可保持式大蒜种带播种机的设计
2022-10-30谢煜喆王继伟高秀生陈凤刘焕伟胡彩旗
谢煜喆,王继伟,高秀生,陈凤,刘焕伟,胡彩旗
(1.266109 山东省 青岛市 青岛农业大学 机电工程学院;2.265200 山东省 莱阳市 莱阳市农业机械研究所)
0 引言
大蒜是我国优势极为显著的特色农产品之一,我国也是世界上最大的大蒜生产国和出口国[1-3]。目前,我国大蒜总种植面积约为75 万hm2,居世界首位[4-5]。
为了保证大蒜播种出苗率、提高大蒜产量,蒜种播入种沟要求鳞芽直立向上。由于大蒜形状的不规则性,目前大蒜的机械化播种难以完全解决这一问题,因此长期以来大蒜种植主要依靠人工播种完成,劳动强度大、生产效率低,成为制约大蒜产业发展的瓶颈问题之一。实现大蒜播种的机械化,确保大蒜播种精准定向,提高大蒜播种的正头率,是当前迫切需要解决的问题[6-7]。
蔬菜种绳播种机通过对包衣的小籽粒种子所编织的种绳进行播种,满足了精量化播种的需求,减少了传统播种不均匀带来的间苗和补苗的工作量[8-9]。受此启发,本文提出通过对加宽的种绳所形成的种带播种,实现蒜瓣鳞芽朝上入土,提高大蒜机械化播种质量。运用三维软件SolidWorks 对种带播种机构、种带定向保持机构、开沟装置、施肥装置等零部件进行设计和三维建模,并运用多体动力学分析软件ADAMS 对主要播种机构进行运动仿真,获得大蒜播种过程中种带和蒜种关键点的运动轨迹曲线,确保该种带播种机能够满足大蒜种植鳞芽朝上和精量播种的农艺要求。
1 大蒜种带播种机关键结构设计
1.1 大蒜种子外形尺寸测量
为了确定播种机构的尺寸,随机抽样100 个大蒜种子进行外形长度、宽度和高度的尺寸测量(如图1 所示),测量结果见表1。

图1 大蒜种子尺寸测量Fig.1 Garlic size measurement
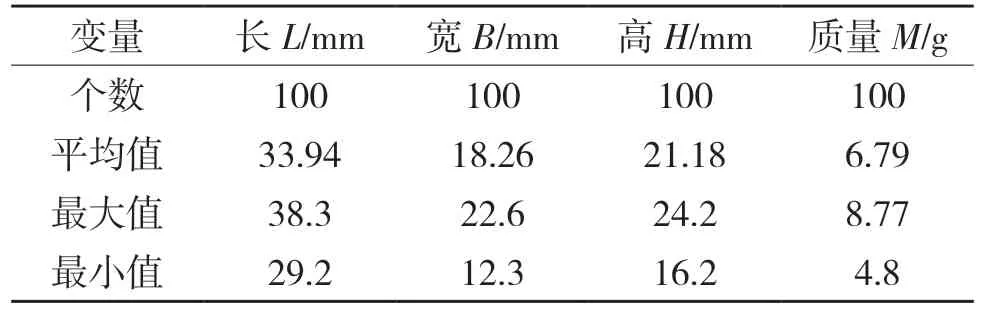
表1 大蒜种子主要尺寸统计表Tab.1 Main dimensions of garlic
为了保证播种时大蒜种子的行距和株距,根据大蒜种植的农艺要求,将种子以固定的间距,统一的姿态,定向包裹密封在带状且可降解的薄膜中,即制成大蒜种带。种带的尺寸根据表1 大蒜种子外形尺寸确定,并由此确定播种机构的双侧镇压滚轮间距为24.5 mm,镇压滚轮直径为50 mm。
1.2 种带盘结构
大蒜种带缠绕在种带盘上,种带盘置于支架上,播种机工作时种带盘转动,种带排出,当种带用完时,可快速更换已绕满种带的种带盘。种带盘与种带盘支架结构如图2 所示。

图2 种带盘及其支架Fig.2 Seed tape trays and their supports
1.3 可保持式定向播种装置
为保证大蒜种带在播种过程中的姿态不变保持定向,通过可保持式定向播种装置使大蒜种带按照各滚轮所设定的轨道运动,实现定向播种。为增大摩擦力,又不损伤大蒜种子,滚轮采用橡胶材料。
可保持式定向播种装置主要由机架、轴承座、主动滚轮、镇压滚轮、换向滚轮、链轮及传动主轴组成。地轮转动过程中,通过链轮和链传动,驱动主动滚轮转动,主动滚轮通过摩擦带动镇压滚轮转动,大蒜种带在主动滚轮和镇压式滚轮的可保持式夹持输送下,按照既定轨道行进,且种带线速度与机器行进速度一致,最后落入大小交错双圆盘开沟器已开好的种沟中。可保持式定向播种装置结构如图3 所示,种带的行进路线如图4 所示。

图3 可保持式定向播种装置Fig.3 Maintainable directional seeding device
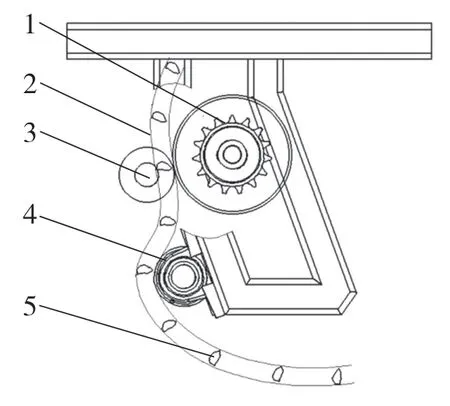
图4 种带行进路线图Fig.4 Route map of planting rope
该种带播种结构简单,制造容易,工作可靠。为了保持种带不偏转,双侧镇压滚轮间距根据所测大蒜种子宽度确定为24.5 mm。同时,为了确保种带线速度与机器行进速度一致,地轮直径确定为500 mm,主动滚轮直径为100 mm,地轮链轮与可保持式定向播种装置链轮传动比为0.2。
1.4 大小交错双圆盘开沟器
大小交错双圆盘开沟器如图5 所示,主要由大圆盘、小圆盘、轴承及轴承端盖、立柱等零部件组成,此开沟器随着机具作业时可同时开出两条沟,满足播种与施肥要求,交错排列的双圆盘能够提高切土、切断杂草残茬能力。

图5 大小交错双圆盘开沟器Fig.5 Size staggered double disc opener
综合考虑大蒜种植农艺要求,取大圆盘直径为φ340,小圆盘直径为φ310,两者均为平面圆盘,两圆盘前后、上下交错,这种布置方式可使开沟器开出深度不同、位置不同的两条沟。大蒜播种时种沟沟深一般为5 cm,然后蒜种上方覆土1 cm,所以小圆盘开出的浅沟进行播种,大圆盘开出的深沟进行施肥,实现肥料与大蒜种子水平方向相距5 cm、深度方向相距3 cm,实现种肥分施,避免肥料与蒜种直接接触,造成烧种、烧苗现象,影响大蒜产量。由于大小交错的布置形式,使得大小交错双圆盘开沟器作业时会产生较大侧向力,在整机使用时应对称安装,抵消侧向力,并且立柱选用刚度较强的材料[10-11]。
大小交错双圆盘前端交点为开沟器聚点m,如图6 所示,聚点角度为β,大圆盘开沟宽度受大圆盘直径D1和圆盘夹角φ的影响;小圆盘开沟宽度受小圆盘直径D2和圆盘夹角φ的影响,大、小圆盘开沟宽度计算公式分别为[10]

图6 大小交错双圆盘开沟器聚点示意图Fig.6 Gathering point of size staggered double disc opener
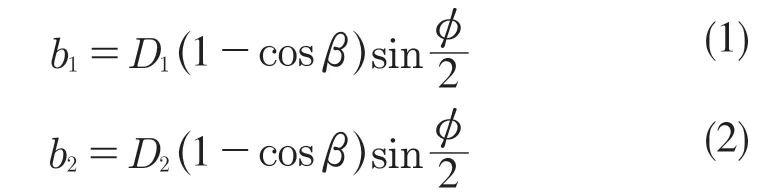
式中:b1——大圆盘开沟宽度,mm;b2——小圆盘开沟宽度,mm;D1——大圆盘直径(mm);D2——小圆盘直径,mm;β——聚点夹角,°;φ——双圆盘夹角,°。
由式(1)、式(2)可知,大蒜种带播种机开沟宽度主要由圆盘直径及夹角决定。
2 大蒜种带播种机整体结构
2.1 整体结构介绍
可保持式大蒜种带播种机由种带盘、施肥装置、三点悬挂、机架、地轮、大小交错双圆盘开沟器、可保持式种带播种装置、覆土器、镇压器及安装附件等组成,能够实现双行播种,配套动力为58.8 kW,结构如图7 所示。

图7 大蒜播种机整体结构Fig.7 Structure of garlic planter
2.2 工作原理
该大蒜种带播种机工作时通过三点悬挂由拖拉机牵引前进,所有动力由地轮通过链轮和链传动传递到各个机构。
(1)大蒜种带播种机播种结束后再施肥易造成种带移位甚至断裂,因此采用种肥并行分施结构。施肥装置主要由肥料箱、排肥器、大小交错双圆盘开沟器等零部件组成。地轮转动过程中,通过链轮和链传动为施肥装置提供动力,肥料箱中的肥料在外槽轮式排肥器的作用下进入排肥管,然后落入大小交错双圆盘开沟器开好的肥沟中。
(2)种带盘中的大蒜种带在主动滚轮和镇压滚轮的可保持式夹持输送下,通过播种装置进入大小交错双圆盘开沟器开好的种沟内。
(3)播种完成后,由覆土器将肥料与种带覆土,镇压器进行镇压覆盖。
3 基于ADAMS 的播种装置仿真分析
多体动力学分析软件ADAMS 能够对虚拟样机进行运动学、动力学及静力学仿真分析。为了进一步分析可保持式定向播种装置的定向性能,掌握大蒜在播种过程中的姿态,本文运用ADAMS 对可保持式定向播种装置进行运动仿真。首先,在ADAMS 环境下建立种带播种装置系统模型,并对各相关零部件添加约束;然后对可保持式大蒜种带定向播种装置进行运动分析。整体机构的前进速度与主动滚轮线速度保持一致。为了准确获取在播种过程中大蒜的姿态,选取种带中的一个蒜瓣,在蒜瓣的鳞芽部与根部各建立一个标记点158(鳞芽部)和159(根部),标记点位置如图8 所示。分析并提取蒜种的质心及2 个标记点随时间变化的运动轨迹曲线如图9 所示。

图8 蒜瓣标记点Fig.8 Garlic marker points

图9 蒜瓣运动轨迹曲线图Fig.9 Trajectory of garlic
ADAMS 仿真中坐标系原点在播种机构主动滚轮的圆心位置,初始位置1 为距离主动滚轮圆心上方250 mm 处,如图10 所示。

图10 蒜瓣下落过程示意图Fig.10 Schematic diagram of garlic falling
由图9 可以看出,由于种带行进速度与机组前进速度保持一致,蒜瓣位移整体上与时间成线性关系。标记点158 的运动轨迹曲线与标记点159 的运动轨迹曲线在1.0 s 左右发生突变,由此可以判断蒜瓣在主动滚轮与种带切点位置(图10 点2 处)由鳞芽倾斜向下转变为鳞芽倾斜向上;3.0 s 之后,标记点158、标记点159 与质心点的运动轨迹曲线基本都相对水平线平行,可以判断此时蒜瓣竖直向上。即经可保持式定向播种装置播种后,蒜瓣为鳞芽竖直向上状态,满足大蒜播种的直立性要求。
4 结语
在大蒜播种过程中,要求蒜瓣落入种沟时必须鳞芽向上才能保证大蒜出苗率。针对这一问题,本文提出了可保持式大蒜种带播种机的设计。首先,作为播种机构设计的依据和参考,统计测量了大蒜的外形尺寸;其次,主要进行可保持式大蒜种带播种机关键部件及其整机的设计,并用SolidWorks 进行三维建模;最后,基于动力学仿真软件对关键部件—可保持式定向播种装置进行运动仿真获得大蒜播种过程中蒜瓣的运动姿态轨迹。仿真结果表明:经过可保持式定向播种装置播种后,蒜瓣为鳞芽竖直向上状态,满足大蒜播种的直立性要求。
