CO-OFDM系统中的相位噪声补偿算法
2022-10-26袁建国张文静李阳旭
袁建国,张文静,李阳旭
(重庆邮电大学 通信与信息工程学院,重庆 400065)
0 引 言
相干光正交频分复用(coherent optical orthogonal frequency division multiplexing, CO-OFDM)被认为是宽带光通信中最有前途的技术之一[1]。它结合了正交频分复用OFDM技术、相干检测技术和光通信技术[2],能有效地对抗色度色散(chromatic dispersion, CD) 和偏振模色散(polarization mode dispersion, PMD),并且具有频谱效率高等优点[3-5],但相位噪声的产生会破坏各个子载波的正交性,导致系统性能变差。因此,对相位噪声抑制算法的研究具有重要的意义。
相位噪声对CO-OFDM系统中的影响主要有2个方面:①相位噪声的零阶频谱分量引起的CPE;②非零阶频谱分量引起的ICI[6-7]。CPE会导致星座图的旋转;ICI导致星座图的发散,因为ICI对系统产生的影响是随机的,所以对ICI的抑制更加困难。线宽较小时,对系统产生主要影响的是CPE,而在大线宽下对系统产生主要影响的是ICI。针对以上2个方面,不少学者提出了许多算法来补偿相位噪声。文献[8]对相邻的OFDM进行线性内插,抑制了部分载波间干扰。文献[9]在文献[8]的基础上利用循环前缀对OFDM信号进行插值,提高了估计的精度。文献[10]利用线性插值伪导频辅助正交基扩展(linearly interpolation pilot-aided orthogonal basis expansion, LI-PS-OBE)相位噪声抑制,利用线性插值计算相位角替代正交基展开中对一个符号进行估计,能更好地实现相位跟踪。文献[11]利用线性插值与次符号结合的方法对CPE和ICI抑制。文献[12]通过增加线性插值的点数来降低误码率。文献[13-14]通过利用扩展卡尔曼滤波(extended Kalman filter,EKF)算法对残余的相位噪声进行了更精细的补偿。EKF算法由于其采用一阶泰勒级数展开来逼近真实值,这会带来较大的线性化误差,有时会导致结果的发散[12]。文献[15]采用自适应扩展卡尔曼滤波(adaptive extended Kalman filter,AEKF)算法,动态补偿相位噪声。文献[16]采用无迹卡尔曼滤波(unscented Kalman filter, UKF) 算法对ICI相位噪声进行精细补偿,但是在线宽较大时,UKF参数的选取会造成滤波不稳定,从而影响滤波效果。文献[17]采用容积数值积分准则的CKF算法对相位噪声进行了精细补偿,容积卡尔曼滤波具有数值精度高,稳定性强的特点,从而取得了良好的滤波效果。
本文在此基础上提出了一种CP插值结合CKF的相位噪声补偿算法。首先利用CP进行线性内插,然后对初步补偿后的信号进行预判决和次符号的划分,最后利用CKF实现对残余相位噪声的补偿。
1 相位噪声系统模型
在CO-OFDM通信系统中,理想状态下即信号不受任何噪声的干扰,OFDM信号x(n)在接收端的时域表达式为
y(n)=x(n)⊗h(n)ejφ(n)+w(n)
(1)
(1)式中:⊗符号表示卷积运算;h(n)为信道冲激响应;w(n)为均值为0的加性高斯白噪声。φ(n)表示激光器相位噪声,对发送信号表现为乘性干扰,符合维纳过程,可表示为
φ(n)=φ(n-1)+Δφ
(2)
(2)式中:Δφ表示的是相邻采样点之间的相位噪声增量;均值为0,方差为2πΔf/fs。Δf表示发送端和接收端的激光器线宽总和,fs是OFDM符号的模数变换的采样频率[17]。经快速傅里叶变换(fast Fourier transformation, FFT)后,第k个子载波上接收信号在频域的表达式为
Y(k)=X(k)H(k)I(0)+

(3)
(3)式中:i=1,2,3,…,N-1,N为子载波的总数,I(0)系数作用于全部的子载波上,对每一个OFDM符号的影响是相同的,称为CPE;第2项是ICI相位噪声,它的产生是随机的。
2 一种新的相位噪声补偿算法
针对CO-OFDM系统提出了一种CP插值与CKF结合的相位噪声补偿算法,算法流程图如图1所示。
2.1 CPE噪声补偿

(4)
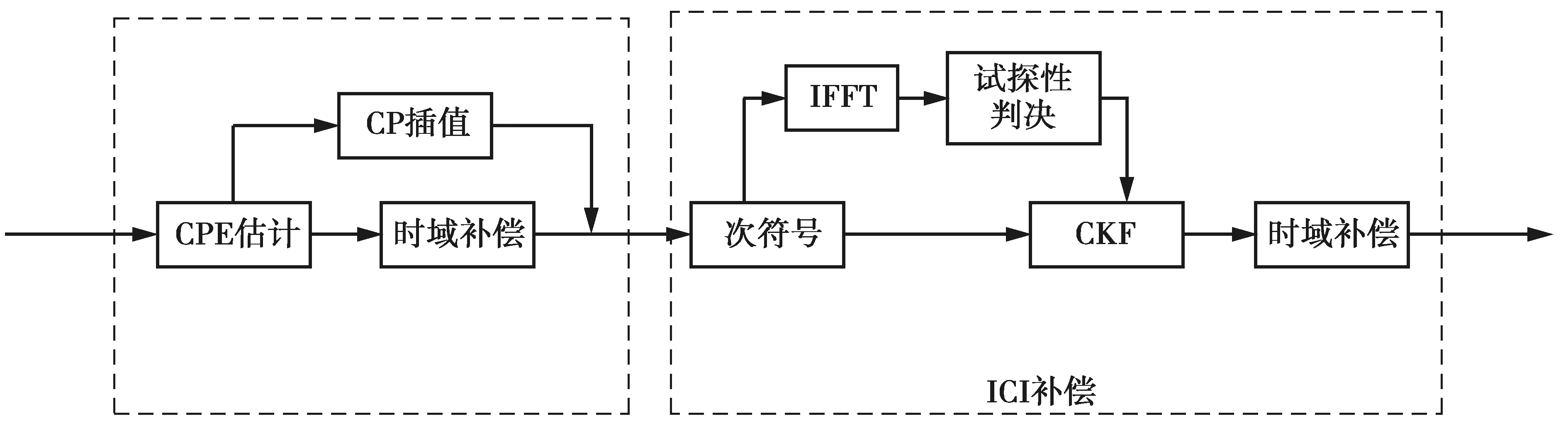
图1 CP插值结合CKF的算法结构框图Fig.1 Block diagram of algorithm based on the combination of the CP interpolation with the CKF
(5)
(5)式中:Ng表示循环前缀;N表示子载波的总数。在线宽较小时,该方法可以有效地估计相位噪声;但是在线宽较大时,相位噪声起伏较大,仅通过一个有效的估计值已经无法准确地估计相位噪声,所以使用CP插值算法对相位噪声进行补偿。
2.2 CP插值算法
CP插值算法通过增加相位噪声的插值点数加大对相位噪声的消除力度,由(4)—(5)式可求得第m个OFDM符号的第Ng个采样点与Ng+N个采样点的相位噪声ϑm,1和ϑm,2,其表达式为
(6)
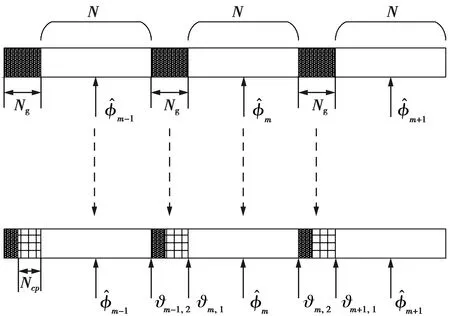
图2 CP插值算法与普通线性插值点的位置对比Fig.2 Comparison of the position between the CP interpolation algorithm and ordinary linear interpolation points

(7)
2.3 ICI噪声补偿
CP插值算法能够消除CPE,但是随着线宽的增大,ICI相位噪声占主要部分,CP插值算法补偿的精度不够,下面结合次符号[11]和CKF对信号进行更进一步补偿。

(8)
(8)式中:FH表示进行快速傅里叶逆变换;Δξ是试探性判决的判决误差[17]。将试探性判决后的第m个信号分割成i个子符号,每个次符号对应长度为L,L=N/i,然后利用最小平方误差(least squares, LS)准则估计出每一对子符号的平均相位偏差Φm,i,表示为
(9)
利用计算得到的Φm,i对循环线性插值补偿后的OFDM符号rm,n进行时域次符号处理。
(10)
φm,n=φm,n-1+wm,n-1
(11)
(12)

对CKF的相位噪声值和协方差值进行初始化。
(13)
(14)
将上一采样点的相位噪声与协方差值进行奇异值分解,获得容积点ψm,(n-1,q),状态容积点ψm,(n/n-1,q),即
Um,n-1Sm,n-1Vm,n-1=svd(Pm,n-1)
(15)
(16)
ψm,(n/n-1,q)=ψm,(n-1,q)
(17)
(18)
(19)
Um,n/n-1Sm,n/n-1Vm,n/n-1=svd(Pm,n/n-1)
(20)

(21)
(22)
根据得到的容积点计算测量预测值、新息方差值和协方差估计值,表达式为
(23)
(24)
(25)
计算CKF的增益em,n,其表达式为
(26)
(27)
(28)
通过对CPE相位噪声补偿的CP-LI-CPEC算法和对ICI相位噪声补偿的SCKF[17]算法得到最终CP- LI-SCKF相位噪声补偿算法,最终补偿后的信号输出为
(29)
3 仿真结果和分析
采用蒙特卡洛仿真来验证CP插值结合CKF算法的相位噪声补偿算法的性能。仿真参数设置如下:OFDM符号数为10 000,子载波N的个数为128,CP的长度为N/4=32,基带采样频率为20 GHz,采用16-QAM调制,导频数量为4,容积点的个数为2。
图3是当信噪比为20 dB,激光线宽在1 500 kHz时,每一步补偿后信号的星座映射图。信号经过CP插值算法补偿后表示为CP-LI-CPEC,经过次符号补偿后的信号为CP-LI-SCPEC,最终经过CKF补偿后的信号为CP-LI-SCKF,由星座图可以看出,经过CP插值算法补偿后,星座收敛了一部分,但是信号还有明显的扩散现象,经过次符号处理后,发散程度有所收敛,但是还存在部分残余的ICI相位噪声,经过CKF补偿后的星座图信号更加集中,达到了很好的补偿效果。
图3 相位噪声补偿算法的星座图Fig.3 Constellation diagram of the phase noise compensation algorithm
图4是激光线宽为800 kHz时所提出的算法与各个算法的信噪比与误码率图,对比算法是文献[9]中的一阶与二阶算法分别表示为Linear-LI与Linear-LI-EKF,文献[11]的算法表示为LI-SCPEC,文献[15]的算法表示为AEKF,由图4可以看出,在误码率为10-4时,本文所提出的一阶算法CP-LI-CPEC比Linear-LI提高了1.5 dB;在误码率为10-6时,本文提出的二阶算法CP-LI-SCKF比LI-SCPEC、Linear-LI-EKF、AEKF分别提高了1、0.4、2.1 dB,且LI-SCPEC算法在误码率为10-6时出现了严重的错误平层,在其错误平层区域,该LI-SCPEC算法的误码率性能随着信噪比的增加没有太大的改善,影响了该算法的性能。由此可知,本文所提出的算法能有效降低错误平层,且在16 dB时误码率达到了10-7数量级,有效提升了系统的性能。
图5是激光线宽为1 500 kHz时所提出的算法与各个算法的信噪比与误码率图,由图5可知,LI-SCPEC算法在16 dB附近就出现了严重的错误平层,说明此算法在线宽较大时性能较差。CP-LI-CPEC与Linear-LI算法在大线宽情况下表现较差,不能满足系统在大线宽下的需要。CP-LI-CPEC经过CKF滤波处理后,进一步消除了CPE与ICI,提高了补偿的精度,对图5进行仿真分析,在误码率为10-5时,CP-LI-SCKF比AEKF提高了2.6 dB,比Linear-LI-EKF提高了1.0 dB,在误码率为10-6时,CP-LI-SCKF比Linear-LI-EKF提高了2.4 dB。
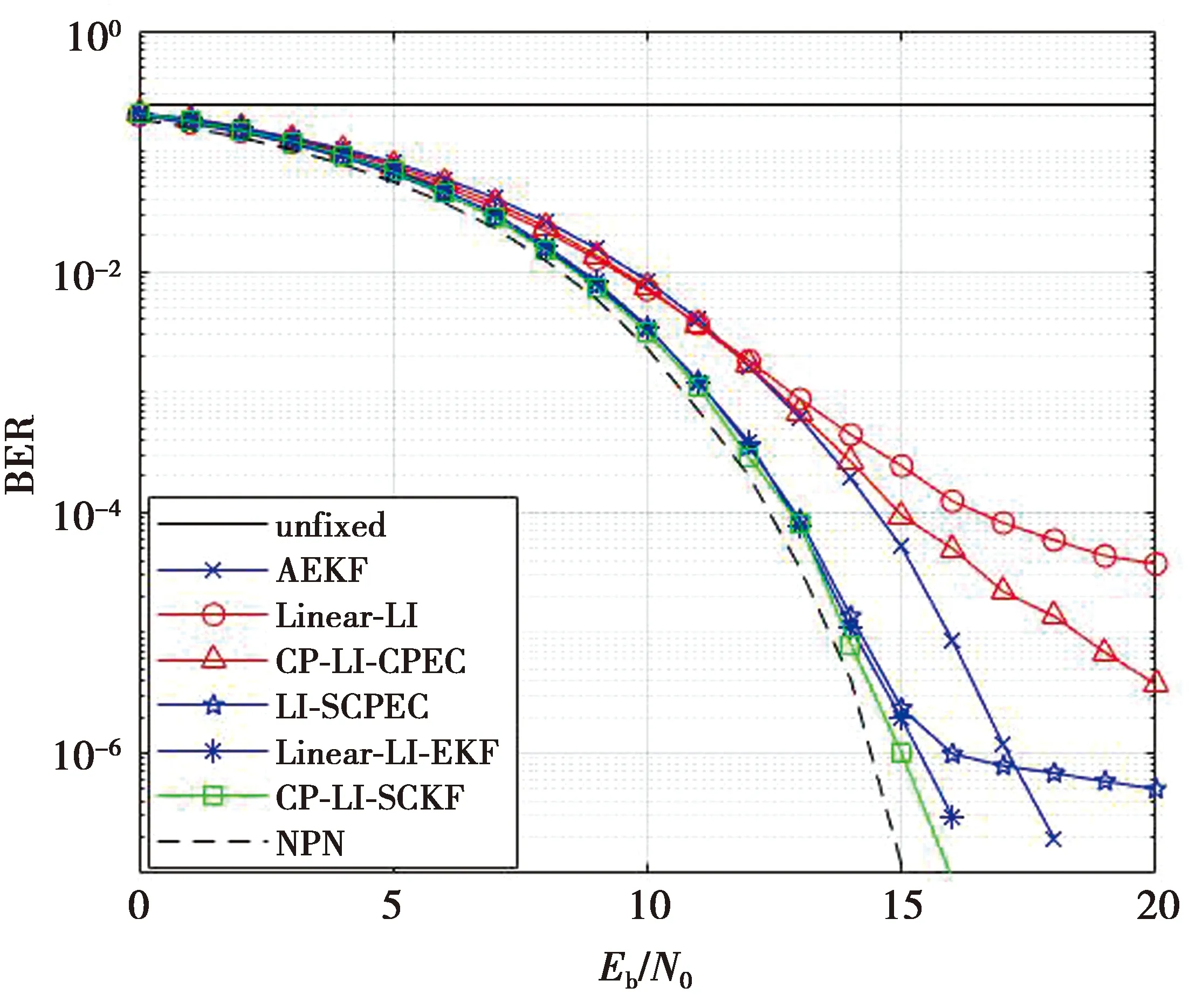
图4 激光线宽为800 kHz各个算法的信噪比与 误码率图Fig.4 SNR & BER graph ofeach algorithm with a laser linewidth of 800 kHz
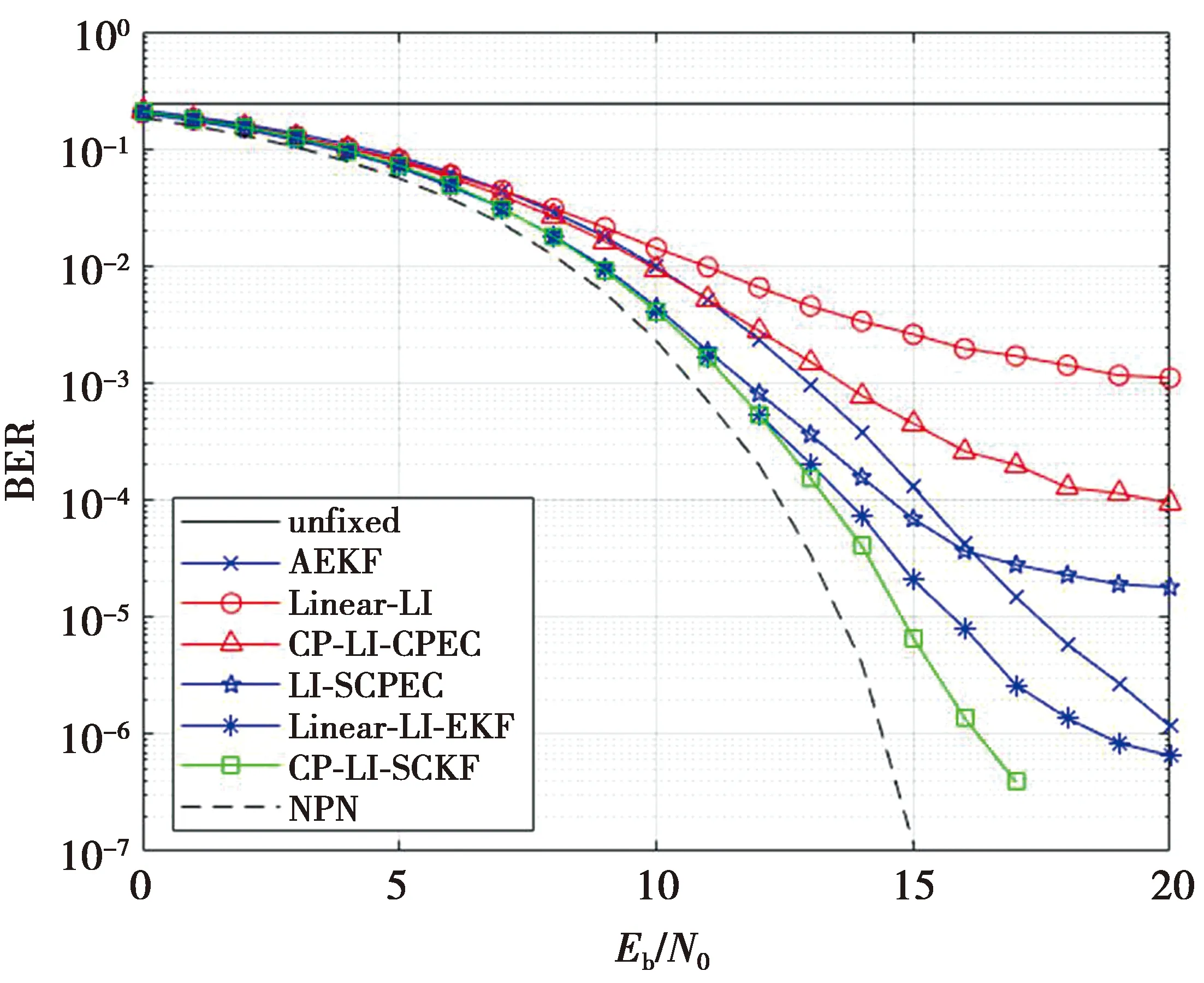
图5 激光线宽为1 500 kHz各个算法的信噪比 与误码率图Fig.5 SNR & BER graph of each algorithm with a laser linewidth of 1 500 kHz
4 结 论
本文首先针对相位噪声对CO-OFDM系统的影响提出了一种CP插值结合CKF算法的相位噪声补偿算法,该算法首先利用CP插值法对CPE相位噪声进行补偿,然后再利用次符号处理消除了部分残余的ICI相位噪声,最后利用CKF进行剩余的ICI相位噪声消除。通过对比已有的算法可知,该算法能有效降低系统的误码率,保证了信息传输的有效性,且带宽越大,系统受到的相位噪声越严重,该算法在1 500 kHz带宽下仍有很好的误码率性能,说明此算法能改善大线宽情况下CO-OFDM系统对激光器线宽的容忍度,提高系统的性能。