基于倾斜航空摄影技术的三维实景建模研究
2022-10-25张海军
赵 坤,张海军,田 骞
(河南省资源环境调查二院,河南 洛阳 471000)
对于三维实景建模,国内外学者进行很多研究,文献[1]采用多视航空影像技术,对城市进行了三维建模,通过倾斜摄影测量数据的预处理,把多视影像中提取的建筑物墙面纹理映射进入相应的模型,建立建模区域的三维模型。文献[2]从实景测量中提取道路三维线形数据,采用自编程序,把数据转化为仿真文件的新建模方法,新模型中在不同交通流情况下对车道坡度变化更敏感,与实际交通状态的模拟精度及仿真参数的精准度更高;文献[3]通过纹理映射技术实现三维模型的着色,对实地测量及三维模型精度进行了研究,采用多视影像技术,又花了影像数据的纹理布设,研究误差符合《三维地理信息模型数据产品规范》中Ⅰ级1∶500成图比例尺三维模型产品规定;文献[4]从模型建模完整性及控制点点位精度2个方面,对比分析了2种不同航线建筑物三维模型的建模质量,研究可为城市三维建模时航线规划提供辅助决策。
基于此,本文以新安县城乡规划为例,采用倾斜航空摄影测量、实景建模技术,实现了三维实景建模,模型精度符合设计要求。
1 工程概况
新安地处豫西浅山丘陵区,境内地形复杂,山地、丘陵、河谷川地等各类地形齐全。地势自西北向东南、自西向东逐渐降低。纵观全貌,黄河横于北,秦岭障于南,中间四山(荆紫山、青要山、邙山、郁山)夹三川(青河川、畛河川、涧河川)。总的特征是:“山高,岭多、河谷碎,七岭、二山、一分川”。根据新安县自然资源局及设计要求,此次三维实景建模的范围包含新安县城市规划区和洛新产业聚集区(磁涧镇)两部分,建模总面积92 km2。具体范围如图1所示。
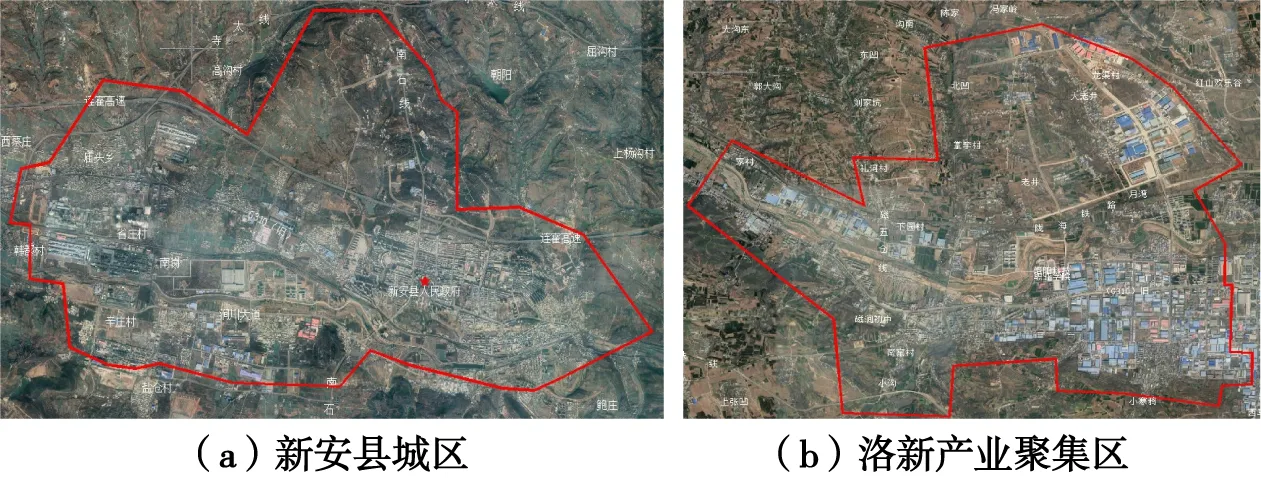
图1 新安县城区和洛新产业聚集区建模范围Fig.1 Modeling range of Xin′an County urban area and Luoxin industrial cluster
2 首级控制测量
为保证测量成果的精度,在新安县D级GPS网的基础上新布设了22个E级GPS点作为本次测量工作的首级控制。
2.1 选点埋石
(1)选点。①所选点位便于安置接收设备和操作,视野开阔,视场内障碍物的高度角不超过15°。②点位选在地基坚实且适合GPS观测并有利于长期保存的稳定区域。③点位远离大功率无线电发射源(如电视台、微波站等)其距离不小于200 m;远离高压输电线,其距离不小于50 m。附近无强烈反射卫星信号的物件(如大型建筑物、广告牌等)。④点位选择在交通方便、有利于安全作业、点位附近无大面积的水域或其他强烈干扰卫星信号接收的物体。⑤点的布设应考虑到图形结构,均匀分布。
(2)埋石。测区E级GPS点采用钢钉标志,圆盘标志面直径为40 mm,标石中心设置“十”字金属钢钉标志,标志直径12 mm,长度20 cm,采用电钻在水泥路面上钻直径为12 mm的孔,打入钢钉标志,钢钉四周采用红色油漆绘制方框。
实地绘制点之记,应确认点号、点名无误、量取并记录标石中心距周围3个以上明显地物的距离,略图绘制与实地方位一致。
2.2 E级GPS网外业观测
(1)仪器设备。本区控制测量采用三鼎T20T测地型GPS接收机4台(套)进行野外数据采集,仪器设备使用前经“河南省计量科学研究院”检校,精度精度满足要求。
(2)外业观测指标与方法。外业采用边连接方式进行观测,为了更有效地提高野外观测效率和数据采集的准确率,外业观测技术指标如下:卫星高度角≥15°;有效观测卫星颗数≥4;观测时段数≥1.6;时段观测时间≥45 min;数据采集间隔5 s。
观测人员严格遵守调度命令,按要求进行时段数据记录,保证同一时段同步观测时间充足。技术要求如下:①GPS接收机垂直架设在标石上方,使用对点器对中,其对中误差不大于1 mm。②从接收机的3个方向各量取1次(3次误差小于3 mm)天线高取平均值,作为1个观测值。每个时段观测前、后按此方法各量取1次,观测前、后2个测段所得高度取平均值作为最终天线高。③开机后及时观察仪器各指示灯的变化,判断观测数据记录状态是否正常。④观测期间不在接收机附近50 m范围内使用电台,不在10 m范围内使用对讲机或手机。⑤当天外业工作结束,及时将数据传输到计算机,分时段按文件夹存放,并做好备份。
2.3 基线解算
全网共观测总基线数90条,平均边长3.278 km。①观测值残差控制在±0.25周以内。②RMS均方根误差表明了观测值的质量好坏,依据经验观测落在1.96倍RMS的范围内的概率是95%,此次GPS基线解算RMS值控制在0.02 m以下。③RATID(置信度)反映了所确定出的包含未知数的可靠性,此次GPS基线解算RATID设置为95%。④RDOP值的大小与基线位置和卫星在空间中的几何分布及运行轨迹有关,当基线位置确定后,RDOP值就只与观测条件有关的,而观测条件又是时间的函数,因此,RDOP值只要保证足够的观测时间段就能够满足基线解算要求,本次外业观测中,每个时段观测量都大于50 min。⑤在基线解算时,如果观测值的改正数大于某一个阈值,则认为该观测值含有粗差,就需要将其删除,此次GPS基线解算同时段数据剔除率均小于6%,符合《规程》10%的要求。
3 倾斜航空摄影测量外业
3.1 测区分区
该项目航测范围大,区内地势起伏较大。根据测区地形及建筑分布,在满足设计要求及保证质量的前提下,对项目任务区进行区域划分,逐区域进行航拍作业。具体分区情况见表1。

表1 具体分区情况Tab.1 Specific division
3.2 像控测量
(1)像控点布设。像控点测量是为了保证空三的精度、确定地物目标在空间中的绝对位置。项目像控点在E级GPS网的基础上基于HNCORS网络RTK技术施测。一般情况下布设均为平高点[5-9]。有差分POS数据的可以放宽到40 000个像素,没有差分POS数据的至少20 000个像素布设一个控制点。项目采用的无人机中M300具有差分POS数据,其他两架没有差分POS数据,为了确保空三的精度,采用了20 000个像素1个控制点的选点间隔。
(2)像控点选点。像控点均选择在易于判别、交角良好的细小线状地物的交点、明显地物拐角点等位置固定且便于量测的地方,或在地面绘制“L”形符号,符号宽度不小于15 cm,边长不小于80 cm。点位选择在高程变化较小的地方,易于准确定位和量测,施测时统一以“L”形符号外角为基准。
(3)像控点联测。像控点联测采用基于HNCORS的网络RTK作业方式联测。利用E级GPS网作为起算点。GPS网络RTK作业时遵循以下要求:①RTK观测前应设置平面收敛阈值不超过2 cm,垂直收敛阈值不超过3 cm;②观测次数≥2,每次观测重新初始化;③采用对中杆对中整平,每次观测历元数不少于10个;④各次测量的平面坐标分量校差不大于2 cm,高程校差不大于3 cm,各次结果取中数作为最后成果;像控点联测结束后的坐标及时展点检查,防止出现粗差,确保内业数据处理中的空三加密顺利进行。像控点布设施工如图2所示。

图2 像控点布设施工Fig.2 Layout and construction of image control points
3.3 倾斜航空摄影
(1)航高确定。无人机倾斜摄影的航高是航线设计的基础。航摄高度根据任务要求选择合适的地面分辨率,并结合倾斜相机的性能。航高按式(1)计算:
H=f×GSD/a
(1)
式中,H为航摄高度;f为镜头焦距;a为像元尺寸;GSD为地面分辨率。
此次航摄航高最高为168 m。
(2)航摄重叠度确定。《低空数字摄影测量规范》规定“航向重叠度一般应为60%~80%,最小不小于53%;旁向重叠度一般应为15%~60%,最小不小于8%”。在无人机倾斜摄影测量中,旁向重叠度远远不够,本次航摄采用航向80%和旁向70%的重叠度。
(3)摄影时间选择。根据地形条件、气象条件和本地特点,多选择在9:00—16:00进行,以减小相片中阴影面积,并避免在大风、阴天、下雨及能见度不好的天气情况下飞行。
(4)航摄质量控制与保障。项目航飞过程中,严格遵守以下要求:航拍前,飞手详细了解测区的地形、气象、交通等信息,认真学习项目实施方案,作好进场前的各项准备。外业飞手了解测区空域情况,熟悉周边机场位置和现场空中管制及通信联络方式、要求。飞行中采用GPS导航系统,按照航线设计数据飞行,航摄时,飞行姿态平稳,旋偏角、航偏角未超过规范要求。
(5)整理与质量检查。当天外业结束后外业人员及时对航片进行整理,分镜头存储、备份。并检查影像是否曝光过度或不足、影像是否重影、散焦与噪点,确保航片清晰、反差适中、颜色饱和、色彩鲜明、色调一致,能够清楚辨别与地面分辨率相适应的地物影像。
(6)内外业数据移交。外业移交数据包括:POS数据、原始照片、像控点坐标、像控点点之记、差分数据。如果飞机架次较多,则按日期、架次分好文件夹。内业人员在接收时,对上述数据进行核查。
4 倾斜航空摄影测量内业
4.1 数据预处理
由于倾斜摄影相机装备了多个不同朝向的相机,造成了摄影倾角大,影像变形较大;分辨率变化大,尺度无法统一;重叠数多,需要多视处理等特点。在拍摄曝光的瞬间,相机所拍摄的角度不一致,就必然会出现光线反差、强度等的不一致;这样就有可能导致出现同一地物影像在不同相机下的色彩、明暗程度出现差异,最终影响到三维模型的精度和效果。所以在空中三角测量前,先对原始影像进行预处理,对原始影像进行色彩、亮度和对比度的调整和匀色处理。匀色处理应缩小影像间色调差异,使色调均匀,反差适中,层次分明,保持地物色彩不失真,无明显匀色处理的痕迹。解决测区局部反差较差等颜色问题,以减弱因为光线、阴影等因素的影像。
4.2 空三作业过程
4.2.1 相片刺点
将野外测量的控制点信息,按照实际位置刺到自动建模系统中。刺点时,根据影像分辨率和控制点标志的大小,估算角点所占像素,把影像缩放到合适的大小完成刺点。
4.2.2 空三计算
(1)相对定向。空三过程中配合外业控制点文件及点之记、原始影像及相机文件,使用ContextCapture Center三维建模软件,将相机参数、影像数据、POS数据进行多视角影像特征点密集匹配,并以此进行区域间的自由网多视影像联合约束平差解算,建立在空间尺度可以适度自由变形的立体模型,完成相对定向。
(2)绝对定向。计算机完成自动相对定向后进行人工选点、刺点,人工刺点一般选取在距离影像边缘超过80个像素范围内、目标清晰的点位,减少照片边缘畸变较大带来的影响。利用这些点对已有区域网模型进行约束平差解算,将区域网纳入到精确的大地坐标系中,完成绝对定向。空三结束后,查看精度报告,分析误差原因并校正,直至空三成果符合精度要求,最终利用空三成果进行下一步模型重建工作。具体步骤如图3所示。
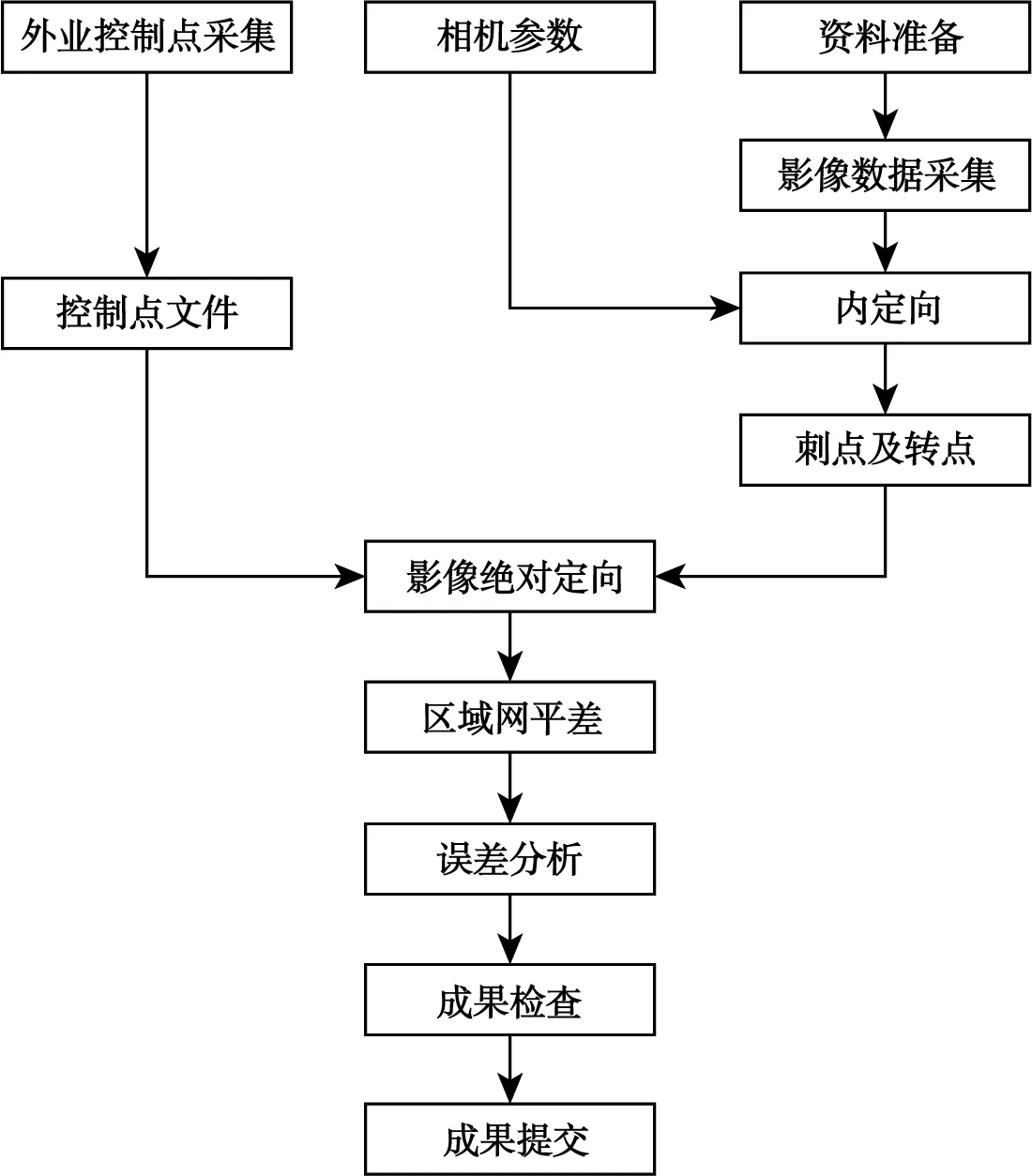
图3 ContextCapture Center空三流程Fig.3 ContextCapture Center aerial triangulation process
(3)空三误差检查标准。①相对定向精度。采用数据处理软件,其相对定向指标采用反投影误差来表示。连接点的反投影中误差为需要优于1 个像素,最大残差3 像素。每个像对连接点分布均匀,相对定向每个像对连接点数目大于一定数量。②绝对定向精度。采用光束法区域网平差进行空中三角测量平差,区域网平差计算结束后,基本定向点残差,检查点误差不大于设计要求限差及中误差。
(4)空三报告。新安县城市规划区内部分测区空三报告主要内容如图4所示。
4.3 全自动三维建模和模型修饰
采用多机多节点并行运算的ContextCapture Center软件进行全自动三维建模。
4.3.1 三维重建
对于测区的海量数据,采用切块分割的方式将加密数据分割成数块。将空三后的成果数据直接提交生成三维TIN格网构建、白体三维模型创建、自助纹理映射和三维场景构建。由于倾斜摄影能够获取详细准确的影像与地理信息,再加上先进的定位技术所获取的影像都具有精确的坐标信息,通过纹理映射,可自动迅速地将影像纹理贴在相对应的三维模型面上,以此生成基于影像纹理的高分辨率倾斜摄影三维模型。新安县城市规划区内部分测区三维重建如图5所示。
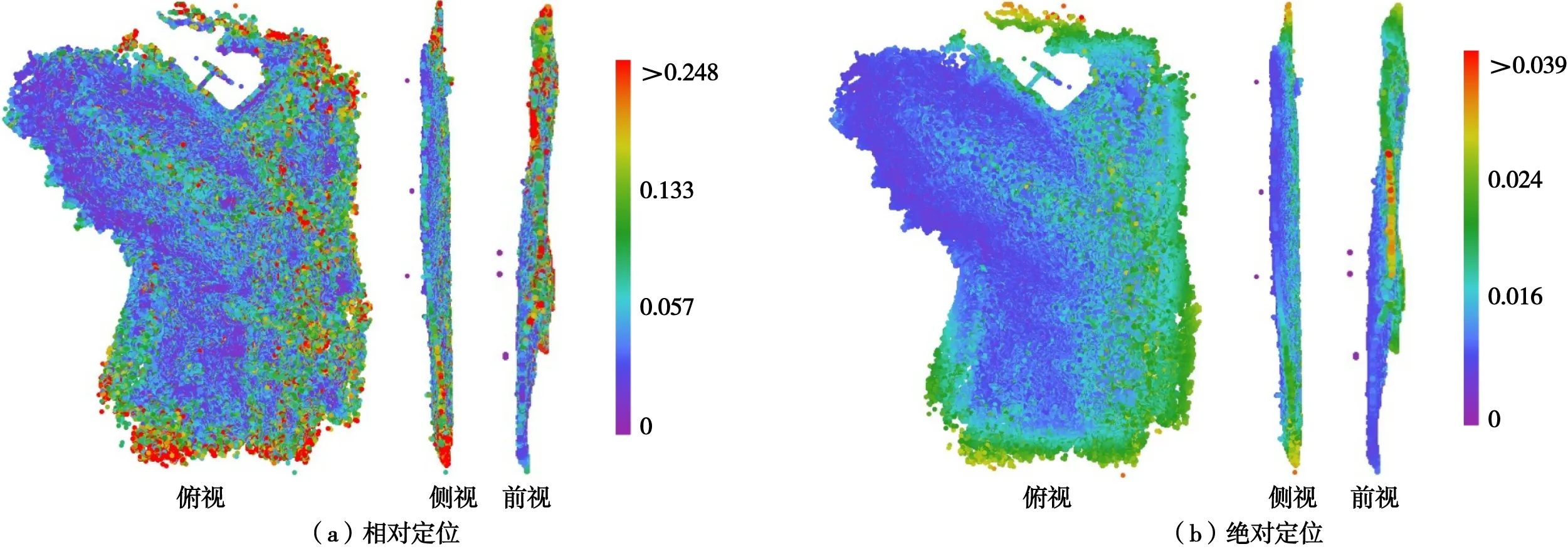
图4 新安县城市规划区内部分测区空三报告主要内容Fig.4 Main contents of the aerial three report of some survey areas in the urban planning area of Xin′an County

图5 新安县城市规划区内部分测区三维重建Fig.5 3D reconstruction of some surveyed areas in the urban planning area of Xin′an County
4.3.2 模型的修复与编辑
在全自动实景三维建模的过程中,由于水面、玻璃面反光,建筑物、广告牌等一些特殊地物在空三加密时无法匹配到正确的连接点或者匹配生成的模型有较大变形时,会导致生成的三维模型出现漏洞或模型扭曲。模型修饰原则上只对水域空缺或模型漏洞进行修补,采用ContextCapture Center软件和水面或补飞数据进行约束干预后重新生成模型,使模型不存在明显漏洞。
5 展示平台建设及功能
为更好展示项目实景三维模型成果,提升项目成果服务质量,应新安县自然资源局要求,搭建了项目成果展示平台。
5.1 模型数据导入
(1)数据处理。由于最终三维模型成果OSGB格式数据量为1 TB左右,针对实景模型的海量数据对平台的承载与快速调用的问题,采用数据搭建技术对零碎的实景模型数据进行整合,转换适宜平台运行的数据格式,以提高其调用效率。在构建大规模场景方面,采用可见性判定与消隐技术、LOD技术和纹理映射技术、减少内存的消耗来提高系统的承载能力和场景漫游速度。
(2)模型融合处理。根据实际使用需求,本平台提供了规划仿真三维模型的导入及展示功能。为实现该功能,针对规划仿真三维模型与实景三维模型融合问题,制定了统一的数据提交格式与要求。依据现实情况,采用OBJ数据格式作为规划仿真三维模型的入库数据标准格式,进行平台内管理、分析功能的实现。
5.2 平台主要功能
5.2.1 三维交互式浏览功能
平台提供灵活、交互式的浏览漫游功能,包括:①灵活的运动控制模式,提供鼠标、键盘等进行控制,用户可以在三维场景中前进、后退,改变行走方向,升高、降低视点。②多种浏览方式。提供行走、驾驶等浏览模式。
5.2.2 三维实体创建功能
平台实现交互式快速三维几何实体造型工具,利用简单图元或三维矢量数据构建复杂的三维实体,三维实体的修改、删除、旋转、缩放,对三维实体表面贴图、设置纹理、颜色。系统对人工三维模型支持以*.OBJ的数据格式为标准。*.OBJ格式相比其他三维数据格式,在通用性上有较大的优势,这样能使平台得以支持很多不同的建模软件制作的三维模型数据。
5.2.3 三维查询分析功能
(1)搜索定位功能。在搜索对话框中输入所要搜索的地名,系统将快速地搜索到该地名,并可执行飞往或跳往到该地物,并显示该地物。
(2)三维分析功能。根据相应功能键,实现地形等高线、地形剖面,地形通视分析、日照分析、视域(可视)分析和空间辐射分析等。
5.2.4 空间量测统计功能
(1)一般量测功能。测量点间的水平距离、直线距离,并计算其起点和终点间的高差和坡度,测量物体的垂直距离,测量地面面积。
(2)影像拍摄功能。系统还提供指定窗口内的影像拍摄,并保存、打印和输出。
5.3 平台未来扩展功能
(1)可视化历史资料的浏览、查询与保存。为今后研究城市的变迁与发展储备真实的、科学的信息。利用系统中备份功能,可把每一阶段、每一时期的城市发展变化三维立体资料加以储存,为整个城市的发展留下宝贵的历史演变资料。可以直观看到建设前现状、规划成果和建成后真实景观。
(2)可视化三维数据的应用:系统不仅应用于规划的编制与实施管理,也为社会和其他政府部门提供三维地图数据和技术支持。从而达到全市公安应急指挥调度的准确化,城管管理的网格化,电力网线区域分控的安全化,消防救灾调度的及时化,电信网络布点的程序化,水利排涝系统的合理化,交通状况控制的全局化水平,从根本上实现城市数字一体化管理进程。依据各部门合实际业务需求,充分挖掘三维数据的使用价值。
(3)网络发布功能。实现网络发布技术,可以将海量的数据发布在政府内部网络上运行。能通过网络发布版本依照权限及职能进行简单漫游、规划查询、行政审批与管理等多种应用功能。
6 精度统计及质量评价
6.1 检查方法
外业对建模区域地面特征点进行施测,利用三维模型浏览平台对比野外检查点位置在模型上测取检查点坐标。内业进行平面及高程精度比对分析,验证成果能否满足规定的技术指标要求。精度检测时,中误差计算按下式执行:
(2)
式中,M为成果中误差;n为检测点(边)总数。
6.2 精度统计
通过全测区野外测量,共抽取检校点1 311个。其中县城区域抽取特征检校点265个,进行平面和高程误差双重检校,抽取高程检校点488个,进行高程误差检校;磁涧区域共抽取特征检校点182个,进行平面和高程误差双重检校,抽取高程检校点376个,进行高程误差检校。
(1)县城区域的精度评价分析。特征检校点平面中误差0.034 m,高程中误差0.081 1 m,平面最大误差值0.098 7 m,高程最大误差值0.176 0 m;高程检校点高程中误差0.091 8 m,高程最大误差值0.178 5 m。
(2)磁涧区域的精度评价分析。特征检校点平面中误差0.041 1 m,高程中误差0.088 5 m,平面最大误差值0.104 0 m,高程最大误差值0.187 2 m;高程检校点高程中误差0.983 0 m,高程最大误差值0.187 2 m。
7 结论
(1)运用倾斜摄影、实景建模等技术,最终完成新安县城市规划区及洛新产业聚集区实景三维模型重建面积92 km2。通过搭建展示平台,实现了任务区内三维实景漫游与显示。
(2)实景三维模型数据成果经三级检查验收,模型精度符合合同及设计要求,进一步完善了新安县基础地理信息数据。展示平台的搭建,不仅全面流畅地展示了实景的三维模型,同时可接入规划模型功能,也丰富了新安县城市规划管理系统。
