基于RCNN的双极化气象雷达天气信号检测
2022-10-29高涌荇王旭东朱岱寅孟凡旺
高涌荇, 王旭东,*, 汪 玲, 朱岱寅, 郭 军, 孟凡旺
(1. 南京航空航天大学雷达成像与微波光子技术教育部重点实验室, 江苏 南京 210016;2. 中国航空工业集团公司雷华电子技术研究所, 江苏 无锡 214063)
0 引 言
气象雷达在灾害性天气探测、降雨量估计等领域扮演着不可或缺的作用。早期的多普勒气象雷达仅发射和接收单一方向的回波信息,可得到反射率因子、谱宽、多普勒速度等信息。双极化气象雷达可以发射和接收水平和垂直方向上的电磁波,因此可得到水平反射率因子、差分反射率、相关系数、差分相位、差分相移率等额外的极化参数。这些极化参数反映了气象云团中降水粒子的形状、尺寸、大小、相态以及空间取向等信息,促进了定量估计降水和云中水凝物粒子相态识别的发展。
当雷达工作在低仰角扫描模式时,雷达天线的主瓣或旁瓣照射到地面上的物体时会接收到地面物体的回波信息,因此近地点受到地杂波污染极其严重。尽管在极化参数计算时会对地杂波进行抑制,但抑制性能受限于系统热噪声、门限值的选取等不确定因素,因此抑制后的回波中仍残留部分地杂波。其次,混杂在回波信号中的昆虫、飞鸟等生物杂波也将影响雷达观测资料的数据质量。
近年来,国内外对于天气信号检测主要集中在地杂波滤波算法方面。Moszkowicz等人提出用贝叶斯分类器检测地杂波与天气信号,通过假设输入测量值的条件概率为高斯分布,得到判别函数来检测天气信号。Rico-Ramirez等人提出了一种新的纹理函数计算方法来消除降水区域的边界效应,以此区分地杂波与天气信号。Cao等人和Li等人提出了用4个判别函数对天气信号检测的频谱杂波识别算法。Wang提出了一种深度学习方法识别降水云,将天气信号分为层状云或对流云两种。Golbon-Haghighi等人分别利用相位起伏指数(phase fluctuation index, PFI)和相位结构函数(phase structure function, PSF)来检测天气信号。Gauthreaux等人利用气象雷达专门研究昆虫与鸟类的迁徙,由随机森林算法将气象雷达回波分类为天气信号以及7类生物。
卷积神经网络(convolutional neural network, CNN)在目标检测和图像识别领域已经被证实是一种稳健而有效的方法。Wang等人开发了一种CNN与模糊逻辑算法相结合的水凝物粒子相态识别方法,其在降雪、降雨、冰雹的识别上表现出了良好的性能。Lu等人开发并优化了5种经典的CNN利用双极化气象雷达数据识别了4种水凝物粒子相态,提供一种稳健且准确的方法。Han等人实现了利用CNN对于对流风暴的探测与即时预报。Ran等人根据雷达数据的分布形态,提出了一种基于faster残差卷积神经网络(faster residual CNN, faster-RCNN)的降水云识别新方法,得到了可靠的识别结果。
本文根据WSR-88D双极化气象雷达观测资料,通过对天气信号特征的研究,提出了基于RCNN天气信号检测方法。该方法首先将双极化气象雷达极化参数堆叠为三维矩阵后通过数据预处理将其分为天气信号与杂波信号。然后,开发并优化了一种RCNN对天气信号进行检测,并对比了支持向量机(support vector machine, SVM)、经典CNN等方法的检测效果。最后,通过多次实测数据,验证了所提方法在不同仰角、不同时刻对天气信号的检测效果。
1 数据模型
本文中所用到的雷达观测资料为美国俄克拉荷马州KTLX双极化气象雷达的观测资料,其雷达主要工作模式如图1所示。
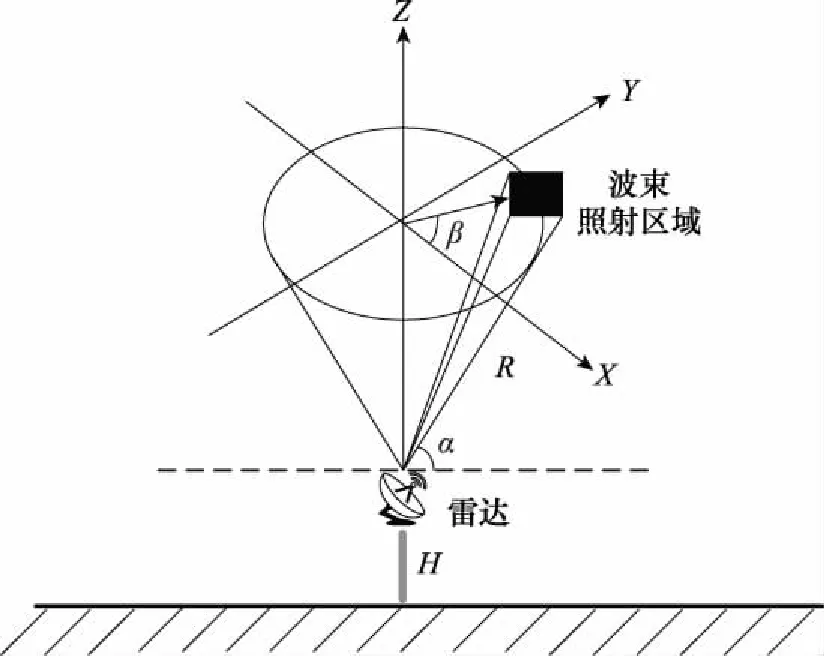
图1 雷达工作模式Fig.1 Radar operating mode
双极化气象雷达架设高度固定为,以平面位置指示扫描方式,通过不同仰角,进行全方位扫描,便可获得三维空间降水信息,其中为方位角,为雷达照射距离。
双极化气象雷达可以同时或交替发射水平和垂直极化波,由于电磁波在空间传播时介质的非均匀分布,不同极化信号的衰减和相移会不同,因此可以计算出两种极化波的衰减差和相移差,由此便可计算得出极化参数,以下将具体介绍双极化气象雷达主要的极化参数。
1.1 水平和垂直反射率因子
反射率因子的大小通常与降水粒子的直径大小相关,并且不同类型的降水粒子其介电常数也对反射率因子有不同影响。当双极化气象雷达发射水平极化波时,水平反射率因子定义为
(1)

(2)
式中:为垂直极化入射波照射到降水粒子产生的垂直极化散射场的散射系数。
1.2 差分反射率因子
差分反射率因子为水平和垂直反射率因子的比值,定义为
(3)
式中:的大小反映了降水粒子的空间取向和尺寸大小。小雨滴的大小接近零;大滴在下降时偏扁,因此较大;小冰雹由于其下降时随机翻滚,接近零;而大冰雹主要为垂直尺寸,通常小于零。
1.3 零延迟相关系数
零延迟相关系数由雷达接收到的水平和垂直极化波的零延迟互相关系数的幅度定义,其表达式为
(4)
式中:(0)体现了水平和垂直极化波后向散射特性的相关性。通常,由于地杂波与生物杂波等目标会导致脉冲之间的行为完全不同,因此杂波的相关系数通常小于09甚至更小,而天气信号的相关系数通常在095以上。
1.4 差分相移及差分相移率
差分相移定义为水平和垂直极化波之间的双程相位差,其表达式为
=-
(5)
式中:、分别为雷达发射水平和垂直极化波时所产生的双程相位。
差分相移率具有不受电磁波部分遮挡和雷达定标的优势,由于不是双极化气象雷达的直接测量参数,通常使用的定义对其进行重构,其重构公式为

(6)
式中:、分别代表雷达径向上两个距离库与雷达之间的距离(>)。
2 基于RCNN的天气信号检测
本文采用RCNN检测天气信号与杂波信号,并制作大量由天气信号与杂波信号组成的数据集对所提出网络进行训练和测试,以提高其准确性。
RCNN可以在复杂度不变的情况下加深网络层数,提高网络的分类准确率,自动提取层次化的特征,并以端到端的方式完成分类,提供一个鲁棒性和准确性高的分类结果。其避免了传统分类算法中复杂的特征提取和数据重构对原始数据带来的破坏,并且通过池化,可以对原始数据进行采样压缩,降低计算复杂度。因此,RCNN已经成为图像识别和语音识别等许多领域的重要研究工具。本节将具体给出数据集制作方法以及所提出的RCNN网络结构。
2.1 数据集制作
双极化气象雷达观测资料虽然不是图像数据,但是在不失通用性的情况下可以将多个极化参数类比为图像的红绿蓝通道,每个通道存储一个极化参数的二维矩阵数据。因此,将4个极化参数矩阵进行堆叠可构造成三维数据阵列,其大小为4×方位向×距离向。
不同于普通图像识别,雷达回波数据中不仅包含天气信号,而且还包含杂波信号,以及部分缺失数据和大量无效值,这都将影响所产生数据集的质量。因此,本文将所堆叠的三维矩阵块分割为若干个大小为4×KL×KL小矩阵块,将每个矩阵块标记为天气信号或杂波信号。在标记数据时,考虑到气象雷达回波数据的稀疏性,一个矩阵块中可能有缺失值或无效值,因此,本文采用滤波器将数据中有效像素点个数小于百分之二十矩阵块舍弃;并且由于气象回波的特殊性,分割所得到的矩阵块中可能既含有天气信号又含有杂波信号,为了保证数据集包含尽可能少的噪声,本文将占比达到百分之五十以上的类别作为矩阵块的标签,且矩阵中心点类别必须为标签类别。这样,既能保证所制作数据集的质量,又可以将尽可能多的回波信息包含进来,具体实施流程如图2所示。
图2 数据集制作流程图Fig.2 Flowchart of datasets making
2.2 残差网络
由于本文所制作的数据集中张量尺寸较小,为解决在加深网络层数时所造成的梯度消失问题,本文选取残差网络模块(residual network module, RNM)来解决反向传播时所造成的梯度消失问题。如图3所示,输入的张量分成了相同的两部分,一部分经过两个卷积层后得到输出()与另一部分相加后输出残差模块的结果()。因此,相比于CNN,残差网络并没有引入额外的参数。残差网络的结构定义为

图3 基本RNMFig.3 Basic RNM
=()+
(7)
式中:为各层的输入;为输出;和为各卷积层的权值,为线性整流函数(rectified linear unit, ReLU),其定义为
(8)
其中, ReLU的功能如下:当输入值大于等于零时,输出值等于输入值;当输入值小于零时,输出为零。
2.3 RCNN结构
本文提出的基于RCNN的天气信号检测算法是一种典型的有监督学习算法,需要依靠大量带有标签的数据来训练模型。本文利用Python+Pytorch开发平台,构建了基于RCNN的天气信号检测模型。由输入输出、卷积层、批标准化层(batch normalization, BN)、RNM1~8、ReLU层、全连接层、分类标签和捷径连接组成。图4为本文使用的基本RNM,当卷积层的通道数发生变化时,捷径连接通过卷积核大小为1×1的卷积层和BN改变通道数与RNM输出的卷积通道数相匹配。

图4 基本RNMFig.4 Basic RNM
图4中,Conv表示卷积层,表示卷积核的个数,表示填充大小。
图5为本文所提出的RCNN网络。

图5 RCNN结构框图Fig.5 Structure diagram of RCNN
如图所示,网络主要由输入输出层,一层卷积层、4个残差模块、一层全连接层和一个Softmax分类器构成。在输入层输入由、、、构成的大小为4×15×15的三维矩阵,经过卷积层、4个残差模块后经平均池化,得到128个大小为1×1的特征向量。最后,用Softmax分类器进行分类。网络具体参数如下所示,其中,@(×),表示卷积核个数,表示卷积核大小。

输入 分割的极化参数矩阵(维度:4×15×15)RCNN的各层卷积核大小输入层 4×15×15卷积层 16@(3×3) RNM1 16@(1×1)16@(3×3)16@(1×1)RNM2 16@(1×1)16@(3×3)16@(1×1)捷径连接卷积层1 32@(1×1)RNM3 32@(1×1)32@(3×3)32@(1×1)RNM4 32@(1×1)32@(3×3)32@(1×1)捷径连接卷积层2 64@(1×1)RNM5 64@(1×1)64@(3×3)64@(1×1)RNM6 64@(1×1)64@(3×3)64@(1×1)捷径连接卷积层3 128@(1×1)RNM7 128@(1×1)128@(3×3)128@(1×1)RNM8 128@(1×1)128@(3×3)128@(1×1)全连接 2×1输出 特征向量(维度2×1)
2.4 RCNN天气信号检测算法
本文提出了双极化气象雷达天气信号检测算法,以双极化气象雷达原始极化数据作为输入,将各极化参数堆叠为三维矩阵后进行数据集制作,并基于所提出的RCNN对天气信号检测,得到检测后的天气信号和杂波信号。由于训练模型需要大量带标签数据对模型进行训练验证,因此在利用第2.1节所述方法中,本文选取了2018年KTLX雷达观测资料中具有典型天气信号特征的数据,通过制作的数据集对所提出的RCNN网络进行训练和测试,来提高模型对天气信号检测的性能。
3 实验结果及分析
3.1 实验配置
实验中CPU采用Intel Core i7-10700k, GPU采用NVIDIA Geforce 2080Ti。本文对所提出的RCNN采用随机梯度下降方法进行训练,设置批次大小为128,采用带动量的梯度下降法来训练模型,其中动量因子为0.9,学习率为0.05,训练迭代次数200次。
实验中选取2019~2020年俄克拉荷马州S波段KTLX双极化气象雷达平台采集的观测资料,对所提出的算法进行评估。
为了评估算法检测性能,引入准确率acc以及检测概率和虚警概率,其定义为
(9)
(10)

(11)
式中:TP表示将天气信号正确识别;FN为将天气信号误判为杂波信号;FP为将杂波信号误判为天气信号;TN表示杂波信号正确识别。
3.2 算法性能测试
本文主要从以下几个方面对算法的性能进行测试,以验证基于RCNN的天气信号检测方法的有效性。实验1对比不同训练率下本文所提出的RCNN检测准确率以及CNN、SVM等方法的检测准确率。实验2选取一次实际雷达观测资料对不同方法的检测效果进行评估。实验3测试了RCNN对不同仰角实测数据的检测效果。实验4分析了模型对2020年不同月份天气信号的检测性能。
对比RCNN、CNN、SVM对天气信号的检测效率
为了验证算法的有效性,首先从制作的数据集中等量选取天气信号与杂波信号,以训练率为2%、4%、6%、8%来分别训练RCNN,并将其按80%、10%、10%分成训练集、验证集以及测试集来训练模型。本文均使用8%的训练率对SVM分类器以及优化后的CNN网络进行比较,其测试准确率变化如图6所示。
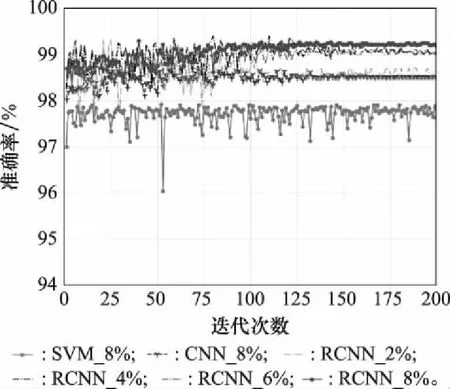
图6 SVM、CNN、RCNN准确率随迭代次数的变化Fig.6 Accuracy of SVM, CNN, and RCNN with the number of iterations
通过比较可以看出,随着迭代次数的不断增加,图6中训练率为8%的RCNN准确率最高,逐渐稳定在99.22%左右,而图中训练率为8%的CNN的准确率稳定在98.52%、训练率为8%的SVM准确率稳定在97.61%。可以看出,RCNN仅用2%的训练率就可以达到CNN与SVM训练率为8%时的准确率,这说明本文所设计的RCNN可以更好地提取极化参数中所含天气信号的特征,在检测准确率上表现出了较大优势。RCNN的优势在于模型中含有捷径连接,可加深网络层数,实现梯度信息向深层传递,从而抑制梯度消失,提高检测准确率。各模型其最终检测准确率如表2所示。

表2 不同方法检测准确率对比Table 2 Detection accuracy comparison of different methods
对比表2中不同方法的准确率可看出,随着训练率的增加,RCNN检测准确率不断提高,当训练率为8%时,准确率最高,达到了99.22%,此时测试集的虚警概率为=0.012 5,而检测概率为=0.996 2,进一步体现了模型的性能。
各方法在实测数据上性能对比
为了验证模型在实测数据上的性能,本文选取了2019年5月1日0时2分KTLX雷达实测的一次降雨过程对模型进行测试。图7(a)~图7(d)分别显示了大小为360×600反射率因子图、差分反射率图、相关系数图、差分相移率图。
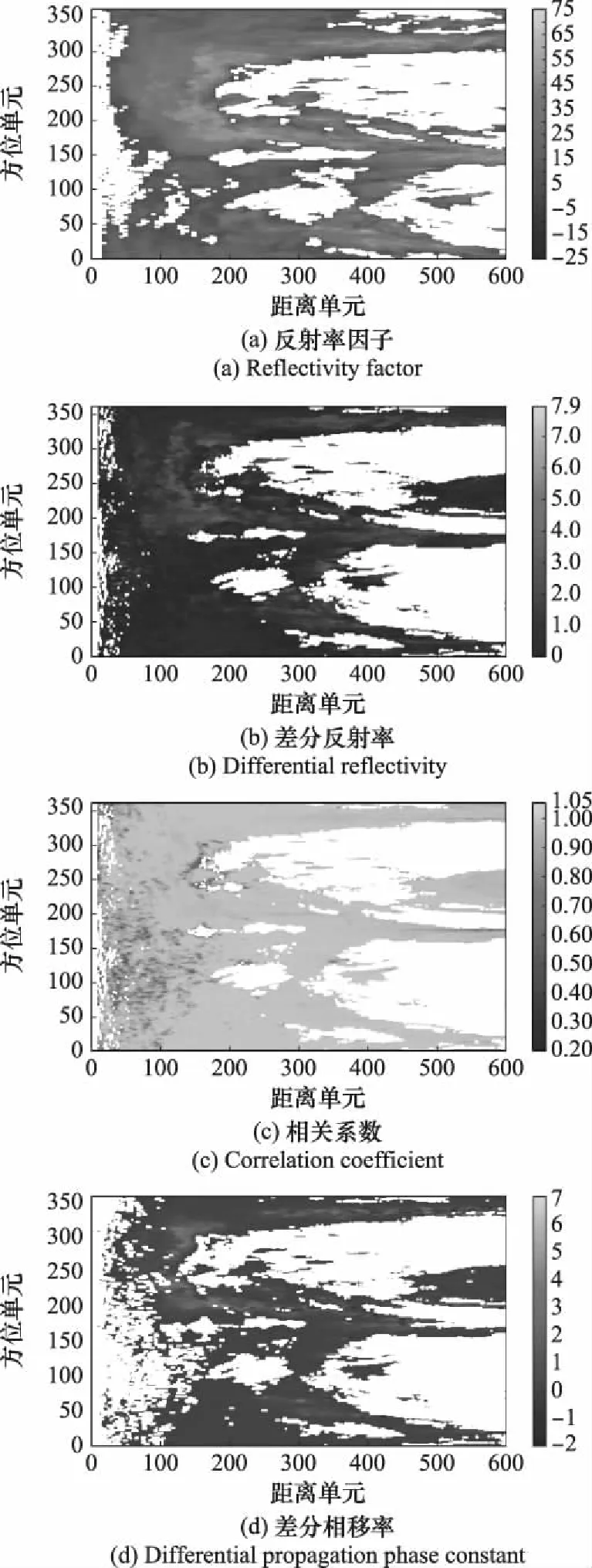
图7 4个极化参数图Fig.7 Four polarization variable diagrams
图8(a)~图8(e)分别为SVM、CNN、训练率为2%、4%、6%、8%的RCNN检测结果。从图8(a)中所标注的黑色矩形框中可明显看出,SVM方法将明显的天气信号误判为杂波信号;对比图8(b)和图8(f),CNN方法在天气信号与杂波信号的交界处,当天气信号与杂波信号相互掺杂时,在黑色矩形和圆圈处有着明显误判,这说明RCNN方法对于杂波信号与天气信号交界处的检测效果更佳;对比图8(c)~图8(f)可以看出,随着训练率的增加,RCNN模型检测准确率不断提高,检测效果逐渐趋于最优。因此,将RCNN作为天气信号的检测方法是较好的选择。
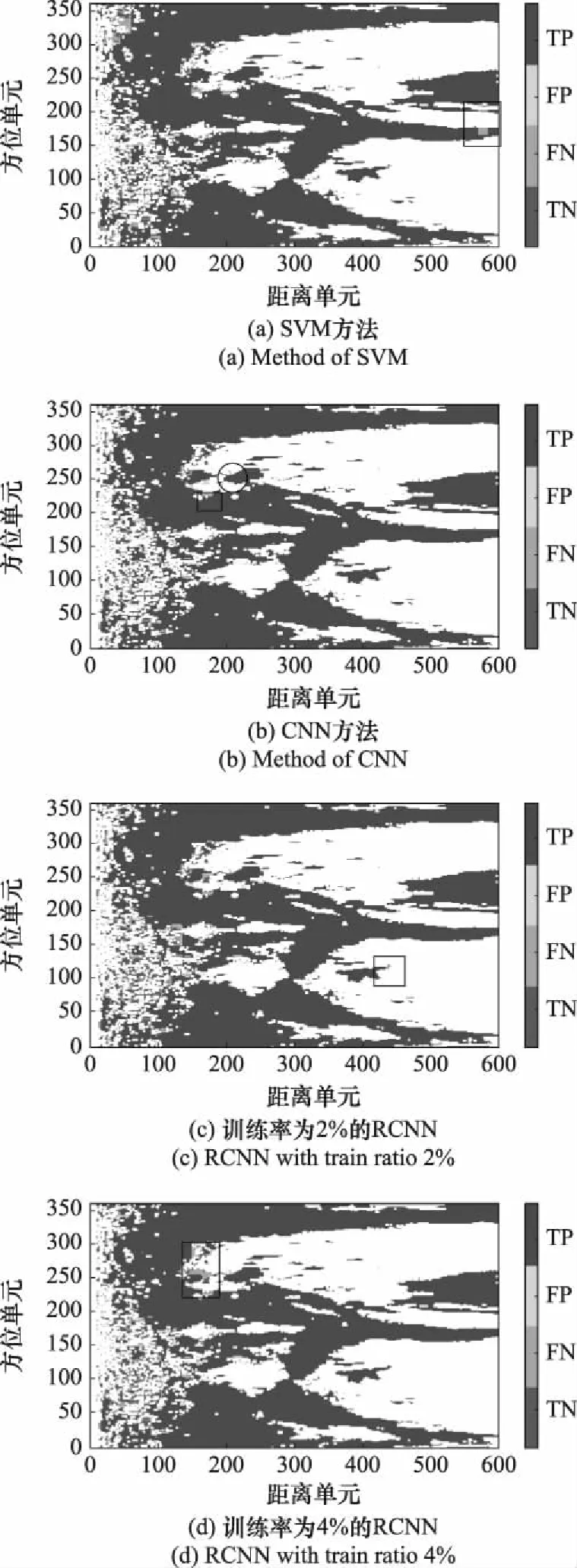
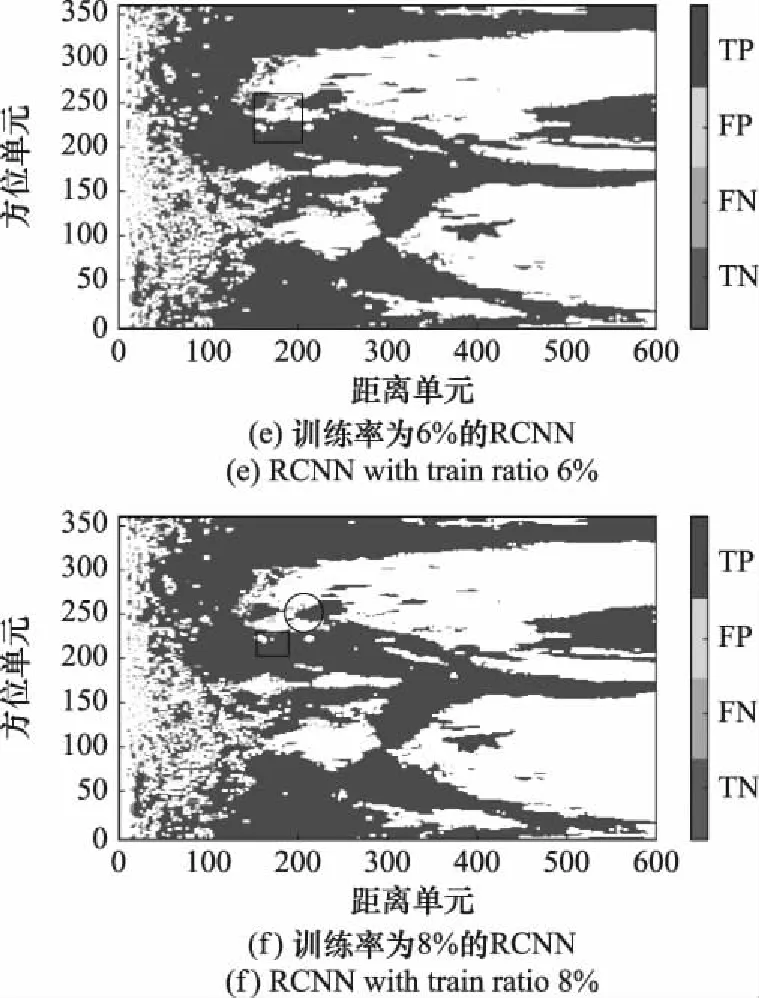
图8 不同方法实测数据检测效果Fig.8 Detection effect of measured data of different methods
RCNN模型对不同仰角数据检测性能对比
本文利用所提出的算法对于2020年1月10日13时55分仰角分别为0.5°、1.5°、2.4°、3.4°的数据进行测试,图9显示了具体的测试结果。在测试时,本文首先将不同方位的数据转换为同一方位单元以便于比较。虽然在制作数据集时仅选取0.5°仰角的数据对模型进行训练和测试,但从图9可以看出,RCNN模型对于其余仰角的实测数据均有良好的检测效果。并且,可以明显看出,随着仰角的增加,杂波信号不断减小,这也进一步印证了本文所提出的RCNN天气信号检测算法在低仰角数据的可行性及必要性。

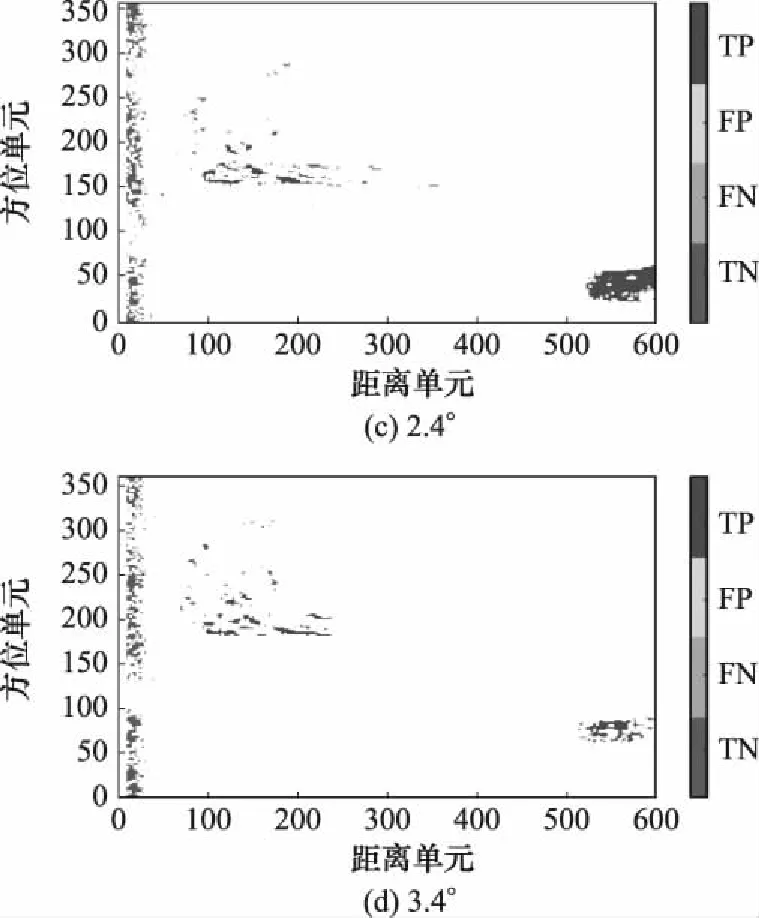
图9 不同仰角测试结果Fig.9 Test results of different elevation angles
RCNN模型对2020年不同月份数据检测效果
为了验证模型在新的雷达观测资料上的性能,本文利用训练好的RCNN模型分别选取2020年每个月份气象信息最为强烈的观测数据进行测试,结果如图10所示。
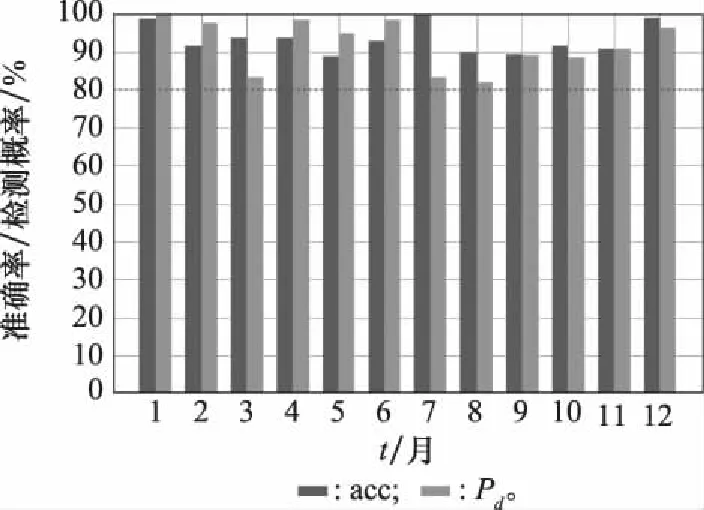
图10 2020年不同月份测试结果Fig.10 Results of different months in 2020
尽管本文在制作数据集时所选取的数据仅为KTLX雷达2018年的观测资料,但是所训练模型在2020年不同月份新的时间段内也展现出了良好的检测性能,不论是acc还是均有一个较高水平。但由于7~10月是当地昆虫鸟类大量活跃的季节,模型对当月数据的检测概率低于90%。总的来说,RCNN模型在新的时间段上表现出了良好的检测性能,可很好地从双极化气象雷达回波中将天气信号检测出来。
4 结 论
本文提出了基于RCNN的双极化气象雷达回波天气信号检测算法用来检测天气信号,使用4个双极化气象雷达的极化参数制作数据集并训练所提出的RCNN网络模型。实验结果表明,与SVM、CNN等方法相比,本文所提出的RCNN方法对于天气信号的识别准确率更高,在杂波和天气信号的交界处表现出了更优的性能。并且算法在不同仰角以及2020全年的实测数据上均表现出了良好的检测性能。但是,在分割极化参数制作数据集时破坏了原始数据结构和相关性,可能会导致部分极化信息丢失,后续工作将研究如何更好地分割气象单元,保留原始极化信息。
