基于天棚阻尼的某特种车辆垂向平稳性优化
2022-10-31梁志慷黄志辉赵国栋杨鸿泰秦晓特
梁志慷,黄志辉,赵国栋,杨鸿泰,秦晓特
(1.西南交通大学 牵引动力国家重点实验室,四川 成都 610031;2.太原中车时代轨道工程机械有限公司,山西 太原 030027)
铁道车辆应用被动悬挂系统较多,此时减振器性能在运行过程中固定不变[1],当轨道线路条件、振动状况等发生变化时,车辆振动加剧、动力学性能恶化。而半主动或全主动悬挂系统可利用控制策略实时调节阻尼系数,针对复杂多变的工况进行响应,改善车辆动力学性能。半主动控制比主动控制需要能量少,在控制策略失效的情况下,半主动控制可作为被动控制继续工作,可靠性较高[2-3]。因此,将半主动控制应用于车辆悬挂系统是改善铁道车辆运行品质的发展趋势之一[4]。
目前针对半主动悬挂系统对车辆二系横向减振效果的研究较多[5-8],针对垂向减振器的半主动控制研究较少。现有某特种车辆在优化其悬挂参数后车体垂向平稳性仍不理想,因此本文拟采用一系悬挂半主动控制改善车体垂向平稳性,建立车辆动力学模型进行仿真分析,并对比分析半主动控制与被动控制对车辆运行稳定性和曲线通过性能的影响。
1 车辆模型
利用SIMPACK多体动力学软件建立车辆动力学模型,如图1所示。模型包括1个车体、2个构架、2个齿轮箱、4个轮对、8个轴箱,共计17个刚体。轴箱定位采用双拉杆定位方式,两侧各设置1组圆钢弹簧。车体、构架和轮对考虑伸缩、横移、沉浮、侧滚、点头、摇头6个自由度,齿轮箱和轴箱只考虑点头自由度,整车共计52个自由度,其拓扑图如图2所示。
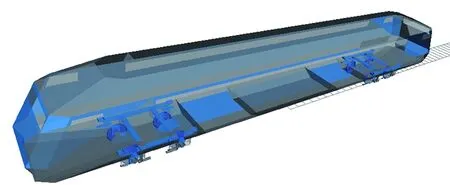
图1 SIMPACK车辆动力学模型

图2 车辆拓扑图
2 仿真模型
2.1 天棚阻尼控制原理
车辆对应的两自由度1/4半主动悬挂系统模型如图3所示,所采用的天棚阻尼控制策略是由美国学者D.Karnopp教授提出的一种半主动隔振方案,应用广泛,可靠性高[9],通过改变减振器的阻尼值改善列车平稳性。按照其调节特性,控制策略分为:开关型天棚阻尼控制策略和连续型天棚阻尼控制策略。
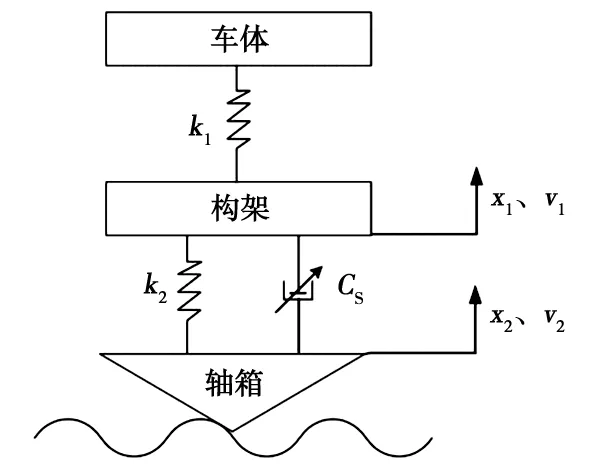
k1.二系悬挂刚度;k2.一系悬挂刚度;x1.构架位移;x2.轴箱位移。
开关型天棚阻尼控制的阻尼系数调节规律和连续型天棚阻尼控制的阻尼系数调节规律分别为式(1)和式(2)。

(1)
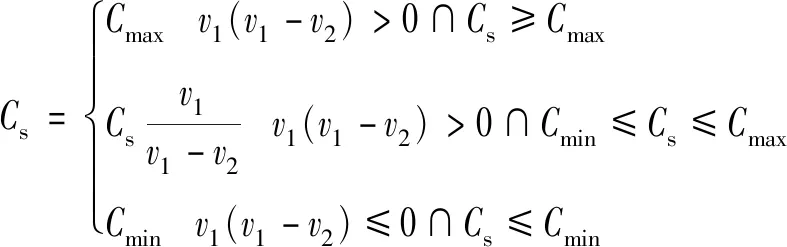
(2)
式中:v1——构架垂向绝对速度,m/s;
v2——轴箱垂向绝对速度,m/s;
Cs——减振器阻尼系数,kN·s/m;
Cmax——最大天棚阻尼系数,kN·s/m;
Cmin——最小天棚阻尼系数,kN·s/m。
可连续调节阻尼系数的减振器设计制造难度大,工程上通常采用易实现的开关型天棚阻尼控制,其控制原理为:垂直方向,当转向架构架相对于轴箱的速度和转向架构架的绝对速度方向相同时,减振器提供的阻尼力与构架运行方向相反,此时天棚阻尼系数取最大值以抑制构架垂向振动;当转向架构架相对于轴箱的速度和构架的绝对速度方向相反时,减振器提供的阻尼力与构架运行方向相同,此时减振器提供的阻尼力会导致构架振动加剧,故天棚阻尼系数应取最小值以减小提供给构架的阻尼力,尽可能避免构架振动的加剧。
2.2 Simulink仿真模型
选用开关型天棚阻尼控制策略,根据式(1)在MATLAB/Simulink中搭建车辆一系垂向减振器的半主动控制模型,如图4所示。其中,输入模块1、2分别对应一系垂向减振器两端绝对速度,常量模块1、2分别对应最大、最小天棚阻尼系数,输出模块对应一系垂向减振器所输出的阻尼力。

图4 半主动控制Simulink模型
2.3 半主动控制仿真模型
仿真分析前需在SIMAPCK中定义一系垂向减振器的阻尼力和两端绝对速度,并分别作为输入和输出变量,然后在MATLAB中调用Simulink自带的SIMAT接口与车辆动力学模型实现数据交互,最终建立仿真分析模型,如图5所示。图5中,左侧接口1~8与一系垂向减振器阻尼力相连,接收输入变量;右侧接口1~16中,奇数号接口输出减振器与轴箱相连端的绝对速度。
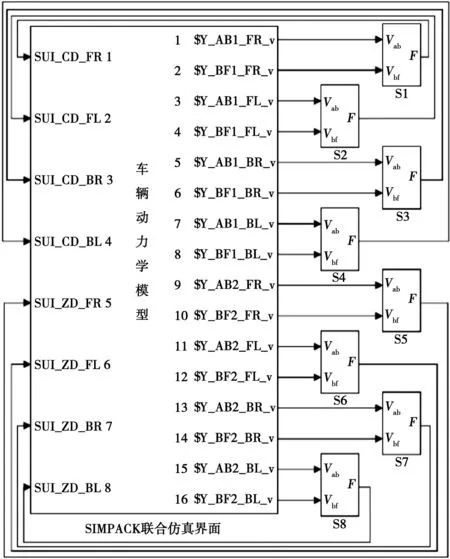
S1~S8.一系垂向减振器半主动控制Simulink模型;Vab.轴箱端减振器绝对速度;Vbf.构架端减振器绝对速度;F.理想的阻尼力。
3 天棚阻尼系数的选取
采用开关型天棚阻尼控制策略需确定最大天棚阻尼系数Cmax与最小天棚阻尼系数Cmin。在实际工作中减振器作用不可能完全消失,故Cmin不为0,根据减振器实际阻尼特性数据,取Cmin=3 kN·s/m[10]。
在正常悬挂参数范围内,一般取数值小的悬挂刚度有利于改善平稳性,但阻尼有最优范围,且其数值与列车速度、轨道条件、刚度等有关[11]。对于Cmax的取值,可选取车辆以120 km/h的速度直线运行工况,在Cmax在10~150 kN·s/m范围内对车体垂向平稳性指标进行仿真分析,依据车体垂向平稳性指标确定Cmax的值。
图6给出了车体垂向平稳性指标随Cmax的变化趋势。从图6可以看出,Cmax在10~100 kN·s/m范围内,车体垂向平稳性指标随着Cmax的增大逐渐改善;Cmax在100~140 kN·s/m范围内,车体垂向平稳性指标变化趋势较缓;当Cmax=150 kN·s/m时,车体垂向平稳性迅速恶化,这是因为轨道激励传递给一系悬挂的高频振动成分较多,阻尼的增大使高频振动传递率增大,导致车体平稳性恶化[12]。图7给出了Cmax=140 kN·s/m和Cmax=150 kN·s/m时车体垂向振动加速度功率谱密度曲线。从图7可以看出,当Cmax=150 kN·s/m时,90~100 Hz高频区振动明显增多且远超过低频振动,从而导致车体垂向平稳性迅速恶化,这与理论判断结果相符。所以,一系垂向阻尼不宜选择太大,Cmax的选择范围在100~140 kN·s/m为宜,基于工程化考虑,Cmax取值100 kN·s/m。

图6 车体垂向平稳性指标随Cmax的变化曲线

图7 车体垂向振动加速度功率谱密度对比图
4 动力学性能对比分析
4.1 运行平稳性
在直线运行工况下,对车辆以不同速度通过美国五级谱激扰的轨道时半主动控制与被动控制对车体横向和垂向平稳性的影响进行对比分析。图8为70~130 km/h速度范围内半主动控制与被动控制车体横向和垂向平稳性指标随列车运行速度变化情况。
由图8(a)可知,随着车辆运行速度提高,车体横向平稳性逐渐恶化,但列车运行速度超过110 km/h后,车体的横向平稳性有所改善;在70~90 km/h速度范围内,半主动控制与被动控制下的车体横向平稳性相近,当速度超过90 km/h后,半主动控制对车体的横向平稳性改善越来越明显,速度为110 km/h时,改善效果最好,车体横向平稳性改善幅度为5%。由图8(b)可知,随着列车运行速度提高,车体垂向平稳性一直恶化,同时半主动控制对车体垂向平稳性的改善效果明显,在速度110 km/h时改善效果最好,车体垂向平稳性改善幅度为12%,根据GB/T 17426—1998《铁道特种车辆和轨行机械动力学性能评定及试验方法》规定,车辆平稳性指标低于3时的平稳性等级为优级[13],可见,90 km/h运行速度内被动控制时车体垂向平稳性为优级,120 km/h运行速度(设计时速)内半主动控制时车体垂向平稳性为优级。

图8 半主动控制与被动控制车体横向和垂向平稳性指标变化曲线
可见,随着列车运行速度的提高,半主动控制对车体平稳性的改善越来越明显,车体横向和垂向平稳性指标均在运行速度为110 km/h时改善效果最好,由于半主动控制策略主要作用于垂向,垂向平稳性改善幅度较大。
4.2 加速度功率谱密度
由于开关型天棚阻尼半主动控制对该车辆的垂向平稳性改善幅度较大,且平稳性指标是以振动加速度计算得到,故可利用加速度功率谱密度判断半主动控制策略优化的车体垂向振动具体频率范围。
图 9为被动控制和半主动控制车体垂向振动加速度功率谱密度曲线。由图9可知,半主动控制可有效抑制车体中低频范围(0~5 Hz)内的振动,但在高频范围(大于5 Hz)内,半主动控制会导致车体高频振动成分有所增加,这是由于控制策略的天棚阻尼系数在最大值与最小值之间频繁切换导致的。可以看出,开关型天棚阻尼半主动控制针对中低频振动有较好的减振效果,若要实现整个频率范围内振动的降低,仍需进一步研究。
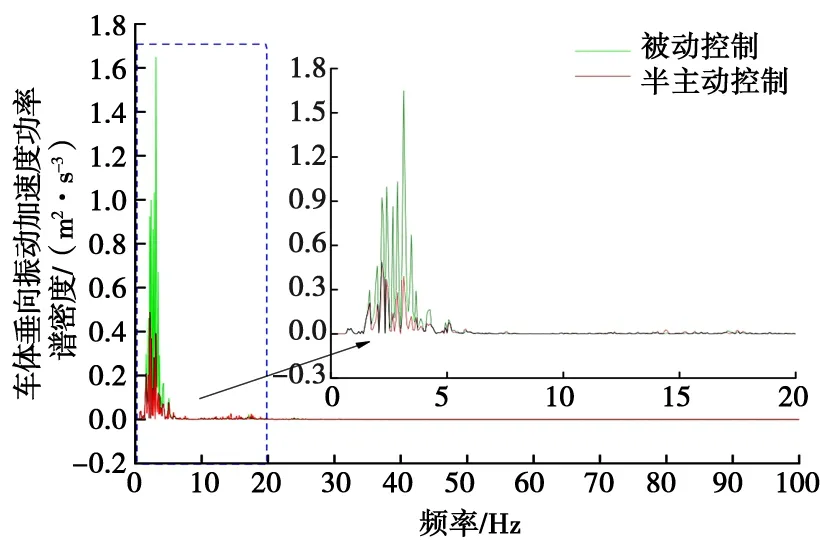
图9 车体垂向振动加速度功率谱密度曲线
4.3 运行稳定性
以非线性临界速度作为车辆运行稳定性的评判标准,分别计算被动控制和半主动控制作用下车辆的非线性临界速度。计算结果显示:被动控制下车辆的非线性临界速度为452 km/h,半主动控制下车辆的非线性临界速度为395 km/h,降低了13%。被动控制和半主动控制作用下车辆的轮对横移量时程曲线如图10所示。

图10 被动控制和半主动控制下轮对横移量时程曲线
4.4 曲线通过性能
车辆的曲线通过性能分别按脱轨系数、轮重减载率、横向力允许限度等指标评定[13]。GB/T 17426—1998规定,脱轨系数第一限值为1.0,轮重减载率第一限值为0.6,车辆轴重为17.5 t,根据这些参数计算得到轮轴横向力限值为87 kN。
按照曲线半径为800 m、轨道激励为美国五级轨道谱计算,被动控制和半主动控制作用下,车辆在70~130 km/h速度范围内的曲线通过性能指标的仿真结果如图11所示。

图11 被动控制和半主动控制作用下曲线通过性能指标仿真结果
从图11(a)和图11(b)可以看出,在70~110 km/h速度范围内,半主动控制对车辆的脱轨系数与轮轴横向力的作用效果与被动控制相近;当速度超过110 km/h后,半主动控制对脱轨系数与轮轴横向力有所改善。由图11(c)可知,随车辆运行速度提高轮重减载率先减小后增大,半主动控制会导致车辆轮重减载率恶化,车速130 km/h时轮重减载率0.57,未超出安全限值0.6。
5 结论
(1) 随着开关型天棚控制Cmax增大,车体垂向平稳性先改善后恶化,基于工程化考虑Cmax选取100 kN·s/m。
(2) 开关型天棚垂向半主动控制策略可提升车辆垂向平稳性12%,同时对车辆横向平稳性、脱轨系数和轮轴横向力影响较小。
(3) 采用开关型天棚控制,车辆非线性临界速度有所降低,虽轮重减载率增加,但未超出安全限值,仍满足运行安全要求。
(4) 开关型天棚阻尼控制策略可在车辆上实现工程化应用。
