基于制动能量回馈装置的城轨牵引供电系统谐波抑制方法
2022-10-26戎士洋曾四鸣柴语兵肖国春
周 文,戎士洋 ,曾四鸣,柴语兵,肖国春
(1.国网河北省电力有限公司电力科学研究院,河北 石家庄 050021;2.西安交通大学电气工程学院,陕西 西安 710049)
1 引言
随着城市建设的发展,城市轨道交通(以下简称城轨交通)在城市化进程中起着越来越重要的作用。截至2020年底,我国共有45个城市,开通城轨线路244条;新增运行线路36条,中心城市轨道交通客运量占公共交通客运总量出行比例38.7%,部分城市轨道交通客运量占公共交通出行比例超过50%[1]。
城轨交通的快速增长,其电力消耗是巨大的。据统计,2020年城轨交通总能耗172.4亿kW·h,其中牵引能耗84亿kW·h,同比增长6.3%[1]。在城轨交通系统中,根据线路条件的差异,牵引负荷用电量已占到总用电量40%~70%[2]。由于城轨交通站间距离较小,车辆运行时启停频繁,制动产生的电能可高达牵引电能的40%。未能被相邻车辆吸收的电能占其牵引电能的15%以上[3]。因此,如何进一步提高城轨交通再生制动能量的回馈效率,实现节能减排、绿色发展已成为一个研究热点[4-7]。
同时,大规模城轨交通负荷的接入,给城市配电网电能质量带来了不可忽视的影响,主要体现在:机车冲击性负荷波动造成的网侧电压波动,大量整流设备、非线性负荷导致的谐波等问题[8]。同时随着运行线路逐年增加,整流机组大量接入,网侧电流出现了不可忽视的特征谐波(以23次和25次为主)与非特征谐波。以西安地铁和杭州地铁为例,均预测出现110 kV电网23次和25次电网谐波超标的问题[9],一些城市地铁配电网的实测也出现了此问题[10]。非线性负载的大量引入,导致谐波水平越来越高,可能导致配电网产生25%以上的电能损耗[11]。如何减少城轨交通负荷对城市配电网电能质量的影响、提高城市配电网的可靠性意义重大。
本文将城市轨道交通中制动能量回馈与谐波电流抑制统一考虑,利用其设置的制动能量回馈装置,在实现其基本的制动能量回馈功能基础上,使其兼备治理配电网电能质量的能力。这样提高了制动能量回馈装置的利用率,降低了城市轨道交通电能质量治理设备的造价。
城轨交通的制动能量回收,主要有储能型和逆变回馈型两种方式[3,12-16];逆变回馈方式中,按照逆变回馈位置或电压等级不同,又分为低压馈入、高压馈入和通过24脉波整流机组变压器的二次绕组馈入等方法[2,12]。
对比各逆变回馈装置方案,文献[2,12]提出了一种双线圈接入方式,逆变回馈型再生制动装置采用两个逆变器,利用两个双线圈变压器隔离,通过整流机组三绕组变压器的两个副边实现能量回馈功能,维持直流母线电压稳定。该方法的能量回馈路径最短、损耗最小;对于牵引变压器来说,存在能量的回流(馈)抵消,一定程度上可以降低整流变压器容量;并且能够实现整流机组三绕组变压器两个副边的功率平衡;但系统造价高、控制复杂。为了简化逆变回馈系统的结构,降低回馈装置的造价,也仅可以通过整流机组的一个副边绕组(如Y绕组,有效值1 180 V)将逆变的电能回馈电网,这或许是一个比较经济的方案[3],多个公司提供的城轨交通制动能量回收设备采用了这种电路。本文在这种馈入整流机组的一个副边绕组系统中,开展了基于制动能量回馈装置的城轨交通配电系统谐波电流有源抑制方法的研究。
将城轨交通中制动能量回馈与谐波电流抑制问题统一考虑,本文以中压(35 kV)配电网的谐波电流治理为目标,讨论了逆变回馈装置与24脉波整流机组三绕组移相变压器间的谐波电流传递规律,提出了一种基于逆变回馈装置和矢量谐振控制器的电网谐波电流闭环抑制与直流母线电压(能量回馈)控制相结合的方法,可以方便地实现有源滤波(Active Power Filter, APF)功能与制动能量回馈功能的切换。当牵引系统直流母线电压在规定范围内时,回馈装置作为有源滤波器使用,用于抑制列车起动、牵引和惰行等过程中产生的谐波电流,改善配电网的电能质量;当牵引系统直流母线电压超过设定阈值时,逆变回馈功能启动,转移列车制动过程中产生的电能。多工况仿真验证了所提出方案的有效性和正确性。
2 逆变回馈装置抑制电网谐波电流的方案与控制策略
采用通过24脉波整流机组的一个副边绕组将逆变电能回馈电网,系统主电路如图1所示。图1中,35 kV中压电网通过24脉波整流变压器向直流牵引网供电;移相变压器的副边为Y/Δ接法,两个移相变压器构成的整流机组间再错开15°,达到对直流牵引网供电24脉波整流的目的;移相变压器副边额定电压为1 180 V,通过二极管整流使牵引网获得1 500 V直流供电; 再生制动能量回馈装置的交流侧借助隔离变压器连接至移相变压器的一个副边Y绕组,直流侧通过支撑电容并联在牵引网上。
2.1 逆变回馈装置系统方案
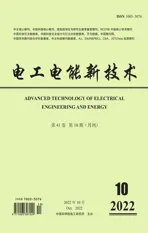
本文讨论的逆变回馈装置除用于实现能量回馈外,还具有(中压)电网侧电流谐波抑制的能力。所以,逆变回馈装置控制系统主要包含能量回馈的基波电流控制环和电网侧电流谐波抑制的谐波电流控制环,控制系统总体框图如图2所示。图2中,分别采集电网侧电压usabc与电流isabc,接回馈装置的整流变压器输出绕组的三相电压umabc与电流icabc;通过锁相环(Phase-Locked Loop, PLL)获取电网侧电压和整流变压器输出侧电压的相位θs和θc;列车牵引状态,整流变压器输出电流时开关S闭合,谐波电流控制环工作,逆变回馈装置作有源滤波用;列车制动、直流母线电压泵升达到逆变回馈阈值,整流变压器输出电流为零时,开关S断开,逆变回馈装置回馈电能,稳定直流母线电压。
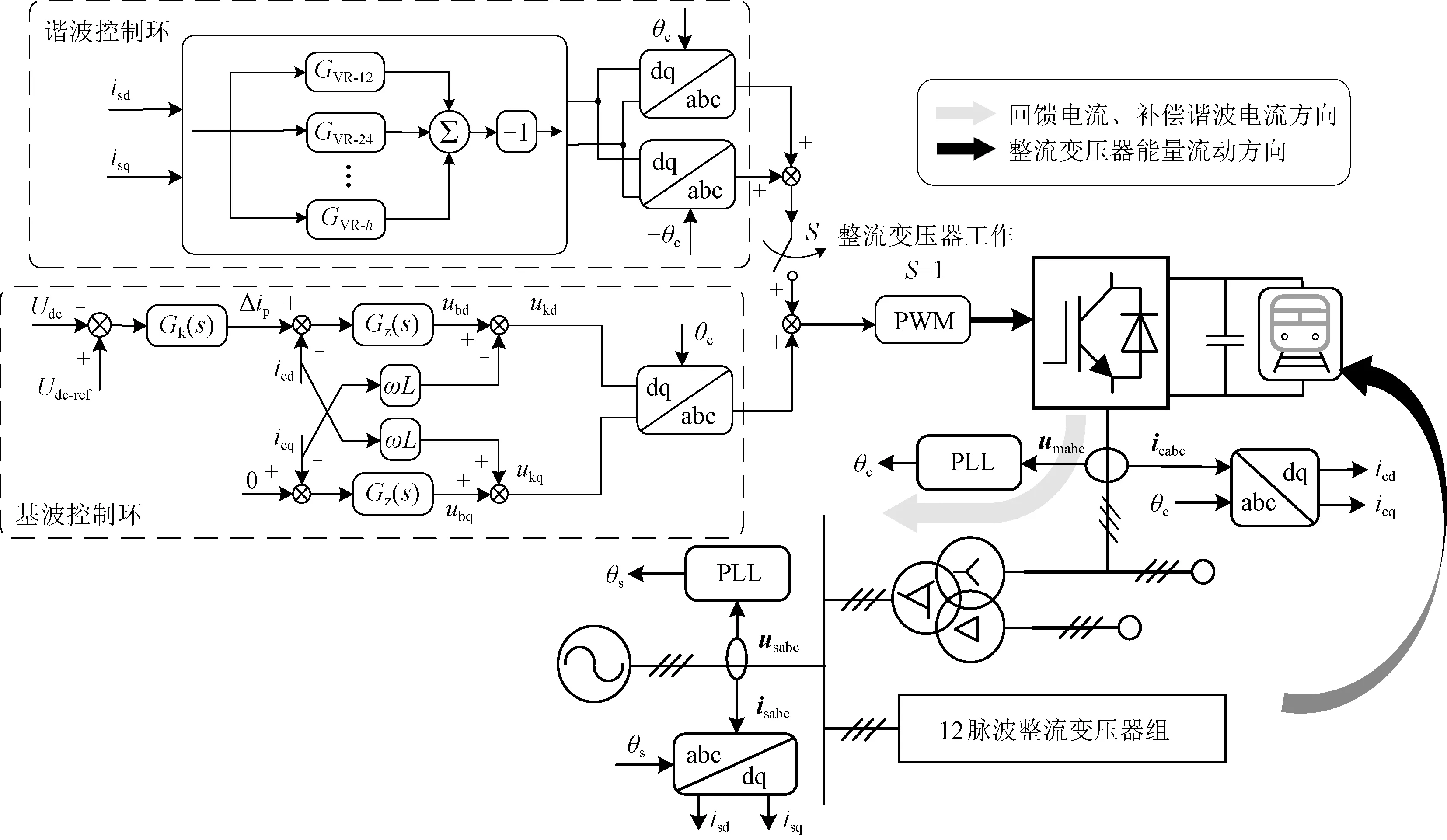
图2 能量回馈装置的系统控制框图
为了减少逆变回馈装置长期对牵引网直流母线电压稳压控制带来的能量损耗,基波电流控制环主要用于列车制动能量回馈时的直流母线电压稳压,超过直流母线电压设定的阈值才投入工作;直流母线电压未超过设定的阈值,且整流变压器工作(列车处于牵引状态),电网存在谐波电流时,谐波电流控制环才投入工作,这时逆变回馈装置作APF用。两种工作模式的控制策略及其切换方法将在2.2节、2.3节阐述。
2.2 逆变回馈装置控制策略
单独研究能量回馈装置,其等效示意图如图3所示。左侧为城轨交通负载,直流母线采用大电容支撑,回馈装置为三相全控桥,输出侧采用L型滤波器。
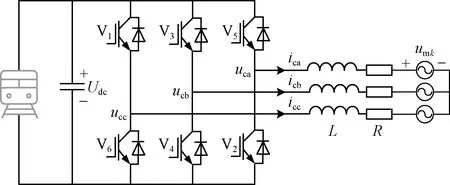
图3 逆变回馈系统等效电路图
设整流变压器副边Y绕组三相电压对称,其幅值为Um,电网的基波角频率为ω,直流母线电压为Udc,三相电压用umk(k=a,b,c)表示,有:
(1)
设L和R为逆变器输出侧的滤波电感与等效电阻(包括滤波电感的等效电阻),uck、ick(k=a,b,c)分别为逆变器输出电压、电流,由基尔霍夫电压定律,得到以下方程:
(2)
三相静止坐标下的电压和电流变换到dq同步坐标系下,其变换式为:
(3)
设能量回馈装置切入时,电感中无电流,即ick(0)= 0,式(2)经拉氏变换并整理得:
(4)
dq同步坐标系下,式(4)变为:
(5)
2.2.1 谐波电流控制策略
按照图2所示的控制系统图,本文研究对象的谐波电流主要来源于电力牵引用24脉波整流机组,也可包含城轨交通站配电设备产生的谐波电流。利用系统设置的电能回馈装置来进行谐波电流治理,需要通过两级变压器传输才能实现;采用检测负载侧谐波电流的系统(开环)控制方法实现困难,因此,本文采用检测电网侧电流的闭环控制方法,对电网侧谐波电流实现闭环控制[17-21]。这里研究的回馈装置的APF功能只考虑消除23次、25次及以下的谐波,并不需要对所有谐波电流进行抑制,所以,选取矢量谐振(Vector Resonant, VR)(或称矢量比例积分(Vector Proportional Integral,VPI)调节器)的控制方法[20]。
为了减少抑制谐波所需VR控制器的数量,达到采用一个谐振频率的VR控制器能够消除两种(次)谐波的目的[19,20],可以在同步坐标系下进行VR控制。如:若在同步坐标系下采用2个VR控制器并联消除12次和24次谐波电流,相当于静止坐标系下消除了11次、13次、23次 和 25次谐波电流。VR控制后的输出量再经过dq逆变换,在静止坐标下对控制信号调制后控制主电路工作。
静止坐标系下,VR控制的表达式为[19,20]:
(6)
式中,kph为VR控制器的比例系数;kih为VR控制器的积分系数;h为需要抑制的谐波次数。由于VR控制的引入可以用来抵消被控对象(进线电抗)的极点[18-20]。由式(5),dq同步坐标系下被控对象的传递函数为:
(7)
为了使VR控制器的零点与被控对象的极点对消,可以得到:
(8)
因此, 式(6)变为:
(9)
由于电网的谐波电流补偿是通过回馈装置实现的,是属于对谐波电流的闭环控制;采用VR控制也不需对所抑制次数的电流谐波进行分离。所以,考虑基波电流影响的系统谐波电流控制框图如图4所示。GVR-h(s)为VR控制器传递函数,Gz(s)为基波电流内环控制器,Δip为基波电流参考信号,il为负载电流,is为电网电流,ic为装置输出电流,uo为装置输出端口电压。
图4 谐波电流控制框图
2.2.2 VR控制器参数设计
受到电流采样延迟、运算延迟、PWM变流器零阶保持特性的影响,一般认为延迟长度为1.5个采样周期。即:
Gd(s)=e-1.5Tss
(10)
式中,Ts为控制系统的采样周期。
因此, 考虑控制延迟的谐波电流控制框图如图5所示。
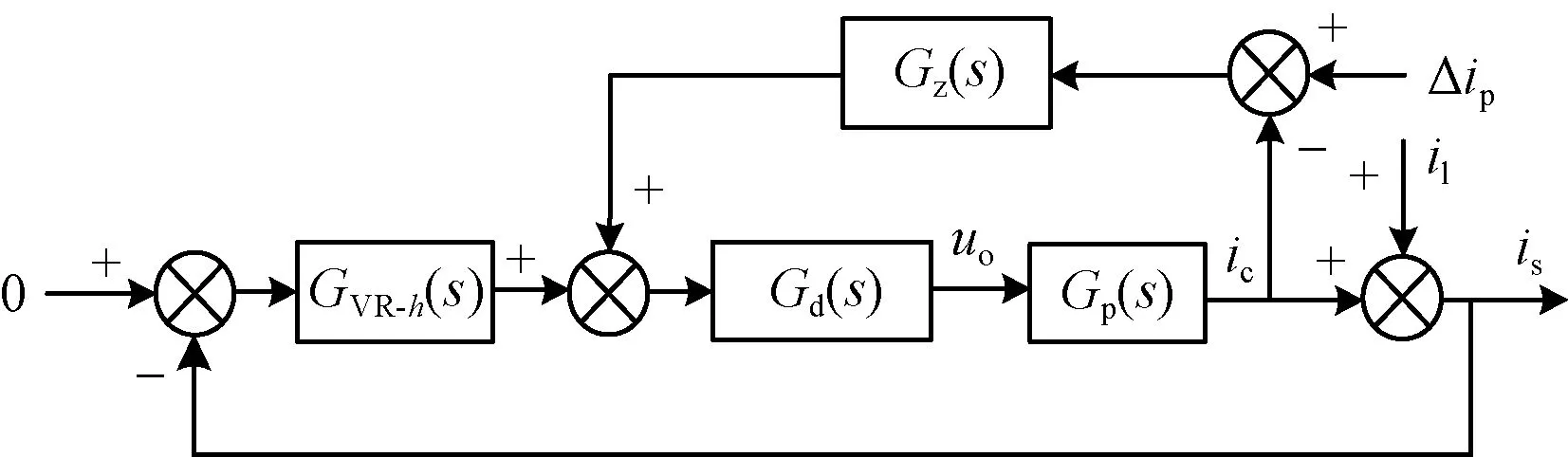
图5 考虑控制延迟的谐波电流控制框图
此时,装置输出电流ic对电网电流is的传递函数如式(11)所示。
(11)
负载电流il对电网电流is的传递函数为:
(12)
基波电流内环控制器为:
(13)
式中,kip和kii分别为电流环PI控制的比例和积分系数。
开关频率与采样时间的关系为fs=1/Ts,对延时环节采用二阶Pade近似,有:
(14)
将式(7)、式(9)、式(13)和式(14)代入式(11)得到传递函数Gcd(s)如式(15)所示。将式(15)代入式(12)可以获得关于谐波电流的闭环传递函数。
(15)
令h=24(对应1 200 Hz谐振频率),将表1中系统主电路参数代入就可得到系统稳定时控制器参数kph、kip和kii取值范围。综合考虑基波电流内环的跟踪性能和动态性能,选择kip=0.25和kii=0.01。该参数与下文逆变回馈时电流内环控制器的参数相同。
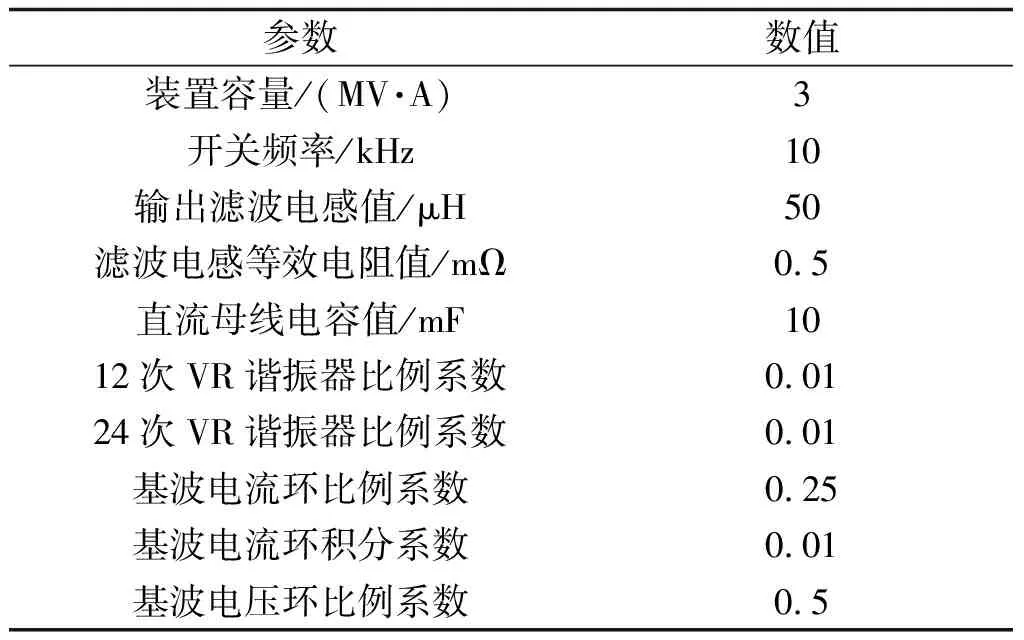
表1 回馈装置及控制参数
不同kph取值时对不同频率谐波选择性能(即频率特性)的影响如图6所示。

图6 单VR控制时不同kph的频率特性
由图6 可知,kph愈小,抑制谐波电流次数(频率)的选择性愈好;但电流环的控制带宽就愈窄,响应速度下降。若kph较大,补偿后的闭环Bode图出现尖峰,且该尖峰随着kph的增加呈现带宽扩大、中心频率向高频移动的趋势,可能造成非特征次谐波放大。因此kph的选择在综合考虑选择性、带宽、Bode图尖峰、频率等因素后,1 200 Hz谐振频率的VR控制器比例系数选取kph=0.01。
将两个VR控制器并联组合,h=12和24(对应谐振频率分别设置在600 Hz和1 200 Hz),静止坐标下可以同时抑制11次、13次和23次、25次谐波电流),此时VR控制器的传递函数为:
(16)
将式(7)、式(13)、式(14)和式(16)代入式(11),利用式(12),类似地,将表1中系统主电路参数代入就可得到系统稳定时控制器参数kph、kip和kii的取值范围。综合考虑基波电流内环的跟踪性能和动态性能,kip和kii选择与单VR控制时的参数相同。
双VR控制器并联接入的闭环频率响应特性图如图7所示。
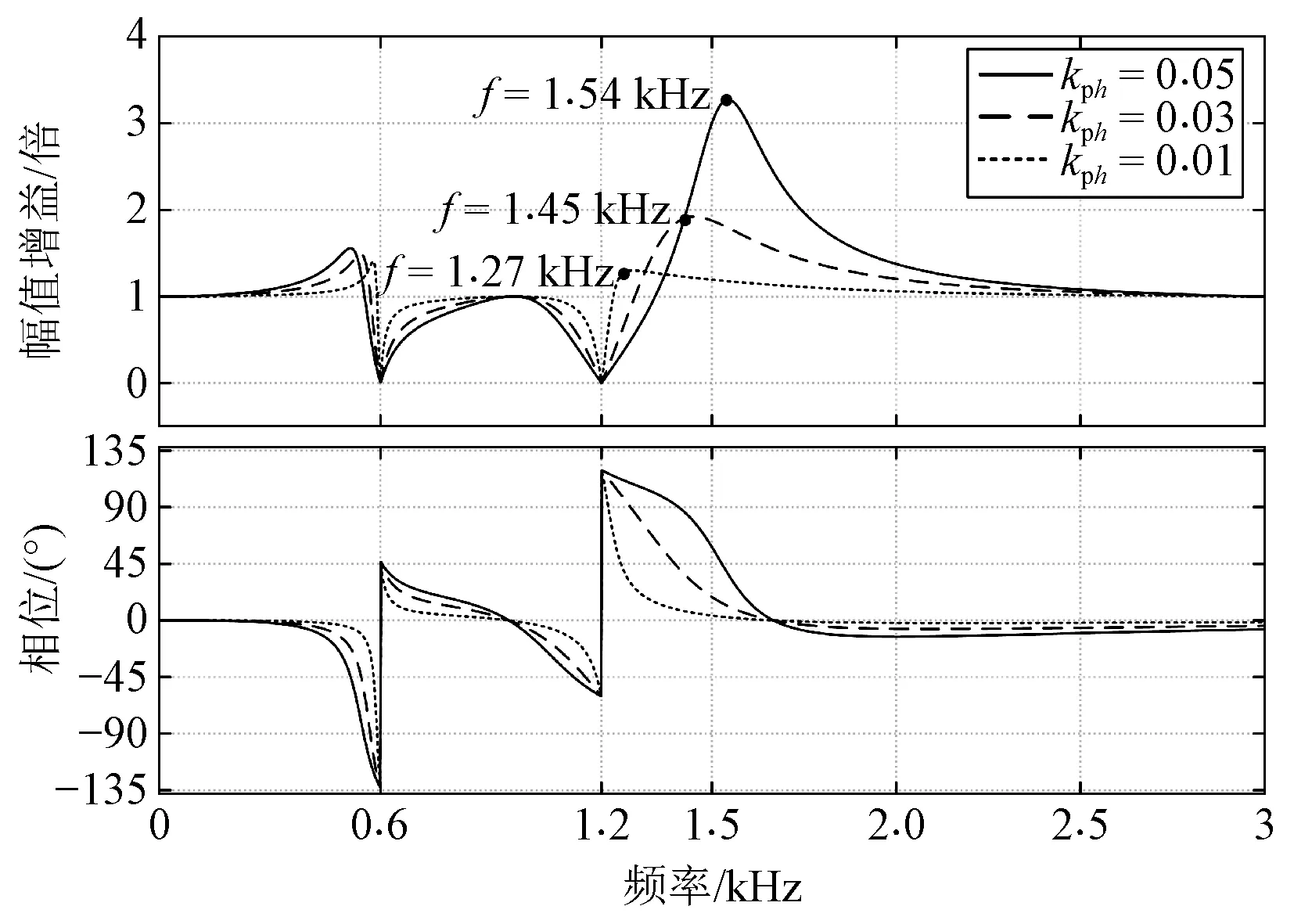
图7 双VR控制时不同 kph 的频率特性
从图7中可以看出,调节kph值,当kph合适时,两VR控制器互相影响较弱,位于两谐振频率之间的谐波也能等幅值、无相差跟踪。kph越大,频带重叠越大,可能造成非指定次谐波放大。因此在引入多个VR控制器时,kph应尽量取小些。综合考虑双谐振频率的VR控制器比例系数仍选取kph= 0.01。
2.3 逆变回馈装置的控制
将式(2)变换至基波频率下的dq坐标系为:
(17)
由式(17)可知,在dq坐标系下,d轴与q轴电流存在耦合。为了使装置输出电压能够直接控制输出电流,令基波控制环输出电压满足:
(18)
式中,ubd与ubq为基波电流内环输出参考电压,定义ukd=ubd-ωLicq,ukq=ubq+ωLicd。由于直流侧电压控制属于有功控制,电压环输出的有功参考电流与实际电网电流变换后的d轴电流比较;单位功率因数回馈时q轴电流给定设为0。
为了减小逆变回馈装置的容量和避免交流电网的能量通过整流机组和回馈装置流回交流电网造成不必要的损耗,逆变回馈装置仅仅用于列车制动能量的回收、限制直流母线电压,所以,逆变回馈装置的控制策略是:只有当列车制动引起牵引系统直流母线升高到一定设定阈值时逆变回馈装置才投入运行进行制动能量的回收、限制直流母线电压的升高。所以,对直流母线电压的控制,采用比例调节器和逆变电流限幅控制,比例调节器系数为kup,即:
Gk(s)=kup
(19)
其输出的最小限幅值设为0,确保直流电压Udc高于直流电压的设定值Udc-ref时逆变回馈装置才工作;其输出的最大限幅值也就是逆变电流的限幅值由回馈装置的容量确定。
由于基波频率下dq坐标系的电网电流基波分量为直流量,因此对电流内环采用PI控制,如式(13)所示。基波控制框图如图8所示,基波控制输出信号与谐波控制输出信号经逆变换、PWM调制驱动主电路工作。
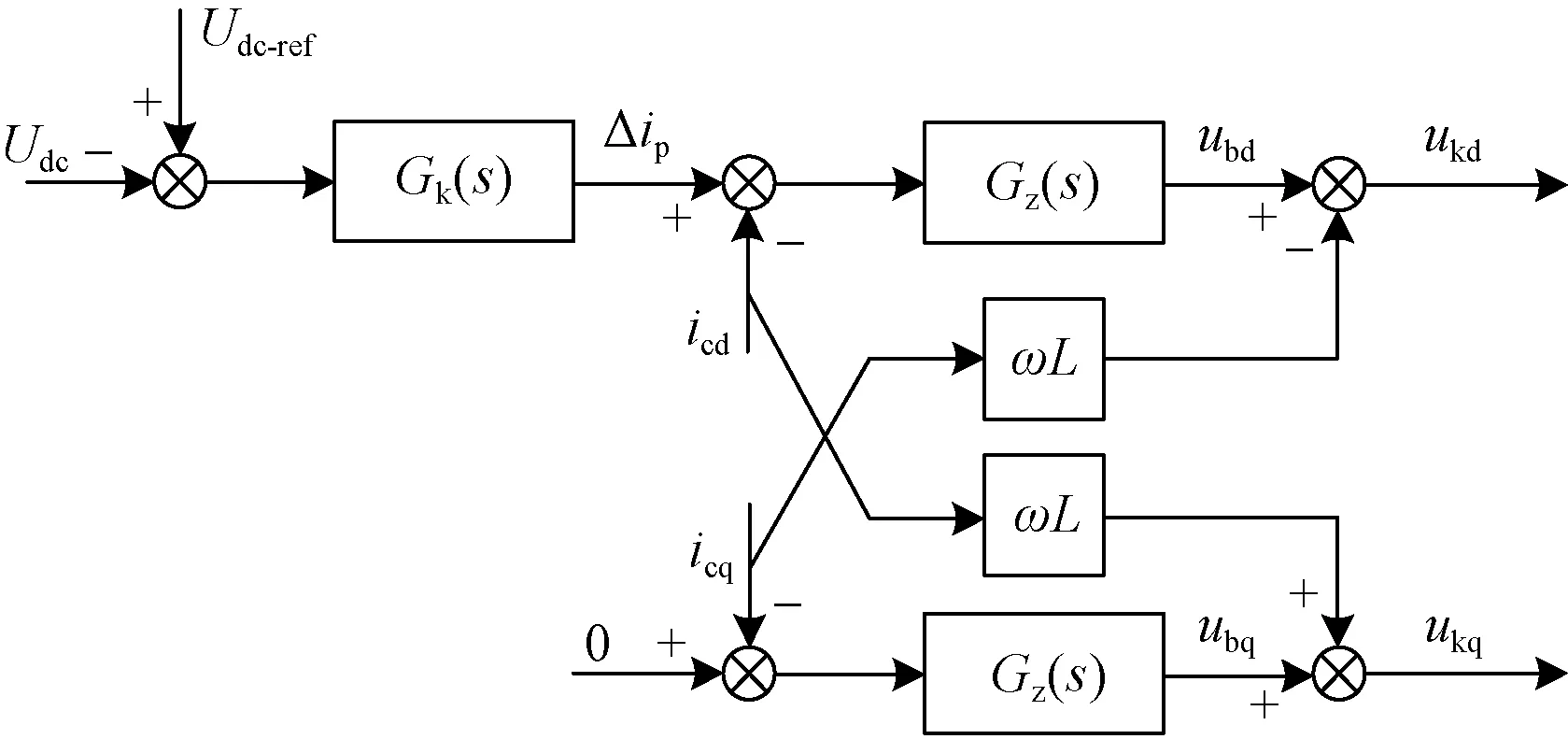
图8 基波电流环控制框图
3 补偿谐波电流的传递规律
本文采用回馈装置将回馈电能馈入整流机组低压第三绕组(1 180 V),同时使其具有电网侧谐波电流治理的作用。由图1可知,电网侧谐波电流主要来源于四个整流桥的整流机组负荷和城轨交通站的低压配电负荷;而回馈装置注入的补偿谐波电流与电网间存在移相变压器的隔离和移相。下面对从回馈装置注入补偿谐波电流的传递规律进行分析。
图9所示为两种不同移相角的连接方式,原边采用延边三角形的连接方式,副边采用星形连接方式,可以获得两种不同的移相角[22,23]。对于24脉波整流器的特征谐波文献已有推导,下面以图9(a)所示正移相角的移相变压器为例,讨论正序与负序谐波电流通过整流变压器后相移的差异。
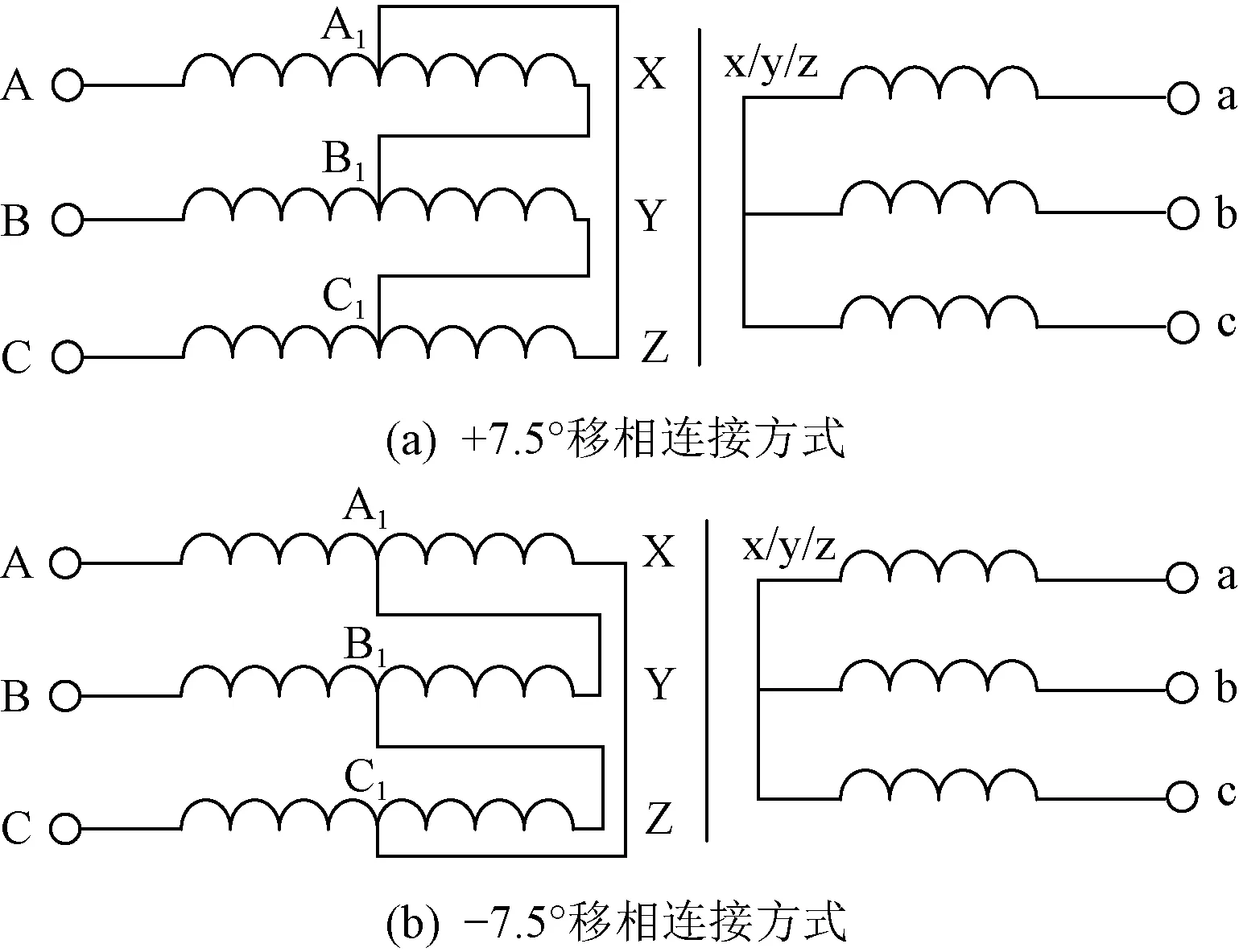
图9 移相变压器绕组连接方式

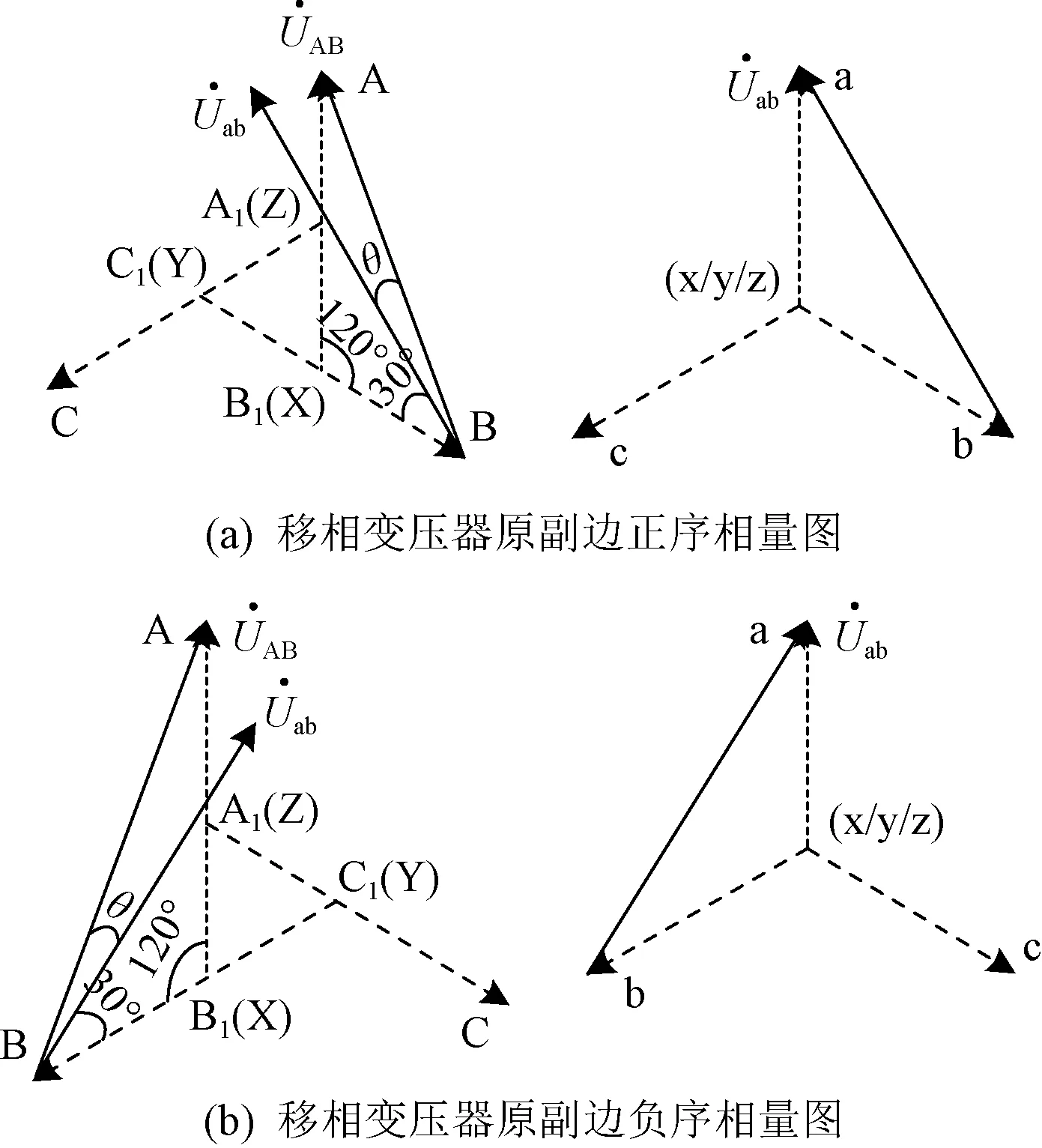
图10 正负序下的移相变压器相量图
设正序基波下副边a相与b相电压及ab相间线电压为:
(20)
以图10(a)的A相为例,原边组成AB相间线电压的三角形为ΔAB1B,设原边A1A绕组(延边绕组)与副边a相绕组匝数比为N1∶1,原边XA1绕组(原边Δ绕组)与副边a相绕组匝数比为N2∶1,有:
(21)
则由图10(a),原边AB相间线电压为:
(22)

由图10(a)可知,对于图9(a)所示的正移相变压器来说,φk=30°-θ,θ为移相变压器的正移相角。
对于基波负序,由图10(b),设基波负序的副边a相与b相电压及ab相间线电压为:
(23)
经过式(21)和式(22)的类似推导, 可得:
uAB=Asin(ωt+φ-φk)
(24)
对比式(22)可知,对于基波负序电压经过该变压器移相,副边相位滞后原边θ。
同理,对于正序谐波(n倍基波频率,n=3x+1,x=1,2,3,…;如7次、13次、19次和25次等)来说,与正序基波下移相变压器移相的规律相同,仍然满足副边超前原边θ的移相规律;对于负序谐波(n倍基波频率,n=3x-1,x=1,2,3,…;如5次、11次、17次和23次等)来说,与负序基波下移相变压器移相的规律相同,仍然满足副边滞后原边θ的移相规律。
综上,对于移相角为θ的移相变压器来说,正序谐波分量下,副边超前原边θ;负序谐波分量下,副边滞后原边θ。对于任意次数谐波,原边到副边的传递规律仅与移相变压器本身的移相角及谐波正负序(次数)有关。移相变压器的电流与电压遵从同样的关系。
由此可得,对于本文所研究的24脉波整流机组,通过移相变压器,回馈装置的补偿谐波电流传递至电网侧时正序谐波电流将负移相7.5°,负序谐波电流将正移相7.5°。
为此,如图2所示,在谐波控制环中,VR控制器输入的电网电流采用电网侧电压的相位θs顺时针方向(正序)dq变换;其输出采用整流变压器二次侧(输出)电压的相位θc顺时针方向(正序)dq逆变换可获得正序谐波电流指令,采用整流变压器输出侧电压的相位θc逆时针方向(负序)dq逆变换可获得负序谐波电流指令。这就很容易实现了上述谐波的传递规律。
4 不同工况谐波电流抑制与制动能量回馈仿真验证
为了验证所提方案和控制策略的可行性和正确性,下面对24脉波整流机组不同工况下对电网谐波电流抑制与制动能量回馈效果进行仿真验证。仿真中,主要考虑了整流机组轻载和重载工况、故障下系统12脉波运行及整流变压器的制造误差等因素,同时,还将验证单VR及双VR的控制性能。回馈装置及控制系统的主要参数见表1。列车与牵引系统模型的主要参数见表2[24]。

表2 列车与牵引系统模型参数
由于牵引直流电网额定母线电压为1 500 V,网压波动最大允许值上限为1 800 V[25],因此设置制动能量回馈稳压控制投入的阈值为1 700 V。牵引状态下的直流母线电压由交流电网(整流)与负荷确定;同时,为了简化仿真,机车负荷由直流电流源模拟。
4.1 能量回馈装置APF工作的性能仿真
由于电网存在大量谐波电流的状态只有在列车从电网取电的情况下存在,因此能量回馈装置作APF功能运行时主要存在于牵引状态,以及考虑列车辅助供电的惰性或停车状态,以下分别从整流变压器轻载与重载工况、故障下系统12脉波运行及考虑整流变压器的制造误差等方面对能量回馈装置APF工作的性能进行验证。
4.1.1 双12脉波整流变压器完全对称
机车牵引供电的24脉波整流机组是由两个12脉波整流变压器组成,每个12脉波整流变压器由完全对称的Y绕组和Δ绕组构成。对于这种理想的24脉波整流机组,三相对称平衡供电系统中理论上仅存在23次以上的谐波电流;为此,谐波电流抑制控制系统中仅设置了一个(24次谐振)VR控制器(单VR),对23次和25次谐波电流进行抑制。
(1)轻载下单VR控制的滤波效果
轻载工况下,直流母线负载电流设为2 000 A,负载功率约为整流变压器容量的30%,以a相为例,电网(35 kV)侧电流波形如图11(a)所示,回馈装置的有源滤波功能投入后,电网侧电流波形如图11(b)所示,滤波功能投入前后其总谐波含量(Total Harmonic Distortion,THD)分析对比如图11(c)所示,直流侧电压对比如图11(d)所示。

图11 对称变压器轻载网侧电流与直流侧电压分析对比
由图11(c)谐波分析可知,完全对称的整流变压器,2 000 Hz以下的谐波主要集中在23次和25次,其THD为4.71%。投入有源滤波功能后,23次和25次谐波电流得到了有效抑制,其THD为2.25%,网侧电流波形有了明显改善。
为了减小装置运行的损耗,有源滤波时未对直流侧电压进行控制。由图11(d)所示有源滤波投入前后直流侧电压对比可知,完全对称的24脉波整流机组,直流侧电压一周期脉动24次。投入有源滤波后,由于装置输出电流含有较高的谐波,表现为谐波能量不断地被电容吸收与释出,导致直流侧电压纹波增大;但直流侧电压波动对补偿效果影响不大。支撑电容选取较大值,将有利于减小直流侧电压纹波;进一步,也可以考虑通过变流器装置对直流侧电压进行控制。
(2)重载下单VR控制的滤波效果
重载工况下,直流母线负载电流设为5 000 A,负载功率约为整流变压器容量的80%,以a相为例,电网(35 kV)侧电流波形如图12(a)所示,回馈装置的有源滤波功能投入后,电网侧电流波形如图12(b)所示,滤波功能投入前后THD分析对比如图12(c)所示,直流侧电压对比如图12(d)所示。
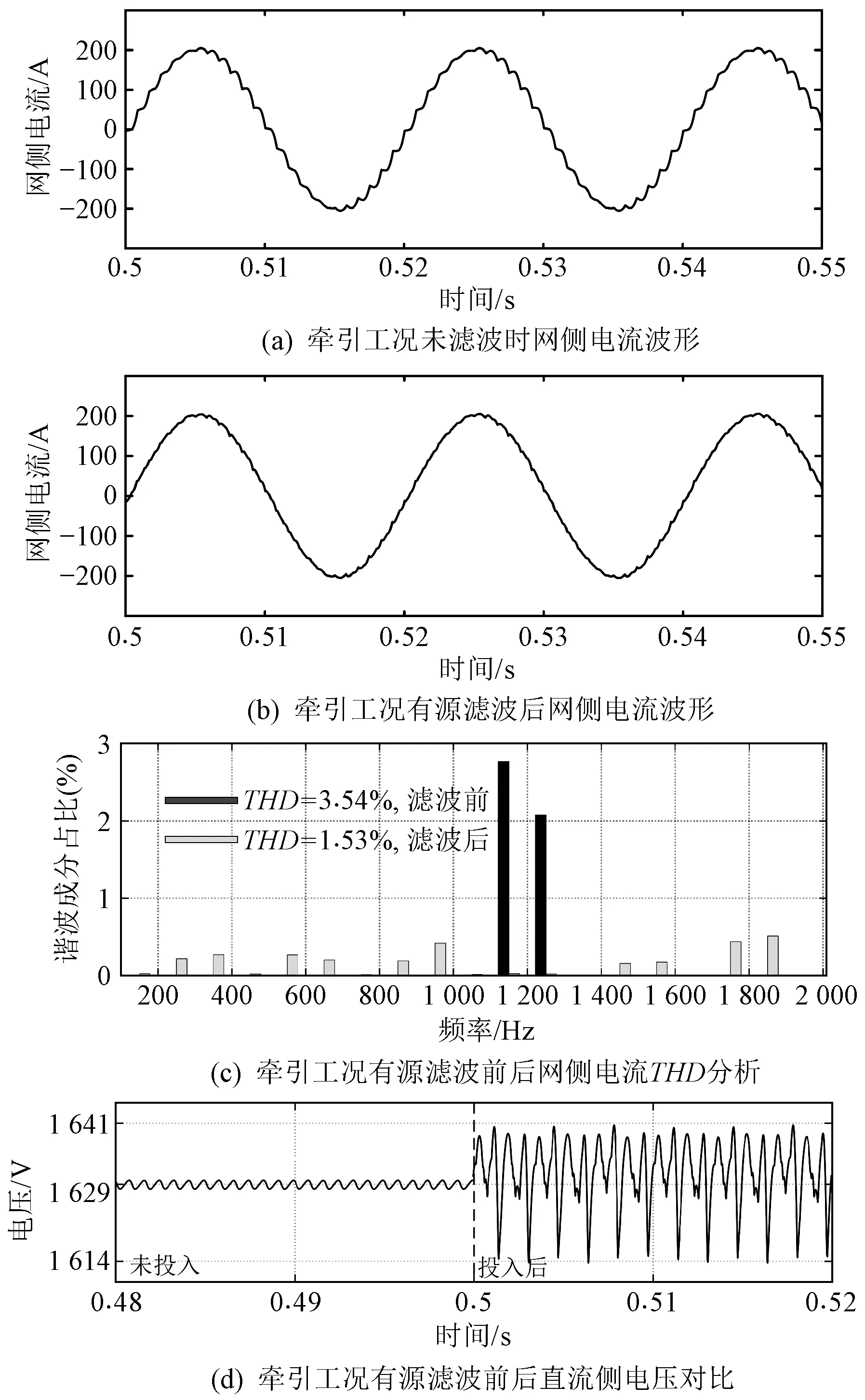
图12 对称变压器重载网侧电流与直流侧电压分析对比
由图12(c)可知,滤波前2 000 Hz以下的谐波电流主要集中在23次和25次,其THD为3.54%。回馈装置的有源滤波功能投入后,其THD降为1.53%,电网侧的23次和25次电流谐波得到了进一步抑制。
4.1.2 双12脉波整流变压器不完全对称
24脉波整流机组是由两台12脉波整流机组构成的。由于整流变压器制造误差、安装位置差异,还有实际供电电压与理想电网间存在的偏差,将使24脉波整流机组实际应用中除含有特征谐波外,还存在含量比较高的11次、13次等非特征谐波;一些城市地铁配电网的实测也表明了这点[10]。为此,谐波电流抑制控制系统中可设置两个(12次与24次谐振)VR控制器(双VR),对11次、13次和23次、25次谐波电流进行抑制。
(1)轻载下双VR控制的滤波效果
轻载工况下,直流母线负载电流设为2 000 A,负载功率约为整流变压器容量的30%;通过调整变压器参数来模拟制造、安装等不对称运行情况,以a相为例,电网(35 kV)侧电流波形如图13(a)所示,有源滤波功能投入后,电网侧电流波形如图13(b)所示,滤波功能投入前后其THD分析对比如图13(c)所示,直流侧电压对比如图13(d)所示。
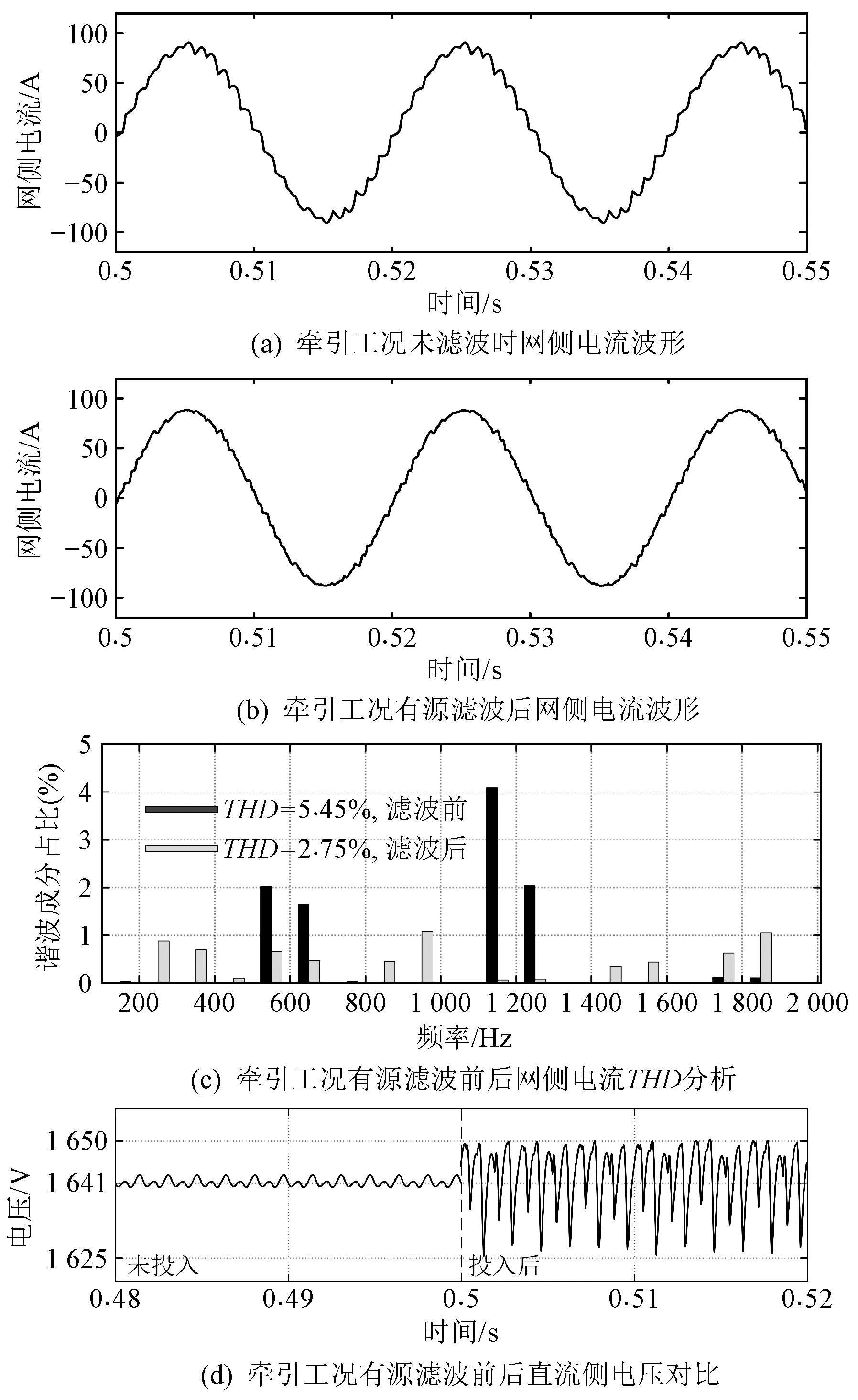
图13 非对称变压器轻载网侧电流与直流侧电压分析对比
由图13(c)的谐波对比分析可知,对于非对称的整流变压器,2 000 Hz以下的电流谐波除含有23次和25次特征谐波外,系统出现了11次和13次非特征电流谐波,其THD为5.45%。回馈装置的有源滤波功能投入后,其THD为2.75%,11次、13次、23次和25次谐波电流得到了有效抑制,网侧电流波形有了明显改善。
由图13(d)所示有源滤波前后直流侧电压对比可知,不完全对称的24脉波整流机组,电压脉动增加,这是由11次和13次非特征谐波电流导致的。投入有源滤波后,由于装置输出电流含有更高的谐波量,电压纹波变大,但纹波系数较低,仍然能够保证谐波补偿效果。
(2)重载下双VR控制的滤波效果
重载工况下,直流母线负载电流设为5 000 A,负载功率约为整流变压器容量的80%,同样通过调整变压器参数来模拟制造、安装等不对称运行情况,以a相为例,电网(35 kV)侧电流波形如图14(a)所示,有源滤波功能投入后,电网侧电流波形如图14(b)所示,滤波功能投入前后其THD分析对比如图14(c)所示,直流侧电压对比如图14(d)所示。
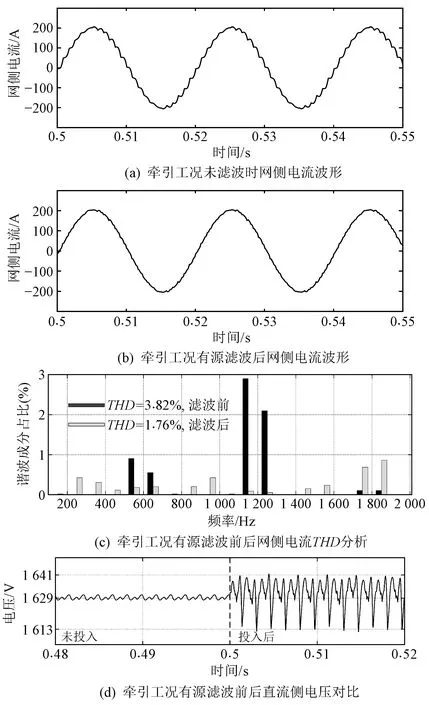
图14 非对称变压器重载网侧电流与直流侧电压分析对比
由谐波分析可知,未投入滤波功能的网侧电流,2 000 Hz以下的谐波除主要集中在23次和25次特征谐波外,系统出现了11次和13次非特征电流谐波,其THD为3.82%。
由图14(c)所示的滤波前后THD分析可知,11次、13次、23次和25次电流谐波得到了进一步抑制,其THD为1.76%,电网侧的电流波形得到了改善。
4.1.3 单台12脉波整流机组运行
城轨牵引系统的24脉波整流机组是由两台12脉波整流机组构成的;按相关要求,当一台12脉波整流机组故障时,另一台12脉波整流机组在一定时间内需要继续应急运行,这时整流机组会向电网注入大量谐波电流。为此,同样可以在谐波电流控制系统中设置两个(12次与24次谐振)VR控制器(双VR),对11次、13次和23次、25次谐波电流进行抑制。
直流母线负载电流设为3 000 A,负载功率约为单台整流变压器容量的96%,以a相为例,单台12脉波整流机组运行时电网(35 kV)侧电流波形如图15(a)所示,有源滤波功能投入后,电网侧电流波形如图15(b)所示,滤波功能投入前后其THD分析对比如图15(c)所示,直流侧电压对比如图15(d)所示。
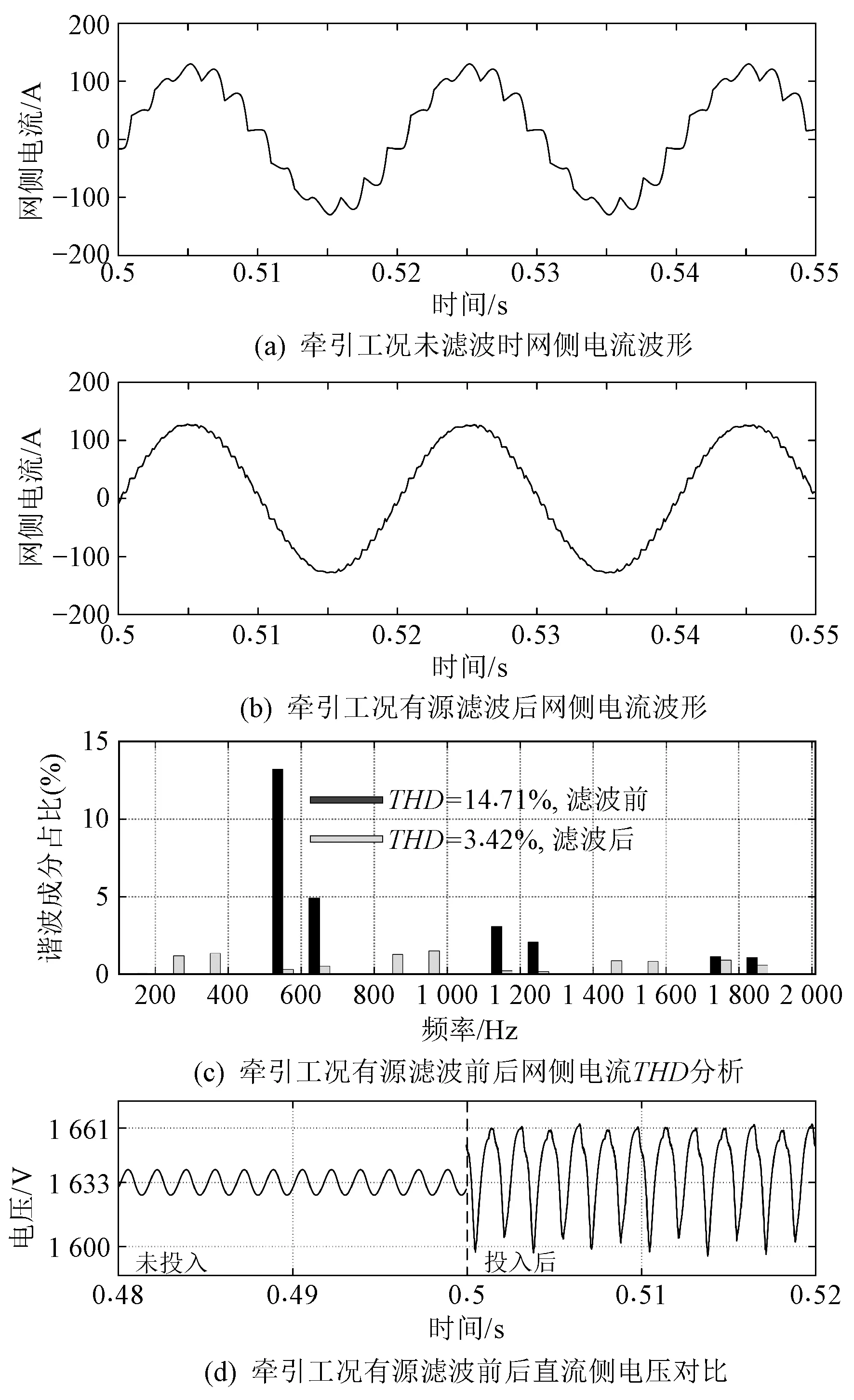
图15 单台12脉波整流机组运行时网侧电流与直流侧电压分析对比
由图15(c)所示谐波分析可知,只有一台12脉波整流机组工作时,2 000 Hz以下的谐波电流主要集中在11次、13次、23次和25次特征谐波上,其THD达到了14.71%。
回馈装置的有源滤波功能投入后,11次、13次、23次和25次谐波电流都得到了有效抑制,其THD为3.42%,电网侧的电流波形得到了大幅改善,滤波效果非常明显。
由图15(d)所示有源滤波前后直流侧电压对比可知,只有一台12脉波整流器工作时,电压脉动增大,脉动次数变为12次。投入有源滤波后,由于装置输出电流含有更高的谐波量,电压纹波变大,但影响较小,仍然能够保证较好的补偿效果。
4.2 能量回馈功能仿真
考虑回馈装置容量为3 MW,满载状态下,即制动回馈电流最高时的工作情况;设列车制动时最高直流电流为1 800 A,典型制动电流波形如图16所示[26];制动工况下直流母线达到1 700 V时启动回馈装置。以a相为例,电能回馈装置工作时电网(35 kV)侧电流波形及0.4 s 时刻一个工频周期THD(近似)分析结果如图17所示。制动工况下电能回馈装置仅回馈有功功率,此时整流机组不工作,系统也不存在谐波电流源,这时电网电流THD=1.96%, 为THD较低的正弦电流波形。

图16 列车制动直流电流波形
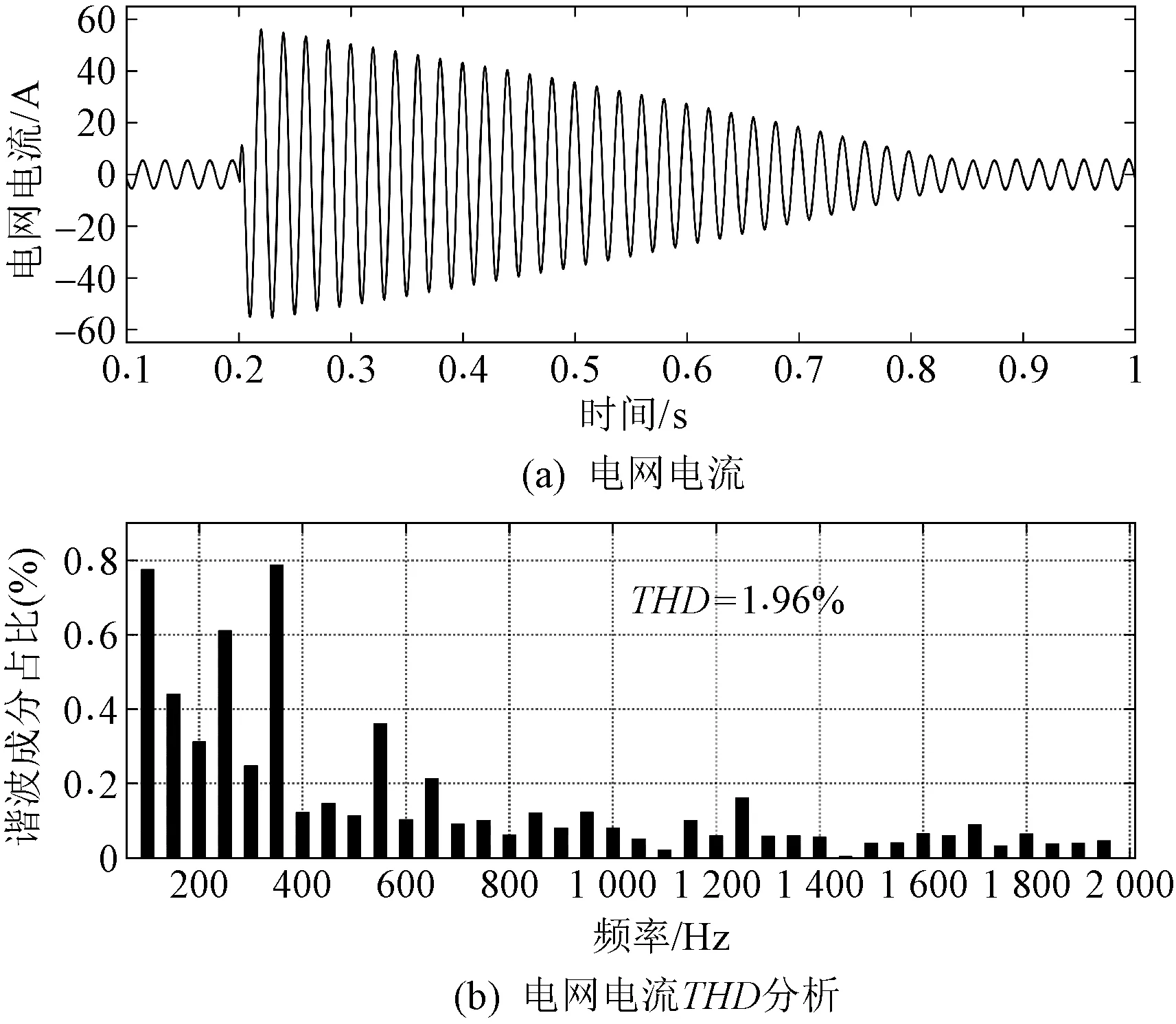
图17 制动工况下网侧电流与THD分析
制动工况下能量回馈装置工作时直流母线电压波形变化如图18所示。
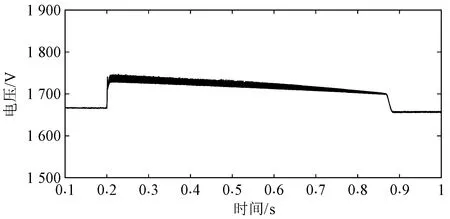
图18 制动工况下直流母线电压
由图18可知,当加入回馈装置后直流母线电压能够被限制在设计要求范围,未超过直流电压的保护设定值1 800 V,并随着制动电流的减小缓慢降回到正常直流电压状态,符合回馈装置的设计预期。
5 结论
针对城市轨道牵引供电系统设置的制动能量回馈装置提出了一种兼备配电网谐波电流治理能力的制动能量回馈与谐波电流抑制策略。本文的主要结论如下:
(1)提出了一种利用城轨牵引供电系统中设置的制动能量逆变回馈装置和整流变压器对牵引供电系统本身产生的谐波电流进行抑制的(电路)方案。
(2)为了实现该方案,对24脉波移相整流变压器组中不同序谐波电流的传递规律研究,结果表明:通过移相变压器,回馈装置补偿的谐波电流传递至电网侧时正序谐波电流将负移相7.5°,负序谐波电流将正移相7.5°。
(3)基于不同序谐波电流在24脉波移相变压器中的传递规律和矢量谐振控制器,提出了一种牵引供电系统电网侧谐波电流的闭环控制方法。
(4)当牵引系统直流母线电压在规定范围内时,回馈装置作APF使用,用于抑制电网谐波电流,改善配电网的电能质量;当牵引系统直流母线电压超过设定阈值时,逆变回馈功能启动,转移列车制动过程中产生的电能。
所提出的电路方案和控制方法能够方便地实现有源滤波与能量回馈模式的切换,净化了牵引供电系统,提高了制动能量回馈装置的利用率。
Matlab/Simulink平台的仿真结果验证了所提控制方案和方法的有效性和正确性。本文研究结果为城市轨道牵引供电系统的制动能量回收与电能质量治理提供了一种新思路。