一种改进Canny算子的尾喷口图像边缘检测算法
2022-10-28孙延鹏常占友陈新禹
孙延鹏,常占友,陈新禹,王 鹏
(1.沈阳航空航天大学,沈阳 110136;2.中国航发四川燃气涡轮研究院,成都 610500)
1 引言
在光学测量中,能够稳定、高精度地提取尾喷口的喷口边界、可调鳞片等特征边缘,可以减少数据的复杂度以及保留重要细节,这对于提高标定精度和测量精度具有非常重要的意义。但在尾喷口特征边缘提取过程中,存在以下几个难点:第一,发动机尾喷口测量是军工科研的重要部分[1],基于保密等原因,世界各国都不公开相关研究成果和资料,可利用的尾喷口测试图像很少;第二,图像易受到光照不均匀、环境光干扰等问题的影响,使得图像存在灰度信息丢失、部分信息被遮挡、图像亮斑等问题,对发动机尾喷口图像边缘检测造成影响;第三,尾喷口特征对象的喷口边界、可调鳞片等特征细节较多,容易受到噪声的干扰。为此,非常有必要对发动机尾喷口图像的边缘进行检测。
传统边缘检测算子有Sobel、Roberts、Canny、LOG 等,但这些算子存在对噪声敏感、边缘不连续等现象[2]。相比较而言,Canny算子具有良好的信噪比和检测精度而被广泛应用。但Canny算子存在高斯不加区分的模糊图像,阈值选择具有不适应性,为此众多学者对Canny 算子进行了改进。Bustacara-Medina 等[3]提出了对传统Canny 算子的优化,在非最大抑制步骤(NMS)中添加曲率信息以获得准确的边缘。张洪等[4]针对密封圈尺寸规格繁多、微弱毛刺较难检测的特点,提出一种改进的Canny 边缘检测来提高轮廓检测定位精度。任贵粉等[5]利用剪切波与Canny 算子相结合的改进新算法,对红外故障图像进行边缘提取,消除了传统Canny 算子在检测时出现的伪边缘现象。Bugarinović等[6]通过消除Canny算子处理的数据中不必要的边缘像素来加快过程,以使这些数据通过检测算法,有效地提高了计算效率。Xu 等[7]经过Canny 算子处理后,使用形态学开口对二值图像进行腐蚀和扩张,并去除多余的边缘信息获得了完整的图像。Lin等[8]提出了一种使用改进的最小生成树算法和改进的Canny算子边缘检测器的算法,来分割包含大量噪声的图像。
为了稳定、高精度地提取尾喷口可调部件的边缘,以提高标定精度和测量精度,本文提出了一种改进Canny 算子的发动机尾喷口图像边缘检测算法。该方法对传统Canny算子边缘检测中高斯滤波不加区分的模糊进行改进,在保留图像边缘的同时还可对噪声进行模糊;对传统需要人为设定Canny 算子阈值进行改进,通过Otsu(最大类间方差法)自适应阈值算法获取图像低阈值,采用迭代最优算法求取图像高阈值;对图像采用八方向的Sobel算子进行图像增强,以提高图像的可视性。
2 传统Canny算子边缘检测算法
2.1 传统Canny算子评估准则
图像的边缘检测一般包括滤波、增强、检测和定位4 个步骤,其设计流程见图1。Canny 算子也遵循这一流程。对Canny算子进行评估应把握三个基本准则,即信噪比准则、定位精度准则和单边缘响应准则[9]。
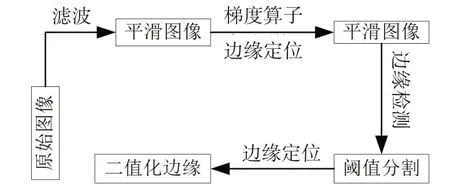
图1 图像一般边缘检测设计流程图Fig.1 The flow chart of general image edge detection design
(1) 信噪比准则。图像的信噪比越高代表平滑处理效果越好,表达式为:
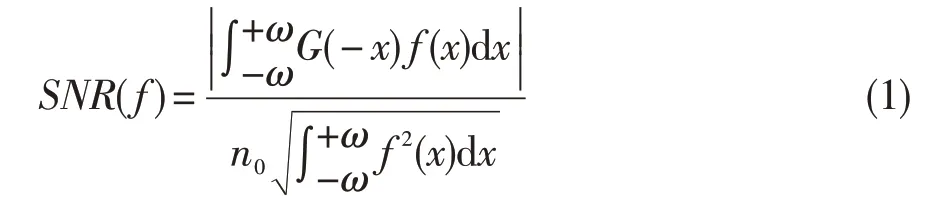
式中:f(x)为边界[-ω,+ω]的滤波器脉冲响应,G(-x)为图像边缘函数,n0为高斯噪声的均方根。
(2) 定位精度准则。定位精度用Lo cal ization表示,其值越大表示定位精度越高,表达式为:

式中:G′(-x)和f′(x)分别为G(-x)、f(x)的一阶导数。
(3) 单边缘响应准则。单边缘只有一个响应,表达式为:

2.2 传统Canny算子边缘检测实现步骤
Canny算子是一个多步骤的处理过程,具体为:
(1) 图像平滑,使用高斯平滑滤波器对图像进行处理。高斯平滑函数选择为:

(2) 确定边缘点,计算平滑后图像在x、y方向的梯度值Gx和Gy。梯度方向角可表示为:

梯度幅度值表示为:

(3) 对梯度幅度值进行非极大值抑制,细化边缘点。
(4) 用双阈值算法检测和连接边缘。对检测到的初始边缘点,利用双阈值法进行处理,高阈值实现进一步筛选边缘点,低阈值实现连接边缘点。
传统Canny算子边缘检测设计流程见图2。

图2 传统Canny算子边缘检测设计流程Fig.2 The flow chart of traditional Canny operator edge detection design
3 改进Canny算子边缘检测算法
针对传统Canny 算子存在的不足,结合尾喷口特征,对传统Canny算子进行改进。改进Canny算子设计流程如图3所示。
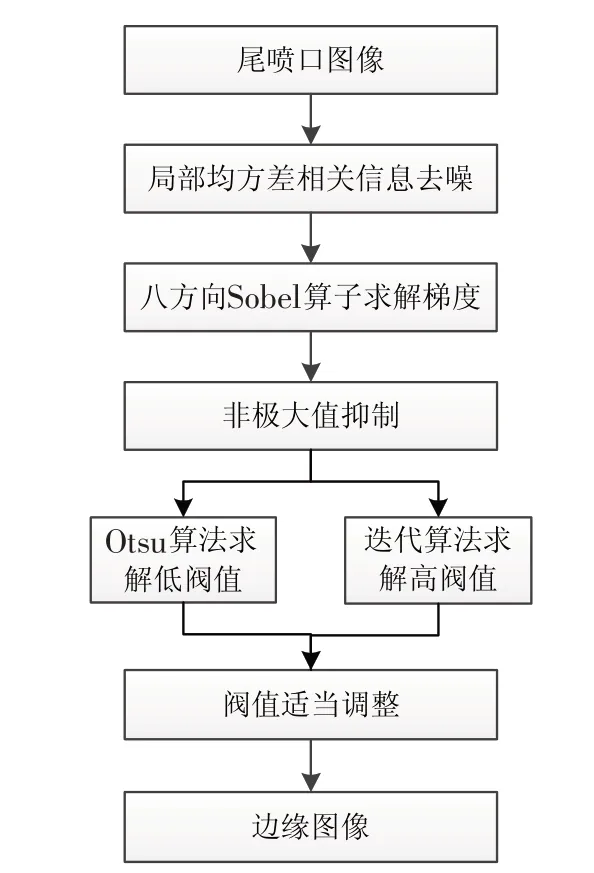
图3 改进Canny算子设计流程Fig.3 The flow chart of proposed algorithm design
3.1 基于局部均方差方法去噪
基于局部均方差的方法既能有效去除加性噪声,同时还具有保留边缘的功能,且运算简单[10],能够很好地解决高斯滤波进行模糊存在的问题(容易丢失边缘信息,且检测过程易出现误检和漏检)。
基于局部均方差的算法描述如下。对于一幅N×M大小灰度图像,用xij表示(i,j)位置的像素值,则(2n+1) ×(2m+1) 窗口内部的局部平均值mij及局部均方差νij可表示为:

加性去噪后的结果可表示为:
式中:σ为用户输入的参数。
3.2 八方向Sobel算子
传统Canny 算子边缘检测过程中,幅值和方向采用水平垂直方向的Sobel 算子求解。为使得Canny算子最终能够更准确定位,以及更加平滑连贯边缘,本文选用八方向Sobel 算子求解幅值和方向,具体原理参考文献[11]。采用3×3的八方向模板,卷积模板算子如图4所示。图中,H1、H2、H3、H4、H5、H6、H7和H8分别对应0°、45°、90°、135°、180°、225°、270°和315°模板。计算8 个邻域的灰度变化,并将灰度变化最大的元素转化为灰度变化矩阵;将灰度变化矩阵转化为灰度图像,求解灰度阈值。
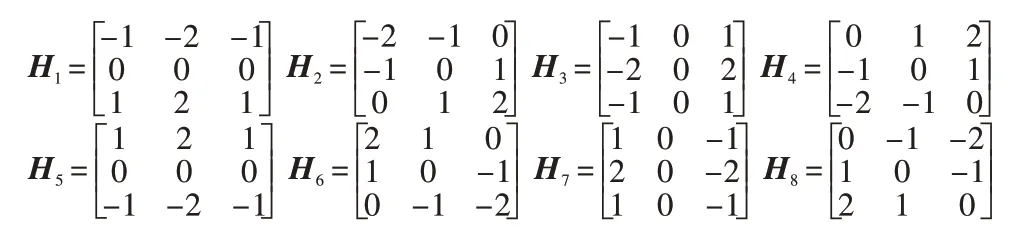
图4 八方向Sobel卷积模板Fig.4 Eight-direction Sobel convolution template
3.3 Otsu自适应阈值求解高阈值
基于直方图的最小二乘法演变而来的Otsu,是确定图像二值化分割阈值的一种算法,具有统计意义上的最佳阈值分割。Otsu算法的实现步骤如下:
设图像的灰度值为M,灰度级为L,灰度范围为[0,L-1],阈值T分割为背景部分C0、目标部分C1,灰度级个数为fi,则第i级灰度出现的概率为:

C0的平均灰度为:

C1的平均灰度为:

图像全局灰度均值为:
最大类方差可表示为:

简化式(15),则:

求解出使得式(16)最大的值为高阈值TH。
3.4 迭代最优算法求解低阈值
迭代阈值分割法具有较强的自适应性,可通过迭代求出最佳分割阈值。迭代阈值分割法选取阈值的步骤如下:
第一步,初始化阈值。

式中:Tmin代表图像最小灰度值,Tmax代表图像最大灰度值。
第二步,用阈值T1分割图像。将图像分成A和B两个部分,A 部分由灰度值大于T1的像素组成,B 部分由灰度值小于等于T1的像素组成。
第三步,计算A、B两部分的平均灰度值μA和μB,并在此基础上利用公式(17)求得新的阈值。

第四步,阈值判断。判断ΔT=T2-T1是否大于0,如果满足ΔT>0,则结束迭代过程,并视为Canny算子中的低阈值TL;否则,重复第三步和第四步,继续执行迭代过程,直至满足ΔT>0。
4 实验验证
4.1 发动机尾喷口模型设计
模型设计的原因:第一,发动机尾喷口测量是军工科研的重要部分,基于保密等原因,可利用的尾喷口测试图像很少;第二,由于无真实尾喷口图像,利用SolidWorks软件完成了发动机尾喷口模型1的仿真设计,见图5。因模型1结构较复杂,目前3D打印技术难以加工出实物模型,为此简化了设计的模型,利用SolidWorks软件完成了发动机尾喷口模型2的仿真设计(图6),并加工出实物模型。
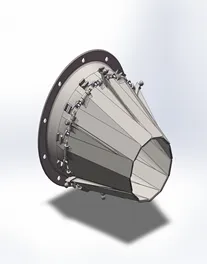
图5 发动机尾喷口模型1仿真设计Fig.5 Engine nozzle model 1 simulation design

图6 发动机尾喷口模型2仿真设计Fig.6 Engine nozzle model 2 simulation design
4.2 实验测试
选取的测试图片为仿真设计的尾喷口模型。通过改进传统Canny算子进行边缘检测。利用局部均方差法代替高斯滤波,用八方向Sobel算子求解幅值和方向,并采用迭代最优算法和Otsu自适应算法求解高低阈值。尾喷口仿真设计模型的边缘检测结果见图7。可见,传统Canny算子图像边缘有许多噪声干扰,同时出现较多伪边缘,不能很好地提取反映尾喷口图像的特征。本文提出的改进Canny 算子,不仅能很好地滤除噪声干扰、有效保留边缘,还可提取尾喷口的喷口边界和周围鳞片轮廓的特征。
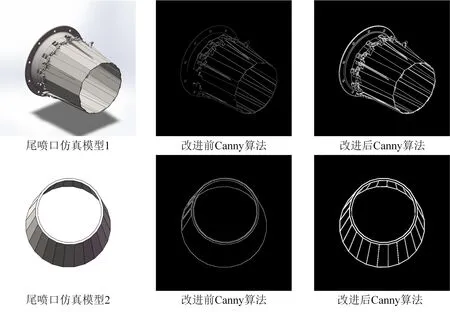
图7 尾喷口仿真模型边缘检测结果Fig.7 The nozzle simulation model edge detection results
利用3D打印技术将仿真模型进行打印,打印出的实物模型边缘检测结果如图8所示。

图8 尾喷口实物模型边缘检测结果Fig.8 The nozzle physical model edge detection results
为了客观评价图像质量,采用最常用的峰值信噪比(PSNR)和均方误差(MSE)两个指标进行衡量。峰值信噪比和均方误差的定义式分别如公式(19)、(20)所示。表1 给出了尾喷口实物模型图像边缘检测的PSNR、MSE测量值。由表可知,改进Canny 算子的PSNR值比传统Canny 算子的大,MSE值比传统Canny 算子的小。这表明改进Canny 算子具有更好的去噪效果和更高的准确度。
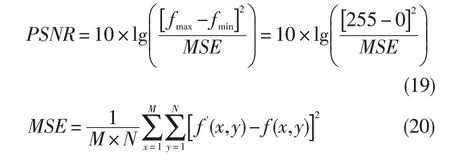

表1 边缘检测的峰值信噪比和均方误差测量值Table 1 PSNR,MSE results values
5 结束语
为了实现稳定、高精度地提取发动机尾喷口周围鳞片、喷口边界特征,以提高标定的精度和测量精度。针对传统Canny 算子存在的不足进行了改进。利用局部均方差方法代替高斯滤波进行去噪处理,通过八方向Sobel 算子求解幅值和方向,并在阈值选择方面进行优化设计。实验对比验证表明,改进的Canny 算子能有效去除噪声,很好地保留图像边缘,更准确地定位边缘,可自适应地代替人工进行阈值设置,使得到的图像边缘更突出,高质量地实现了尾喷口图像边缘检测效果。