多智能体系统事件触发一致性研究综述
2022-10-26张栋马苏慧吕石王孟阳唐硕
张栋,马苏慧,吕石,王孟阳,唐硕
(1. 西北工业大学 航天学院,陕西,西安 710072;2. 陕西省空天飞行器设计重点实验室,陕西,西安 710072)
多智能体系统(multi-agent systems,MASs)一致性是指由多个智能体组成的群体,能够通过所设计的分布式协议进行信息交互,以合作或竞争等方式实现状态的趋同及其任务. 随着MASs 规模的扩大和任务复杂性的提高,MASs 通信传输数据的量级不断提高. 针对多种通信问题所设计的一致性协议,已经无法高效、可靠地解决由软硬件限制和大数据导致的传输延迟、数据丢包、带宽限制等问题以及系统资源消耗过大的问题.
在20 世纪50 年代末,ELLIS[1]就已经意识到最合适的采样方法是指传输有意义的数据,即当数据以给定的增量改变获得新值. 因此状态变量可以进行更稀疏地采样而不会影响控制性能. 这种当测量值超过一定限度才进行采样、依赖于信号的采样方案被称为Lebesgue 采样[2],即事件触发采样;依赖于时间轴的周期采样被称为Riemann 采样[2],是事件触发采样的特例[3]. 事件触发采样的思想是根据所定义的事件满足与否,使作用对象采取特定的动作或决策. 相比于连续或周期通信的控制方案,事件触发一致性方案能够根据事件内容使控制器更新或者通信连接进行稀疏、有效、灵活地响应,实现和保持一致性性能. 事件触发一致性控制是从大规模通信、资源消耗问题的内在因素出发,在保证一致性实现的前提下,减少个体之间数据传输频率,克服通信和资源的限制并提高通信传输效率;同时,稀疏通信传输也能使通信网络攻击难度提高,进而提高数据的安全性. 因此,事件触发一致性控制方案是复杂大规模情况下有利于MASs 一致性表达和资源节省的重要手段.
1 MASs 事件触发一致性
OLFATI-SABER 等[4]给出了MASs 经典一致性控制协议:
在该协议的作用下,所有智能体的状态最终能够收敛到初始状态的平均值.
将事件触发机制引入到MASs 一致性控制中,则事件触发一致性协议可表示为
MASs 事件触发一致性控制方案如图1 所示.MASs 事件触发一致性控制利用事件检测器改变控制器输入,其原理是:事件检测器i对本地传感器和外部通信网络传输的信息进行采集,根据定义的事件触发函数进行解算,判断是否满足事件触发的条件,在此基础上对触发信息的传输进行决策. 如式(4)(5)所示,事件检测器i对相关变量进行监听,一旦发现误差函数fi的数值大于阈值函数Vi的数值时,触发控制的开关闭合,则智能体i的触发信息将被发送给邻居智能体、控制器i开始进行采样更新且测量误差ei(t)归0;在相邻的触发间隔内,MASs 会采用零阶保持器使得控制器的输出保持为固定数值,因此执行器i会得到一个分段连续的控制信号.
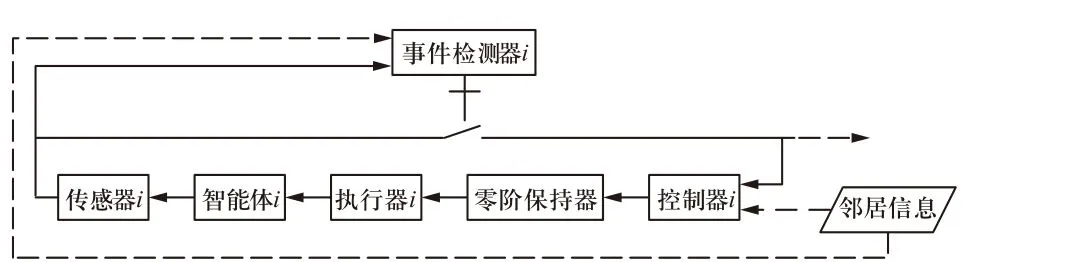
图1 事件触发一致性控制方案Fig. 1 Event-triggered consensus control schemes
在事件触发一致性的实现过程中,智能体i的事件检测装置仍需消耗资源去实现状态监听、事件检测和触发信号发送的功能;但对于分布式MASs 来说,来自远程节点的邻居信息才是控制器i采样收集的数据主体. 相比于原来的一致性控制方案,事件触发一致性协议只使用智能体i自身和邻居触发时刻的状态信息,减少了通信和计算的负载,降低了资源消耗,提升了系统的可靠性.
在保证所设计的事件触发协议和事件触发函数能够使得系统实现一致后,事件触发一致性控制方案还需排除Zeno 行为的发生. Zeno 行为是指在有限时间内发生无限次触发;一旦Zeno 行为发生,事件会在某个有限时间内发生连续触发,这就违背了引入事件触发的目的,因此应该尽量避免Zeno 行为.
2 事件触发机制及设计策略
事件触发一致性的关键是设计事件检测器. 事件检测器的内容和工作方式将决定事件触发的机制,进而影响系统通信计算频率和一致性表现. 经典的事件检测器结构如图2 所示. 事件触发函数的输入由事件检测器的监听对象和监听方式定义,触发函数的具体形式描述事件触发的设计策略,事件检测器输入和输出端口的位置影响事件检测器的通信方式. 事件检测器设计的差异会使得控制方案效果有所不同. 因此,本文将围绕事件的监听机制、触发函数的结构设计和事件检测器间的通信机制3 个特征,介绍事件触发的设计策略以及具体的控制方案.
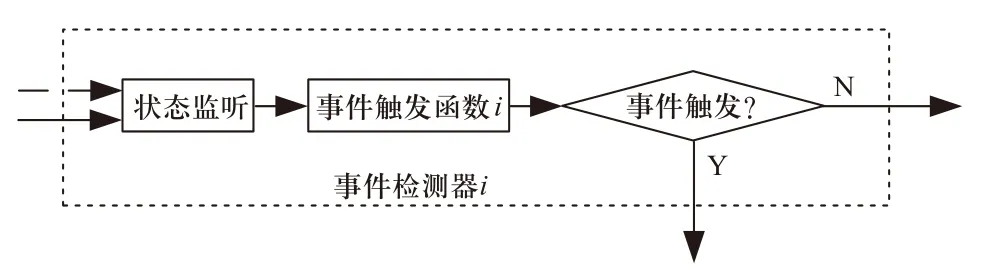
图2 事件检测器的结构Fig. 2 The structure of event detector
2.1 事件触发的监听机制
2.1.1 监听对象
任务目标和智能体动态的差异以及限制条件等影响下,事件检测器监听对象zi(t)的定义是不同的.
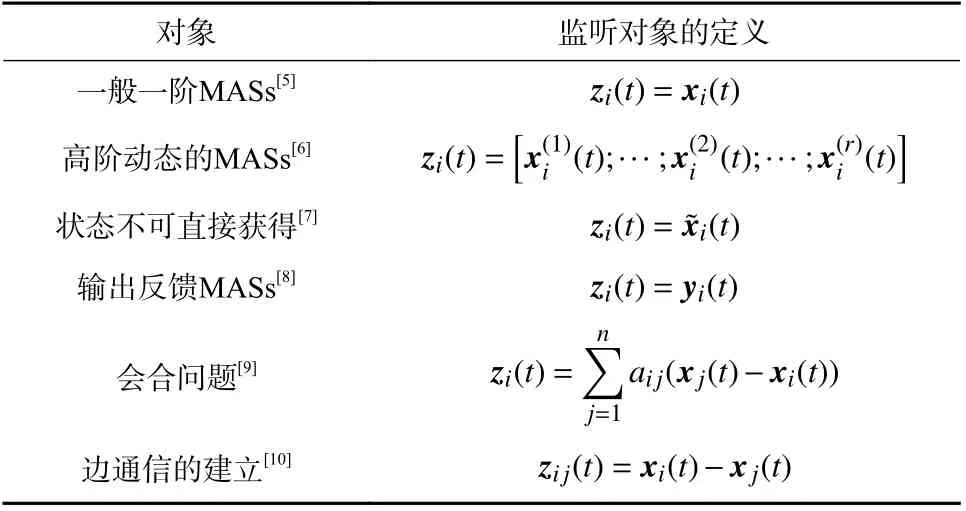
表1 监听对象的定义Tab. 1 Definition of monitored objects
特别地,为使触发间隔内的控制输入不是常值信号而是随时间变化的连续信号,GARCIA 等[11]引入估计器的概念,其构型为
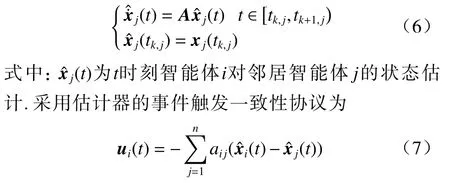
此时事件检测器的监听对象是估计变量,即zi(t)=xˆi(t). 式(6)是一个开环估计. 开环估计器的设置可以使智能体之间进行无连续通信的同时,事件检测器的监听对象又具有一定的动态特性,但会导致部分计算资源的占用.
2.1.2 监听方式
① 连续/离散
事件检测器对相关变量进行实时监听的方式包括连续和离散两种方式. 连续监听是指事件检测器会在MASs 动力学方程的每个时间步长均进行采样,离散监听则指检测器会以动力学方程时间步长的倍数为时间间隔进行采样.
文献[5,11]设计了基于连续监听机制的事件触发一致性控制方案,如式(3)(4)所示. MENG 等[12]和GUO 等[13]将采样数据的思想应用到事件触发控制中,设计出基于离散监听机制的事件触发,又称为基于采样数据的事件触发方案,如下所示.
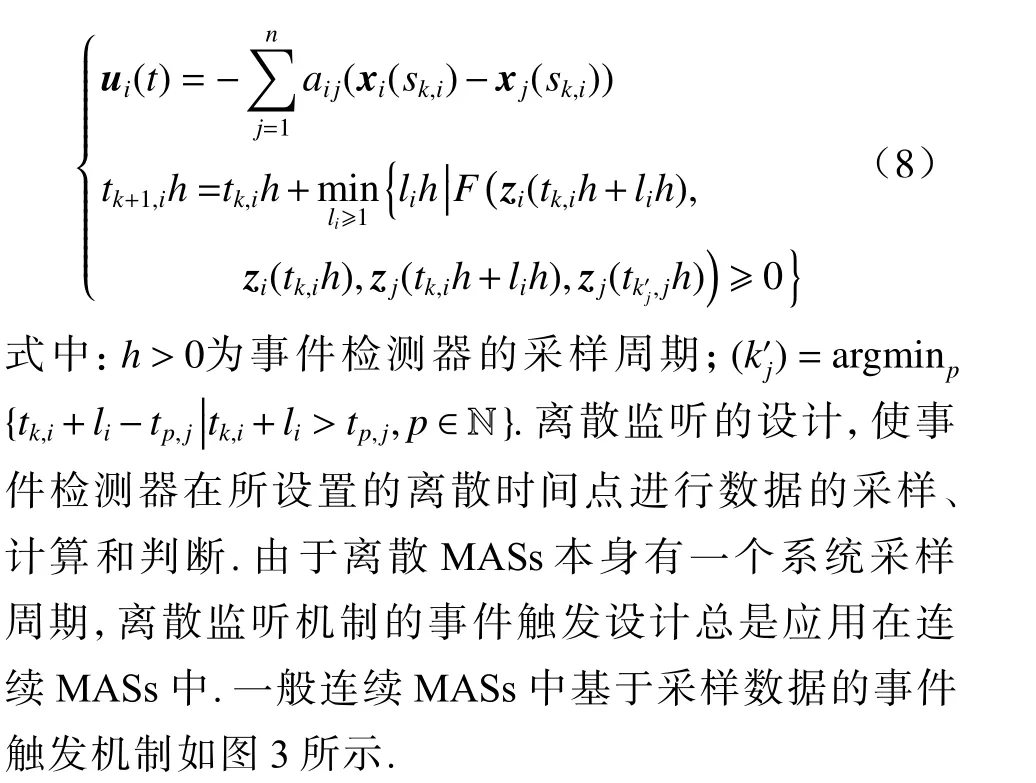
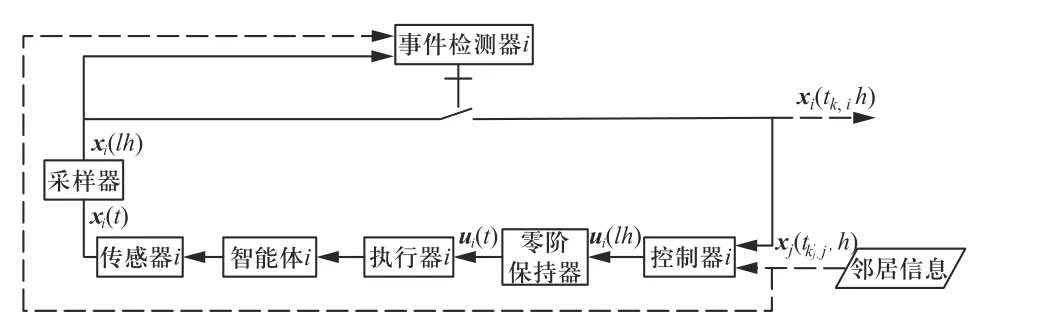
图3 连续MASs 基于采样数据的事件触发机制Fig. 3 Sampled-based event-triggered mechanism of continuous-time MASs
除固定周期的采样监听以外,随机采样[14-16]的监听方式也被应用在一致性研究中. 随机采样的监听机制中,事件检测器的采样间隔是完全随机的序列或者以固定概率选择某一大小的周期.
② 同步/异步
式(8)中,所有事件检测器的采样周期大小相同,这意味着所有智能体的监听时序是周期同步的. 基于随机采样数据的事件触发方案则是非周期同步的.当每个智能体的事件检测器拥有不同大小的采样周期,则称该触发方案是异步的. 在离散监听机制设计的基础上,异步监听事件触发机制[17-19]设计如下:
2.2 事件触发函数的设计策略
① 依赖状态/不依赖状态的阈值设计
在早期研究中,事件触发函数是通过对MASs 进行一致性推导得出,式(5)中的阈值函数仅与状态变量有关,此时MASs 事件触发的频率会随着系统规模的扩大而提高,容易导致Zeno 行为的发生. 针对这一现象,不依赖状态的阈值函数被提出,通过对触发函数结构进行合适的设计并且调整不依赖状态部分的相关参数,可以在调整收敛速率的同时,避免Zeno 行为发生. 根据依赖或不依赖状态事件触发函数的设计策略,式(5)中的阈值函数可总结如下:

式中:δ1(t)和δ2(t)为与状态变量无关的阈值参数;Vi1(·)为状态变量的函数.
当δ1(t)≠0时,阈值函数Vi依赖于状态变量、状态变量的组合以及时间变量,称为依赖状态的事件触发函数. CAO 等[10]设计出阈值函数为Vi(t)=δ1·(t)Θizi(t)的状态依赖事件触发控制方案,并指出其所研究的触发方案只能使具有一般线性动态的MASs 实现渐近一致却不能避免Zeno 行为. 依赖状态的事件触发控制方案对状态变化敏感,能够充分利用当前智能体的状态信息,使系统实现一致.
当δ1(t)=0且δ2(t)≠0时,阈值函数Vi与状态量无关仅与时间变量有关,称为不依赖状态的事件触发函数. ZHANG 等[20]和YANG 等[21]设计不依赖状态的事件触发阈值函数为Vi(t)=αe-βt(α,β >0),包含该阈值函数的事件触发方案使得一般线性MASs 在实现状态一致或输出一致的同时,避免了Zeno 行为.在周期采样MASs 中,YANG 等[22]提出Vi(t)=αβt的阈值函数. 不依赖状态的事件触发函数计算量较少,其对应的方案可以避免Zeno 行为的发生.
GARCIA 等[11]研究了阈值函数为Vi(t)=δ1·(t)Θi zi(t)+c的事件触发方案,该方案能够使系统避免Zeno 行为的发生但只能实现有界一致性;CUI 等[23]也在异构MASs 中发现将常数阈值c引入依赖状态的事件触发函数中可以使得MASs 不会发生Zeno 行为,但会降低一致性控制性能表现.
② 基于动态参数的阈值设计
在MASs 事件触发一致性方案的作用下,事件检测器的监听变量会逐渐达到收敛的状态,并且测量误差变化的幅度逐渐降低,这会导致式(5)中的误差函数和阈值函数的实时输出接近,进而使得事件触发的频率升高. 理想的触发方案能够在一致性协议作用初期以较大触发间隔工作,在一致性快要实现时自动降低触发间隔的大小,因此提出了动态事件触发一致性方案,即对应的阈值函数中δ1(t)或δ2(t)是由与状态变量相关的微分方程或差分方程驱动的辅助变量. 基于采样数据的事件触发函数,YIN[24]和GE 等[25]设计智能体i对应的触发阈值δ1(t)是由差分方程驱动的,且δ1(t)∈[0,1)是单调非增的时间序列. YI 等[26]提出了一类含有由微分方程驱动的阈值项δ2(t)的事件触发方案,避免了Zeno 行为. 时变的阈值参数能够动态地调整触发时间间隔,以更好的响应性去实现一致性的控制性能要求.
2.3 不同通信方式的事件触发机制
事件检测器输出端口的位置可以位于智能体内部的传感器和控制器之间,也可以处于智能体外部的触发信息传输的通信连接上. 前者决定智能体自身的触发时刻,使得智能体自身向其他所有邻居智能体发送触发信息,建立多条单向触发数据链路;后者决定智能体之间的触发信息传输时刻,使得通信连接边两端的智能体可以在触发时刻共享触发信息,建立单条双向的触发数据链路. 因此,根据事件检测器输出位置的设置MASs 触发信息传输的通信网络可以被分为广播形式和点对点形式.
2.3.1 广播形式
广播通信形式是指智能体以一对多的方式广播数据信息. 智能体i会在每次事件触发时刻广播信息,其邻居智能体截获到智能体i最新的触发时刻信息并将该信息用于控制器的输入. 根据事件检测器利用其它智能体状态信息的范围大小,广播形式的事件触发器又可分为集中式、分布式、分散式.
① 集中式
一般的集中式事件触发机制如图4 所示,其控制方案如下:
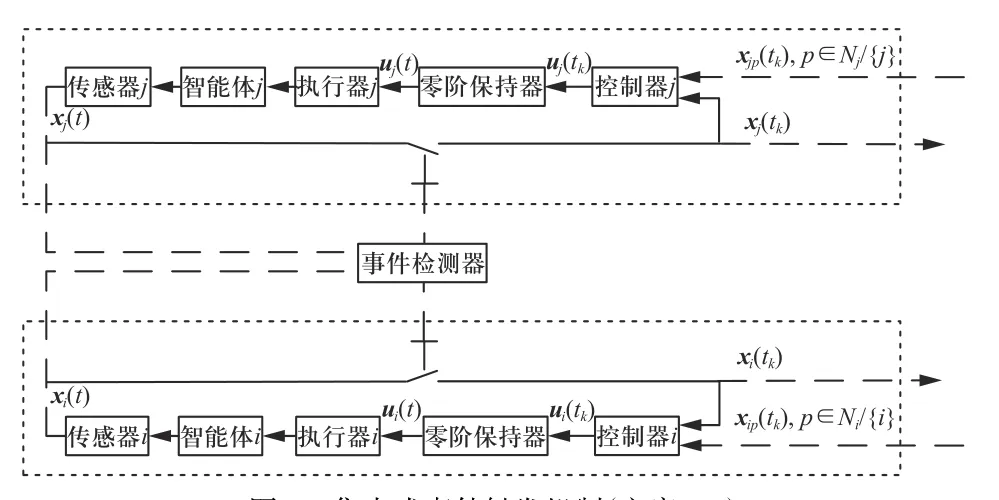
图4 集中式事件触发机制(方案A1)Fig. 4 Centralized event-triggered mechanism (Scheme A1)

式中:Ui(·)代表智能体i的协议函数.
集中式触发方案的事件检测器会对所有智能体发送的信息进行监听,并会将当前的触发状态同时发送给所有智能体. 因此集中式事件触发方案的触发时间和控制器采样更新时刻都是同步的,有tk,i=sk,i=tk(∀i). 该类型的事件触发方式,要求MASs有一个能够及时收发信息和具有充足计算存储资源的个体或者外部基站. 集中式的特性无法有效减少资源的浪费,而且很容易造成信道堵塞.
② 分散式
一般的分散式事件触发机制,如图5 所示,其控制方案如下所示.
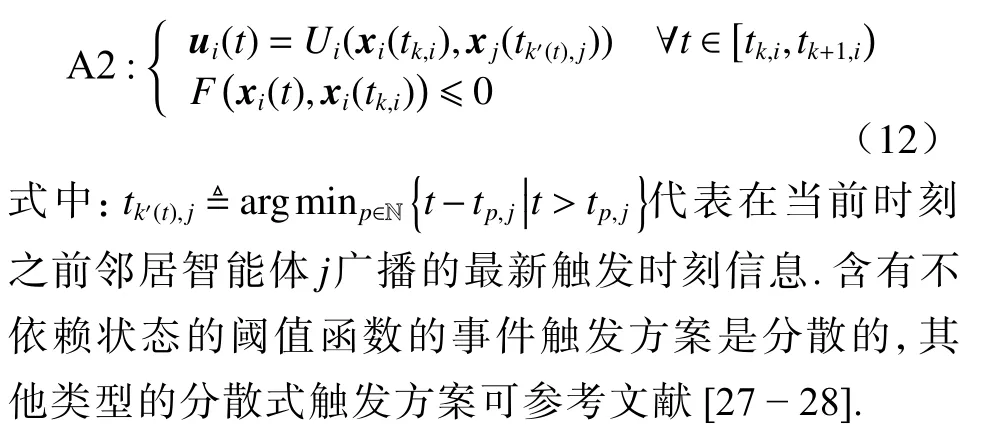
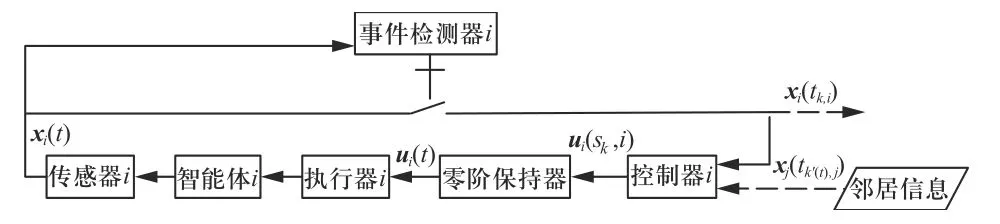
图5 分散式事件触发机制(方案A2)Fig. 5 Decentralized event-triggered mechanism (Scheme A2)
分散式的检测器只利用智能体i自身信息进行检测,因此所有智能体的触发时刻是异步的;智能体i的控制器采样更新时刻由自身及其邻居智能体的最新触发时刻所决定,故智能体的通信仅在控制器层面体现. 相对于集中式的事件触发一致性控制方案,分散式触发设计对本地事件检测器的接收信息和计算信息的能力要求不高,具有更好的响应性以及一定的安全性保障;但事件检测器仅利用自身信息检测,忽略了分布式系统广播的邻居触发信息,对邻居状态的敏感性不高.
③ 分布式
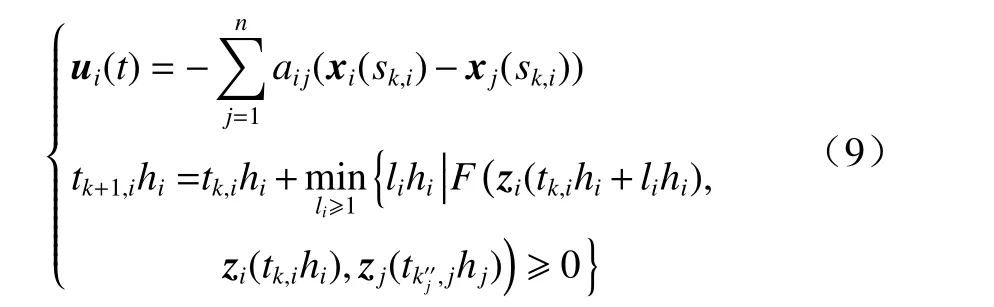
文献[5,29]提出如下的分布式事件触发机制:

在事件触发方案A3 中,智能体i的事件检测器会连续监听智能体i和邻居智能体j的状态信息,且在事件触发时需要标记存储特定数据. 相较于一般一致性方案,虽然方案A3 能够减少控制器更新频率,但整个MASs 通信计算资源的浪费仍无法避免;相较于集中式和分散式事件触发方案,智能体i对邻居状态的监听有效整合局部信息,使事件内涵更丰富.
对触发方案A3 进行改进,GARCIA 等[30]提出如图6 所示的事件触发机制,其控制方案为

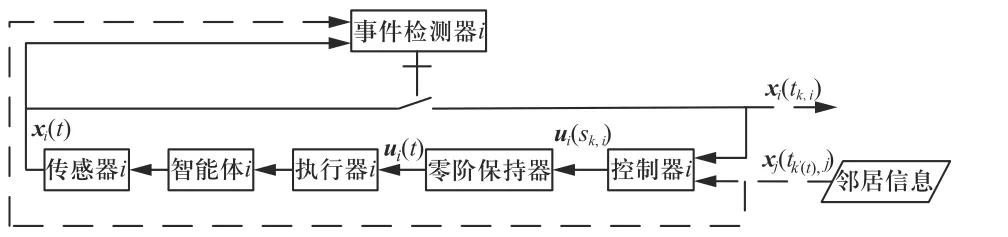
图6 分布式事件触发机制(方案A4)Fig. 6 Distributed event-triggered mechanism (Scheme A4)
对于方案A4 而言,由于智能体i获取邻居的触发信息是被动地接收,导致一旦邻居智能体的数量过大,控制器的更新频率也越大;但控制器和事件检测器都只利用自身信息和邻居触发信息,减少了对远程邻居节点信息的获取. 分布式的事件触发机制多以该类型为主.
2.3.2 点对点形式
广播形式的触发一致性是由单点事件决定触发时间,同理也可提出由边事件驱动的一致性方案. 边事件会决策一条边上两个智能体的控制器何时共享触发状态信息,其触发通信方式是点对点的.
CAO 等[10]提出如下形式的点对点事件触发一致性控制方案:

式中:zij(t)=xi(t)-xj(t)为边状态,Fl(l=1,2,···)为基于边(i,j)的多条事件触发函数规则. 在边事件驱动的一致性框架下,通信边上的两个智能体的实时信息是一直共享的;当所定义的多条事件触发规则中的一条不被满足时边事件触发,与此同时智能体i与j之间的触发边状态zij(tk,ij)更新. 方案A6 中的事件检测器仍需与邻居智能体进行连续的通信,但智能体i的控制器只需在智能体i与其所有邻居智能体之间最新的边触发时刻进行更新.
无须保持邻居间的连续通信,WU 等[32]仅利用触发时刻的边状态信息进行事件检测,如图7 所示,具体控制方案为
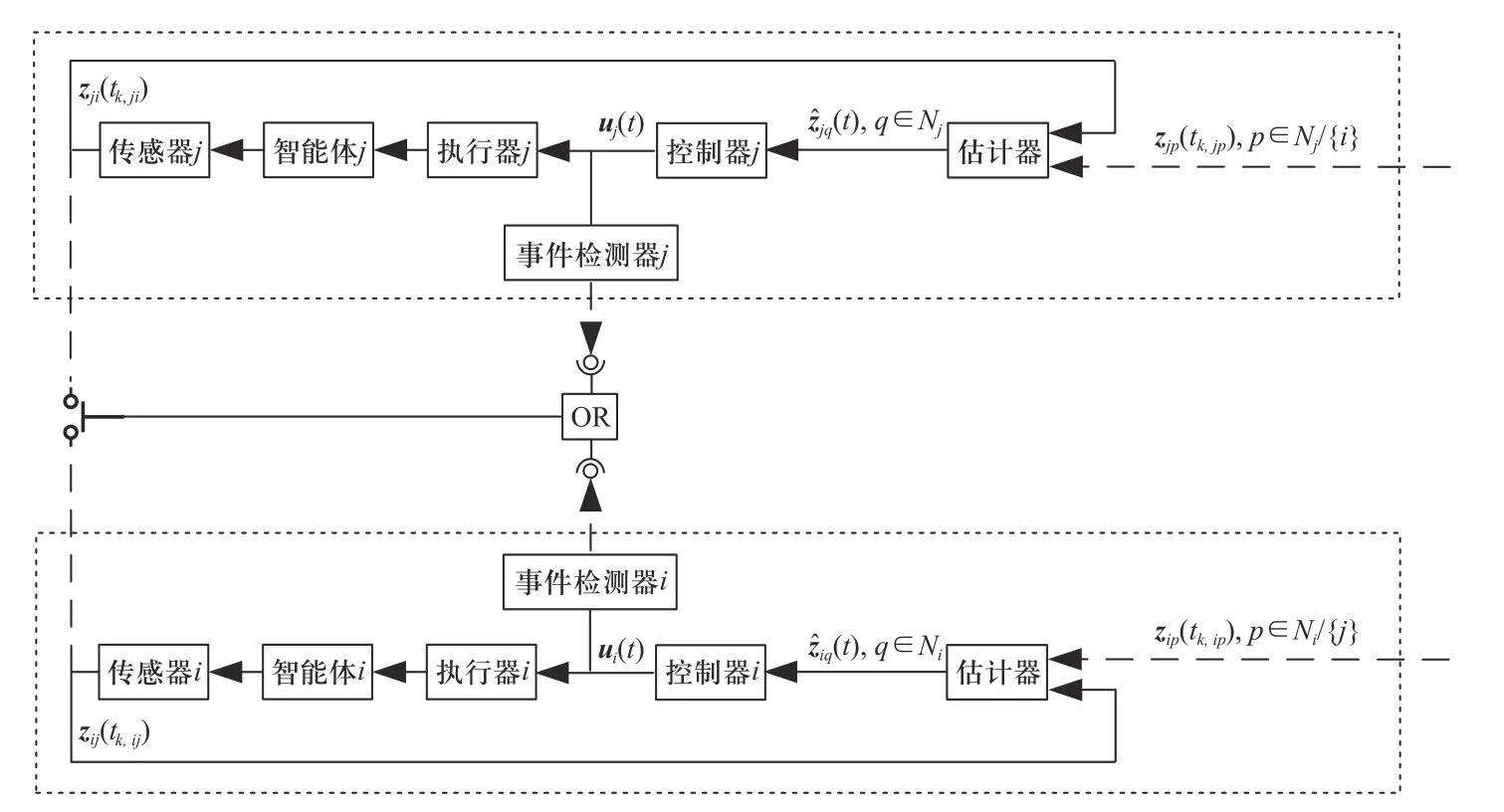
图7 点对点事件触发机制(方案A7)Fig. 7 Node-to-node event-triggered mechanism (scheme A7)

2.4 自触发机制
事件触发一致性控制方案要求事件检测器至少要连续地对本地状态信息进行实时监听. 为进一步减少本地连续监听的频率,文献[5,34]设计了仅利用触发信息的事件方案,如下所示.
自触发机制也可分为集中式[34]和分布式[35-37].DIMAROGONASIS 等[5]和FAN 等[9]分别在事件触发方案A3 和A5 的基础上,设计了分布式自触发迭代算法. 针对事件触发方案A5 进行改进,FAN 等[35]也提出一类分布式自触发算法,并通过仿真实验与文献[5]的分布式自触发方案、文献[9]的自触发迭代算法进行比较;其仿真对比实验表明事件触发方案的选择对自触发迭代算法的设计有影响. 通过将事件触发和自触发控制方案作仿真比较,文献[5,37]显示自触发方案比事件触发控制的鲁棒性更好. 在MASs 中,自触发机制完全避免了连续监听动作的执行,但其设计过程相对复杂.
2.5 混合触发机制
将时间触发和事件触发结合起来,便能得到混合触发机制. 混合触发设计思路有两种,一种是在设计触发方案时直接将时间和事件的触发机制混合起来,另一种是设计混杂MASs 的事件触发控制方案.
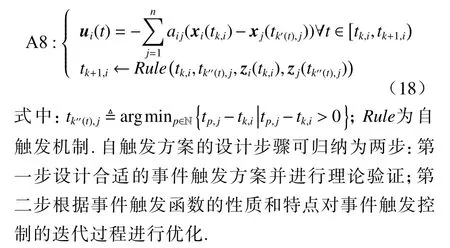
基于采样数据的事件触发机制将事件检测动作固定在每个采样点,直接将事件驱动和时间驱动结合起来. XING 等[38]在随机MASs 中将分布式的事件触发机制与分段时间结合,形式如下
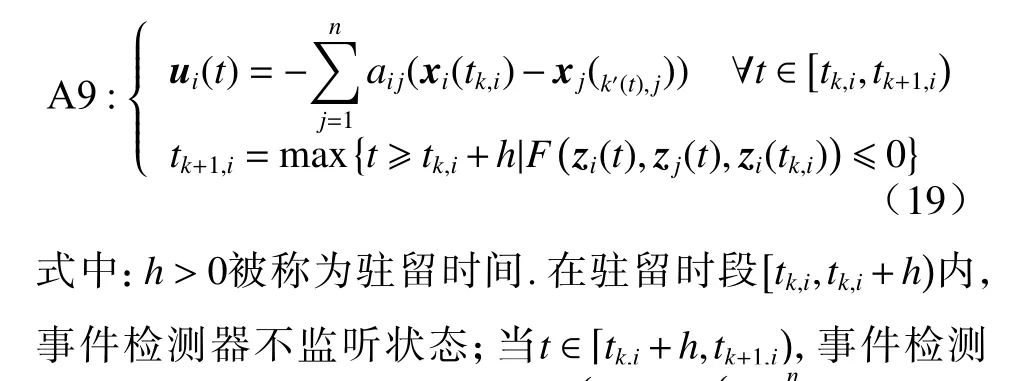

式中:{Tl,l=0,1,···}为固定时间序列. 不同于方案A9,方案A10 在某一时间段内控制输入为0,其余时间正常工作. 方案A10 比方案A9 进一步降低了控制器的更新频率,也避免了Zeno 行为的发生.
针对离散时间和连续时间动态构成的混杂MASs,WANG 等[42]通过令连续子系统的离散监听周期大小与离散子系统的采样周期大小相等,统一触发函数形式,解决了一致性问题.
3 事件触发一致性的影响因素分析
不同类型的事件触发机制与设计策略将会影响MASs 收敛表现. 除此以外,事件触发还需考虑个体差异、通信连接和外部因素对一致性的影响. 诸多学者开展了事件触发一致性的相关研究,影响事件触发一致性的主要因素可归纳为拓扑结构、网络通信、个体动态特性和外部作用4 个方面.
3.1 拓扑结构的影响分析
当通信拓扑固定时,一致性控制系统实际的信息流会在任务时段的每个时间节点形成符合要求的拓扑结构,而事件触发控制却不一定. 在事件触发方案A2、A4、A5 和A7 中,智能体仅需利用邻居智能体的触发信息,因此触发信息的数据链路构成的网络就是MASs 实际的通信网络;由于每个智能体的事件触发时刻序列不完全相同,智能体的触发信息数据流将按照固定的次序流通,这会导致实际的通信网络在任意时刻不总是满足特定拓扑网络的要求,而是在某些时间段内以联合地形式形成一定的拓扑结构,如无向连通[9]、含有一个有向生成树[13]、有向强连通权重平衡[43]和有向强连通[44]等.
文献[45 - 47]在MASs 事件触发一致性控制中考虑了切换拓扑的情形,当通信拓扑在多个无向连通图之间进行切换或者通信网络联合地包含有向生成树时,所设计的事件触发方案使MASs 实现一致.除了给定的拓扑切换时间序列,事件触发一致性控制也研究了拓扑切换是一个半马尔科夫过程[48-49]的情形. 切换拓扑的设定,使得事件检测器会在拓扑切换时刻也进行采样计算或者使得本地控制器的采样更新会直接使用最新切换时刻所有邻居的状态信息,因此控制器的更新计算频率会有所提高.
3.2 网络通信的影响分析
虽然事件触发一致性控制方案的设计使得MASs 信息传输频率降低,但随着智能体的规模扩大以及任务环境的复杂性提高,MASs 仍无法完全避免通信网络出现传输时滞、数据丢包等现象. 因此研究网络通信情况对事件触发一致性的影响也是必要的.
对于传输时滞和数据丢包的现象,事件触发一致性控制方案的设计主要考虑存在固定时延[27,50]、时变时延[51-52]和随机时延[53]的情况,以及数据丢包发生在通信网络间[51]、传感器内部[54]、事件检测器和控制器之间[55]、控制器内部[56]的情形. 这些研究都是从通信问题的表征着手.
造成通信网络存在传输时滞、数据丢包的主要原因是,网络传输数据过多但通信带宽有限造成了网络连接满负载的情况. 为进一步减少数据传输的负载,信号量化技术可对原始状态信息进行编码和量化,降低数据存储的大小. ZHANG 等[57-58]分别在连续监听和固定周期采样的事件触发机制中应用均匀量化器和对数量化器,使得智能体的状态收敛到有界域内. ZHANG 等[57]还将经过量化和未量化的MASs 事件触发频率进行对比,结果表明使用量化信息的事件触发机制的触发次数更少. 针对应用均匀量化器的MASs,WU 等[59]设计了不依赖状态的事件触发方案,使系统实现了有界一致性. 信号量化虽然能在事件触发一致性控制的基础上进一步降低资源消耗,但会降低一致性表现.
3.3 个体动态特性的影响分析
实际物理对象的动态是高动态、复杂的,因此以一阶、二阶线性MASs 为主要研究对象的事件触发一致性在实际应用中存在局限性. 为更好地将物理实体的特性映射到被控对象的数学模型上、更准确清晰地描述物理现象,事件触发控制需要研究由分数阶或非线性个体组成的MASs.
分数阶MASs 主要应用Caputo 分数阶微分的概念和性质建立个体的动力学方程并实现相关理论证明,但其所设计的事件触发一致性协议和事件触发函数的形式仍旧是整数幂形式. 例如,WANG 等[60]和YE 等[61]在分数阶MASs 中分别设计了集中式和分散式的不依赖状态事件触发控制方案,使智能体能够实现跟踪一致性;REN 等[62]则研究了分数阶MASs 依赖状态的分布式事件触发机制和自触发算法.
为在非线性MASs 中设计合适的事件触发方案,往往假设动力学方程的非线性项满足Lipschitz 条件.GIRARD 等[63]针对具有非线性动态特性的智能体,提出了含有自适应动态项的集中式事件触发机制,所设计的一致性协议能够在给定非线性项满足Lipschitz 条件假设下使系统实现渐近一致. PENG 等[64]则在非线性MASs 中,将依赖状态和不依赖状态的两个分布式事件触发函数进行集成,设计了基于采样数据的集成式事件触发方案. 当智能体动力学的非线性项是不确定的或未知的,事件触发一致性的理论推导已经无法通过给定条件给出. 针对MASs具有未知光滑有界的非线性动态时,YANG 等[65]利用神经网络中多个已知激活函数的线性组合去逼近非线性项,所设计的含有神经网络训练权重结果的事件触发控制方案能使系统实现一致. ZHANG 等[66]则应用RBF 神经网络估计未知光滑非线性函数,设计了解决n阶非严格反馈MASs 跟踪问题的事件触发控制方案. 除神经网络技术外,ZHENG 等[67]和LI[68]还使用模糊逻辑系统去处理智能体动力学的未知光滑非线性项,研究自适应分布式事件触发一致控制方案.
3.4 外部作用的影响分析
在实际工程中,物理设备会产生噪声,控制和传感等零件的输出量会受到限制,物理攻击或其他原因也会使MASs 控制出现故障. 为了将事件触发一致性理论推广应用于工程中,事件触发一致性控制方案的设计需要考虑噪声、饱和和故障等情况的发生.
在MASs 对噪声模拟中,往往假设智能体动力学方程存在有界随机变量,在随机因素作用下系统不能以一般收敛方式实现状态一致. 例如,HU 等[69]和SU 等[70]针对含有独立标准白噪声MASs 设计的集中式事件触发控制方案使系统以均方收敛的形式实现状态一致.
当系统的控制器或传感器存在饱和时,系统控制输入或测量输出的大小被限定在一定的范围内,会影响系统的稳定性. WANG 等[71]和MA 等[72]分别针对控制输入和传感输出饱和的现象,设计的分布式事件触发方案解决了一致性问题.
MASs 会在实体物理层面和通信层面发生故障,影响系统的控制性能. 实体物理层面中,事件触发一致性主要关注执行机构发生故障的情形. 为解决因执行机构故障导致未知的执行效率降低以及执行动作发生偏移的问题,LUO 等[73]和XU[74]提出了自适应的事件触发一致性控制方案. WANG 等[75]则研究了已知执行机构故障间歇发生下的不确定非线性MASs,通过状态估计未知期望轨迹信息并设计分布式的事件触发函数和自适应的事件触发一致性协议,实现了对期望轨迹的跟踪. 通信层面发生的故障是由外部攻击产生的,例如拒绝服务攻击和欺骗攻击,会使控制器无法接收到正常的传输数据. 在拒绝服务攻击发生下,PENG 等[76]提出了非脆弱的基于采样数据的分布式事件触发方案,所设计事件触发机制使得在拒绝服务攻击的间隔内至少会发生一次事件触发,保证系统的一致性;XU 等[77]和PENG 等[78]利用估计器分别设计了点对点通信事件触发机制和混合事件触发机制,能够保证MASs 在一定攻击频率和间隔设置的前提下安全地实现一致性. 针对可篡改信息的欺骗攻击,王誉达等[79]设计了考虑给定欺骗攻击发生概率的分散式事件触发一致性控制方案.
面对因自身发生故障或者受到攻击而传播错误信息的恶意智能体,可通过忽略异常状态信息剔除恶意节点对一致性的影响. 基于该思路,WANG 等[80]和AMIRIAN 等[81]分别应用MSR(mean subsequencereduced)算法和W-MSR(weighted-MSR)算法,设计了事件触发弹性一致性控制方案.
4 Zeno 行为的研究现状
证明MASs 事件触发一致性的方法主要有两种:一种方法是直接利用矩阵论和图论等数学知识直接推导目标状态的收敛特性[21];另一种方法是是应用Lyapunov 稳定性理论分析系统一致性表现. 在保证事件触发一致性的控制性能后,需要给出排除控制方案出现Zeno 行为的分析,目前有两种思路.
思路一:直接证明事件触发间隔的下界严格大于0,以保证有限时间内不会发生无限次触发. 文献[5,63]应用微分方程中的比较定理给出测量误差的上界,并与事件触发的边界条件进行联合求解,验证了最小触发间隔的存在性. FAN 等[9]则通过对测量误差求导,利用微分的基本概念和事件触发条件,直接得出触发间隔正下界的数值.
思路二:利用反证法间接证明Zeno 行为不会出现. 文献[26,82 - 83]利用反证法和触发信息证明不存在触发时间序列收敛的智能体. 根据Zeno 行为的定义,YU 等[84]将验证目标定位为相关状态有限时间的收敛性,推导得出发生Zeno 行为的智能体集合为空集.
事件触发机制的设计决定了事件触发一致性方案的控制效果和触发效率. 为避免Zeno 行为,连续MASs 可以应用基于采样数据的事件触发方案,一般MASs 可以采用包含驻留时间或者间歇通信的混合触发机制,但这两类方案会导致事件检测器对系统部分关键数据的忽略. 仅与时间相关的阈值函数可以排除Zeno 行为,但其构建的事件触发机制缺乏对邻居智能体状态的敏感性. 含有常数项的事件触发函数也能保证Zeno 行为不会发生,却只能使系统实现有界一致性. 因此,应用上述避免Zeno 行为的触发机制会对事件触发效率或者一致性控制性能有影响.
对目标状态进行连续监听、阈值函数依赖状态且不含常数项的分布式事件触发方案,能够使得事件检测器对自身和邻居智能体的状态进行充分利用.但一般的分布式事件触发方案无法有效避免Zeno行为. 针对一致性问题,DIMAROGONAS 等[5]设计的事件触发条件如下.
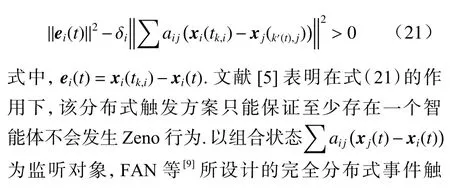
式(21)形式的动态事件触发方案能够有效避免Zeno 行为,且其触发间隔会随着一致性误差的减小而增大,比一般的静态事件触发方案更高效.
5 MASs 事件触发一致性的应用
MASs 事件触发一致性主要应用在以无人机、机器人、航天器等实体为对象的编队控制和姿态控制问题中. ZHOU 等[85]针对随机切换通信拓扑的多四旋翼无人机系统,研究了动态事件触发编队跟踪一致性方案. 苏博等[86]设计的基于自适应模糊干扰观测器的事件触发编队控制方案,提升了多自主水下机器人的编队效率. NAIR 等[87]为存在干扰的多机器人系统设计了事件触发的快速有限时间收敛积分滑膜控制器. VILLARREAL-CERVANTES 等[88]针对多移动机器人系统的编队控制问题设计了周期事件触发控制策略,显著减小了控制更新的频率. MU 等[89]考虑时变通信延迟,提出了多移动机器人的异步周期事件触发交会控制方法. 针对非完整移动机器人,YANG 等[90]研究了无速度测量信息的事件触发编队跟踪方案. YI 等[91]考虑航天器执行机构故障和外部扰动,设计了分布式事件触发航天器编队自适应容错姿态一致性算法. XU 等[92]对存在模型不确定性、外部扰动和通信受限情况下的航天器编队姿态同步跟踪问题,提出了分布式自适应事件触发控制律. 基于卫星编队的Euler-Lagrange 姿态动力学模型,王智鹏等[93]研究了分布式事件触发的相对姿态自适应控制算法.
除此以外,事件触发一致性还被应用于传感网络滤波器[94]的设计,神经网络[95]和基因调控网络[96]的同步问题研究,以及微电网的电压同步[97]和无功功率平衡[98-99]的方案设计.
6 研究展望及结束语
① 在边一致性框架下设计事件触发方案. 在当前的研究中,点对点事件触发通信是建立在对边状态信息监听的基础上,其对应的控制方案目标是实现所有智能体个体状态同步. 个体状态的同步目标实际上可以转换为对边状态收敛于0 的要求,如文献[100]. 直接在边一致性的框架下设计有效的事件触发方案仍待研究,且边一致性的视角能否为边事件触发方案的设计提供更多的思路和灵感也值得商榷.
② 设计完全分布式的事件触发一致性方案. 一些分布式的事件触发方案的控制增益和触发参数设计仍旧需要部分全局信息,例如智能体的总数和通信拓扑对应的拉普拉斯矩阵信息等. 而依赖全局信息设计的控制方案不利于在大规模系统中应用. 因此,设计真正完全分布式的事件触发一致性控制方案也是一个挑战.
③ 在两跳或多跳通信下设计事件触发一致性方案. 针对存在恶意节点的MASs,YUAN 等[101]基于两跳通信方式,设计了拥有分布式检测能力的弹性一致性方案. 虽然在YUAN 等[101]中两跳通信的应用提升了系统可靠性,但同时也增加了通信传输负担.此时,应用事件触发技术降低两跳甚至多跳通信下MASs 分布式一致性控制方案的通信频率就显得尤为重要.
④ 事件触发控制方案在大规模集群的实物验证. 事件触发一致性在大规模编队、集群等方面均有理论研究和仿真实验,但其半实物或者实物验证比较少.
