一种临床微创手术用刚性可控机械手设计与研究
2022-10-27姚方辉扶玉珍李文仿
姚方辉,扶玉珍,李文仿
1.十堰市太和医院(湖北医药学院附属太和医院)普外科,湖北 十堰 442000;2.湖北医药学院 组织学与胚胎学教研室,湖北 十堰 442000
[关键字] 微创手术;机械手;折叠结构;刚性可控
引言
随着大数据、物联网、通信技术[1-2]的不断发展,人们对医疗设备的要求也越来越高。微创手术(Minimally Invasive Surgery,MIS)具有瘢痕小、术后疼痛轻、住院时间短和术后恢复快等优点,已成为医学领域中的重要一环,受到了人们广泛地关注[3-5]。自然腔道内镜手术(Natural Orifice Transluminal Endoscopic Surgery,NOTES)作为一种典型的MIS,可通过口、结肠或阴道途径进入病变部位,从而减少组织损伤[6-7]。然而,NOTES手术过程中对机械手要求较高:① 机械手结构需紧凑且灵活,从而可在不扭结或损坏腔内壁的情况下穿过病变部位;② 在操作过程中,机械手需要满足刚性要求,从而为顺利操纵手术工具奠定基础。因此,需要开发满足上述要求的手术器械,这对推动NOTES的快速发展和其广泛应用具有重要意义。然而,传统的刚性手术工具和柔性内窥镜不能完全满足临床要求,因此不能直接应用于NOTES。基于此,有研究者对刚性蛇形机械手进行研究,并取得了一定进展。孟巧玲等[8]提出了一种基于柔性铰链的仿生外骨骼机械手,该机械手通过增大控制线张力来增加刚性连杆之间的摩擦。然而,高刚度需要高的线张力,并且连杆需要足够大以承受负载。Gao等[9]提出了一种考虑相变传热过程与材料温度效应的可变刚度内窥镜机械手设计方法。相变材料使得机械手在不同温度变化时在刚性模式和柔性模式之间切换。这种方法可以获得较好的刚度,然而较长的激活时间限制了其在实际中的应用。张德福[10]和郝兵等[11]设计了气动和液压机械手,通过可控流体压力或液压,能获得稳定刚度,然而这类设计的机械手对于精细化操纵存在明显的不足。此外,还有研究提出具有折叠式结构[12-18]的机械手装置,该装置通过交叉交织的纤维网状结构构成,可在纵向拉伸时显著减小直径,这类网状结构具备折叠性、重量轻、柔韧性、抗疲劳性和尺寸稳定性等优点,已广泛应用于医疗、织物、建筑等领域中。
本文旨在提出一种刚度可调的新型折叠结构机械手密封管结构,该密封管主要采用编织骨架实现径向折叠,并利用薄膜密封骨架,从而可通过负压调节刚度,以期满足MIS机械手结构紧凑、灵活、刚性可控等要求。
1 机械手密封管设计与制造
1.1 机械手密封管设计原理
密封管由织管骨架和密封管薄膜组成,编织管的几何形状如图1a所示,分别由编织角度(β)、管直径(D)、管长度(L)以及纤维直径(d)和纤维数量(n)决定。纵向拉伸/压缩时,D随β的改变而发生变化,导致管折叠或展开。然而纤维在变形过程中几乎不可拉伸,其长度(l)可通过公式(1)计算。

式中,c为常数,表示每根纤维的线圈数;D'和β'分别表示管变形后的直径和编织角度。根据公式(1),变形管的D'计算方式如公式(2)所示。

理论上,β在0~90°。当β接近0°时,D'趋于上限D/cosβ;当β接近90°时,D'趋于下限2d。因此,最大折叠比(r),即管直径的最大值和最小值之间的比率计算如公式(3)所示。

由于编织管的纤维在交叉点处松散地相互接触,相对移动仅受摩擦约束,因此编织管具有很大的弯曲灵活性,可以实现较大的曲率。这种灵活性有助于管通过弯曲的孔口,并在操作过程中实现“S”形曲线。为实现可调刚度,采用薄膜覆盖编织管的内外表面,形成管状密封腔(图1b)。在正常柔性状态下,机械手密封管的编织骨架占主导地位,且装置具有柔性和可折叠性。当空腔为真空时,设备进入刚性状态。在这种状态下,空气压力将膜紧紧压缩到编织管上,膜在弯曲时也会变形,从而提高机械手密封管的刚度。
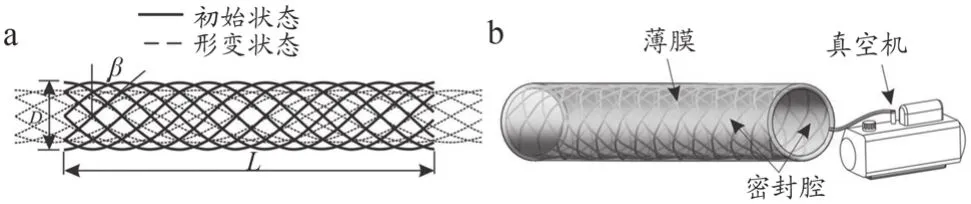
图1 密封管结构
1.2 机械手密封管制造
考虑到尼龙纤维具有良好的弹性和对3D打印模具的顺应性,以及较低的热处理温度[19],本研究选用尼龙纤维制作编织管。此外,由于聚乙烯膜易于密封,且具有较高的拉伸刚度,可为纤维提供约束力,因此使用聚乙烯膜形成空腔。机械手密封管制造过程如下:① 制作尼龙纤维编织管,形成骨架结构,并通过热封制作管状聚乙烯膜;② 将聚乙烯膜覆盖在编织管骨架内外表面,形成管状空腔结构;③ 将导管插入空腔,并用胶水密封空腔,从而保证管状空腔结构处于密封状态。
采用上述方法和真空系统制作的实验过程如图2所示。尼龙纤维和聚乙烯膜的杨氏模量均在Instron 5982实验机上进行了测试,参数如表1所示。
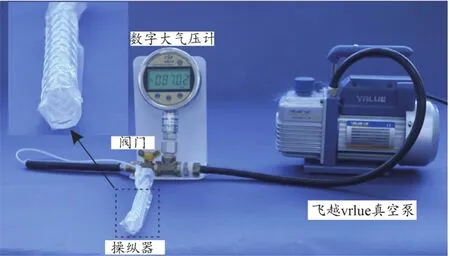
图2 机械手实验过程
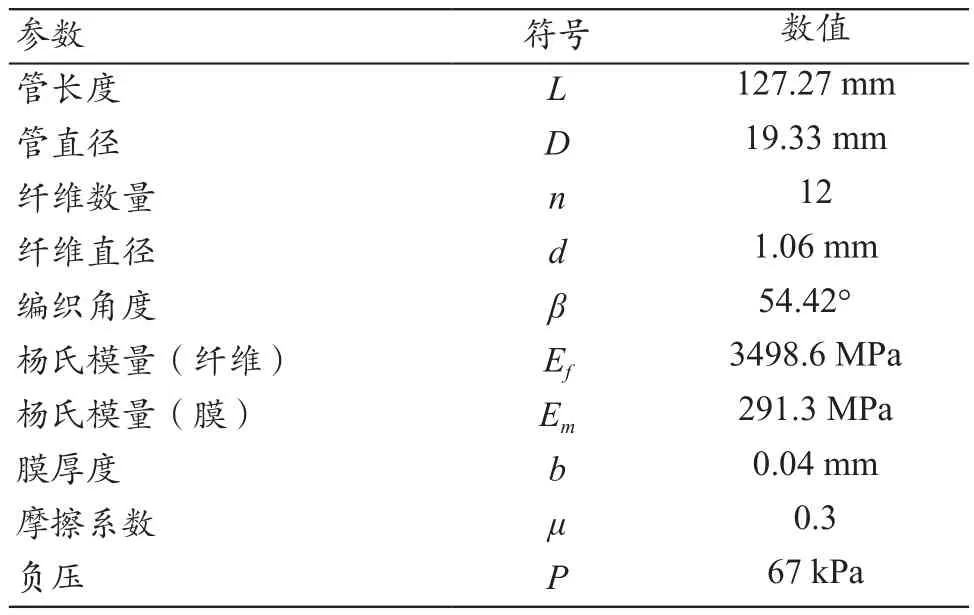
表1 机械手密封管相关参数
2 结果
2.1 实验装置及分析
为了评估机械手密封管的弯曲刚度,对物理试样进行了纯弯曲实验,从而统计设备力矩情况。弯曲实验机设计方案如图3所示,图中虚线表示的传输线由4个固定滑轮定向,当水平拉动钢丝时,纯力矩将施加到支架上,并传递到实验样品上,其中力矩计算方式如公式(4)所示。
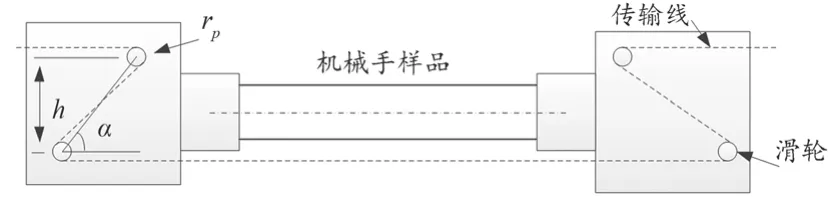
图3 弯曲实验机设计方案

式中,M为力矩;rw和F分别为传输线的半径和受力大小;γ为弯曲角度;h为两个滑轮之间的高度差;α为两个滑轮中心线连接线与水平面的夹角;rp为滑轮半径。
实验装置如图4所示,弯曲实验机放于一个平坦的平台上,试样的两端固定在弯曲实验机上。穿过弯曲测试仪的传输线一端固定,另一端连接到可移动称重传感器。车轮安装在测试仪的拐角处,以便在平台上自由移动。实验中采用位移控制,加载速率为0.3 mm/s。
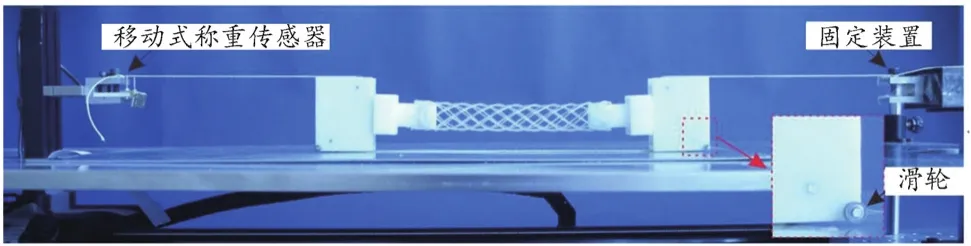
图4 机械手测试实验装置
2.2 有限元数值分析
为进一步分析密封管刚性状态和柔性状态应力分布情况,本研究使用有限元Abaqus/Explicit[20]对弯曲实验进行了数值模拟。① 建立了包括内外膜和编织管的刚性状态模型,对于柔性状态,去除两层膜,只考虑编织管,同时,利用Matlab确定编织管的纤维轨迹;② 在Matlab中获取编织管的节点和单元信息,建立孤立网格零件并导入Abaqus。编织管两端的节点分别连接到2个参考点Rp1和Rp2,作为刚体结构。膜的几何形状在Abaqus中建立,其中内膜直径略小于编织管直径,而外膜直径略大,从而避免物理干扰;③ 分别使用梁单元B31和膜单元M3D4R对编织管和膜进行网格划分。有限元分时所有参数与弯管和编织管实际参数一致(表1)。通过验证的数值模型,分析密封管在刚性状态下的刚度增强机理。图5为刚性状态下密封管和编织管的变形效果分析图,由图5可知,刚性状态中获得了测量曲率半径ρ=136.17 mm的近似纯弯曲,柔性状态中曲率半径为ρ=144.36 mm,表明,在刚性状态下,编织管在骨架上紧密压缩,密封管的变形模式不会受到显著影响,仍然可正常工作。
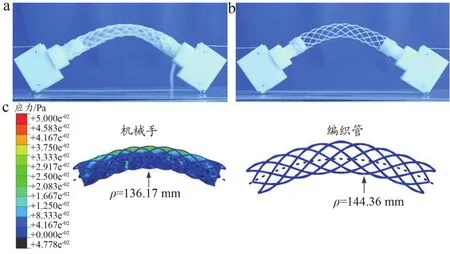
图5 刚性和柔性数值模拟结果
2.3 综合分析
图6为理论计算、数值模拟与实验在刚性状态和柔性状态力矩-弯曲角曲线。表2为当弯曲角度为60°时,刚性状态和柔性状态理论及实验力矩统计结果。由表2可知,刚性状态实验力矩为136.21 Nmm,柔性力矩为19.91 Nmm。此外,刚性状态和柔性状态下,数值计算与实验数据误差分别为14.05%和8.97%。分析原因,该误差主要是由负载测试仪中存在摩擦消耗,然而数值模拟中未考虑摩擦消耗情况。此外,数值计算得到的变形构型和力矩曲线与相应的实验结果显示出相同的趋势。因此,数值模型可作为解释刚度增强机理的可靠方法。
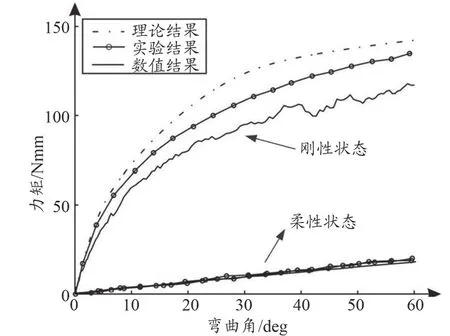
图6 刚性状态和柔性状态力矩-弯曲角曲线
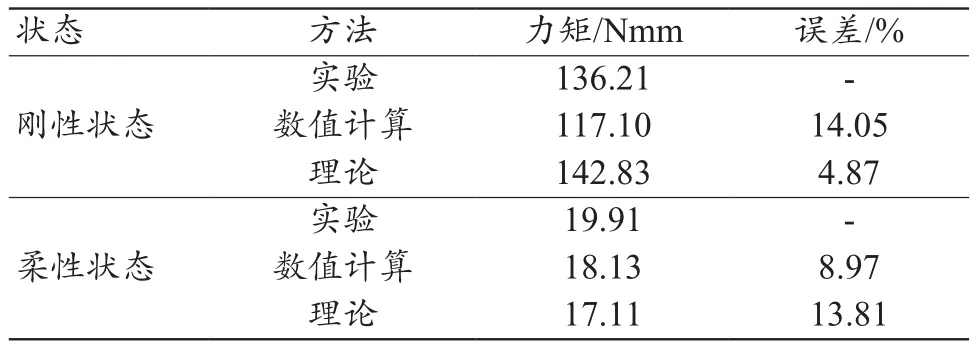
表2 刚性状态和柔性状态理论及实验力矩结果
3 讨论
本文讨论了一种用于微创手术的新型机械手密封管,对机械手密封管进行了结构设计,该密封管由编织管骨架和薄膜组成,其中编织管骨架可实现纵向柔性和径向折叠,薄膜密封管通过负压可调刚度。在正常柔性状态下,机械手密封管的编织骨架占主导地位,且装置具有柔性和可折叠性。当空腔为真空时,设备进入刚性状态,从而满足机械手刚度要求。为验证所提机械手密封管有效性,通过有限元数值分析,刚性状态中获得了测量曲率半径ρ=136.17 mm的近似纯弯曲,柔性状态中曲率半径为ρ=144.36 mm。表明,在刚性状态下,编织管在骨架上紧密压缩,密封管的变形模式不会受到显著影响,仍然可正常工作。通过综合分析,当弯曲角度为60°时,刚性状态实验力矩为136.21 Nmm,柔性力矩为19.91 Nmm。
本文中的新型机械手与仿生外骨骼机械手[8]相比,经有限元数值分析表明受力较低,变形时机械臂不需要承受过大负载。与相变材料[9]设计的机械手相比,本文所提新型机械手及其密封管通过负压调节,激活时间较低。与气动和液压机械手[10-11]相比,所提新型机械手及其密封管具有良好的弹性和较高的拉伸刚度,可实现一定程度上的精确定位及精细控制。综上,本研究设计的新型机械手及其密封管具有有效性及实用性,该设备可为微创手术机械手设计及应用提供一定借鉴,具有一定推广价值。未来可进一步对机械手精确定位及精细控制系统进行设计分析,从而进一步增强机械手的实用性。
4 结论
本文设计了一种用于微创手术的新型机械手,并对机械手设计进行了研究。数值计算得到的变形构型和力矩曲线与相应的实验结果显示出相同的趋势,表明本研究设计的新型机械手及其密封管具有一定的实用性。
