不同模式多功能柔性传感器研究进展
2022-10-30汪小钰胡平操齐高李世磊胡卜亮葛松伟杨帆陈波朱昕宇王快社
汪小钰,胡平,操齐高,李世磊,胡卜亮,葛松伟,杨帆,陈波,朱昕宇,王快社
(1 西安建筑科技大学冶金工程学院,陕西 西安 710055;2 西北有色金属研究院电子材料研究所,陕西 西安 710016)
人体是一个复杂的多功能综合系统,可以同时识别压力、应变、温度、湿度、气体等各种信号,然后根据不同的信号采取相应的反应或行动。随着材料科学与微纳米技术的发展,柔性传感器进入了高速发展的时期。基于生物皮肤的工作原理,采用不同的传导方法将外部的刺激转化为电信号是柔性传感器研究的基本理论基础。通过模仿人体皮肤感知环境的传感器可以将各种形式的外部刺激转换为电信号,实现对外部信号的可视化传输和记录。同时,这类柔性传感器因具有轻便易弯折、灵敏度高、可靠黏附人体皮肤及衣物、无需医学专家和固定仪器帮助的特点,仅需穿戴在人体不同部位,即可从人体中获取重要生物信息(如运动、体温、血压或呼吸)的特性。这对未来便携式医疗保健系统的发展至关重要。
传感器根据其感应机理,可以分为电化学式、光学式以及重力式等。然而为了适应人体环境、便于安装和数据记录,基于电化学性能的柔性可佩戴传感器是目前研究最为广泛的类型。此类电化学式柔性传感器还可以分为电阻型、电容型、摩擦电和压电型等,它一般是由电极、活性功能层和柔性基体组成,其结构如图1中心插图所示。活性功能层将环境刺激转换为可检测的电信号。电极位于活性功能层的两侧,用于接收和传输电信号。柔性基体起到承载柔性传感器同时确保与生物皮肤或者其他材料相容的作用。其中,活性功能层是柔性传感器最重要的组成部分,它将环境刺激,如温度、湿度、压力等通过电信号形式定量的表现出来,赋予柔性传感器感知环境的能力。有些高精度的柔性传感器甚至比人类的皮肤更敏感,能分辨出呼吸引起的轻微空气波动和心跳振动。
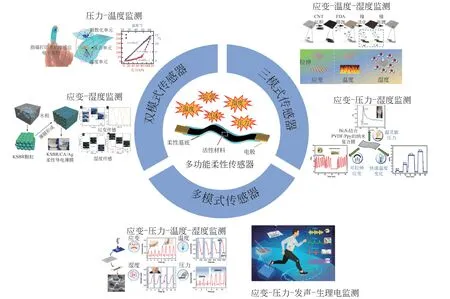
图1 具有不同模式的多功能传感器
现有的柔性传感器大多只能识别一种环境刺激,最常见的如压力传感器及应变传感器。除此之外,还有一些对应变不敏感的柔性传感器可以单独实现对温度、湿度、气体等的监测。然而,人体是一个复杂的多功能综合系统,可以同时识别压力、应变、温度、湿度、气体等各种信号,从而根据不同的情况采取相应的行动。单模式传感器不能为传感系统提供足够的信息,因此迫切需要开发具有不同模式的多功能传感器来监测和区分各种外部刺激。
随着柔性传感技术的发展,已经出现了大量可以实现多模式识别的柔性传感器。使用多个单独的传感器合并到一个常见的柔性传感器设备是一种直接的途径,可以同时监测多个刺激。然而,不同功能传感器的集成涉及到复杂和昂贵的制造过程,这限制了其广泛的商业应用。此外,在集成的柔性传感器系统中,仍然很难确保这些多重刺激之间没有串扰。将每个刺激转导为单独信号的多功能传感器可以克服这些限制。本文就多功能柔性电化学传感器的最新研究结果进行了综述,如图1 所示。根据传感模式的数量来描述不同的模式,即传感器可以检测两种刺激(压力-应变、压力/应变-温度、压力/应变-湿度、压力/应变-气体)、三个刺激(压力-应变-温度、压力-温度-湿度、压力-温度-气体等)以及三种以上的刺激(压力-应变-温度-湿度等),它们分别被定义为双模式传感器、三模式传感器和多模式传感器。
1 双模式传感器
人体运动状态的识别监测是可戴人工智能传感器的基本功能,然而想要实现人体健康的全面评估,还需参照体温、皮肤湿度、呼吸状态等重要生理参数的变化状态。对此研究者们在应力、应变传感器基础上,通过结构设计或材料设计的方法构建具有连续温度、湿度、气体识别及监测功能的柔性传感器,以此开发出具有双功能/双模式的柔性传感器。
1.1 压力-应变监测
触觉感知是人体皮肤的主要功能,主要是指对自身变形和环境压力的感知。因此,具有灵敏度高、响应/恢复时间快、耐久性好的柔性压力-应变传感器有望成为人类皮肤与周围环境相互作用的重要介质。由于柔性传感器具有易变形的特点,外部的应力刺激极易对传感器活性材料层的电阻、电容等相关电学性能产生影响。目前研究显示,柔性传感器最简单的功能就是识别外部的压力/应变刺激。
理论上,任何一种导电材料和柔性基体都可以通过合理的结构设计实现感应功能。这是由于机械刺激易破坏导电材料在柔性基体中构建的导电网络,从而引起相关电学性能的改变。即当柔性传-感器受到机械刺激(压力或应变)时,可以测量复合物的电信号来反映机械刺激的变化。当机械刺激被移除时,由于其弹性导致迅速恢复初始电阻。柔性基体通常包括高分子聚合物、水凝胶及纺织物等,为传感器提高可变形的机械性质。而导电材料决定了传感器的感应性能,常见的导电材料包括金属纳米材料、碳系材料。
常见的导电金属纳米材料包括银、金等。除了球形颗粒形态外,具有一维结构(线状)的金属纳米材料因为具有更好的弯折能力,在柔性电子领域同样具有广泛应用。Chen等采用一种用分层聚氨酯(PU)纤维编织的纤维形状的纺织品,用银纳米线(AgNWs)和苯乙烯-苯二烯-苯乙烯涂层制造多功能电子纺织品。由于AgNWs 导电网络、PU纤维固有的拉伸性和分层结构,制备的电子纺织品具有高导电性、高拉伸性、高灵敏度、应变和压力的多重检测能力。Wang 等报道了一种金纳米颗粒(AuNPs)组装且三维互连石墨烯微通道嵌入的PDMS(3DGMC-PDMS)薄膜,可用作超灵敏的压力和应变传感器,AuNPs-GMC-PDMS 薄膜对压力的响应主要取决于石墨烯内壁接触状态的变化。然而,如果薄膜是纵向拉伸的,测量电流的变化值主要依赖于导电壁的水平变形或断裂。Lyu 等提出了一种基于聚吡咯(PPy)和玫瑰状银花装饰针织棉/氨纶织物(KCSF)的多功能电子纺织品的制造策略。通过电沉积法在PPy表面生长的玫瑰状银花可以进一步提高织物的表面粗糙度和压力敏感度。Zhao等设计了一种可以实时测量和区分接触参数的柔性传感器,这种柔性传感器是通过集成基于三维空心MXene 球体/AgNWs 混合纳米复合材料的嵌入式可拉伸电极和基于四针状氧化锌晶须(TZnOws)/PDMS 薄膜的电容压力传感器制造的。这种应变-电阻模块和压力-电容模块分别在稳定性和响应时间方面表现出优异的传感性能。
以石墨烯为代表的碳系材料,具有完美的导电性、较高的化学稳定性以及易功能化的优点,使得其在传感领域具有广泛的应用。Li等提出了一种新方法,通过在3D 打印的聚醚醚酮波纹衬底上激光诱导生成石墨烯(LIG),从而制造具有3D 微观结构的柔性石墨烯传感器。压力和应变会直接改变石墨烯的接触状态,进而影响传感器的电阻值。在此基础上,开发了两个集成的压阻式传感器来监测精确应变和压力信号。Zhao等制造了一种基于三维管状石墨烯海绵(TGS)和蜘蛛网状可拉伸电极的柔性双参数压力应变传感器。作为压敏模块,独特的3D-TGS具有不间断管状石墨烯网络和高石墨化度,可压缩至约20%而不会塌陷,显示出强大的可压缩性。通过喷雾包埋工艺将AgNWs 和碳纳米管(CNTs)的分层多尺度杂化纳米复合材料制备成蜘蛛网状的可拉伸电极,以此作为应变敏感模块。比较蜘蛛网状柔性电极的输出信号,可以同时有效地监控施加力的大小和方向。
MXenes是一种新兴的二维碳化物和碳氮化物,具有优异的力学性能,具有超高的弹性模量,可以帮助其在一定程度上承受应力和变形。另外,MXenes 与石墨烯具有相同性质,包括超高的导电性和机械柔性,同样是制造可穿戴电子器件的理想材料。Wang 等通过在棉纤维基底上构建2D MXene纳米片和零维硅纳米颗粒(SiNPs),成功制备出了防水和高灵敏度可穿戴的MX@SiNPs 传感器。由于外部压力刺激,棉纤维上更多的导电路径变短,导致电流增加,从而导致电信号的变化。因此,该传感器对压力、弯曲和扭转变形表现出高性能传感响应。Cao 等通过使用皱褶的MXene 薄膜作为单电极模式摩擦电纳米发电机(TENG)来实现自供电的压力和应变传感器。由于褶皱薄膜在原始状态下是聚集的,当被逐渐拉开时,有效导电路径变长,会导致单位长度的薄膜电阻增加。而压力传感是基于薄膜的压电效应:随着手指的按压力增大,与褶皱表面的接触面积增大,导致输出量增加。
导电聚合物也是一种常见的碳系材料,具有极好的柔韧性和弹性,同时其导电性能可以通过调节生产工艺和化学掺杂的手段改变。导电聚合物,如聚苯胺(PANI),易与水凝胶基体结合制作柔性导电材料及传感器。水凝胶材料是一种将氢键、静电相互作用和疏水效应整合到聚合物网络中制备出的弹性体,具有高度拉伸、自愈合和易恢复的特点。将水凝胶作为柔性基体,是赋予柔性传感器自愈合能力的有效方法。为了赋予水凝胶导电性,可以在水凝胶中直接掺入导电粒子,或预聚物中原位聚合导电高分子以形成均匀、连续的导电网络。同时,这种导电网络易受机械刺激而断裂和重连,以此产生感应能力。Wei等以聚乙烯醇(PVA)为基体,PANI单体进行原位聚合以构建导电网络,再以戊二醛为交联剂进行交联,合成了导电水凝胶(CCH)。生物相容导电复合水凝胶作为可穿戴式传感器,能够检测微小应变和大应变(0~300%)和压力(0.01~30kPa)。Wang 等在苯胺、聚丙烯酸(PAA)和植酸(PA)混合形成的均质溶液中原位聚合苯胺单体,得到导电水凝胶复合材料。其中,PAA 链可以与PANI 链形成丰富的分子间氢键以及静电相互作用。而PA 分子除了作为掺杂剂(提供了额外的物理交联点,显著提高了复合材料的电导率和强度)外,还可以形成氢键,并与PANI 链产生静电相互作用。这种非共价氢键和静电相互作用对自愈合至关重要,允许水凝胶在环境条件下自主恢复电学性能和机械性能。最重要的是,复合材料的电阻会随施加的应变和压力而变化,因此具有灵敏的传感特性。
以上具有压力-应变双模式的柔性传感器为电子皮肤触觉感觉的实现提供了解决方案,并在生理信息监测和人机交互等通用应用中发挥了重要作用。部分双功能传感器的性能参数如表1所示。由表1可见,基于电阻式传感机制的柔性材料更多应用于压力/应变传感器,这是由于外部机械刺激极易对柔性导电材料内部的导电网络产生影响,进而在宏观上改变了材料的电阻。同时,这类电阻式柔性传感器通常都具有制造简单、灵敏度高、工作范围广、稳定性好、成本低等特点。然而,以电阻变化为单一输出信号的双功能传感器在实际应用中大多需要分开监测压力或应变刺激,难以实现压力-应变的同时监测,且不同刺激信号间易产生干扰。对此,开发具有多传感模式的多功能传感器是十分必要的。
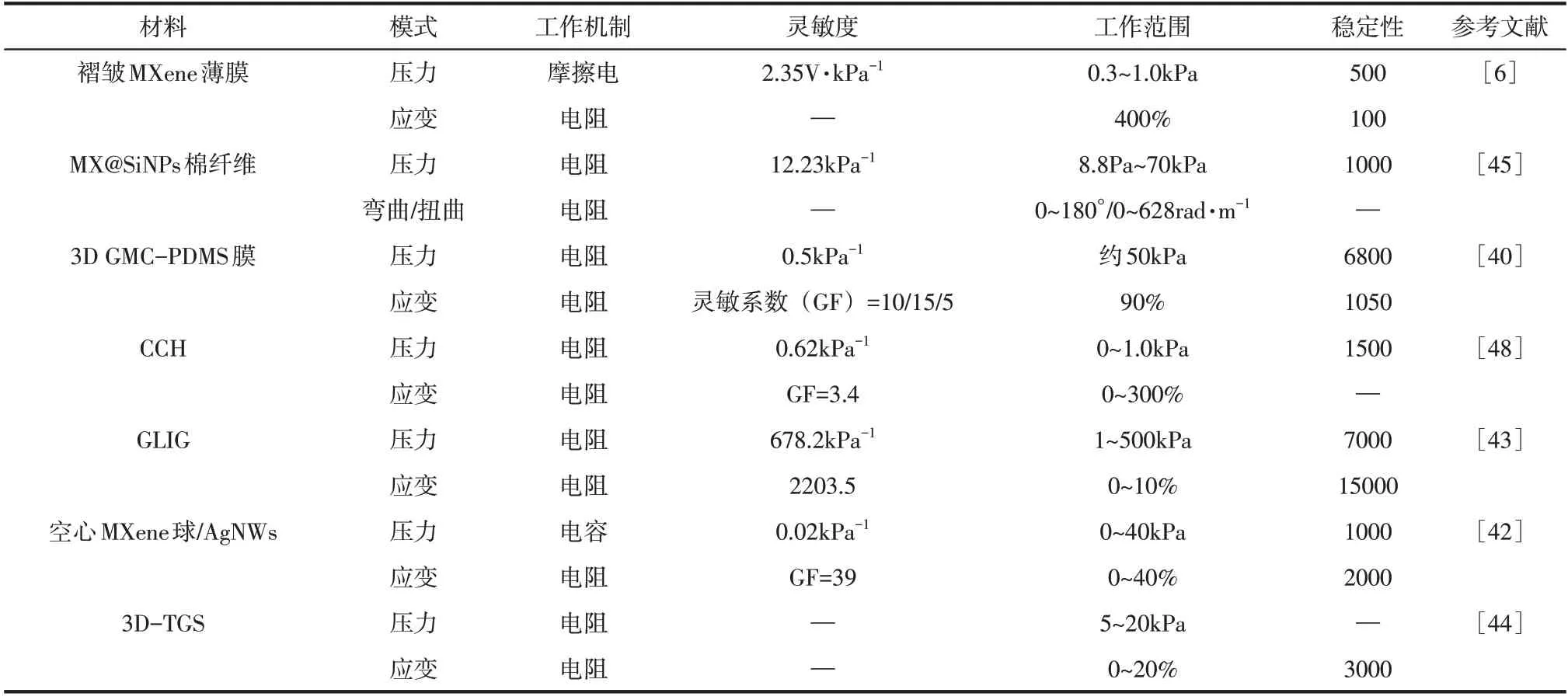
表1 具有压力和应变模式的多功能传感器的性能总结
1.2 压力/应变-温度检测
体温是人体最重要的生理健康指数之一。高精度体温监测可为人体健康信息的获取提供一种快速、简便且功能强大的标准途径。具有压力/应变-温度双功能的柔性传感器可以实现对人体运动及体温的同时监测,这对人体运动健康状态、部分疾病的诊断及疗效检测具有重要的应用价值,同时其较好的柔性可增添穿戴设备的舒适感。因此,此类双功能传感器受到研究者的广泛关注。
然而,温度刺激与压力/应变此类机械刺激不同,不会影响柔性基体内部的导电网络,而是直接改变电子迁移速率,影响材料电阻,此类具有温度响应的材料通常称为热敏材料。为了赋予柔性传感器具有压力/应变-温度双功能传感特性,可以垂直/分区组合具有机械刺激感应和温度感应的柔性材料,得到组合型传感器实现双功能感应性能。或将同时具有高导电性和热敏特性的先进功能材料引入柔性基体,以单一材料或结构实现传感器的双功能性。
组合型的压力/应变-温度双功能传感器,制造简单、检测率高、不同感应信号间干扰较小,已受到大量研究者的关注。Zhu 等展示了一种结合激光制造和丝网印刷的3D 加工技术,以构建垂直结构的压力/温度双峰有源传感器[见图2(a)]。该传感器采用有机功能材料,即压电聚(偏氟乙烯共三氟乙烯)[P(VDF-TrFE)]和热电聚苯胺(PANI)基复合材料。压电材料用于压力感应,热电材料用于温度传感,该设计可将压力和温度刺激转换为两个无干扰的独立电信号。Wang 等通过激光蚀刻技术,将薄膜热电材料(n-BiTe、p-SbTe)和导电多孔微锥弹性体(Ag/Ti/PDMS)同时沉积柔性衬底上的,提出了一种自驱动的温度-压力双峰传感器,该传感器可同时实现温度和压力感应[见图2(b)]。Zhu 等开发了一种新型的全弹性体柔性传感器,用于高灵敏度的压力和温度传感。研究者采用区域划分策略,将指纹划分为一个中心的温度传感区域和四个外围区域进行分布式压力传感[见图2(c)]。该传感器将压痕膜图案的应变隔离结构嵌入到电子皮肤中,有效地提高了灵敏度,减少了压力和温度单位之间的相互干扰。Zheng 等通过将压力传感层和温度传感层垂直集成在同一织物内,获得了双模式柔性传感器。该纺织品由掺杂氧化锌纳米颗粒和柔性耐热碳纳米纤维(CNF)的压电聚偏二氟乙烯(PVDF)纳米纤维膜组成[见图2(e)]。这种一体式柔性传感器纺织品可以精确执行压力感知和温度检测。柔性传感器纺织品可以执行环境温度检测、呼气温度监测、外部压力感知、人体脉搏捕获和触觉空间映射等多种功能,具有出色的传感能力。
基于单一材料或结构的压力/应变-温度双功能传感器,结构简单、成本低。此类传感器通常是将热敏材料通过涂覆/填充的方法,与导电弹性材料结合得到多功能材料,以实现双模式传感。因此功能材料的选择非常重要。现有相关报道中,金纳米颗粒、氧化石墨烯、碳纳米管及聚(3,4-乙基二氧噻吩):聚苯乙烯磺酸盐(PEDOT:PSS)等兼具导电性和热敏性的功能材料通过与柔性基体复合,均制备出了双功能响应传感器。例如,Yang等设计出了一种基于PEDOT:PSS热电材料的自供电弹性导体。该弹性导体利用薄膜两端温差产生的热电电压,可实现自供电温度传感和拉伸应变传感。Jang 等在聚(3-己基噻吩-2,5-二基)(P3HT)涂层弹性碳泡沫底部结合叉指电极的设计,可用于制造高性能压力传感器[见图2(d)]。由于P3HT的热电特性,所制造的温度传感器在接近体温的范围内(25~55℃)显示出82.5μV/K 的高灵敏度。同时,具有夹心型结构的双模式传感器,使其能够通过使用由温度梯度产生的热电电压来检测压力。Lee等设计了一种能够检测和区分不同物理刺激的柔性多功能传感器。传感器以电纺碳纳米纤维薄膜作为唯一的传感材料[见图2(f)],电阻作为唯一的输出信号,可同步、实时检测和区分微小的温度和压力刺激。
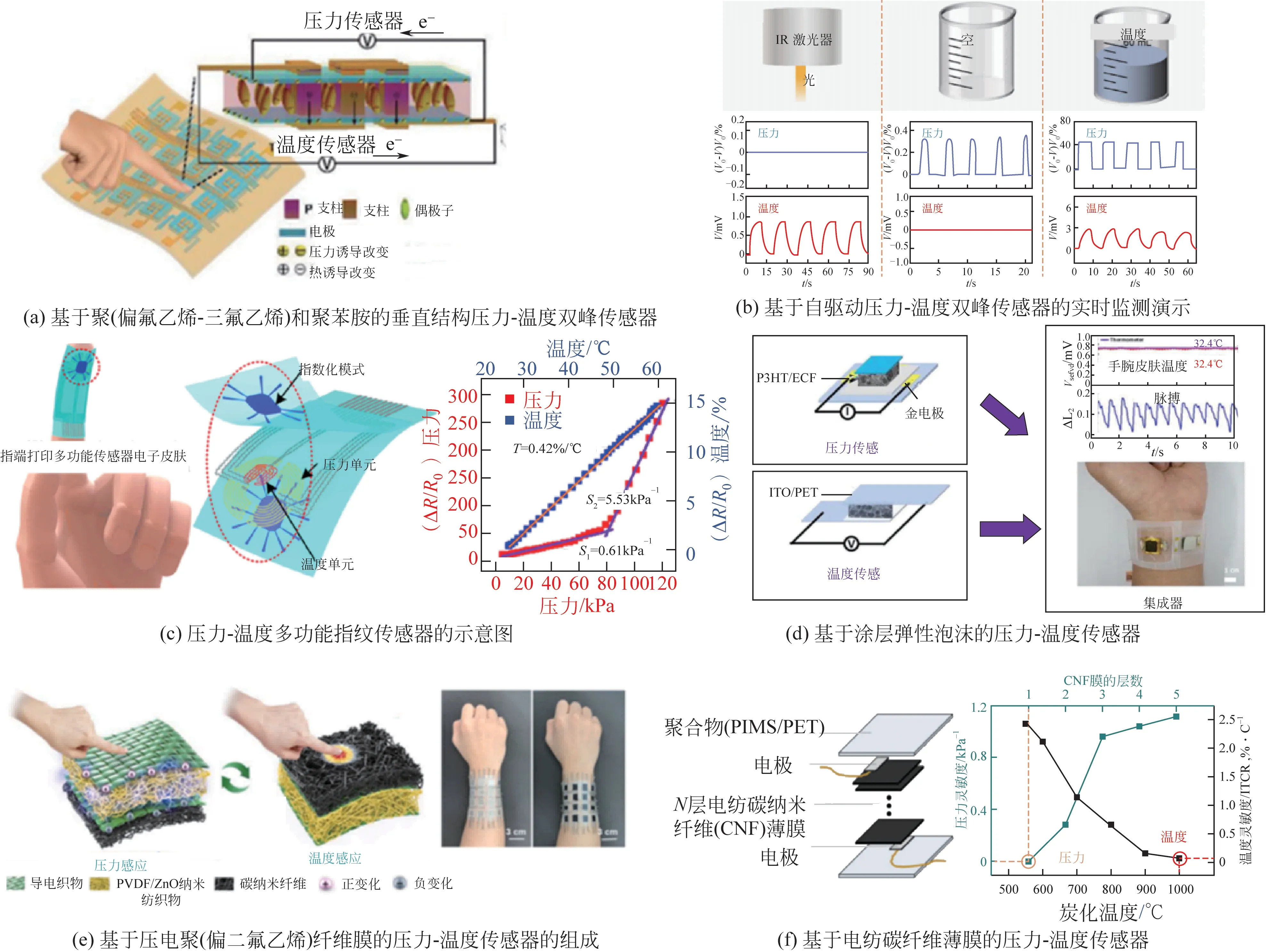
图2 具有压力/应变-温度双模式的柔性传感器[51-54,60-61]
柔性传感器通常较易实现对压力/应变的识别,如果想在压力/应变传感器上构建温度识别功能,结构设计是一种常见的方法。前期研究大多基于结构设计的方式,在柔性压力/应变传感器上继续添加热敏材料得到柔性温度传感层,以此可实现压力/应变-温度的双传感功能。这种传感器不同感应信号之间的监测干扰较小。但是,通常需要复杂的制造过程(许多材料和专门的生产步骤)以及高成本。最新研究表明,可通过设计单一材料/结构降低多功能传感器的结构复杂性,然而此类传感器对功能材料和柔性基体的要求更高。因此,开发多功能材料对柔性传感器的轻便化有重要研究意义。
1.3 压力/应变-湿度监测
柔性湿度传感器可用于非接触式指尖湿度检测和人体呼吸频率检测,通过监测皮肤的水合作用水平,可以评估各种与运动相关的人体生理状况,进而评估人体健康状态。想要实现压力/应变-湿度双功能感应,则需要选择合适的湿敏材料和器件结构设计,结构设计与压力/应变-温度传感器类似,而湿敏材料的选择非常重要。到目前为止,用于制造单一柔性湿度传感器的材料主要包括纤维素纸、碳系材料、聚合物、石墨烯以外的二维材料及相关的复合材料。
然而,以单一感应材料为传感单元的压力/应变-湿度双功能传感器,相关报道较少。多数传感器以多组分复合材料作为多功能感应单元,这种设计会在不同材料间形成协同效应,可有效提高传感器的性能。Ouyang基于全纤维多层纳米结构的摩擦纳米发电机,提出了一种真皮结构的仿生自供电多功能柔性传感器[见图3(a)]。以掺杂了酸化碳纳米管的胶原聚合物(CA)纳米纤维(CA-M NFs)作为湿度传感层,由于天然CA 的有效吸收-脱水效应,再加上内部酸化碳管中的氢键对HO的吸附和解吸引起的电导率阈值的变化,CA-M NFs 显示出湿度感应特性,然后与摩擦电压力传感层垂直组装,赋予传感器压电性能;所制备的柔性传感器通过能量循环系统,可将机械能转化为电能并用于湿度检测,实现传感器的自供电能力。Zhao等利用石墨烯与二硫化钼微器件,加工得到了集成传感阵列[见图3(b)],独立的底部石墨烯器件和顶部二硫化钼场效应晶体管分别作为应变传感器和湿度传感器,有效地避免了不同测试信号的干扰。其中,二硫化钼膜由于物理水分子吸附作用,赋予传感器水分响应性能。Khalifa等采用涂有石墨烯的纤维素纸,通过真空过滤法(V-CGN)制备了高灵敏度、快速响应湿度和压阻的传感器[见图3(c)]。由于水分子的吸附会降低石墨烯的空穴浓度和电子迁移,传感器的电导率会随着水分子的增加而降低,以此产生湿度感应功能。同时,纤维素纸作为一种天然的亲水性材料,可增强传感器的吸水性,从而提高检测准确性。此外,由于石墨烯的压阻特性,湿度传感器同样具有压力感应功能。Xu 等以羧基苯乙烯-丁二烯橡胶、柠檬酸(CA)和硝酸银制备了具有稳定的应变传感能力的导电橡胶膜[见图3(f)]。由于CA 的吸湿性,该导电膜对湿度表现出电阻响应能力,可以作为湿度传感器。此外,引入了AgNPs 的柔性导电膜对大肠杆菌(革兰氏阴性菌)和金黄色葡萄球菌(革兰氏阳性菌)表现出优异的抗菌活性,作为柔性抗菌材料具有潜在的应用。
图3 具有压力/应变-湿度双模式的柔性传感器[18,64-68]
上述湿度传感器是基于水分子对功能材料导电性的影响而设计的。对于某些特殊的结构基体,如聚合物或水凝胶,水分子会改变基体状态,进而影响整体的导电路径。Miao等受皮肤的启发,利用碳纳米管-聚二甲基硅氧烷(CNT-PDMS)复合材料制备了一种具有海绵状褶皱结构的湿度和压力传感的双功能传感器[见图3(d)],其中褶皱的CNTPDMS作为湿度传感器,多孔CNT-PDMS海绵作为压力传感器。高CNT 浓度导致大量的CNT-CNT 连接,这使接触电阻成为电阻变化的主要因素。在潮湿环境下,水分子不仅减少了暴露在褶皱表面的CNT 的连接,而且使CNT-PDMS 膨胀。这种膨胀扩大了聚合物链基体,减少了褶皱结构中的CNTCNT 连接,进一步削弱了CNT 接触电阻的电导率。另外,褶皱结构支持更亲水性和各向异性的润湿表面,扩大了表面润湿面积,提高了湿度传感性能。作为压力传感器,当正向力施加到多孔CNTPDMS上时,空腔结构发生弯曲和塌陷,会导致大量CNT 连接,使得CNT-PDMS 的导电面积增加。Zeng 等为了实现多功能性,合成了一种淀粉/聚丙烯酰胺双网水凝胶材料(STH),并制备了压阻应变传感器和湿度传感器[见图3(e)]。通过在水凝胶混合物中引入NaOH 以形成Na和OH,获得离子电导率。作为应变传感器,在变形时导电离子迁移路径的距离发生变化,会导致水凝胶的电导率发生变化。作为湿度传感器,离子水凝胶的电导率主要由固有的移动电荷载体(Na)决定,其浓度和迁移率受制于水合网络的水含量。STH传感器在高相对湿度下电导率提高,是由于水分子的化学吸附和物理吸附,导致水凝胶的水含量增加和尺寸膨胀。而水凝胶较高的水含量使其能够拥有更高的导电离子溶解度,从而导致Na的数量增加。
综上可见,碳基材料在柔性湿度传感器设计中具有极大的潜力。特别是2D石墨烯、1D碳纳米管这类低维材料,具有较好的机械性及导电性,是设计柔性多功能传感器的理想材料。另外,多孔聚合物和离子基水凝胶的结构易受水分子影响,进而影响导电路径。这也是设计湿度-多功能传感器的有效方法。
1.4 压力/应变-气体检测
气体传感器根据感应功能主要包括两种类型:一种是检测气体强度或气流大小的传感器,一种是可以区分气体类型(化学气体)的传感器。
流感、肺炎等疾病常会引起人体出现呼吸短促、呼吸困难、呼吸不规则等症状,气体传感器的出现极大程度上方便了医护人员监测此类病人的呼吸强度及频率。此类呼吸传感器的感应机理与压力/应变传感机理相似,不同呼吸强度引起结构内部的导电网络变化,因此可以认为是具有超高灵敏度的压力/应变传感器。Tang等将可控石墨烯-纳米壁褶皱与聚二甲基硅氧烷(PDMS)弹性体相结合,研制出一种高灵敏度、低成本的柔性压阻传感器[见图4(a)]。传感器的超高灵敏度通过在复合弹性体表面构建褶皱的微观结构来实现。研究者利用有限元方法对传感器的工作机理进行了分析,发现起皱周期对传感器的性能起主导作用。起皱的石墨烯传感器能够检测到从微弱刺激到大压力的各种信号,例如检测弱气体和足底压力。另外,孔隙结构的柔性基体有利于气流的透过性,也可以有效提高压力/应变高传感器的超高灵敏性。Clevenger等使用氧化化学气相沉积法(OCVD)在各种日常织物上均匀地涂覆聚(3,4-乙基二氧噻吩)(PEDOT)作为聚合物导电层,使得传感结构兼具柔性和导电性。特别是OCVD技术能够形成厚度可控的图案化聚合物薄膜,同时保持了织物的固有优点,如特殊的机械稳定性和透气性。涂有PEDOT 涂层的纺织物,由紧凑堆叠的螺纹组成,其电阻由每个PEDOT 涂层螺纹的内电阻和它们之间的接触电阻的组合而成。在按压过程中,与接触电阻有关的交叉路径的传输性能提高,因此电流上升。而作为呼吸传感器,气体通过会导致涂层螺纹相互分离,接触电阻增加。然后,研究者直接在一次性手套和口罩上沉积和制作PEDOT,成功地制造了压力和呼吸监测传感器。
化学气体传感器可以检测环境中的有害气体,有效保护人体健康。此类气体传感器大多依赖于氧化还原反应或部分电荷转移来改变电导率。Wei等将纳米黏土、炭黑(CB)和聚合物(TPU)分散在有机溶剂中,制备嗜硫性油墨,然后直接书写制备出了3D 结构的应变和气体(挥发性有机物)传感器[见图4(b)]。压缩时CB粒子之间的连接数量增加,使得传感器具有应变感应能力。另外,由于3D 结构暴露在挥发性有机化合物中会使聚合物基体膨胀,导致CB 粒子分离,从而破坏电导率的途径,形成气敏特性。同时,溶胀过程并不改变聚合物化学成分,在被吸收的挥发性有机化合物蒸发后,电阻响应性会恢复到预暴露状态。Won等报道了一种包覆导电钯纳米颗粒/聚氨酯(PU)复合外壳的光纤多模式传感器。研究者通过简单的溶液工艺,将钯纳米颗粒嵌入PU 纤维表面,成功制备了光纤传感器,该传感器可用于裂纹应变和H传感。气体传感效应是基于外壳中致密的PdNP 网络形成了一个与H气体敏感性密切相关的导电网络。纯Pd 的晶格常数为3.889Å(1Å=0.1nm),而当它暴露在H中时,H 原子被并入Pd 层的表面,从而形成一个晶格常数为4.025Å 的半导体Pd 氢化物(β-PdH)。这种PdH的电阻率比纯Pd 高1.9 倍,导致纤维的电阻增加,产生H感应。Zhi 等通过MXenes 与PANI/BC 纳米纤维的自组装,制备了兼具压力传感和气体传感的新型MXene/PANI/BC 气凝胶基传感器[见图4(c)]。将TiCT组装到PANI/BC纳米纤维上,改善了气体的吸附和扩散。同时其独特的三维结构和大量暴露的活性位点,保证了对目标气体的强吸附。因此,当传感器暴露在NH气体中时,可以更有效地进行PANI 的质子化和脱质子化过程,表现出良好的气体传感性能。
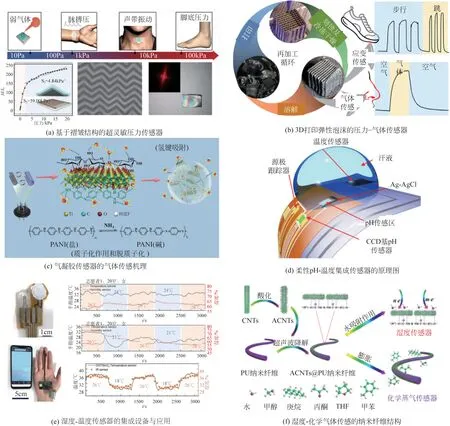
图4 具有压力/应变-气体双模式和其他双功能的柔性传感器[70-71,73-76]
气体传感通常为非接触式传感,想要实现传感器非接触情况下的快速感应,特别是对微弱信号的识别,对传感材料的灵敏度要求极高。从以上研究结果可见,碳基材料同样具有优异的气体传感功能。除常见的石墨烯、碳纳米管外,炭黑、还原氧化石墨烯、碳化物(如MXenes)等同样具有优异机械性能和导电性的碳基材料受到了科研工作者的关注。上述介绍的压力/应变-气体传感器使电子皮肤具备嗅觉感知功能和触觉感知功能,进一步促进了电子皮肤多功能性的发展。
1.5 其他双模式柔性传感器
应力/应变传感器大多基于可拉伸/压缩的柔性基体材料而设计。部分柔性基体,如聚亚酰胺薄膜只具有可弯折柔性,可以设计压力/应变不敏感的柔性传感器。此类传感器可以降低压力/应变对感应性能的干扰,可以集成温度、湿度、pH 或气体感应性能。
Nakata等使用一个柔性电荷耦合器件创建了一个灵敏的pH 传感器,并集成到一个温度传感器中,构建双功能传感性[见图4(d)]。其中pH传感器是在柔性聚亚酰胺膜(PET)上,依次沉积氧化铝层、SiO层和InGaZnO 膜组成。对于使用SiO层的pH传感,带有羟基(OH)的SiO的表面条件是很重要的。当溶液相互作用时,氢离子之间发生反应,导致羟基电荷发生变化。由于这一机制,pH溶液产生电子电荷,同时其密度取决于OH与H相互作用所对应的pH。因此,输出电压随pH的变化而变化。为了实现温度集成,在银电极上涂覆基于氧化锡纳米颗粒和单壁碳纳米管的混合物,可获得相对较高的灵敏度和稳定性。Lu等提出集成的柔性传感器系统,由基于ZnInS纳米片的湿度传感器和CNT/SnO温度传感器组成[见图4(e)]。湿度传感器是在激光诱导多孔石墨烯电极上沉积ZnInS纳米片制造的。湿度传感机制是基于质子跳跃过程HO和水分子之间,最高能量占据分子轨道-最低能量空置的分子轨道差距的半导体材料减少,导致电流增加。石墨烯电极的高孔隙率为ZnInS纳米片表面的水吸附和解吸提供了足够的空间,从而产生更好、更稳定的湿度响应。Huang 等通过将酸化碳纳米管(ACNT)装饰在PU 纳米纤维表面制备了一种具有湿度和化学蒸气感应能力的纳米纤维复合材料(CNC)[见图4(f)]。ACNT 表面含有羟基、羧基等含氧基团,这些活性位点赋予碳纳米管亲水性,从而能够吸收周围的水分子。被吸附的水分子与含氧基团之间存在弱氢键,ACNT的电导率也随之发生变化。另外,CNC传感器可以有效检测甲醇、庚烷、丙酮、四氢呋喃和甲苯的化学蒸气,机理是基于化学蒸汽的吸附和脱吸附,在此过程中,聚合物纤维被膨胀和脱膨胀,因此导电网络被破坏和恢复,导致循环传感试验中电阻的增加和减少。
在本文作者看来,柔性传感器的最大特点就是对应力/应变具有敏感性,这是由于外部机械刺激通常均会对柔性材料内部的相关电信号网络结构产生影响。为了方便传感信号的读取和记录,大量柔性传感器均是以电信号(电阻、电容、摩擦电等)作为输出信号。但是当传感器的传感模式增多后,特别是对仅靠单一传感材料的传感器,如何消除机械变形对其他传感电信号的影响,以及区分机械变形与其他刺激信号,是目前迫切需要继续解决的技术关键。上述研究成果中已有少量传感器可实现对机械刺激不敏感的功能,这对未来柔性多功能传感器的发展具有重要参考意义。
2 三模式传感器
虽然已有大量的研究围绕双模式柔性传感器取得了重大进展,但仍不足以满足医疗卫生领域对各种疾病的准确诊断,以及人体运动的多种复杂刺激的识别等实际应用。因此,三模式传感器的发展逐渐吸引了科研人员的注意力。三模式传感器在上述双模式信号传感外,建立新的刺激响应功能,以此增加传感器检测模式,提高传感器检测模式的多样性。
2.1 压力/应力-应变-温度/湿度检测
连续测量皮肤界面局部压力和温度的技术可为改进的评估风险的定量方法和提醒预防措施的必要性提供基础。由于需要检测众多参数,传感器变得越来越复杂且难以制造。为了降低制造的复杂性,可以在单一结构中构建具有多种刺激响应的导电网络。水凝胶、气凝胶和聚合物薄膜材料,通常通过合理地设计,可以兼具优异的机械性能、可拉伸/可压缩柔性。同时,这些材料容易负载导电和功能性材料,在多功能柔性传感器中有广泛应用。
水凝胶具有可调谐的生物相容性弹性模量,其力学特性与生物组织非常相似,因此导电水凝胶有望成为人工皮肤类传感器的候选材料。Yang等利用有机水凝胶的集成特性,将还原氧化石墨烯(rGO)和GO纳米片嵌入由二甲基亚砜/HO二元溶剂辅助的多孔交联聚乙烯醇水凝胶网络中。得益于rGO/GO 的热响应特性,有机水凝胶还可以作为温度传感器。另外,水凝胶还具有压力和应变感应能力。压力/应变-电阻的响应机制可以通过填充的导电网络来解释。rGO 和GO 纳米片在有机水凝胶衬底中相互连接,构建了纳米填料之间电子传递的导电网络结构。在进行拉伸实验时,rGO 和GO 纳米片逐渐分离,破坏了最初的电子传递路径,增加了电阻。在受到压缩时,减少了相互连接的rGO 和GO 之间的间隙,并建立了更多的导电路径,水凝胶电阻减小。Zhang 等提出了一种多巴胺触发凝胶化(DTG)的策略,用于制造透明导电水凝胶[见图5(a)]。基本配方包括化学交联剂聚(乙二醇)二丙烯酸酯、甲基丙烯酸磺胺甜菜碱(SBMA)单体和多巴胺。其中,多巴胺作为聚合引发剂和动态交联介质合成水凝胶和调节其性能,而SBMA是一种生物相容性两性离子单体,而被用作导电单元。对于DTG 薄膜,因为温度会影响PSBMA 的正电荷和负电荷基团的迁移率,并进一步改变DTG水凝胶的离子电导率,因此产生温度响应。然后将其组装成DTG-介电质-DTG夹芯结构,制备了具有压电容响应的压力和应变传感器。Liu等构建了一个具有高压缩性、耐湿时间长、极端耐温性、抗菌和机械/热双重敏感性的多功能集成丝纤维蛋白-甘油/水二元溶剂(ST-GW)水凝胶传感器[见图5(b)]。PEDOT:PSS聚合物不仅具有导电性能和应变、应力感应能力,而且具有良好的热电效应,可以检测热刺激。

图5 具有压力/应力-应变-温度/湿度检测能力的材料设计[19,80-82,84]
超轻且可压缩的气凝胶材料,由于其具有高孔隙率、优异可压缩性和导电性,因此在柔性传感领域也具有广泛的研究。Zu等通过新型交联策略获得的高度灵活的多功能rGO/聚有机硅氧烷纳米复合气凝胶,所得的纳米复合气凝胶具有三层网络结构,由rGO 纳米片、聚乙烯基-聚(甲基硅氧烷)和聚(乙烯基甲基硅氧烷)彼此交联[见图5(c)];由于rGO具有出色的导电性和温度敏感电导率,所制备的传感器表现出温度、应变和压力传感功能。Qian等将CNF油墨和PDMS油墨分别打印在Ag/PET基底上,形成3D多孔结构的的正摩擦层和负摩擦层,构建基于纳米摩擦效应的多功能传感器。纳米多孔气凝胶结构可以显著提高结构的利用率,并有助于提升器件的接触面积、表面粗糙度和机械弹性,从而有助于改善摩擦电响应。该传感器可以有效地收集机械能来充当自供电机械传感器和湿度传感器。
此外,还有部分导电聚合物薄膜材料也表现出优异的多功能识别能力。Chen等通过在纸张表面引入中空聚苯胺微球(HPM)来开发具有多模式灵敏感应的功能化纸[见图5(d)]。其中HPM 是一种具有裂缝、孔洞和微隙分层结构的导电层,在弯曲应变时,裂纹、孔和微隙接触并分离,并引起可检测的电阻变化。基于聚苯胺的中空结构,传感器形成了可压缩弹性。按压功能化纸,球形聚苯胺被挤压成椭球形,导致HMP 层的裂缝、孔穴和微隙闭合,HMP 内部的紧密接触导致电阻降低。而湿度传感能力可以通过以下两个方面来解释:HPM 层中存在丰富的裂缝、缝隙、孔洞和中空结构,有利于水分子与聚苯胺链的接触;此外,水分子解离成质子(H)和羟基离子(OH),生成的H通过电子跃迁和离域促进聚苯胺链的掺杂水平。因此,随着湿度的增加,传感器的电阻明显降低。Sushmitha 等的研究中,采用基于2D-BiS(BS)结合PVDF/PPy 的纳米复合薄膜材料实现了可穿戴超灵敏压力、高可伸缩应变传感器和人体体温传感器的多功能结合[见图5(e)]。其中,PVDF是一种潜在的半晶体聚合物,具有优异的压电和热电性能;PPy是一种被广泛研究的导电聚合物,由于其合适的电子转移性能,BS具有优秀的热电性能。
水凝胶、气凝胶材料具有极好的拉伸-压缩性,是柔性基体的理想材料。另外,这些材料还具有极好的兼容性和集成性,易填充/负载气体导电材料、响应材料,是柔性基底的理想材料。为了降低多功能传感器结构的复杂性、简化制作方法,已有大量研究者以水凝胶和气凝胶材料为基础,开发出了具有三重感应功能的柔性传感器。同时此类传感器具有优异的传感灵敏度及稳定性,可有效应用于可佩戴传感器,可以实现人体运动状态、肢体受力、运动过程中的温度/湿度变化状态的同步检测及记录,这对部分疾病诊断及人体健康状态的评估具有重要的现实意义。
2.2 压力/应变-温度-湿度检测
可穿戴传感器可以通过对临床或实验室环境之外的健康状况进行持续监测,来实现许多疾病的诊断和治疗。压力()、温度()和湿度()是与人体及各种应用密切相关的关键物理参数,例如在分布式诊断、机器人技术、柔性传感器、功能性服装等方面。为了减少多功能系统的复杂性,降低此类传感器件的制造成本,如何实现在一个单一结构中同时及连续测量--是目前的主要研究方向。
湿度传感功能通常需要材料具有良好的亲水性和吸水性,因此多孔材料和水凝胶是最合适的柔性基体。此外,根据温度和湿度传感器的相关报道,碳基材料具有优异的多功能性,包括导电性、压阻性、热敏性和湿敏性。现有研究结果表明,炭黑、石墨烯及其衍生物和碳纳米管等碳材料被广泛应用于压力/应变-温度-湿度多功能传感器的制备中。
Yue 等开发了一种多功能、自供电、可生物降解、智能集成的多层纳米纳米纤维(NF)结构仿生多功能柔性传感器[见图6(a)],该传感器可同时检测人体压力、湿度和温度信号。制作的智能集成电子皮肤由四部分组成:第一层为压力感应层;第二层为温度传感层;第三层用于湿度检测;第四层采用摩擦电采集系统收集生物力学能量,并为温度和湿度传感提供能量。温度传感层以多壁碳纳米管和PEDOT:PSS 作为导电材料。湿度传感层以酸化碳纳米管为导电材料。Lin 等开发了一种具有自主自愈能力的双层多功能柔性传感器。它通过将各种碳材料,如炭黑、多壁碳纳米管和石墨与自修复黏合剂(纤维素纳米纤维CNF-PVA-水凝胶)浆料混合,从而在一个表面上制造各种功能单元(如电极、应变传感器、温度传感器和湿度传感器),这些器件同时表现出优异的传感性能和自愈能力。选用石墨烯(G)作为功能材料、温度传感器选择MWCNT作为功能材料制备应变传感器。而湿度传感器中,使用CB/G作为功能材料,采用湿-电极化过程,在CNF/PVA 薄膜上创建一个含氧基团的梯度。由浓度梯度驱动的氢离子扩散过程可以在电极之间产生电位差。电位差与极化的CNF/PVA 薄膜的含水量成正比,而CNF/PVA 薄膜的平衡含水量与环境湿度有关。制备的柔性自愈合柔性传感器还可以通过接口与传统电子器件相连接,通过蓝牙传输信号从而实现传感信号的可视化[见图6(c)]。Li等研究了一种集应变、温度和湿度传感于一体的超高性能多功能传感器。传感介质仅由碳纳米线圈和碳纳米管组成。将功能材料沉积在纤维素纸上,然后将功能性纸固定在柔性聚合物PDMS 基体上,得到传感器。多功能传感器可以同时检测应变、温度和湿度的刺激且耦合率低[见图6(d)];可以准确检测多种人体应用,如人体运动、呼吸行为、脉搏波等。

图6 具有压力/应变-温度-湿度检测能力的三模式传感器[87-90]
此外,基于离子导电的多元复合物,温度和湿度均会影响离子的迁移率,可用于湿度-温度多功能传感器的设计。Han等报道了一种基于新型机械强度纳米纤维/有机混合离子-电子的导电气凝胶(MIECs)。其中,导电聚合物PEDOT 提供电子热电压,离子导电聚合物PSS 提供离子热电压峰值。当对传感器施加压力时,作用力使弹性气凝胶的厚度和体积发生变化,从而导致导电膜的电阻随施加压力的变化而发生变化。当传感器的一端与温度不同的物体直接接触时,可以利用热电效应测量传感器与物体体积之间的温差,在高湿度条件下(RH≥60%),传感器产生的热电压不仅包括电子热电压,而且还包括离子热电压。观察到的热电压峰值演化源于PEDOT:PSS 相内离子的热扩散,其大小直接与环境湿度有关。以此得到的传感器中,压力以电阻变化(线性斜率)的形式读出、温度以稳定的热电压(电压阈值)的形式读出、湿度以热电压峰值(动态)的形式读出[见图6(b)]。由此产生的多参数--传感器可以测量三个物理参数,且不会产生严重串扰。Gao 等将含羧基和氨基的两性离子明胶和含壳聚糖混合,并加入甘油和氯化钠,制备了CGGN 有机水凝胶膜。由于明胶、壳聚糖、甘油之间的多种物理相互作用(包括静电相互作用、氢键),制备的CGGN有机水凝胶膜表现出优异的力学性能和应变感应能力。同时,壳聚糖和明胶中含有大量的亲水基团,如羧基、氨基、羟基等。这些亲水官能团和吸湿性甘油与空气中的水分子形成氢键,可促进水分子在CGGN有机水凝胶膜中的吸附、聚集和保存。因此在湿度条件下,CGGN有机水凝胶膜的水含量增加,钠离子和氯离子迁移速率加快,使CGGN有机水凝胶膜的电阻减小。而温度敏感性的原因是明胶能够在40℃左右解开缠结的肽链,在冷却过程中,链段重新缠结。
以上研究为可佩戴传感器实现压力/应变-温度-湿度的连续监测提供了新的解决途径,这对未来人体的疾病诊治、健康监测有重要意义。然而随着传感模式的增加,仅靠单一传感机制必然造成不同传感信号之间的重叠及干扰,如何在一个传感器中实现多刺激的感应和区分一直是目前的技术瓶颈,通过结构设计在同一传感器中构造不同的传感单元是最简单、有效的解决方法之一,但必然会使得多功能传感器的结构复杂化,设计一种可实现对不同刺激表现出不同传感机制的多功能响应材料,是降低传感器复杂性的新途径。这是未来多功传感器的研究重点。
2.3 压力/应变-温度-其他信号监测
模仿人体皮肤的监测感应能力所获得的柔性多功能传感器可以为截肢患者提供更真实的触觉感受。实际上,现有的人造电子皮肤传感器已完全超越了人体皮肤的感知能力,除常规的压力/应变、温度感知外,还可实现对微弱气体、pH 及葡萄糖等刺激的感知。
例如,Chen等通过静电纺丝技术,将离子液体/热塑性聚氨酯离子凝胶纳米纤维制成纤维薄膜[见图7(a)]。研究者将所得纤维薄膜切成矩形试样,沿垂直于纳米纤维取向的方向加载电极,以设计基于离子传导机制的压力-温度-气体传感器。随着温度的升高,离子的迁移率加速,因此传感器具有高灵敏温度感应能力。另外传感器还具有超高灵敏度的压力感应能力,可以感应到由于气体作用产生的微弱压力和温度差,因此可以用于气体强度检测。Zhao 等将沉积在柔性聚酰亚胺衬底上的热敏铂(Pt)薄膜用于模拟人体皮肤上的多个传感器。Pt薄膜被设计成多个条带形成阵列,并配置了多感知的传感元件[见图7(b)]。柔性传感器整合了感知机械和热刺激、区分物质类型和感知风的多种感知能力。先将Pt元件电加热到一个适当的、较高的温度(模拟人体皮肤的温度),当被加热的Pt元件接触到其他物质时,由于传导热的作用,热敏元件的温度对该物质的导热性作出响应,这就提供了一种判别物质的能力。风感应是由依赖于风流的对流热流引起的加热铂元素的温度变化来实现的。压力传感是通过将加热的弹性体覆盖多孔弹性体来实现的,弹性体膜的热导率与外界压力刺激引起的弹性变形有关。Khatib等报道了一种在环境或水下具有温度、压力和pH 水平高感知的柔性传感器。整体设计为多板块模式[见图7(c)]。将Ag NWs用于温度传感器是基于热阻效应,由于热引入的载流子散射(电阻增加)或热增强的电荷传输(电阻降低),导电材料的电阻随温度而变化。在压力传感方面,使用了一个基于PPGPUU和CB复合材料的电阻式传感器。压力的施加会导致导电填料之间的距离增加,从而增加电阻。另外,pH变化导致碳纳米管电学性能的变化,从而该传感器具有pH感应。
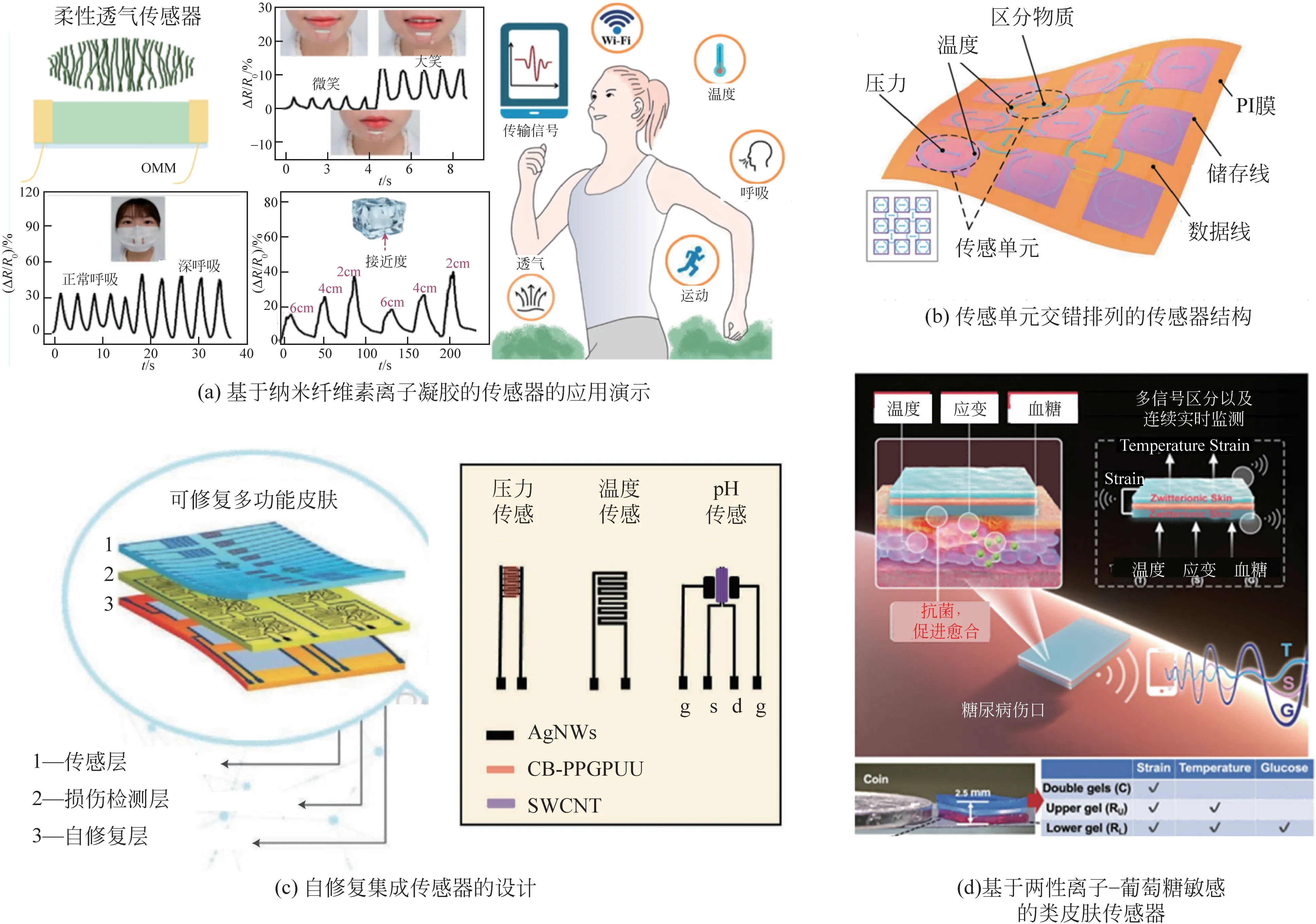
图7 具有压力/应变-温度-其他信号监测能力的三模式传感器[92-95]
在人造电子/离子皮肤中,由于不可避免地相互信号干扰,在单个传感单元中区分多刺激响应是具有挑战性的。Guo 等设计了一种两性离子皮肤传感器,其可以实时连续监测和区分三刺激响应信息[见图7(d)],这种夹心结构的传感器系统基于两性离子-葡萄糖敏感的皮肤状水凝胶,其上下层中间有隔离弹性体层,能够在没有信号干扰的情况下监测和区分压力、温度、葡萄糖浓度三个信号,以及促进糖尿病创面的愈合。
以上研究结果表明,柔性多功能传感器的传感模式已经不仅仅限于实现常规的压力/应变、温度、湿度传感,想要实现或超越人体皮肤的感知能力,必然要增加更多的感应模式。这对未来的医疗健康、人机交互、仿生机器人的发展具有重要的研究意义。
3 多模式传感器
除了各种触觉感知能力,如应变、压力、温度和湿度感知功能外,人工柔性传感器还可以通过集成触觉传感器以外的传感器,如化学传感器、光传感器、磁阻传感器等,实现更多的传感功能。这为制造超越天然皮肤感知功能的柔性传感器提供了可能性。要实现传感器的多功能并降低传感器的复杂性,柔性基体和功能材料的选择都非常重要。特别是碳系材料,现有研究证实其具有优异的传感性能。
基于碳功能材料的应变、压力、温度和湿度四功能传感器已被成功开发。例如,He 等通过一种简单的制造工艺开发了一种MXene-纤维素纳米晶体-罗望子胶-聚丙烯酰胺离子导电水凝胶。在水凝胶中分散MXene并加入Al和Cl,实现了水凝胶传感器对应变、压力、湿度和温度的多重感知[见图8(a)]。Liu等开发了一种基于纸张的柔性多模式传感器,仅用一个设备即可同时检测应变、湿度、温度和压力[见图8(b)]。该传感器是通过将CB和rGO混合物喷涂在纸基板上的方法获得,通过扫描电子显微镜可发现,CB 颗粒被rGO 吸收,然后重叠在纸上形成分层敏感层,这赋予了传感器检测各种刺激的能力。此外,该传感器在水中易降解,经浸泡和干燥后还可重复使用。另外,四功能传感器还有Xu 等提出的一种多模式比色仿生传感器——PEDOT:PSS、Ag NWs 电子转移层和混合有热致变色分子的硅橡胶基板组成[见图8(c)]。制造的仿皮传感器可以检测多种刺激(包括压力、应变、电压和温度),而这四种人工重构的传感模式对应于设备电极的不同组合;需要指出,其中的热致变色温度传感器是基于光学式传感器设计的。
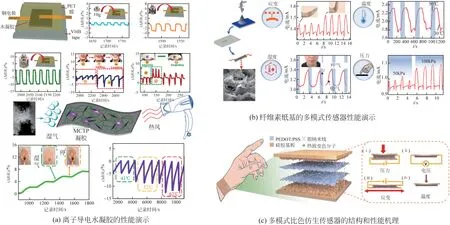
图8 具有四种以上传感模式的柔性传感器[99-101]
此外,碳材料通过有效的表面改性,最突出的表现就是具有化学气体感应功能。Lu 等采用静电纺丝纤维毡工艺和超声装饰法制备了一种柔性、超轻、高导电性的石墨纳米片/聚酰胺纳米纤维复合材料多功能传感器。该传感器对应力-应变、温度和气体传感提供了出色的多功能响应。并且,甲酸、,-二甲基甲酰胺(DMF)和NH的极性化学蒸气无论柔性传感器的物理状态(平坦、折叠、扭曲和打结),都可以准确检测。Zhang 等将聚多巴胺表面改性的rGO 作为功能材料,制备导电墨水,然后基于导电墨水设计了一个巧妙的折纸层次传感器阵列(OHSA),折纸作为一个可控的层次框架,使得该OHSA具有独特的时空分辨、高分辨模式识别特性。该智能传感设备,可以同时感知和区分复杂的物理和化学刺激,包括温度、相对湿度、光和化学气体(挥发性有机物)。
以上这些模拟人类皮肤所设计的多功能电子皮肤传感器,已超过了人体皮肤的感知能力,同时结合现代科学技术,使得此类传感器还具有轻便、易佩戴的特点,可实现与人体皮肤的完美对接与结合。另外,随着感应功能的增多,结构设计只会增加传感器的复杂性,而以单一结构制备多功能传感器的研究相对更多,此类传感器中,功能材料的选择非常重要。可用于柔性传感器的功能材料如表2 所示,碳材料是最具发展潜力的传感材料,可以实现包括压力、应变、温度、湿度、pH 及化学气体在内的所有功能。这主要得益于其优异的电学性能、机械性能、多样性以及易功能化改性的特点。此外,为了实现多功能传感灵敏性和稳定性,选择多种功能材料构建协同效应是最有效的方法。

表2 传感功能材料性能总结
4 结语
柔性电子技术近年来取得了巨大突破,特别是应用于人体健康监测的柔性电化学传感器正朝着功能多样化、结构简单化、性能灵敏稳定的方向发展。目前已开发出大量具有两种及以上的识别模式的柔性传感器,这对未来开发更轻便的可穿戴人工智能设备具有重要意义。本文通过对现有多模式柔性传感器的研究进展进行分析,得出如下结论和展望。
(1)结构设计是实现传感器多功能化的基本途径。通过将具有不同模式的柔性传感材料垂直或分区结合在同一传感器中,这种方法通常较易操作,且不同传感信号间的影响较小。但是想要实现更多功能的集合,则会导致复合传感器的结构过于复杂、难以实现轻量化,因此更多被用于双模式传感器的设计中。
(2)为了降低多模式传感器的复杂性,现已开发出大量具有多种刺激反应的先进功能材料。其中包括以水凝胶、气凝胶、弹性聚合物为柔性基体的复合材料,这类材料具有良好的柔韧性,可以负载各种功能材料(如导电材料、热敏材料、湿敏材料和气敏材料等),集合各自功能材料的传感性。此类先进功能复合材料是未来多功能传感的重要研究方向。
(3)碳系材料,主要指石墨烯及其衍生物、炭黑、碳纳米管和碳化物(如MXenes)等,具有很好的电学特性、机械性能、热稳定性及低毒性的特点,与金属材料相比,更易获得、成本更低,因此在可穿戴柔性电子领域具有广阔的应用前景。同时,现有研究表明碳系材料可同时感知多种刺激,已开发出部分以碳材料为主体的柔性多功能传感器。然而,碳材料的多功能性还有待深度挖掘。
(4)随着传感模式的增加,器件面临着越来越多的问题,如制造成本的上升、制造过程的复杂和不同信号之间的严重串扰,特别是如何在不受干扰的情况下同时识别多个不同的刺激。这是目前急需解决的技术瓶颈。
(5)现有传感器的大多性能均处于实验室环境中测试,特别是温度、湿度信号的监测。然而可穿戴设备实际应用所处环境复杂,需降低环境刺激对传感器感应及稳定性的影响,增添传感器的耐水性、耐高/低温性,才能更便于实际应用。
