多端口电力电子变压器的安全稳定运行区域分析与控制
2022-10-31李骏驰吴俊勇郝亮亮
李骏驰,吴俊勇,熊 飞,郝亮亮
(1. 北京交通大学电气工程学院,北京市 100044;2. 重庆邮电大学自动化学院,重庆市 400065)
0 引言
随着配电网中光伏、储能等分布式发电(distributed generation,DG)和电动汽车等直流负荷接入量的不断增加,交流配电网已经很难满足供电可靠性、电能质量和潮流双向流动的要求[1]。然而,交流配电网不可能完全被直流配电网取代,未来配电系统将发展为交直流混合配电网[1-2]。通过电力电子变压器(power electronic transformer,PET)对交直流混合配电网进行组网,对交流配电网改造程度小,不会对供电可靠性和稳定性产生负面影响,有利于DG 和直流负荷的接入[3-6]。
现有PET 大多通过DC/DC 变换器低压侧全部并联的方式构造直流端口,直流端口数量少且电压等级单一,DG 和直流负荷只能接入同一直流端口,适应性不足[7-10]。因此,多端口PET 成为交直流混合配电网组网的关键设备。文献[11-12]通过多绕组中、高频变压器构造多端口PET,但大功率、多绕组的中、高频变压器设计制造困难,成本较高。文献[13]提出一种四端口PET,构造了±750 V和±375 V 两种直流端口,但是需要在双有源桥(dual active bridge,DAB)变换器输出端增添额外的DC/DC 变换器。文献[14]提出一种共高频母线的四端口PET,端口之间相互隔离,功率变换级少,但是需要增加不控整流和阻尼电阻来抑制母线的高频振荡[15]。文献[16]提出一种交直流混合微电网,通过每3 个DAB 变换器输出端并联共构造了4 个直流子网接口。基于文献[16]构造多端口PET 可以解决上述问题:系统采用模块化设计,降低了设计制造困难;不存在高频母线,没有高频振荡问题;系统不需要增添额外的DC/DC 变换器;直流端口数量多,DG 和直流负荷可以接入不同直流端口,避免相互影响;高频变压器提供电气隔离,对DG 和关键直流负荷起到保护作用。
然而,当多端口负荷功率差异较大时,基于文献[16]构造的多端口PET 将引起PET 相间或相内功率严重不平衡从而超出PET 的功率传输能力,导致系统不稳定。文献[16]只分析了所提交直流混合微电网的固有稳定运行区域,未提出安全稳定裕度的提升方法。文献[17-18]针对静止同步补偿器(static synchronous compensator,STATCOM)补偿不平衡负荷的工况,分析了负序电流注入的精确补偿区域。文献[19]针对新能源经柔性直流孤岛送出场景,绘制了送端换流站安全稳定运行区域,并通过配置耗能电阻来增大安全稳定运行区域。文献[20]研究了模块化多电平换流器(modular multilevel converter,MMC)在电网相位发生扰动情况下的运行区域,提出采用调整桥臂电阻、电感参数的方法来扩大运行区域。文献[21]研究了电网电压不平衡情况下MMC 的收缩运行区域,提出了边界控制方法。文献[22-23]提出了配电网安全域的概念,并确定了其严格与非严格安全边界。当前,鲜有文献对级联式多端口PET 安全稳定运行区域进行理论分析与研究,更未有文献提出提升级联式多端口PET 安全稳定运行裕度的控制方法。多端口PET 作为交直流混合配电网的组网设备,容纳大量DG 和关键直流负荷,其安全稳定运行至关重要,对多端口PET 安全稳定运行区域以及提升安全稳定运行裕度方法的研究具有重要意义。
首先,本文基于文献[16]构造了一种级联式跨相并联型多端口PET(cascaded inter-phase parallel connected multi-port PET,CIPCM PET),从拓扑上改善了多端口负荷功率差异较大时的系统稳定性问题;接着,推导得到多端口PET 安全稳定运行区域及边界的解析表达式,进一步给出其安全稳定运行裕度的定义和计算方法;然后,提出以提升系统安全稳定运行裕度为目标的功率转移策略(power transfer strategy,PTS);最 后,在 MATLAB/Simulink 中搭建CIPCM PET 的仿真模型,仿真结果验证了本文所提安全稳定运行区域分析方法及PTS 的正确性和有效性。
1 CIPCM PET 拓扑
CIPCM PET 拓扑如图1 所示。图中:usa、usb、usc分别为a、b、c 相电网电压;ua、ub、uc和ia、ib、ic分别为PET 交流侧a、b、c 相电压和电流;La、Lb、Lc分别为a、b、c 相滤波电感,一般情况下取La=Lb=Lc=L,其中L为电感;C1,ki和C2,ki分别为DAB 变换器原、副边 的 直 流 侧 电 容;Vdc1,ki和Vdc2,ki分 别 为DAB 变 换 器原、副边的直流侧电压;VH,ki为H 桥变换器交流侧电 压;Vp,ki和Vs,ki分 别 为DAB 变 换 器 原、副 边 的 交流 侧 电 压;ip,ki和is,ki分 别 为DAB 变 换 器 原、副 边 交流侧电流;id,ki为DAB 变换器副边直流侧输出电流;iload,ki为DAB 变 换 器 直 流 侧 负 载 电 流;Tki为 高 频 变压器;Ls,ki为高频变压器漏感;k表示三相中任一相,k=a,b,c;i表 示 任 一 相 内 各 变 换 器 的 编 号,i=1,2,…,N,其中N为每相级联H 桥的数量,本文取N=4。
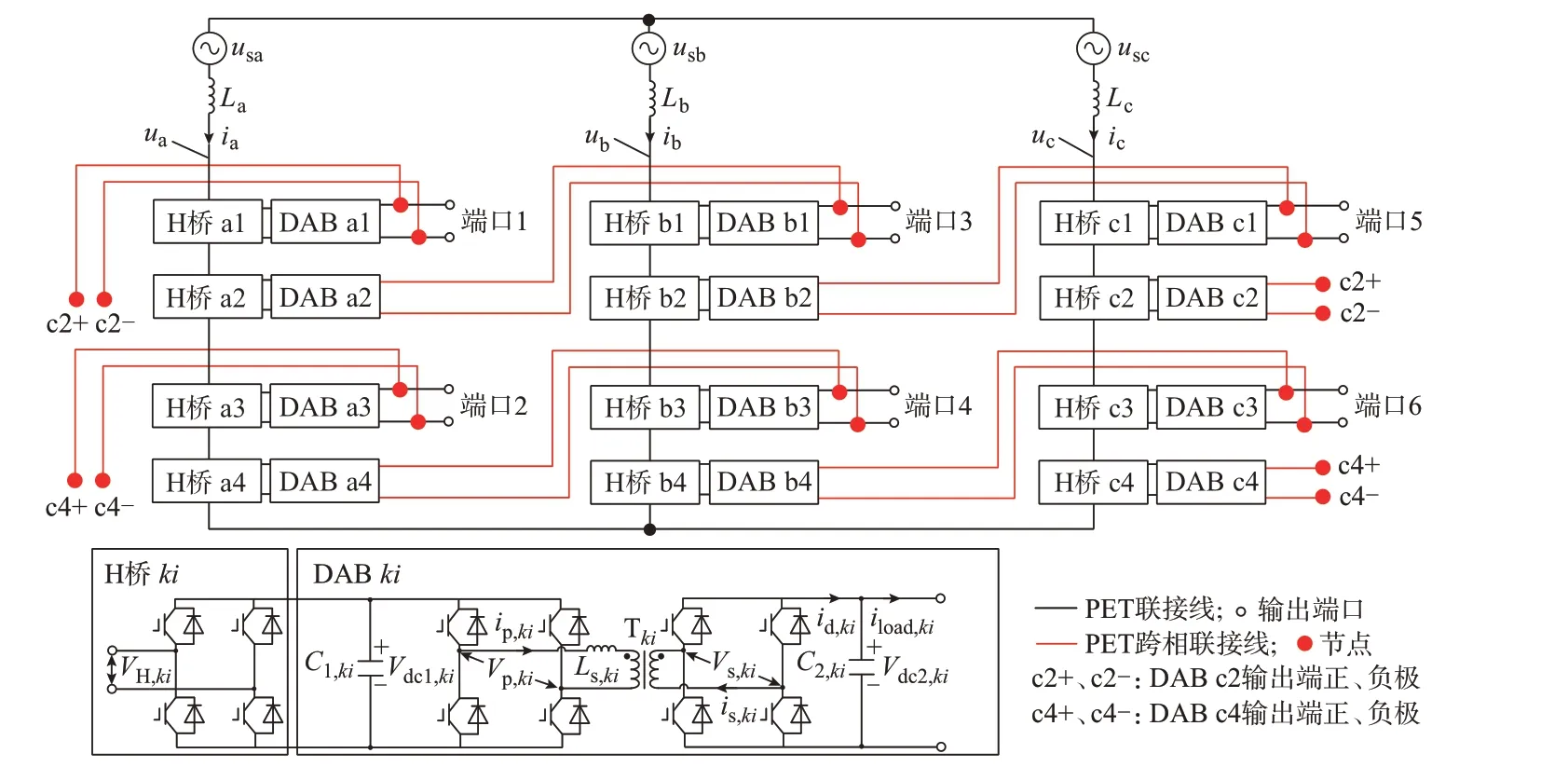
图1 CIPCM PET 拓扑Fig.1 Topology of CIPCM PET
CIPCM PET 前端通过级联H 桥变换器直接接入交流电网,每个H 桥变换器直流侧连接一个DAB变换器,利用DAB 变换器输出端并联形式构造多个直流端口。整个系统采用模块化设计,高频变压器变比均为1∶1,DAB 变换器原、副边直流侧电压相等,即Vdc1,ki=Vdc2,ki=Vdc,其 中Vdc为 直 流 电 压。直流端口1 至6 均通过输出端跨相并联的2 个DAB来构造,例如端口1 通过DAB a1 和DAB c2 输出端并联来构造。通过DAB 变换器跨相联接线进行功率的转移,可以降低PET 相间、相内功率不平衡程度,提升其安全稳定运行裕度。其中,PET 每相H桥变换器的级联数量、构造直流端口的数量以及直流端口的电压等级可以根据三相电网电压、直流负荷需求等实际情况进行相应调整。
2 CIPCM PET 安全稳定运行区域
CIPCM PET 具有多个直流端口,当各直流端口负荷差异过大时,会造成PET 相间功率高度不平衡和相内功率高度不平衡。当相间功率不平衡程度过高时,注入的零序电压过大会使得PET 交流侧相电压幅值超过本相H 桥直流电压总和,出现过调制。当相内功率不平衡程度过高时,会使得本相内某一个或几个H 桥的交流侧输出电压过高甚至超过H 桥的直流侧电压,同样会出现过调制。因此,PET 相间功率不平衡程度过高或相内功率不平衡程度过高都会引起过调制,进而影响系统的安全稳定运行。
基于载波移相(carrier phase shift,CPS)的脉宽调制(pulse width modulation,PWM)是级联H 桥变换器常用的调制策略[24]。由于CPS PWM 最大调制比为1,本章以调制比为1 作为约束条件,推导得到PET 安全稳定运行区域及其边界的解析表达式。
2.1 相间安全稳定运行区域
PET 交流侧相电压和相电流可以表示为:

式中:Up和Ip分别为PET 交流侧相电压和相电流正序分量的幅值;U0和θ0分别为零序电压分量的幅值和相角;φp为功率因数角;ω为电网电压角频率。
由于PET 主要处理有功功率,与电网交换的无功功率很小,可以认为φp=0,则由式(1)和式(2)可以计算得到PET 的a、b、c 相功率Pa、Pb、Pc分别为:

联立式(3)和式(4)可以得到零序电压的幅值和相角的正余弦表达式为:

根据三角函数的诱导公式,对于任意数A、B和角α、β,Asinα+Bsinβ的幅值Vamp为:

PET 的a、b、c 相功率的标幺值可以分别表示为Papu=Pa/Ptotal、Pbpu=Pb/Ptotal、Pcpu=Pc/Ptotal。根 据式(4)可以得到:

即Pcpu可以通过Papu和Pbpu来表示。那么,利用Papu和Pbpu就可以表征PET 相间功率不平衡程度以及PET 工作点。
PET 每相电压的调制比计算方法为该相相电压峰值除以本相所有H 桥直流电压之和。采用3.1节所述控制策略,所有H 桥直流电压参考值相同。稳态情况下,H 桥直流电压实际值跟踪参考值,此时各H 桥直流电压相等且均为Vdc。因此,当一相内包含N个H 桥时,一相内所有H 桥直流之和为NVdc。a、b、c 相电压的调制比可以分别表示为ma=uam/(NVdc)、mb=ubm/(NVdc)、mc=ucm/(NVdc)。根据式(8)可以得到:

记mmax=max {ma,mb,mc},则CPS-PWM 最大调制比为1 的约束条件可以转化为:

绘 制mmax=1 关 于(Papu,Pbpu)的 曲 线 如 图2 所示。PET 相间安全稳定运行区域即为图2 中蓝色区域(mmax<1),相间安全稳定运行边界即为图2 中红色曲线组成的边界(mmax=1)。
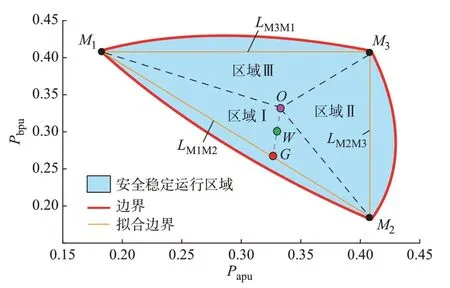
图2 PET 相间安全稳定运行区域Fig.2 Inter-phase safe and stable operation region of PET

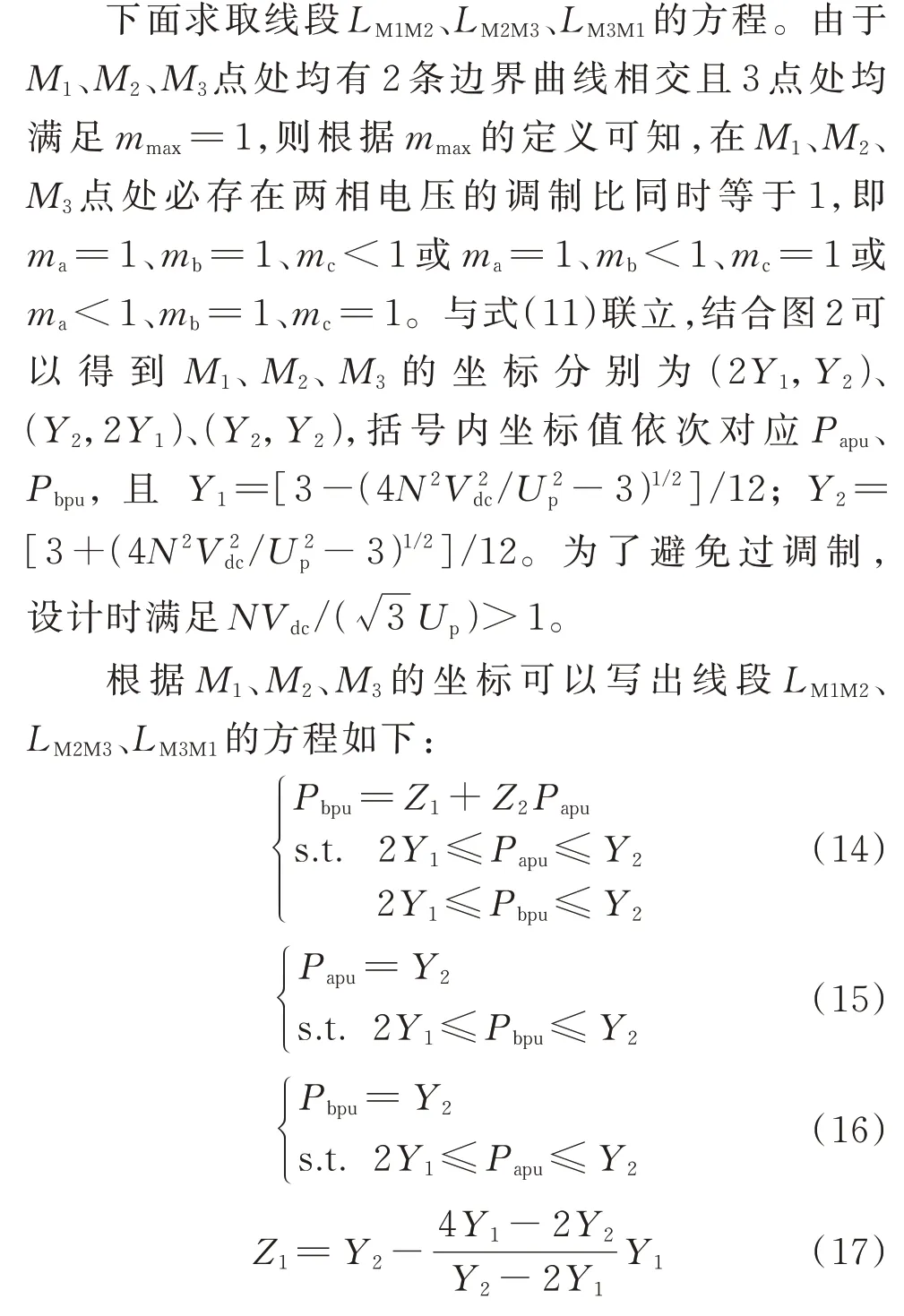

式(14)至式(16)即为PET 相间安全稳定运行区域边界的解析表达式。
2.2 相内安全稳定运行区域
本节首先说明建立相内安全稳定运行区域的必要性。由于某一端口负荷的增大,PET 工作点仍处于相间安全稳定运行区域内,但相内某H 桥可能已经产生过调制。因此,必须通过相内安全稳定运行区域和相间安全稳定运行区域的联合限制,才能保证PET 安全稳定运行。
由于PET 三相拓扑结构相同,下面以a 相为例进行相内安全稳定运行区域分析。a 相内第i个H桥的传输功率Pai可以表示为:

式中:mai为a 相内第i个H 桥的调制比。
由式(19)可知,当Vdc与Ip确定时,mai与Pai具有线性关系,因此,可以通过mai来表征a 相内第i个H 桥的工作点。
在相内安全稳定运行区域内各H 桥均满足调制比小于1。因此,相内安全稳定运行区域Ωa可以表示为:

式 中:ma=[ma1,ma2,…,mai,…,maN]T为 用 调 制 比表征的a 相内所有H 桥当前采样时刻工作点的集合。
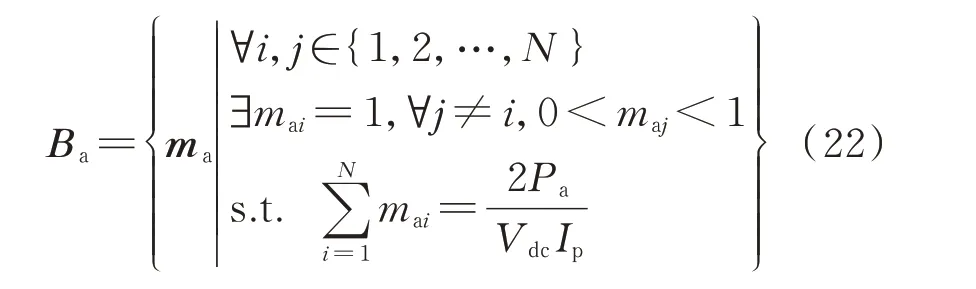
当相内各H 桥中任意一个H 桥的调制比等于1时,所有H 桥工作点的集合Ba即为相内安全稳定运行区域边界,可以表示为:
2.3 安全稳定运行裕度
本节提出PET 相间安全稳定运行裕度(简称“相间裕度”)及相内安全稳定运行裕度(简称“相内裕度”)的计算方法。计算相间裕度首先要以PET当前采样时刻工作点(简称“当前工作点”)指向平衡工作点的方向作为工作点调节方向(简称“调节方向”);然后,以反调节方向做延长线,确定其与安全稳定运行区域边界的交点(简称“边界工作点”),并以平衡工作点至边界工作点功率变化量的绝对值作为此时相间安全稳定裕度的基值;最后,用当前工作点至边界工作点功率变化量的绝对值除以基值即为当前采样时刻的相间裕度。计算相内裕度首先要寻找当前采样时刻本相中调制比最大的H 桥,然后以1 作为基值,则1 与该H 桥调制比的差值除以基值即为当前采样时刻的相内裕度。
2.3.1 相间裕度

式中:(PapuO,PbpuO)为O点坐标;(PapuW,PbpuW)为W点坐标;(PapuG,PbpuG)为G点坐标。易知,O点横坐标与纵坐标值相等,记PapuO=PbpuO=PB,其中,PB为三相输入功率平均值。
采用上述方法定义相间裕度的物理意义在于O点是平衡工作点,PET 运行于O点为最佳工作状态。当采用第3 章所述PTS 提升相间裕度时,希望当前工作点延调节方向朝平衡工作点移动,则相间裕度的定义即延调节方向来定义。

由式(23)可知,只需求得O点、W点、G点的坐标即可计算得到相间裕度。O点与W点坐标通过端口电压、电流的采集和功率计算易于求得。求G点坐标先要确定直线OW与LM1M2、LM2M3、LM3M1这3 条边界中的哪一条相交。以O点为中心,O点与M1、M2、M3的连线可以将图2 中三角形分为区域Ⅰ、Ⅱ、Ⅲ。则当W点位于区域Ⅰ时,OW必与LM1M2相交;当W点位于 区域Ⅱ时,OW必与LM2M3相交;当W点位于区域Ⅲ时,OW必与LM3M1相交;当W点位于OM1或OM2或OM3上 时,G点 相 应 为M1或M2或M3。
根据O点和W点坐标可以求得直线OW的方程为:

式中:sign(·)为求解向量叉乘方向的函数。
此时,G点位于LM2M3上,联立式(15)和式(24)可以求得G点坐标为(Y2,Z3Y2+Z4)。
3)当W点位于区域Ⅲ时,也必位于△OM3M1内,必满足:
此时,G点位于LM3M1上,联立式(16)和式(24)可以求得G点坐标为((Y2-Z4)/Z3,Y2)。
4)当W点位于OM1上时,必满足:
此时,G点即为M1点,坐标为(2Y1,Y2)。
5)当W点位于OM2上时,必满足:

此时,G点即为M3点,坐标为(Y2,Y2)。
根据W点所处位置,分别联立式(23)和各G点坐标即可求出相间裕度。
2.3.2 相内裕度
同样,以a 相为例进行相内裕度分析。如2.2 节所述,H 桥a1 至H 桥aN的工作点由其调制比集合表征。
首先,根据H 桥a1 至H 桥aN当前采样时刻的调制比确定调制比最大的H 桥;然后,将1 与该H 桥调制比的差值除以基值1 作为该相相内裕度。
a 相内各H 桥的当前工作点如式(33)所示。

式 中:mb,max和mc,max分 别 为b 相 和c 相 调 制 比 最 大 的H 桥工作点。
以三相相内裕度的最小值作为PET 的相内裕度MSSOR2,即

3 CIPCM PET 控制策略
3.1 级联H 桥控制策略
CIPCM PET 前端级联H 桥的整体控制策略如附录A 图A1 所示,通过电压外环稳定H 桥全局直流电压,通过电流内环调节注入电网的有功和无功电流。其中,PET 无功电流参考值设定为0。级联H 桥相间直流电压平衡通过零序电压注入的方法实现,利用比例-积分调节器分别调节各相H 桥直流侧电压平均值与三相H 桥直流侧电压平均值的偏差,得到由零序电压产生的三相有功功率,进一步计算出零序电压[24]。级联H 桥相内直流电压平衡通过调节各H 桥的交流侧电压的方法实现,利用比例调节器分别调节相内各H 桥直流侧电压与本相H 桥直流侧电压平均值的偏差,将其方向取为与本相电流方向一致,分别叠加到各H 桥交流侧电压上[25]。最后,通过CPS 调制方式生成PWM 波。
3.2 DAB 功率转移策略
根据第2 章的分析,零序电压注入和调节相内H 桥交流侧电压的方法只能在一定范围内解决相间、相内功率不平衡的问题。为提升CIPCM PET安全稳定运行裕度,本节提出PTS,执行过程如图3所示。通过DAB 移相角的调节,利用跨相联接线实现同一端口的2 个DAB 间的功率转移,从而降低PET 相间或相内功率不平衡程度,增大相间或相内裕度。功率转移过程中,当DAB 功率发生变化时,其前端相连的H 桥功率也相应发生变化。

图3 PTS 流程图Fig.3 Flow chart of PTS
PTS 的基本思想为:首先,采集计算CIPCM PET 当前功率和H 桥调制比;然后,对H 桥调制比排序,调制比最大的H 桥给定代号H 桥1,调制比记为m1,与其属于同一端口的H 桥给定代号H 桥1',调制比记为m'1,此时相内裕度MSSOR1=1-m1;最后,比较CIPCM PET 相间裕度与相内裕度的大小。若MSSOR2<MSSOR1,则 进 入 分 支1;若MSSOR2<MSSOR1,则进入分支2。
分 支1:若|m1-m'1|>ε,说 明H 桥1 和H 桥1'调制比不相等,则H 桥1 和H 桥1'功率不相等。其中,ε为容许误差,设为0.02。DAB1(与H 桥1 相连)功率转移指令为-ΔPSSOR1,DAB1'(与H 桥1'相连)功率转移指令为+ΔPSSOR1,其中ΔPSSOR1为单位控制周期功率相内转移指令,可以根据DAB 开关频率和控制周期来设定。DAB1 的功率减小,H 桥1 的功率相应减小,调制比m1也相应减小,相内裕度MSSOR1增大。若|m1-m'1|>ε条件不满足,说明H 桥1 和H桥1'功率基本相等,进行任何功率转移都会造成m1或m'1增大,无法提升相内裕度。当DAB 开关频率较高、控制周期较短时,ΔPSSOR1不能太大,否则会造成计算得到的DAB 移相角的参考值变化太大,短时间内进行大功率的转移会对系统带来很大的扰动,可能会造成系统不稳定;然而,ΔPSSOR1太小可能会超过控制系统对DAB 移相角的计算精度,导致系统无法进行精细的控制。当DAB 开关频率较低、控制周期较长时,ΔPSSOR1可以相对大一些。如附录B 表B1 所示,本文在仿真时将ΔPSSOR1设为100 W。
分支2:若mj<0.95且m'j<0.95,说明H 桥j和H 桥j'具有一定的功率转移能力,能够作为功率转移H 桥。同时,每个控制周期分配给2 个H 桥单元的功率转移指令很小,不会造成H 桥j和H 桥j'在一个控制周期内发生过调制。若mj<0.95且m'j<0.95 条件不满 足,说 明H 桥j和H 桥j'功率均已很大,进行任何功率转移都可能会造成H 桥j和H 桥j'产生过调制,不能作为功率转移H 桥。
PTS 的具体执行步骤如下。
步骤1:采集计算。对a、b、c 相当前功率PapuW、PbpuW、PcpuW和H 桥调制比ma1至ma4、mb1至mb4、mc1至mc4采集计算。
步骤2:排序分组。如附录A 图A2 所示,将a1至a4、b1至b4、c1至c4 称为H 桥的字母编号。用序号①~⑫将H 桥a1至a4、b1至b4、c1至c4 依次重新编号,称为固有编号。固有编号与H 桥字母编号一一对应,始终不变。H 桥固有编号与调制比分别存储于数组第2 列和第3 列中。排序前后,同一H 桥的固有编号与其调制比在数组中始终处于同一行。通过冒泡算法对H 桥调制比进行排序,依照降序重新将H 桥固有编号和调制比存储于数组中。第1 列顺序编号位置始终不变,用于标记大小顺序。隶属于同一端口的2 个H 桥的调制比用mj和m'j表示,分为一组,表示为(mj,m'j),其中,mj≥m'j,j=1,2,…,6,且m1≥m2≥…≥m6。每次排序分组后,可以根据H 桥代号查询到对应的H 桥固有编号和字母编号。
步骤3:计算相间裕度MSSOR1与相内裕度MSSOR2。由步骤1 中采集计算得到的PapuW、PbpuW、PcpuW通过联立式(23)与各G点坐标可以得到相间裕度,相内裕度为MSSOR1=1-m1。
步骤4:MSSOR2<MSSOR1条件判断。若条件满足,则跳到步骤5;若条件不满足,则跳到步骤7。
步骤5:|m1-m'1|>ε条件判断。若条件满足,则跳到步骤6;若条件不满足,则跳到步骤7。
步骤6:功率转移指令设定。DAB1(与H 桥1相连)功率转移指令为-ΔPSSOR1,DAB1'(与H 桥1'相连)功率转移指令为+ΔPSSOR1,其余DAB 不进行功率转移,功率转移指令为0,维持上一控制周期的功率传输。执行完毕后跳到步骤13。
步骤7:可功率转移H 桥搜索初始化。设j=1,从H 桥1 与H 桥1'开 始 搜 索。
步骤8:mj<0.95且m'j<0.95 条件判断。若条件满足,则跳到步骤9;若条件不满足,则跳到步骤10。
步骤9:查询H 桥j和H 桥j'的固有编号并存储。
步骤10:j=j+1,H 桥代号累加。
步骤11:j>6 条件判断H 桥是否全部搜索完毕。若条件满足,则跳到步骤12;若条件不满足,则跳到步骤8。
步骤12:功率相间转移指令计算。如附录A 图A3 所示,计算当前工作点调节至平衡工作点时,a、b、c 相分别应调节的总功率(简称“总调节功率”)ΔPa、ΔPb、ΔPc。进一步,计算总调节功率的比例系数fk如式(39)所示。

将ΔPa、ΔPb、ΔPc按照比例系数分配至每个控制周期,a、b、c 相调节的功率(简称“相周期调节功率”)分 别 为faΔPSSOR2、fbΔPSSOR2、fcΔPSSOR2。其 中,ΔPSSOR2为单位控制周期功率相间转移指令,可以根据DAB 开关频率和控制周期来设定。将相周期调节功率平均分配至相内可功率转移的H 桥上,称为H 桥周期调节功率;将相周期调节功率平均分配至相内不可功率转移的H 桥上,则H 桥周期调节功率为0,得到ΔP1,ΔP2,…,ΔP6。
步骤13:DAB 移相角计算输出。如附录A 图A4 所示,将端口电压外环输出的端口功率指令Pref,Portj与功率分配指令叠加,利用式(40)计算出隶属于同一端口的2 个DAB 的移相比:

式中:fs为DAB 开关频率;Dφ为DAB 移相比。
4 仿真验证
本文构造了一种典型的三相不平衡负载工况,6 个直流端口接入电阻负载,端口额定电压均为750 V,负载工况如附录B 表B2 所示,其中端口6 负载最大。通过MATLAB/Simulink 搭建2 种PET 模型:1)本文构造的CIPCM PET,如图1 所示;2)非跨相多端口PET(non inter-phase connected multi-port PET,NICM PET),如附录A 图A5 所示。仿真参数均如附录B 表B1 所示。通过仿真对比2 种结构的PET 在表B2 负载工况下的工作特性,验证所提PTS 的有效性,仿真结果如附录A 图A6 至图A12所示。
0.5~1.0 s 时,DAB 采用传统功率均衡控制策略[26],各端口负载差异较大,造成PET 相间功率不平衡程度很大。由于三相功率不平衡度过高,NICM PET 相间裕度很低,约为0.08,如附录A 图A10(b)和A11(b)所示;而CIPCM PET 利用端口跨相并联结构,将端口功率分担至两相中,从图A10(a)和A11(a)可以看出,CIPCM PET 从拓扑结构上便能够降低系统功率不平衡程度,相间裕度得到提升,约为0.22。
1.0 s 时启动PTS,在PTS 启动和运行过程中,6 个端口的电压始终稳定在750 V,如附录A 图A6 所示。PTS 启动后,由于端口6 的负载最大,且如图A12(a)所示,H 桥c3 和b4 的调 制比mc3和mb4不满足|mc3-mb4|>0.02 的条件,无法进行功率转移,相内裕度此时无法提升,约为0.04。同时,mc3>0.95 且mb4>0.95,在PTS 流程图的分支2 中,2 个H桥之间也不具备功率转移能力,因此H 桥c3 和b4 之间没有功率转移发生。而CIPCM PET 中隶属于端口1 至5 的DAB 两两之间开始进行功率转移,如图A8 所示。随着功率转移的进行,从图A10(a)和A11(a)可以看出,CIPCM PET 三相功率不平衡程度降低,相间裕度随之提升。在5.0 s 时,CIPCM PET 相间裕度已经提升至0.45。而NICM PET 由于无法进行功率转移,如图A9 和A11(b)所示,其相间、相内裕度均无法提升。PTS 实施前后,CIPCM PET 与NICM PET 三相功率不平衡度以及CIPCM PET 端口功率变化情况分别如附录B 表B3和表B4 所示。仿真结果表明,CIPCM PET 由于各端口跨接在两相中,其拓扑结构天然具有缓和功率不平衡、提升PET 安全稳定运行裕度的能力。PTS能够根据CIPCM PET 相间裕度和相内裕度的对比判断实现功率转移,进一步提升CIPCM PET 安全稳定运行裕度。
5 结语
本文构造了一种CIPCM PET,并建立了CIPCM PET 安全稳定运行区域的解析模型。基于此给出了CIPCM PET 安全稳定运行裕度的定义和计算方法,提出了以提升CIPCM PET 安全稳定运行裕度为目标的PTS。通过仿真得到以下结论:
1)CIPCM PET 利用端口跨相并联结构,将端口功率分担至两相中。与NICM PET 相比,能够从拓扑结构上降低系统功率不平衡程度;
2)采用本文提出的PTS 能够进一步提高CIPCM PET 安全稳定运行裕度。
后续研究将建立CIPCM PET 小信号动态模型并基于此模型进行小信号稳定性分析,研究CIPCM PET 控制参数的优化设计。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
