UG运动仿真在注塑机调模装置设计中的运用
2022-10-28刘华华
许 颖,刘华华,雷 波
(湖北三峡职业技术学院,湖北 宜昌 443003)
0 引言
注塑机调模机构是合模系统的一部分,在注塑机合模系统的技术参数中有最大模厚和最小模厚,最大与最小模厚的调整便是依靠调模装置来实现的,因此调模装置的作用就是调节模板距离,同时还可以调整合模力的大小。目前常用的合模系统有液压式和液压机械式。在液压式合模系统中,移动模板的行程是由合模油缸的行程来决定的,其最大与最小模厚的调整是利用合模油缸来实现的,调模行程是移动模板行程的一部分,所以该合模系统没有单独的调模装置。但对于液压机械式合模系统,如具有代表性的液压肘杆式合模系统,因为机械肘杆机构的工作位置固定不变,移动模板行程不能调节,所以为了安装不同厚度的模具,扩大注塑机的生产范围,必须单独设置调模装置。
1 调模装置
(1) 螺纹肘杆式调模装置:该调模装置是通过调节肘杆的长度实现对模具厚度和合模力的调整,这种调模装置结构简单、制造容易、调节方便,但螺纹要承受合模力,合模力不宜过大,调整范围有限,多用于小型注塑机。
(2) 动模板间大螺母式调模装置:该调模装置是通过调节螺母使动模板间距离发生改变,从而实现对模具厚度的调节和合模力的调整。这种调模装置增加了一块动模板,增加了开合模移动部分的重量,多用于中小型注塑机上。
(3) 油缸螺母式调模装置:该调模装置是通过调节合模油缸外圆柱面上的螺纹,使合模油缸沿拉杆向前或向后移动,实现模具厚度和合模力的调整。这种形式调整方便,主要适用于中小型注塑机上。
(4) 拉杆螺母式调模装置:该调模装置是形式比较多的一种,可以采用齿轮调模或链条调模。调模装置安装在后模板上,通过改变后模板的固定位置来实现模具厚度和合模力的调整。这种调模装置结构紧凑,安装、调整比较方便,但要求在调整过程中4个螺母调节量保持一致,否则会因受力不均导致模板发生歪斜,因此同步精度要求较高,结构比较复杂。此类调模装置在小型注塑机中可采用手轮驱动调模,在中、大型注塑机中采用普通电动机、液压马达或伺服电动机驱动调模,其调整量则以标尺、电子尺或计算机进行显示。
齿轮调模装置(如图1所示)和链条调模装置(如图2所示)都可以运用于液压肘杆式合模系统中。齿轮调模装置传动平稳性好、精度较高、强度高、噪声低、传动功率大、效率高,但对应用环境和润滑条件要求较高,且不适合灰尘较多以及距离较远的两轴之间的传动,制造和安装精度要求高。链条调模装置对应用环境的要求一般,可用在高温、重载、低速、尘埃较大的环境中,并且适合较远两轴间的传动。两者相比,链条调模成本低,但寿命较短;齿轮传动平稳,寿命长,但要求制造和安装精度高,成本高。
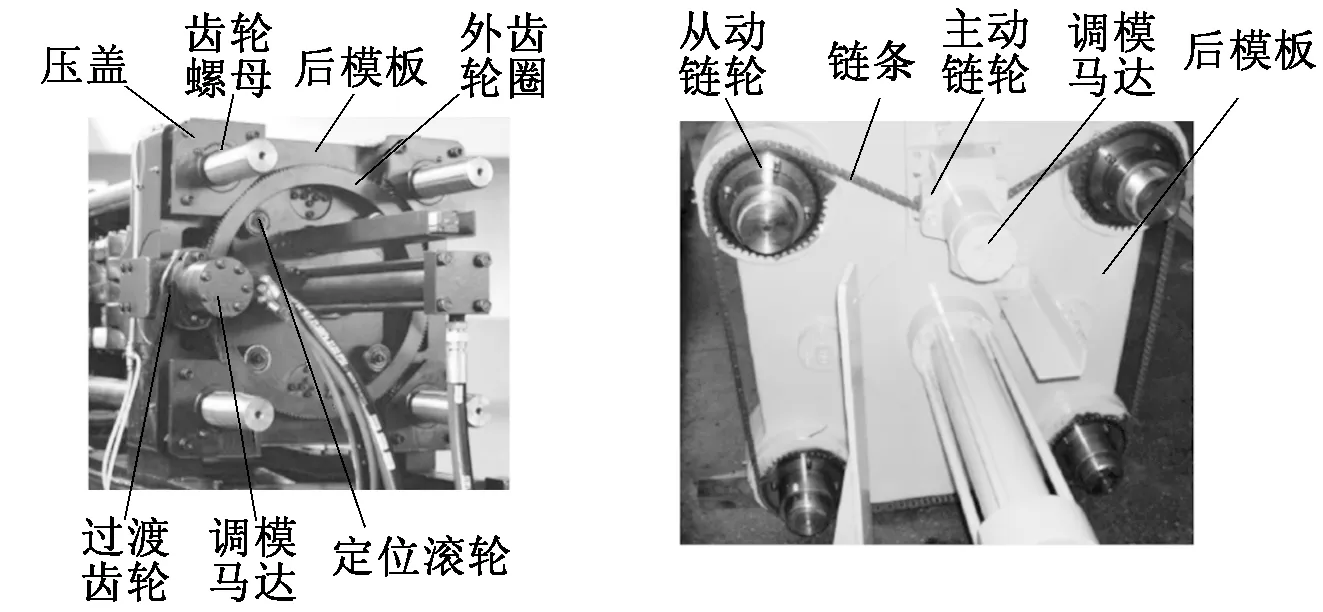
图1 齿轮调模装置 图2 链条调模装置
2 链条调模装置的设计过程
本文运用UG软件以液压双曲肘合模系统中的链条调模装置为例进行整体三维实体建模、装配及运动仿真分析,并借助分析结果对该装置进行优化设计。
图3为运用UG设计液压双曲肘合模系统中链条调模装置的流程。首先运用UG软件的三维建模功能设计链条调模装置的零件,对整个合模系统的零件进行建模;然后运用UG软件的装配功能进行链条调模装置的装配,这需要将整个合模系统按实际要求虚拟装配到位,并通过全面分析判断装配过程中是否存在偏差,如果有较大偏差,则需要对相应的零件进行修改;如果没有偏差,再运用UG软件中的运动仿真功能对链条调模装置进行校调,实时呈现其开、合模状态,观察虚拟运动环境下的各零部件是否存在干涉,如果存在干涉,则需要对装配过程中的数据进行重新修正;如果不存在干涉,则最后借助UG软件虚拟仿真的结果对链条调模装置进行优化,使设计的零件结构、尺寸更加精准。
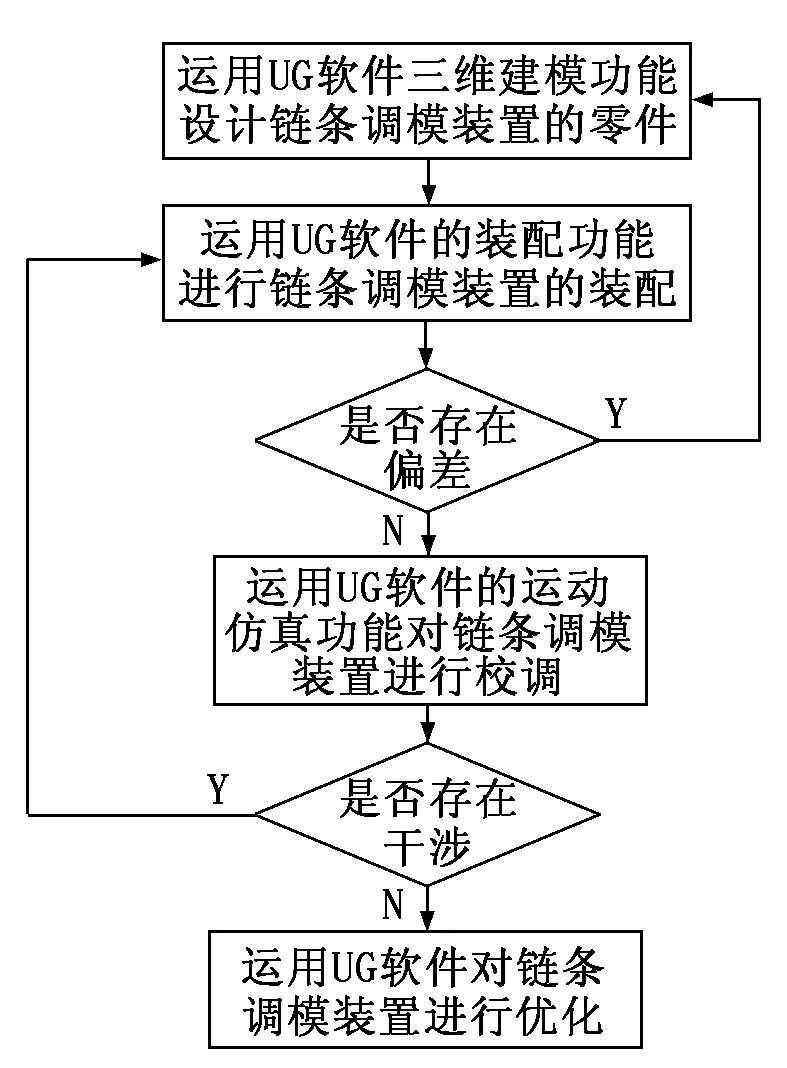
图3 运用UG设计液压双曲肘合模系统中链条调模装置流程
2.1 链条调模装置零件设计
链条调模装置中主要包括合模系统中的三板(即定模板、移动模板和后模板)、肘杆以及链传动中的链轮、链条等,其中三板和肘杆的设计在合模系统主体设计时完成,链轮、链条和链轮螺母在该调模装置中的设计较复杂也最重要,利用UG软件按照链传动的实际参数设计内链板和外链板三维模型,设计主动链轮和从动链轮的三维模型,绘制链条的安装轨迹线,其长度为链条节距的倍数,从动链轮与拉杆之间依靠链轮螺母连接,如图4所示。
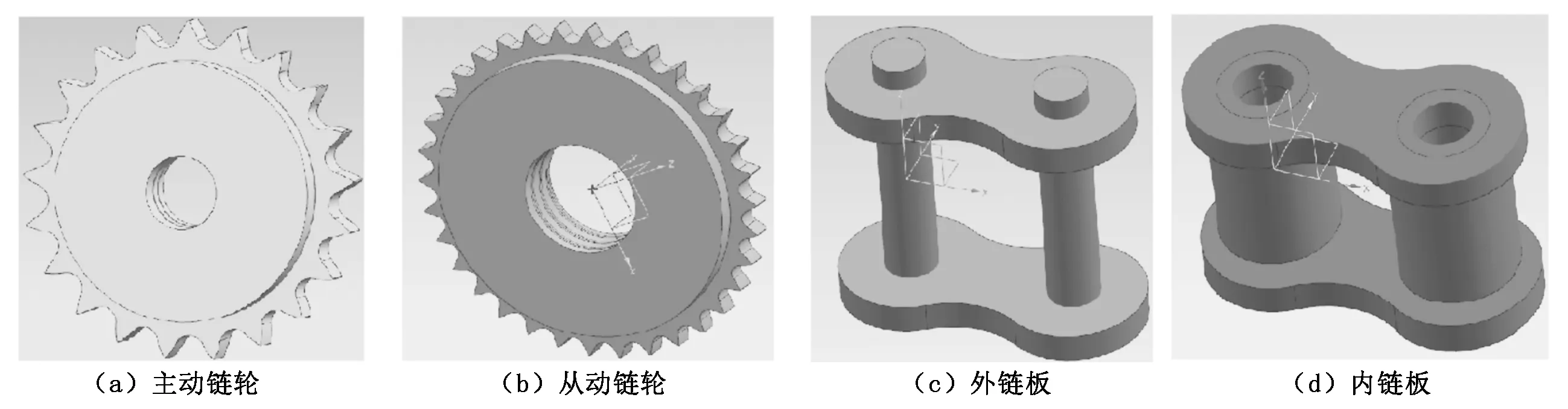
图4 链条调模装置零件三维建模
2.2 链条调模装置装配并仿真调试
利用UG软件的装配功能,将所有设计并创建好的三维实体模型组合在一起(如图5所示),再通过该软件进行运动仿真,调试该装置。
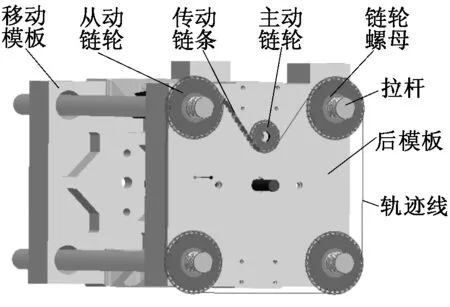
图5 链条调模装置UG装配示意图
链条调模装置是链传动和螺旋传动的组合形式,调模时电动机驱动主动链轮转动,通过传动链条带动4个固定在拉杆上的从动链轮转动,再通过4个拉杆末端的链轮螺母旋转,使后模板前后移动,用以调整模具间的距离实现调模,控制拉杆的弹性变形量,达到控制合模力的目的。从而避免合模力不足导致模具离缝,发生注射过程中塑料溢漏现象,同时也避免合模力过大致使模具变形,制品产生内应力和不必要的能量消耗,导致设备寿命缩短。在调模过程中要保证4个从动链轮的步调一致,保持4个链轮螺母调节量一致。
2.3 对链条调模装置进行设计优化
调模装置作为合模系统中的一个部分,再加上调模装置的校调在实际工作过程中运用的并不频繁,因此基本上都与合模系统一起进行整体设计分析。通常情况下,大批量生产时使用的模具相对固定,模具厚度很少发生改变,调模装置启动次数也相对较少。小批量生产时,涉及到的模具种类较多,模具厚度变化较大,依靠调模装置扩大产能,调模装置启动次数较多。特别是对于小批量生产,液压双曲肘合模系统中的调模装置起着至关重要的作用,会直接影响到产品的质量,所以考虑运用UG软件对链条调模装置进行单独的辅助设计,用以解决生产中的部分问题。
UG软件中的运动仿真是基于时间的一种运动形式,链条调模装置在指定的时间段内运动,同时指定该时间段中的步数,从而进行运动分析,可以比较准确地模拟分析出所设计的链条调模装置的真实运动情况。UG软件中的干涉、测量和跟踪功能可以用于检查链条调模装置在运动仿真过程中的动态干涉和最小间隙,可以跟踪链条调模装置中各零件的运动轨迹,获得链条调模装置的特定运行位置,有助于对设计进行进一步的优化改进。
链条调模装置中的链传动和螺旋传动是设计的关键环节。对于链传动和螺旋传动在运动仿真中可以分别跟踪各个链板及链轮螺母的位置,检验其速度和加速度,并通过对运动模型的干涉检测检查该装置中相关零部件有可能出现的动态干涉,比如对链传动和螺旋传动进行干涉检查时,需要先分别定义两组检查实体,然后在动画中启动干涉检查,定义该装置在发生干涉时停止运动,产生干涉的部位会按给定的颜色显示出来。利用测量功能可以定义链传动调模装置中的一组几何对象的极限距离,如链轮螺母在拉杆上的移动距离等,在进行运动仿真时激活测量检查和暂停功能,便可以动态显示测量的距离值,当该装置运动超出极限范围时会自动停止而产生预警提示。运动仿真中的追踪功能可以在链条调模装置虚拟运动的每一个步骤中创建一个复制的指定几何对象,用于分析查看该装置中某个指定零部件的运行轨迹。
综上所述,运用UG软件中的运动仿真可以将链条调模装置中各零部件之间可能产生的干涉、测量所得的极限距离以及追踪各零部件指定点的运动轨迹是否符合设计预期等真实地呈现出来,可以根据分析结果为设计人员优化设计提供数据依据,指导设计人员优化零件的结构设计。
3 结语
注塑机是一种综合性较强的机电一体化设备,各个机构都有着非常重要的作用,运用计算机仿真对调模装置进行辅助设计,可以从零件的结构尺寸设计修改和链条调模装置的虚拟装配中看到各零部件之间存在的问题,能够大大简化合模系统中调模装置的设计过程,大幅度降低工作量。同时,也可以结合生产实际,导入相关数据进行分析,为解决问题提供重要的参考依据。
