LiDAR传感器及技术在农业场景的应用进展综述*
2022-10-27王潇张美娜ZhouJianfeng孙传亮吴茜曹静
王潇,张美娜, ,Zhou Jianfeng,孙传亮,吴茜,曹静
(1. 南京农业大学工学院,南京市,210031; 2. 江苏省农业科学院农业信息研究所/农业数字孪生联合实验室、种质资源创新与信息化利用联合实验室,南京市,210014; 3. 美国密苏里大学,密苏里州哥伦比亚市,MO 65211)
0 引言
据联合国经济和社会事务部2019年发布的一份报告称,到2030年,世界人口预计将达到85亿,2050年达97亿,粮食安全问题持续倒逼农业生产方式向现代化、智能化、精准精细化方向发展[1]。美国等经济发达国家在20世纪80年代末期便提出精准农业概念,这是一种基于信息和知识管理的现代农业生产系统,可以帮助最大化利用资源,最小化损失和浪费,被认为是未来高效和可持续农业的推动者[2-3]。精准农业系统借助农业装备与设施搭载的各类传感器获取农作物、田间环境等大量信息,用于分析与决策,实现定时、定位、定量控制农资投入与农作物生长,因此,传感器及相关技术在农业生产中的应用需求日益迫切。目前,在农业场景中应用较为广泛的传感器包括光传感器、立体视觉、超声波传感器及激光雷达扫描传感器(LiDAR,Light Detection and Ranging)等[4-5],各类传感器的特点不同,应用场景也不同,其中,LiDAR因其不易受光环境影响、可三维建模、分辨率高、抗干扰能力强、技术与产品成熟等特点被广泛应用于智能农机装备、作物表型检测、无人机低空遥感等领域,为数字农业、精准农业、智慧农业系统的开发提供了技术支撑。
通过查阅大量文献与分类研究,本文系统性介绍LiDAR及相关技术在农业场景中的应用进展,包括LiDAR的性能特点,工作原理与分类,市场应用与新技术;LiDAR在森林参数测量、果树靶标几何特征探测、作物表型几何特征检测、农业车辆自主导航定位以及农药雾滴飘移检测这5个农业场景中的具体应用;讨论分析LiDAR传感器及技术在上述5类农业场景应用中的发展趋势;最后,总结并展望LiDAR传感器在未来农业应用中的发展方向。
1 LiDAR技术发展
1.1 LiDAR简介
LiDAR是激光探测及测距系统的简称,是激光、大气光学、雷达、光机电一体化、电子计算机和信息处理等技术相结合的产物,它利用激光束搭载振幅、相位、频率和偏振等信息,主要用于主动式的遥感探测。LiDAR主要利用电磁波中的近红外、可见光及紫外等波段[6],波长可以从250 nm到11 μm,比传统无线电雷达、微波雷达的波长高出2~4个数量级。LiDAR的特点如下:激光传播方向性好,波束窄,抗干扰能力强;同时,LiDAR的角分辨率高、距离分辨率高、速度分辨率高、测速范围广,能同时捕获探测目标物体清晰的强度图像、距离图像等;体积和重量都比微波雷达小,使用方便灵活[7]。LiDAR及相关技术已被广泛应用于大气监测、无人机遥感、道路检测、车辆自动避障等方面[8-11],先进地图测绘、数字孪生城市构建与自动驾驶导航已成为LiDAR未来的市场主要增长点。
1.2 LiDAR工作原理与分类
LiDAR的工作原理与雷达类似,常用的测距方法包括脉冲法和相位法两种。(1)脉冲法[12]:LiDAR发射端发射集中了能量的激光脉冲,接收端接收到经被测物体反射回的激光后,通过脉冲计数器记录激光发射和反射信号到达的时间,计算出激光传输时间,进而测得雷达与目标物间距离。脉冲法激光雷达量程长、功耗低、结构简单,但受限于系统时钟频率导致测量精度不高,因而主要用于对精度要求一般的远距离场景。(2)相位法[13]:利用固定频率的高频正弦信号,连续调制激光源的发光强度并测定调制激光往返一次所产生的相位延迟,间接地测定信号传播时间,从而得到被测距离。相位法测量精度高,通常达毫米量级。
LiDAR的分类方式较多,下面简述其中5种[12, 14]。(1)按激光波段,分为紫外激光雷达(10~400 nm)、可见激光雷达(390~780 nm)和红外激光雷达(905~1 550 nm)。(2)根据传输波形和数据处理方法不同,可分为脉冲激光雷达、连续激光雷达、脉冲压缩激光雷达、运动目标显示激光雷达、脉冲多普勒激光雷达和成像激光雷达。(3)根据传感器安装平台不同,可分为地面激光雷达、机载激光雷达、舰载激光雷达和航天激光雷达等。(4)根据使用功能不同,可分为目标识别激光雷达、流速测量激光雷达、跟踪激光雷达、成像激光雷达。(5)根据扫描机构的不同,分为二维扫描(单线)和三维扫描激光雷达(4/8/16/32/40/64线)。
1.3 LiDAR技术发展趋势
随着技术的发展、制造工艺的成熟以及应用需求的提高,LiDAR开始呈现出固化、小型化和低成本的趋势,点密度和质量不断提高,新型LiDAR产品与技术不断涌现,如固态激光雷达、单光子激光雷达、高密度激光雷达、全波形(FWF)激光雷达、多光谱/高光谱激光雷达等,下面进行简要介绍。
固态激光雷达传感器基于不含机械运动部件的硅片,目前分为MEMS(Micro-Electro-Mechanical System,微机电系统)、OPA(Optical Phased Array,光相控阵)和Flash三种。MEMS是将机械机构进行微型化、电子化的设计,扫描单元变成了MEMS微镜;OPA技术采用多个光源组成阵列,通过控制各光源发光时间差,合成具有特定方向的主光束,控制主光束实现不同方向扫描;Flash技术是短时间直接发射出一大片覆盖探测区域的激光,再以高度灵敏的接收器接收绘制图像,工作模式类似相机。与传统机械式激光雷达相比,固态激光雷达具有更小的尺寸、更低的成本、更高的空间分辨率和效率,可以集成到便携式设备中[12]。单光子激光雷达是一种光学相机,它采集自身发出的激光到达目标后反射的光子数量信息,不依赖自然光,穿透力强,可以全天候全天时工作。中国科学技术大学潘建伟、徐飞虎教授等实现了超过200公里的远距离单光子三维成像,首次将成像距离从十公里突破到百公里数量级,主要面向低功耗、高分辨率等实用化需求的远距离激光雷达应用[15]。高密度激光雷达能大幅提高激光发射频率,实现高密度采样,获取更加全面的数据。全波形(FWF,full-waveform)激光雷达是近年来发展迅速的激光雷达分支之一,在FWF模式下,每个激光脉冲的反向散射信号被记录为几百个样本,可产生激光覆盖区中待测目标结构的高度细节,有助于显著提高区分不同对象的性能[5]。最早的激光雷达被设计成发射单色波长的脉冲,仅反馈强度信息[16]。为提高捕捉更详细光谱信息的能力,双通道激光雷达、多光谱激光雷达、高光谱激光雷达正得到越来越多的关注,它们将光谱成像技术和激光雷达测距技术相结合,能同时获取目标物的图像信息、光谱信息、位置信息等,实现目标物的多维数据获取,具有测量范围大、实时性强、适用性广等特点[17]。
2 LiDAR在农业场景中的应用
目前,LiDAR在森林参数测量、果树靶标几何特征探测、作物几何表型特征检测、农业车辆自主导航定位以及农药雾滴飘移检测等5个农业场景中应用已较为广泛,下面进行简要阐述。
2.1 森林参数测量
森林参数测量是为了更好地理解和预测陆地生态系统如何应对和影响环境变化,对促进森林生态和改善森林管理具有重要意义[18]。林分尺度的参数包括林冠高度、林分平均树高、优势木平均高度、郁闭度、地上生物量、森林蓄积量、株数密度、物种丰富度、林龄等;单木尺度的参数包括树高、冠幅、枝下高、胸径、生物量等。传统光学遥感测量方法因其不能穿透林冠层,主要依靠反演估算,精准度不够。一些林内光学测树仪器,也因为阴暗的林内环境而达不到良好的效果。LiDAR主动遥感技术在森林参数的定量测量和反演上取得了成功的应用[19],发射的激光脉冲能部分穿透植被冠层,易于获取整个植被冠层的三维结构和冠层下的地形,在垂直纬度参数测量方面优势更为显著。根据应用场景不同,基于LiDAR进行森林调查可采用机载式测量林分尺寸参数与陆载式测量单木尺度参数,光斑尺寸由大光斑(直径8~70 m)向小光斑(直径小于8 m)发展,激光输出波形由单波形向全波形发展。
最早公开发表应用LiDAR进行森林参数测量的是前苏联,随后,机载LiDAR系统开始用于大范围的森林资源调查和林业测量。García等[20]基于Optech-ALTM3033激光雷达系统测量的高度和强度数据估算了森林植被生物量,然后根据其中的碳含量参数计算出当前区域中的植被碳含量。Anderson等[21]使用Lecia BLK 360激光雷达,利用获取的LiDAR点云数据近似森林群落结构的方式预测了物种丰富度。Sun等[22]应用一种机载全波形LiDAR结合高光谱数据测量热带干燥林林龄,有效描述了森林更新情况。Mahoney等[23]基于Optech ALTM-3100激光雷达,结合野外绘图和星载激光高度测量系统测量了林分高度和树冠闭合度参数,其中林分高度平均误差在1 m以内,树冠闭合度平均误差为5%。Simonsona等[24]利用高分辨率的机载激光雷达Optech ALTM 3033数据反演了葡萄牙南部橡树林平均树高,与野外获取的平均树高之间的相关系数为0.85。Ferraz等[25]基于Optech ALTM-3100激光雷达,应用一种基于三维自适应均值漂移技术的方法将整个点云分解为与单个树冠相对应的3D点云群,用于测量树高、树冠面积以及树木分布密度等参数。庞勇等[26]基于RIEGL LMS Q 280i激光雷达数据计算树高,总体平均测量精度为90.59%,其中阔叶树的精度高于针叶树。大量国内外研究结果表明,激光雷达对林木冠层高度反演技术已趋于成熟。
2.2 果树靶标几何特征探测
精准变量喷雾技术能够实现果树靶标的按需施药,在提高农药有效利用率的同时又能减少农药危害[27]。果树靶标几何特征检测是实现果园风送喷雾机精准变量喷雾的基础和前提,特征参数主要包括树冠高、宽、生物量体积、叶面积以及衍生计算得到的叶面积密度(LAD,Leaf area density)和叶面积指数(LAI,Leaf area index)等。为获取精准的靶标几何特征参数,各类无损、无接触、快速且可重复的传感器层出不穷,如雷达系统、医用或工业用检测仪器(高分辨率计算机体层X线摄影技术,核磁共振成像)、数字摄像机、光传感器、立体视觉、超声波传感器以及LiDAR等,其中,LiDAR精度高、响应快、能够获得靶标的三维模型,是最具发展潜力的靶标几何特征探测传感器[28-29]。
Arnó等[30]基于SICK LMS 200激光雷达探测系统,测量计算了葡萄藤的高度、横截面积、树冠体积和树面积指数,验证了以上参数与叶面积指数的相关性,其中树面积指数与叶面积指数相关性最高。Mahmud等[31]开发了一种基于VLP-16激光雷达传感器的树冠密度测量系统用于指导果园精准施用农药,验证了靶标点云数据与叶片数量存在较强的相关性,小树区域相关系数为0.82,大树区域相关系数为0.95。Zeng等[32]基于VLP-16激光雷达传感器开发了果树靶标探测系统,通过算法分割出栽培用网格线、支撑点与树干部分,总体精度分别为88.6%,82.1%和94%,根据这些参数计算了靶标树冠高度、密度和深度等参数,为果园精准施药和机械化修剪提供基础信息。张美娜等[33]基于SICK LMS 111激光雷达扫描传感器构建了一种靶标精准探测系统,提出了靶标网格化喷施区域内叶面积密度参数的计算方法。
2.3 作物几何表型特征检测
作物几何表型特征检测是作物育种高通量表型分析的支撑技术之一,辅助测量作物株高、叶片角度分布、叶面积、叶面积密度等表型特征,用于检测不同基因型与环境条件下的作物长势,为筛选优良作物品种、预测作物产量、指导田间管理和实现对农业投入和处理的精准控制提供数据基础[34]。高通量作物表型系统中的传感器种类丰富,主要包括RGB相机、多光谱/高光谱成像传感器、温度近红外成像传感器、叶绿素荧光成像传感器以及LiDAR传感器等,如表1所示,可测量光合作用系统的荧光特性、生长速度、抗病性、非生物胁迫耐受性、总体形态、物候学等全面的表型特征[35]。随着LiDAR技术的发展与成本的降低,越来越多的表型平台将LiDAR作为基本配置,构建作物的3D结构信息,如田间表型移动平台、设施表型平台、无人机低空遥感平台。

表1 常用传感器应用范围和使用限制Tab. 1 Application range and usage limits of common sensors
田间作物表型系统研究方面,Greaves等[36]利用Riegl VZ-400激光雷达数据衍生的灌木生物量估算了灌木叶面积,其中激光雷达数据和针叶树生物量相关系数为0.97。Saeys等[37]使用SICK LMS 200/400两种LiDAR传感器,在收获机不同行驶速度和震动条件下估算了收获机前方作物密度参数,三维重建算法的相关系数在0.63到0.93之间。Jimenez-Berni等[38]基于SICK LMS 400激光雷达和Phenomobile Lite移动平台设计了一种田间作物表型系统,提出了两种基于LiDAR获取地上生物量的计算方法并进行了试验验证。程曼等[39]利用地面激光雷达SICK LMS 291对花生冠层结构进行扫描,获取其三维点云数据,通过分析有效点云数据集生成的冠层高度矩阵,得到冠层的高度特性。
在设施作物表型系统研究方面,Wang等[40]开发了一种低成本的二维LiDAR室内植物表型系统,通过系统运动与数据配准可获取作物三维点云数据,线性回归分析表明,系统测量的叶片最大高度、叶柄高度、叶尖高度、叶片表面积4种参数与地面真实值的相关系数分别为0.98、0.98、0.99、0.92。郭庆华等[41]研发了一套以Faro Focus X120激光雷达为主,集成高分辨率相机、热成像仪、高光谱成像仪等传感器的高通量作物测量平台—Crop 3D,与传统作物表型测量技术相比,Crop 3D优势在于能够通量化、同步地对作物各生长时期进行多源表型数据的获取并提取株高、株幅、叶长、叶宽、叶倾角和叶面积等参数。
在无人机低空遥感研究方面,Lin等[42]搭建了一个无人机低空遥感的通用框架,用于进行多时间尺度LiDAR数据控制与作物特征检测,网格垂直方向与平面方向上的多时相点云距离差为±3 cm与±8 cm。王庆等[43]以大田甜菜为研究对象,探究无人机分别搭载RGB相机与RIGEL VUX-1UAV激光雷达系统对大田作物株高估算的精度差异,结果表明基于激光雷达系统估算的株高相关性较高,为0.88。
2.4 农业车辆自主导航
农业车辆自主导航是支撑智能农机与精准农业的关键技术之一[44]。自主导航农机装备的应用可以减少劳动力投入,减轻驾驶员的劳动强度,提高作业的准确性。搭载自主导航控制系统的动力装备通过挂接各种农机具能够精准完成耕种、除草、施肥、施药、收获等多种作业环节,是实现无人农场的基础[45]。近年来,大田自主导航技术与产品已趋于成熟,如AF302BD-2.5RD、NX300、RinoSteer等。尽管如此,农业车辆作业环境是典型的非结构化环境,应用在其中的传感器需要克服地面不平整、障碍物种类多等困难,以机器视觉和卫星导航系统为传感器核心的农业车辆自主导航仍存在一些问题,机器视觉受作业环境、光照条件的影响比较大,卫星导航系统则易受卫星信号的影响;而LiDAR不受能见度或环境水平的限制,能以较高频率提供大量准确的距离信息,可靠地提供周围物体的方位和深度信息,能够进行障碍物检测,在果园和设施场景中的应用优势更为明显。
在果园作业装备自主导航系统研究方面,Underwood等[46]基于SICK LMS 291激光雷达传感器提出了一种果园田间果树识别与定位方法,采用隐式半马尔可夫模型分割果树个体,定位与识别精度达98.2%。李秋洁等[47]基于二维LiDAR获取果树行间数据,设计了椭圆感兴趣区域提取相邻树行、两步树行分割法获取相邻树行数据,通过最小二乘法拟合树行直线,树行中心线作为导航路径,试验结果表明,在偏航角不大于15°、横向偏差不大于1 m、缺树率不大于25%时均能将车辆轨迹与道路中心线的横向偏差控制在±14 cm内。刘伟洪等[48]提出一种基于R-Fans-16 3D激光雷达的果树行识别与导航线拟合的方法,在梨园中,0.68 m/s与0.135 m/s的速度下,横向误差绝对值分别不超过21.3 cm与22.1 cm。刘星星等[49]基于低成本的SICK LMS 291单线激光雷达,提出一种基于最小二乘法与支持向量机融合的树行识别与导航方法,试验结果表明横向误差平均值不超过17.8 mm。
在设施作业装备自主导航系统研究方面,侯加林等[50]研制了基于前后双FS-D10激光雷达的温室运输机器人导航系统,与单激光雷达相比,增加了环境扫描范围,提高了建图效率及实时避障能力,车载系统分别以0.2、0.5和0.8 m/s的速度运行时,实际导航路径与目标路径的平均偏差小于13 cm,标准差小于5 cm。季宇寒等[51]搭建了基于SICK LMS 511激光雷达的巡检机器人导航平台,使用自适应蒙特卡罗定位(AMCL)算法估计机器人位置和姿态,通过经典的PID算法完成机器人驱动控制,试验结果表明,在1 m/s 的速度下,位置与航向偏差的平均绝对误差分别小于5 cm和1.1°。
2.5 农药雾滴漂移检测
植保机械施药过程中产生的最大污染源之一为漂移的农药雾滴,有证据表明,杀虫剂可以通过气流传播数千公里[52],对人类健康和环境都有风险。另一方面,雾滴漂移造成的损失可达所用农药产品的30%~50%[53],不仅造成经济损失,还产生了农业面源污染。因此,分析影响雾滴飘移的主要因素、研究农药雾滴飘移机理,可为植保机械喷雾部件的研究提供理论依据,有效提高植保机械的喷施效果,减少农药飘失,增强环境保护,具有重要的现实意义[54-55]。测量雾滴漂移的传统方法主要通过被动收集器和示踪剂在现场采样并进行后续化学/物理试验实现,劳动强度大,依赖外部环境条件,只提供点和时间的综合测量信息,无动态过程,具体可参照国际标准ISO标准22866—2005。与传统方法不同,应用LiDAR技术可以实现动态实时测量,获得具有高时间、空间分辨率的多维数据信息,消耗更少的人力和时间资源,并且不需要后续的化学分析,主要用于定性研究农药羽流的移动和扩散。
基于LiDAR系统测量雾滴漂移的早期研究在1989年,Hoff等[56]建立了一个激光雷达系统,用于检测空中喷洒农药雾滴的几何结构和沉积情况,测量了喷洒飞机翼尖涡流中的近场农药喷洒运动,证明了LiDAR可以作为长期预测漂移量的一种新方法。国际上,西班牙莱里达大学的研究团队长期开展了基于LiDAR测量雾滴漂移的研究[57-60],2015年,团队搭建了一种对人眼安全的LiDAR系统[57],可测量50~100 m 范围内的雾滴漂移运动;2016年,应用开发的LiDAR系统开展了雾滴漂移试验[58],结果表明激光雷达测量的喷雾漂移量和被动收集器得到的数据之间相关系数大于0.85,同时,应用该系统试验对比了低漂移喷头与标准喷头的作业效果,结果表明低漂移喷头减少雾滴漂移57%;2019年,应用开发的LiDAR系统对喷雾机分别安装10种空心锥喷头静态喷雾条件下,开展了23项雾滴漂移试验[59];2020年,应用开发的LiDAR系统分别在四种果树(桃、柑橘、苹果和葡萄)生长环境下测量并评估喷雾机动态作业下标准与低漂移喷头的雾滴漂移情况[60]。Gil等[61]在葡萄园施药期间,使用SICK LMS 200激光雷达传感器测量雾滴漂移,实验结果表明测量值与真实值间相关系数为0.91,因此采用的检测方法可以作为评估漂移的替代方案。
上述5个农业场景中应用的LiDAR系统主要参数与应用如表2所示。
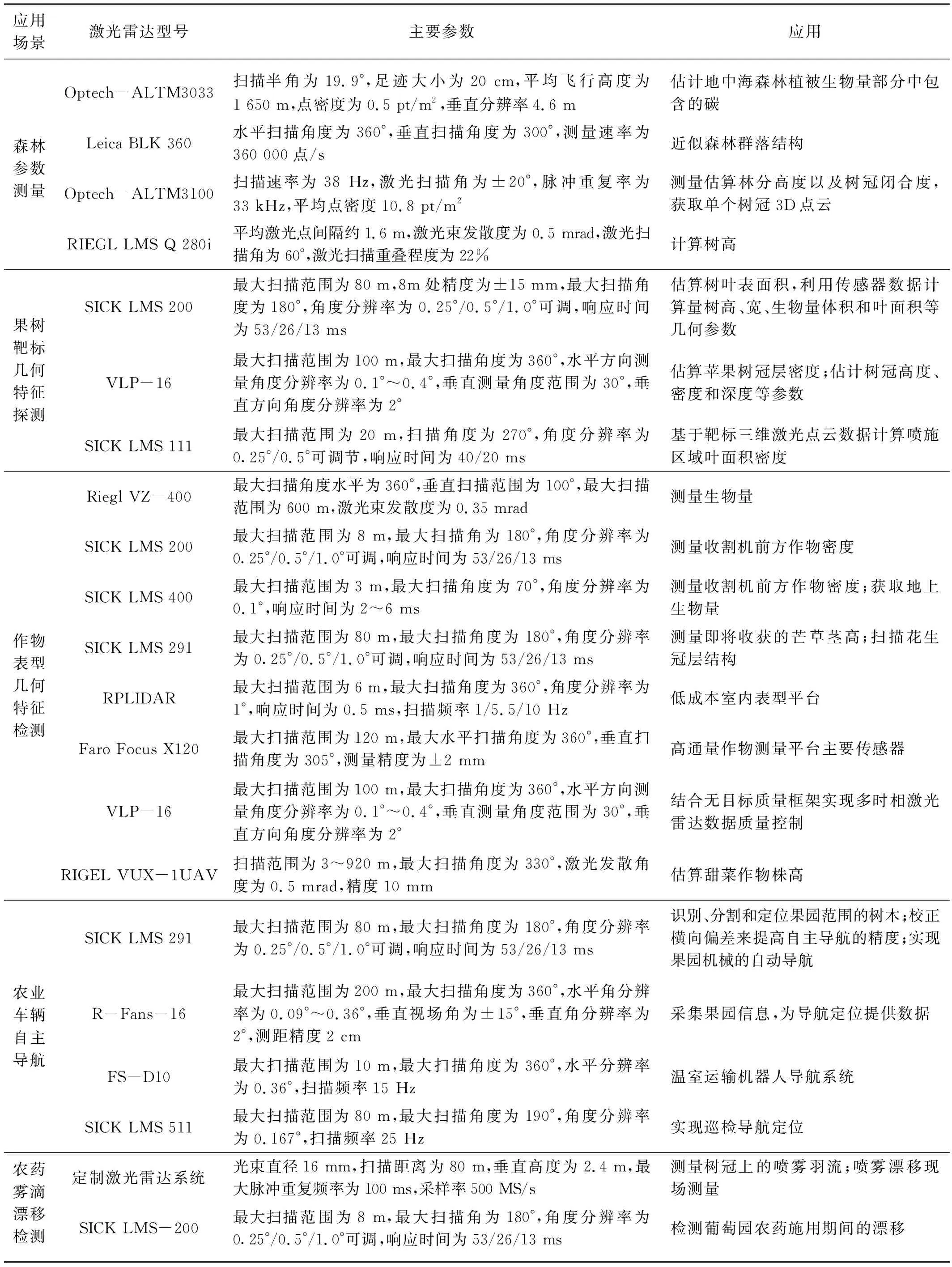
表2 主要应用激光雷达型号及参数Tab. 2 Main types and parameters of lidar applications
3 讨论
综合上述5个农业场景可知,LiDAR的探测对象主要为农田环境与作物本身两大类,分别具有其特殊性。农田环境是复杂的非结构化环境,地面地形复杂,环境中光照和气候条件多变且不可控制,目标物表面过亮会导致镜面反射,风、雾、尘等引起的偏差和遮挡等,都会对LiDAR数据精度和质量产生影响。另一方面,农作物是有机的生命体,作物品种、生长期、栽培模式、测量尺度等不同因素都会影响LiDAR测量系统的检测效果。下面简要分析LiDAR在相应农业场景应用中的发展趋势。
3.1 森林参数测量
LiDAR数据已经成为预测一系列森林属性的关键数据源,可直接获得单株木的位置、树高和冠幅这3个垂直结构参数。随着机载LiDAR技术获取与处理多源数据能力提升,树种识别效率得到了一定程度的提高,为森林碳储量估算、森林生物多样性、森林再生等研究提供了基础。应用LiDAR进行森林调查,未来将重点集中在提高LiDAR测量精度,融合LiDAR与高光谱图像、星载激光数据等其它传感器数据,以及构建数据处理体系与标准化流程等方面。
3.2 果树靶标几何特征探测
基于LiDAR进行果树靶标探测的关键在于提取计算合适的几何特征参数,目前国内外研究主要集中在靶标生物量体积的计算,近些年开始增加表征树冠枝叶稀疏状况的叶面积密度参数,未来将在靶标几何特征的基础上拓展病虫害信息的检测,从而综合确定精准的施药处方。
3.3 作物几何表型特征检测
基于LiDAR进行作物几何特征检测具有独特的优势,使作物三维形态的表达更加立体、细致,为提取更多的作物几何特征参数奠定了基础,未来将重点集中在新型几何特征参数的全自动提取算法上,平衡精准性与实时性指标,更好的服务于高通量表型系统。
3.4 农业车辆自主导航
基于LiDAR的农业车辆自主导航系统主要应用二维激光雷达沿作物行行驶获取环境三维数据信息,有效地降低了成本,但测量精度有待提高。随着三维激光雷达传感器技术的发展,应用高线数、低成本的固态三维激光雷达为未来的发展方向,能够获得高精度、高速率、广视角的大量三维点云数据,空间信息更加丰富,进一步提升对农业复杂多变环境的适应性。
3.5 农药雾滴漂移检测
LiDAR由于其在时间和空间分辨率、实时测量,以及其减少的劳动力和时间等方面的优势,成为传统测量方法的有利替代方案。同时,在雾滴沉积测量方面,相关研究结果表明,激光雷达测量的漂移云和放置在测试台上的人工收集器上获得的雾滴沉积分布之间具有良好的相关性。在雾滴漂移检测领域中,应用的LiDAR系统呈现定制化的趋势,即根据应用需求设计开发专用的测量系统,在降低成本、提高系统专用性上有所提高,是未来发展的主要方向之一。
综上所述,各类农业场景对LiDAR技术及数据处理方法的需求和挑战仍在继续。随着LiDAR新技术的不断涌入,应用固态激光雷达、单光子激光雷达、高密度激光雷达、全波形(FWF)激光雷达、多光谱/高光谱激光雷达等新型LiDAR传感器,将在数据多尺度、精准性、全面性、丰富性和实时性上不断适应农业场景的不同层面需求,更好地支撑现代精准农业发展。
4 结论
随着农业产业向现代农业、精准农业、智慧农业不断演进,农业场景对新型传感器的需求日益迫切,传感器作为人类感知的替代能更全面、更精准地获取作物、环境等相关信息,是农业现代化发展的基础性、关键性的支撑技术。与视觉传感器、光谱传感器、超声波等其他类型传感器相比,LiDAR传感器不易受光环境影响、可三维建模、分辨率高、抗干扰能力强、技术与产品成熟等特点使其在农业领域应用中具有独特的优势。本文重点介绍了LiDAR传感器的性能特点、工作原理和分类、市场应用与新技术;通过国内外大量研究文献的筛选分类,总结了LiDAR传感器在森林参数探测、果树靶标几何特征探测、作物表型几何特征检测、农用车辆自主导航定位以及农药雾滴飘移检测这5类农业场景的应用进展与发展趋势;针对农业场景的特点,现阶段应用的LiDAR传感器技术与数据处理方法仍存在局限与不足,为此,展望了固态激光雷达、单光子激光雷达、高密度激光雷达、全波形(FWF)激光雷达、多光谱/高光谱激光雷达等新型LiDAR技术与产品在未来农业场景中的应用潜力,指出了与LiDAR传感器配套的自动化采集系统与数据智能分析方法将成为研究重点。