基于非视距环境的信道预测模型
2022-11-01冯燕
冯 燕
(湖南机电职业技术学院信息工程学院,湖南 长沙 410151)
0 引言
接受信号强度(Received Signal Strength Indicator,RSSI)是用无线信号传输的物理特性估算的网络中目标之间的距离,通过构建和距离之间的映射关系推导目标之间的距离,从而实现对网络中的目标对象进行定位和轨迹追踪的功能。但是在室内环境中,由于存在非视距环境,因此会导致出现缺失或严重失真的问题,影响的准确性,无法准确定位和追踪网络中的目标。如何在非视距环境下提高的应用精度是目前的研究热点,研究者提出了很多相应的解决方法。戴天虹等人基于林业环境实地测量,基于对数正态模型进行回归分析。李洪雷等人提出了一种基于室内环境的动态修正的信号模型。AHN H S 等人考虑室内多因素的干扰,提出一种动态缓解RSSI不稳定的方法。已提出的方法大多侧重于利用经典模型直接推算非视距环境的值,未考虑实际环境特性,易出现计算结果和实测数据不一致的情况。
针对非视距环境中缺失或严重失真的问题,该文提出了一种基于马尔科夫链的信道预测模型,该模型基于马尔科夫链重构了信号缺失区域的信道模型,并基于实际的室内环境对提出的信道模型进行性能分析,通过与实测结果进行对比可知,估算的具有与实测相似的分布特性。
1 室内信道模型
在室内环境中,需要借助无线传感网络(Wireless Sensor Network,WSN)节点或机器人对目标位置进行定位和追踪,RSSI 技术是最常采用的方法,当无线信号在室内传播时,信号强度会随着传输距离的增加而逐渐衰减,与距离之间存在一定的映射关系。室内环境与空旷的室外环境不同,其内空间狭窄,房间较多,由于室内存在墙壁、门和家居用品等大型障碍物,因此传输环境比较复杂,当无线信号在其中进行传输时,信号遇到室内的障碍物后会出现反射、折射和衍射等问题,从而导致严重的多径效应问题。网络中的节点和目标会收到从多条路径传输过来的信号值,由于每条传输路径的相位不同,因此信号累加起来会形成一个难以预估的放大或衰减信号。应用于室外空旷环境的自由空间模型无法准确描述室内环境的信号分布特性,由于对数-正态模型采用路径衰减因子动态校准周围环境的变化,因此常被用来描述室内环境的无线信号衰减模型,其表示形式如公式(1)所示。

式中:为当WSN 节点与目标之间距离为时的值,dBm;()为当WSN 节点与目标的距离为参考距离时的值,dBm;为测试环境中WSN 节点与目标的参考距离,=1 m;n为路径衰减因子,它是一个动态变量,根据监测环境的不同而设置为不同的值;X为对数正态遮蔽效应,是一个服从正态分布的高斯随机变量。
公式(1)描述的对数-正态模型通过调整路径衰减因子n和参考距离处的来动态适应不同的室内环境,因此被广泛地应用于各种室内WSN 系统。而且通过提前在监测区域内部署WSN 网络,预设网络中各个静态节点和移动目标的位置,并估算测试区域的路径衰减因子n和参考距离处的,进一步提高该模型的性能。但是在存在信号缺失或信号严重失真的环境中,仅通过调整路径衰减因子n和参考距离处的的数值,直接利用公式(1)描述的信号衰减模型来预估监测区域中信号缺失位置的是不可靠的,它没有考虑该位置存在的大型障碍物或其他干扰物对无线信号的影响,因此,直接用公式(1)作为对应的信号衰减模型来描述信号缺失位置的RSSI 分布特性可能会导致出现较大的误差,进而严重影响WSN 网络的应用。
2 基于马尔科夫链的信道预测模型
考虑一个由个传感节点和个移动机器人组成的室内WSN 网络,室内环境中的部分局部区域空间狭小,存在大型障碍物和移动遮蔽物,导致在网络中存在信号严重失真的区域。网络中的个传感节点被随机部署在监测区域内,其位置已知x=[x,y](=1,2,...,),移动机器人位置未知P=[x,y](=1,2,...,)。网络中随机部署的传感节点每隔0.1 s 周期性地向四周发送包括节点ID 和位置信息的信标报文。
室内区域一般会存在墙壁、门窗和家居等各种障碍物,当无线信号在其中进行传输时,遇到障碍物会出现反射、折射等多径效应问题,信号传输方向的改变、障碍物对能量的吸收等因素会加速RSSI 的衰减,以至于无法准确描述与传输距离之间的映射关系。无线信号在室内环境中的传输特性图如图1 所示。图1(a)描述了无线信号在视距环境下的信号传输特性,在室内的视距环境下,即使障碍物的反射会产生来自不同方向的传输路线,但是发射节点和接收节点之间的直接传输路径占据了主要的地位,利用公式(1),接收节点可以有效地估算对应的值。无线信号在室内非视距环境下的信号传输特性如图1(b)所示,在非视距的环境下,发射节点和接收节点之间没有直接的传输路径,当无线信号在传输过程中遇到墙壁等障碍物时,信号传输方向会发生改变,一部分信号会被障碍物吸收,一部分会通过障碍物的表面发射到接收节点,由于缺失直射信号,因此直接利用公式(1)估算的值会存在严重失真的问题。利用射线跟踪技术可以解决严重失真的问题,但是射线跟踪技术需要提前知道室内区域的几何环境,室内存在复杂的几何环境,不同区域的几何环境可能存在较大的区别,仅采用射线跟踪技术预估的值会带来较大的计算开销。针对这个问题,将马尔科夫链融合到射线跟踪技术中,通过训练离散马尔科夫链,无须考虑室内复杂的几何环境,只需要重点关注无线信号自身的传输特性。
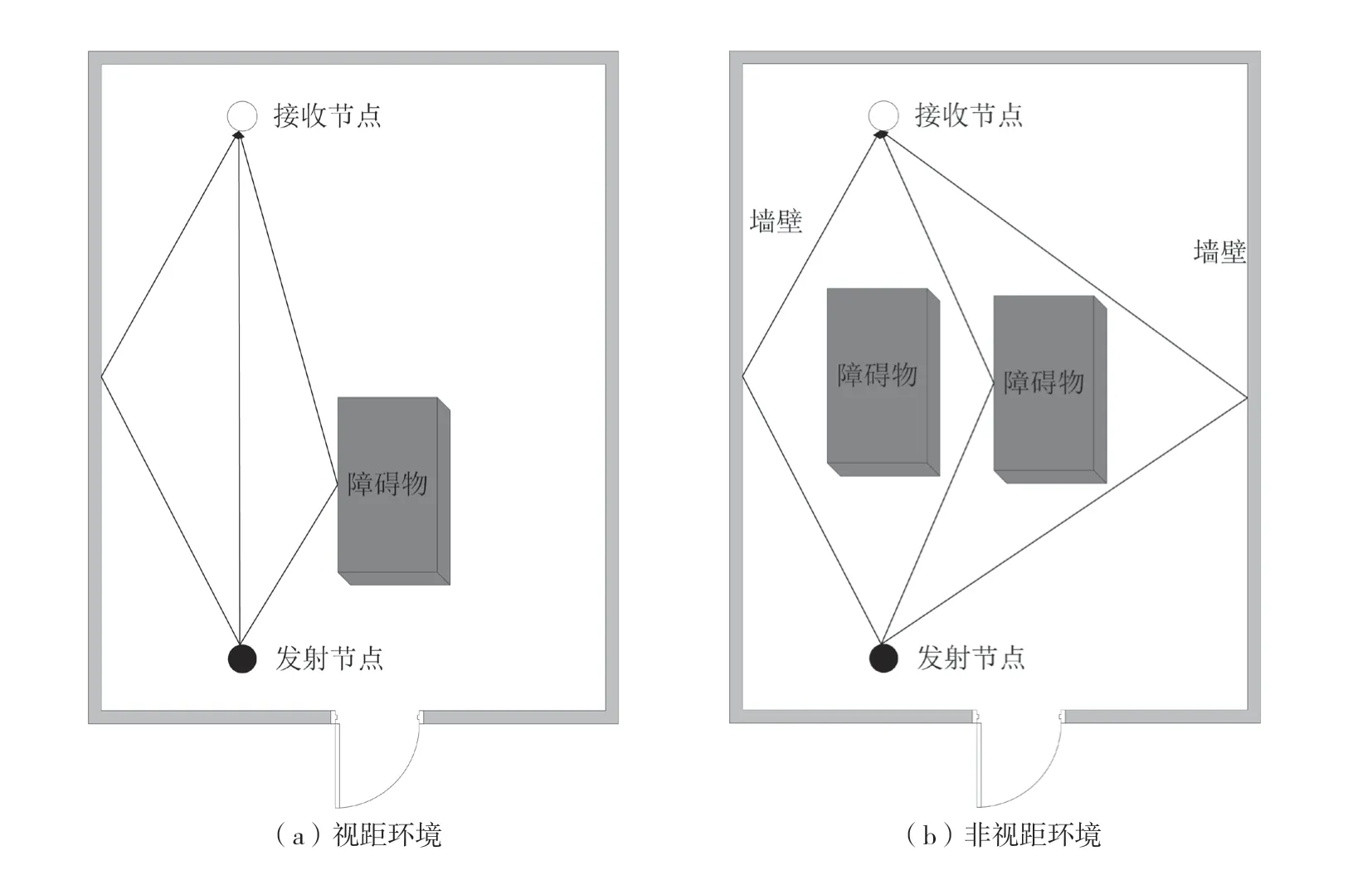
图1 无线信号在室内环境的传输特性
在非视距环境中,由于发射节点和接收节点之间没有直接的传输路径,,当无线信号在空气中传输时,遇到障碍物会发生反射,因此将发射节点发送的信号划分为数量为的传输射线,接收节点将得到一个离散化的辐射模式。当移动机器人在室内监测区域移动时,假设每隔0.1 m 就将读取对应位置的值,当移动机器人在室内视距环境下移动时,将采集到的和相应的距离组合在一起,表示状态序列(,距离),根据距离的远近关系建立状态序列之间的离散关系,并利用采集到的状态序列训练离散马尔科夫链,如公式(2)所示。

式中:RSSI为时刻为时的值,dBm;()为概率分布函数;(,,…,RSSI)为离散马尔科夫链。
当移动机器人移动到非视距区域时,机器人每移动0.1 m的距离,利用训练的离散马尔科夫链可以根据映射关系从当前状态转换到下一个状态。当=41 dBm 时,距离=1.2 m组成当前状态序列(=41,=1.2),增加单位增量0.1 m的离散马尔科夫链状态转移过程如图2 所示,图2 中箭头上的数字表示从当前状态序列跳转到下一个状态序列的概率,从当前状态出发,利用离散马尔科夫链可以得到多个基于单位增量的下一阶段状态序列,每个新的状态序列都有一定概率转换为下一个增量状态,选择概率最大的作为下一增量状态序列。

图2 当前状态(RSSI=41 dBm,距离d=1.2 m)时的状态转移过程
移动机器人在非视距环境中得到的会因多径效应问题而出现较大的偏差,不能直接组合成有效的状态序列(,),甚至在障碍物紧靠传感节点、严重遮蔽发射信号的极端情况下,机器人可能会出现无法采集有效值的情况。在非视距环境中,由于墙壁等障碍物的反射,移动机器人会收到数量为的传输射线,每条射线都由离散马尔科夫链生成的状态序列组成,如果当前状态位于视距环境中,则将距离非视距区域较近的状态序列作为初始状态,移动机器人在非视距环境中接收到的第条射线的如公式(3)所示。

式中:θ为第条射线移动机器人和发射节点之间的入射角度,°;为移动机器人和发射节点之间的距离,m;d为视距环境下概率最大的状态序列的距离值,m;d为视距环境下概率次大的状态序列的距离值,m;RSSI(d)为马尔科夫链中距离为d时的值,dBm。
当当前状态为非视距环境中预估的状态序列时,需要考虑当前状态下入射角度为θ时的离散马尔科夫链状态序列,移动机器人接收到的第条射线的如公式(4)所示。

式中:RSSI(d,θ)中的θ为前一个非视距状态下移动机器人与发射节点之间的发射角度,°。
在非视距环境中,障碍物的存在会导致无线信号出现多条传输射线,当移动机器人和发射节点之间的距离为、接收到的传输射线数量为时,其对应的如公式(5)所示。

当传感节点和移动机器人之间只有一条射线时,=1;当传感节点和移动机器人之间由于障碍物的反射,存在多条传输射线时,>1。
3 性能分析
在一个面积为500 m的办公区域部署WSN 网络,该区域位于一栋办公楼的第四层,该层由14 个大小不一的房间和走廊组成。采用TI 公司的CC2530 片上系统作为传感节点和移动机器人的无线收发装置,为所有传感节点和移动机器人都配置1 根1/4 波长的全向天线,设置2.4 G 频段作为无线信号的载波频率。首先,在整个区域部署传感节点,并确保移动机器人能够在该区域的任何位置都能接收直射信号,每隔0.1 m 采集对应位置的值,每个位置持续接收100 个数据并记录下来。其次,在这2 个房间增加障碍物,使2 个房间的部分区域成为非视距环境,当移动机器人运行到该处时,将无法接收网络中传感节点的直射信号,甚至在障碍物的附近出现了无法接收信号的情况。最后,依然每隔0.1 m 读取该位置的,每个位置持续接收100 个数据,反复进行试验。
尽管天线是全向的,但辐射模式并非完全对称,机器人每向前移动0.1 m,都以90°增量读取20个读数,以进行完整旋转。基于室内视距环境中的实测和对应的距离能够提高该文所提出算法估算的非视距环境下的RSSI 数据。
通过在监测区域合理地部署传感节点来减少大型障碍物的数量,使移动机器人在任何位置都可以接收传感节点发送的直射信号。图3 描述了在该办公区域一个5m×5m 的房间内,移动机器人接收的分布辐射图。由图3 可知,虽然移动机器人能够接收直射信号,但在室内环境中的分布会出现较大的波动,部分距离临近区域的值会出现较大的差异,其原因是在室内房间中空间比较狭窄,墙和门框等障碍物普遍存在,机器人在部分区域接收到的信号受墙壁等障碍物的干扰,从而导致RSSI 出现较大的波动。

图3 实测RSSI 分布
在图3 描述的房间内放置2 个长度为1 m、宽度为0.5 m且高度为2.4 m 的书柜,当机器人在房间进行移动时,由于书柜体积较大,因此机器人在书柜附近会出现无法接收到传感节点直射信号的非视距情况。利用该文所提出地模型预测非视距房间内的分布辐射如图4 所示。由图4 可知,利用提出的马尔科夫链预测模型能够根据视距区域的和距离状态序列估算非视距环境中的和距离状态序列。通过与图3 进行比较可以看出,虽然在房间内放置了2 个较大的障碍物,增加了房间内的非视距范围,但是通过分析预测和实测的分布辐射图可知,采用该文所提出地模型预测的具有与实测相似的分布特性,能够准确地描述室内非视距环境的信号特性。
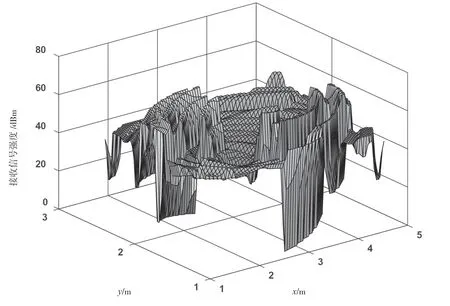
图4 提出模型预测的RSSI 分布
4 结语
在基于WSN 的应用中,节点失效、网络遭受攻击以及室内出现大的障碍物等因素都会导致局部区域出现信号缺失或信号失真的情况,针对这一问题,该文提出了一种基于马尔科夫链的RSSI 信道预测模型,该模型基于正常区域的分布构建状态转移方程,并结合室内多径效应进行预测。试验结果表明,该文所提出的模型预测的具有与实测相似的分布特性。
