是水利水电工程引水发电及水资源调度的重要建筑物。据统计,中国已建成各类引水隧洞总长度超过500 km,4 km以上的引水发电隧洞20余座,更多20 km乃至100 km以上的引水隧洞规划建设[1]。水工隧洞深埋地下,地质条件十分复杂,除承受较大的围岩压力外,还包括较高的内、外水压力,常年运行可能会出现裂缝、塌方、漏筋等典型缺陷,而当前引水隧洞的设计建设普遍未考虑后期日常巡检需求,其运行期安全检查一直是国内外的一大难题。目前,行业普遍采用人工定期对引水隧洞放空检查,存在巡检不及时、作业风险高、人力需求大、检测周期长、数据随机性大等问题,并且,洞内无光、有积水环境下,人工巡检存在很多检测死角,大坡度斜井段通常难以覆盖,更无法形成客观、精准、完整的检测成果,较难对引水隧洞结构存在缺陷和隐患做到及时全面的发现和消除,严重制约了引水隧洞的运维和管控。因此,采用创新手段对引水隧洞进行智能化检测是行业发展的趋势。
当前,随着人工智能行业的发展,机器替人进行水工建筑物安全巡检在水利行业中得到广泛应用。 Carneiro等[2]针对引水隧洞检测任务,研发了一种缆控遥操作的新型遥控水下机器人(remotely operated vehicles,ROV),采用水下摄像机和声呐来检测混凝土壁面的破损以及堆积物,并通过仿真实验与实物试验,验证了新型ROV在引水隧洞应用中的可操控性。来记桃[3]将有缆遥控潜水器水下检测技术应用在锦屏二级水电站引水隧洞,采用实时三维成像声呐和光学摄像相结合的方法,完成了大直径、长引水隧洞表观全覆盖水下综合检测。王文辉等[4]研制出可在高水头引水隧洞超过2 km距离范围内稳定航行检测的水下机器人,通过现场试验及在多个水电站的实际应用证明了水下机器人在引水隧洞远距离航行检测时的稳定性。杨文果等[5]提出了一种基于惯性导航系统(inertial navigation system, INS)与前视声呐组合的引水隧洞机器人巡检定位方法。Wang等[6]结合引水隧洞的巡检成果,分析了引水隧洞裂缝、钙化等典型损伤特征及分布规律。文献[7-10]分别对机器人巡检在引水隧洞中的应用进行了研究。相关研究成果总结了引水隧洞的特点及巡检的难点,攻克了机器人巡检部分关键技术,也取得了初步的探索性创新成果。然而,对于引水隧洞斜井段的巡检依然存在较大调整,巡检数据的客观分析成果相对较少,不同结构段引水隧洞的缺陷分布规律需要更进一步研究。
因此,现结合猴子岩水电站引水隧洞上平段、斜井段、下平段等不同结构形式的机器人巡检数据成果,通过数据拼接获得缺陷走向、方位的位置信息,在此基础上,分析引水隧洞结构缺陷分布规律,解决引水隧洞表观缺陷形态不规则、分布不均、多种缺陷共存的难题,保障引水隧洞安全评价的客观性、准确性,为引水隧洞结构健康评估与除险加固提供数据支撑,对提高电站安全运行水平和提升电站智能化运营能力具有重要的科学意义与应用价值。
1 引水隧洞巡检方法
1.1 工程背景
猴子岩水电站位于四川省甘孜藏族自治州康定市境内大渡河干流上游,上游为丹巴水电站,下游为长河坝水电站。电站工程规模为一等大(1)型,是一座混凝土面板堆石坝,最大坝高223.5 m。工程开发任务为发电,总装机容量170万kW·h,多年平均年发电量73.64亿kW·h。电站主要枢纽建筑物由拦河坝、两岸泄洪及放空建筑物、右岸地下引水发电系统等组成。
猴子岩引水隧洞为右岸地下引水发电系统的重要建筑物,共布置4条斜井式压力管道,管道间平行布置,洞径为10.50 m。压力管道沿纵轴线分为渐变段、上平段、上弯段、斜井段、下弯段、下平段、锥管段及过渡段等,管道长544.87~628.64 m,总长2 347.01 m。猴子岩水电站引水隧洞在地下洞室群中的分布及不同结构段尺寸如图1所示。

图1 猴子岩水电站引水隧洞分布及结构尺寸图[11]Fig.1 Distribution and structural dimensions of diversion tunnel of Houziyan Hydropower station[11]
1.2 巡检设备
针对猴子岩引水隧洞的巡检需求,采用爬行机器人搭载三维激光扫描仪及微光高清摄像设备进行巡检。特种爬行机器人系统的潜器单元为各种检测传感器等集成的运动平台,地面控制单元通过脐带缆将动力和控制命令下传到爬行器单元,将获取的传感器数据上传到地面控制单元,地面控制单元控制爬行器单元的运动、灯光、调节搭载的传感器,显示并记录检测数据。主要技术指标如表1所示。

表1 主要技术指标Table 1 Main technical indicators
巡检机器人搭载的三维激光扫描具有实时性、主动性、适应性好的特点。利用三维激光,全景测量的成果形成隧洞三维模型,并在三维模型的基础进行监测、检测、调查等相关数据分析。
1.3 巡检方案
猴子岩水电站引水隧洞放空状态下内部全段黑暗无光且湿滑,上平段底部约有5 cm的积水,局部存在点状、线状裂缝渗水等现象,其中洞顶、洞洞底、渗水较为明显;斜井段因上游大量渗水汇集而下故底部水流量增大且流速较快;下平段因检测时水泵停止抽排故积水达1.5 m以上,不具备检测条件。洞壁局部存在滴水、涌水现象,洞底湿滑。巡检现场作业如图2所示。

图2 巡检机器人现场作业图Fig.2 Field operation diagram of inspection robot
本次巡检采用巡检机器人搭载微光高清摄像设备及三维激光传感器,结合云台控制实现对引水隧洞混凝土结构进行全覆盖扫描检测工作。通过专业高空吊篮设备将检测装备吊放至引水隧洞内,对上弯段、斜井段及下弯段部位引水隧洞表面进行全覆盖扫描检测,查明裂缝、渗水、结构缝淘刷、钢筋头等详细情况。
2 检测成果数据处理
2.1 数据处理
三维重建主要是利用特定算法对图像序列进行特征提取与匹配,并结合图像特征实现稠密重建,最终利用点云网格化与纹理映射得到所需的三维模型。数据拼接方法为特征点云拼接法,具体可简述为:相邻两站数据通过一定数量的相同特征点云进行拼接,第一站作为基准站,依次完成各测站的数据拼接,最终将各测站数据拼成一个整体。
将已经拼接完成的三维点云模型导入相关处理软件中,沿隧洞三维点云中轴线展开,再根据激光反射率的强弱将带有信息的缺陷对应进行标注,制作正射影像图。数据处理流程及正射影像图如图3所示。图3中上下两侧为隧洞洞底展开部位,中间为洞顶部位,洞顶和洞底之间为隧洞的两边墙及洞腰位置。

图3 数据处理流程及正射影像成果Fig.3 Data processing flow and orthophoto results
2.2 缺陷数据解析
根据激光反射率信号强弱和三维坐标进行隧洞缺陷检测和定位,并将带有缺陷信息的激光影像图输出到AutoDesk Navisworks中进行人工校核,最后编辑整理成果,如图4所示。
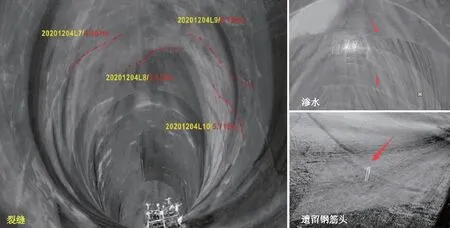
图4 缺陷数据解析示例Fig.4 Defect data analysis example
从上弯段开始,由左至右依次对裂缝和露筋进行命名,裂缝的标识字母为L,露筋的标识字母为J,混凝土表观冲蚀的标识字母为W,混凝土渗漏点的标识字母为LP,缺陷的命名方法为:日期+工程部位+缺陷标识字母+缺陷编号,如20210419-SPD-L-01表示上平段正射影像图编号为1的裂缝。根据缺陷数据解析,分析引水隧洞缺陷分布规律。
3 引水隧洞缺陷分布规律
3.1 分段检测成果
(1)上平段。通过巡检机器人搭载三维激光扫描仪对猴子岩水电站引水隧洞进行全覆盖扫描检测。整理数据得出,在上平段共发现的67处缺陷中,有50条裂缝渗水和17处混凝土渗漏点。其中顶洞有34处缺陷,左洞腰有18处缺陷,右洞腰有12处缺陷,洞底有3处缺陷。上平段缺陷主要分布在洞顶以及左洞腰、右洞腰附近,主要以裂缝、渗水较为突出,其中有明显水流出或明显渗水现象的裂缝和渗漏点共有33处,其余34处均为轻微渗水现象。上平段典型缺陷检测成果如图5(a)所示。
(2)斜井段。斜井段主要包括上弯段、斜井段、下弯段,发现的34处缺陷中,共有28条裂缝,3处混凝土渗漏点,3处遗留钢筋头。其中顶洞有10处缺陷,左洞腰有9处缺陷,右洞腰有4处缺陷,洞底有11处缺陷。该区间缺陷主要分布在上弯段的洞顶、左洞腰及洞底附近,其中有明显水流出及渗水现象的裂缝及渗漏点共有6处,有轻微渗水现象的裂缝及渗漏点共有25处,其余有3处前期施工遗留钢筋头位于上弯段洞底部位。斜井段典型缺陷检测成果如图5(b)所示。

图5 不同区段缺陷分布正射影像图Fig.5 Orthophoto map of defect distribution in different sections
3.2 检测数据分析
通过整理上平段不同断面位置的缺陷类型及数量,得出表2,并作出上平段裂缝和渗漏点不同位置的对比图如图6所示。可以发现,上平段缺陷主要以裂缝为主,共有50条裂缝。而裂缝大部分分布在洞顶部位,长度在0.38~11.88 m。
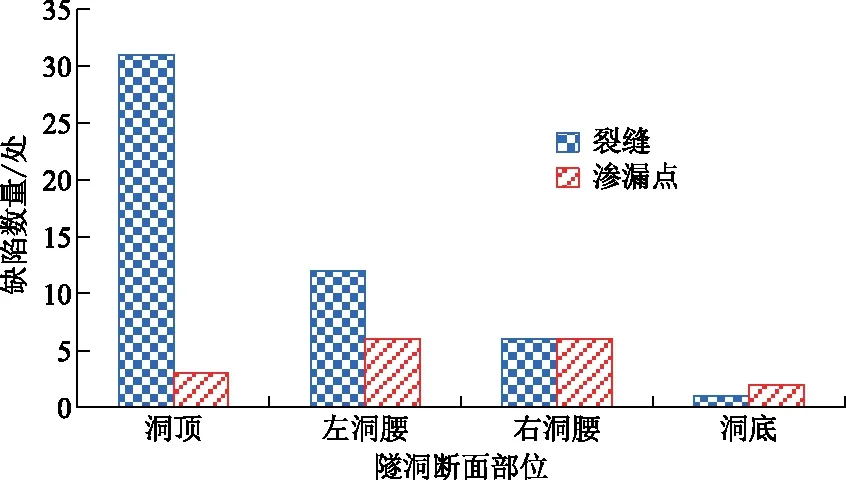
图6 上平段缺陷分布特征对比图Fig.6 Comparison of defect distribution characteristics of upper flat section

表2 上平段缺陷类型与分布表Table 2 Defect types and distribution of upper flat section
整理斜井段不同断面位置的缺陷类型及数量,得出表3,并作出该段裂缝和渗漏点不同位置的对比图如图7所示。可以发现,该段缺陷仍以裂缝为主,隧洞断面不同位置的裂缝数量差别不大,但裂缝主要位于上弯段,下弯段的裂缝数量相当较少。此外,该段还存在部分渗漏点和前期施工遗漏的钢筋头。

图7 斜井段缺陷分布特征对比图Fig.7 Comparison of defect distributioncharacteristics of inclined shaft section

表3 斜井段缺陷类型与分布表Table 3 Defect types and distribution of inclined shaft section
3.3 引水隧洞缺陷分布规律
将引水隧洞上平段和斜井段缺陷进行对比,可以发现,上平段缺陷数量明显多于斜井段,且斜井段的缺陷也主要分布于上平段和斜井段相交的上弯段,说明缺陷集中分布与引水隧洞高程更高的位置,包括上平段和上弯段,而高程较低的斜井段和下弯段缺陷数量相对较少。
将引水隧洞全段缺陷成果统一对比分析,做出不同缺陷类型的数量占比如图8所示。可以发现,所有缺陷中裂缝占比77%,是引水隧洞主要的缺陷类型,裂缝长短不一,出现裂缝的位置常伴有渗水和钙质析出。在后期的工程运行与安全巡检过程中应该主要关注裂缝的扩展情况。

图8 引水隧洞不同缺陷类型对比图Fig.8 Comparison diagram of different defect types of diversion tunnel
为进一步分析裂缝的走向,将上平段和斜井段裂缝按横向、纵向、斜向进行分类对比,如图9所示。其中横向裂缝表示裂缝走向垂直洞轴线,纵向裂缝表示其走向平行洞轴线,斜向则表示与洞轴线大角度向交。由图9可以发现,上平度的裂缝以横向裂缝居多,斜井段的裂缝以斜向裂缝居多,受围压应力与水流特性的影响,上平度和斜井段裂缝走向特性呈现明显的差异。
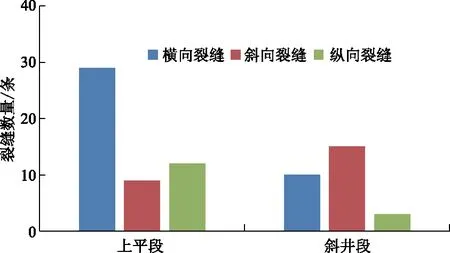
图9 上平段和斜井段裂缝方向对比图Fig.9 Comparison of fracture directions in upper horizontal section and inclined section
4 结论
针对引水隧洞不同结构段的机器人巡检数据成果,通过数据拼接获得缺陷位置、走向、长度等信息,分析引水隧洞结构缺陷分布规律,是智能技术在水工隧洞领域的应用创新,具备显著的研究价值和推广意义,得出如下结论。
(1)采用爬行机器人搭载三维激光扫描仪及微光高清摄像装备进行巡检,可解决隧洞光滑倾斜壁面检查的难题,实现引水隧洞斜井段盲区的安全高效检测。
(2)引水隧洞内存在的缺陷包括裂缝、渗漏、漏筋等,而裂缝是引水隧洞主要的缺陷类型。隧洞内不同区段缺陷数量差异较大,上平段缺陷数量明显多于斜井段,且斜井段的缺陷也主要分布于上平段和斜井段相交的上弯段。
(3)上平段和斜井段裂缝特征存在较大差异。上平段裂缝主要分布在洞顶位置,裂缝多以垂直洞轴线的横线裂缝存在。斜井段裂缝均匀分布在洞周各个位置,走向以斜向裂缝居多。在后期的安全巡检过程中应该主要关注裂缝的扩展情况。