基于自适应模糊神经网络的下肢关节角度估计
2022-10-25刘克平滕召纬孙中波李婉婷
刘克平,滕召纬,孙中波,李婉婷
(长春工业大学电气与电子工程学院,吉林长春 130012)
1 引言
中国残疾人联合会2020年发布统计数据表明,国内已有4312个残疾人肢体康复机构,其中专业技术人员19.0万人,而我国脑卒中40岁以上患者人数已达1200万,通过该数据可以得出已有专业医师人数远不足应对现有患者日益增多的情况,进而导致大部分患者失去及时治疗的机会。为解决这一问题,康复机器人和人机交互技术相继问世并受到了学者们广泛关注,但其难点在于如何利用患者的真实运动意图实现康复机器人的人机交互控制。针对上述问题,一种基于肌电信号估计关节角度的识别技术随之被提出。肌电信号(electromyography,EMG)是肌肉收缩过程产生的电信号,因其蕴含人体运动的特征信息,通过进一步的解读即可识别人体运动意图,从而可以开展针对性的意图康复训练。现如今意图识别的主流趋势为基于人体表面肌电信号(sEMG)的意图识别,所识别结果的准确性直接影响患肢实际的康复训练。
基于此,近年来国内外学者提出多种方法实现sEMG的估计,如神经肌肉骨骼模型、线性模型、支持向量机(SVM)方法和人工神经网络(ANN)。上述方法都是针对具体应用场景进行设计,实验结果表明能满足设计时所提要求。K.K.K. Terry等人提出的神经肌肉骨骼模型依赖大量生理参数,如肌肉质量、肌肉纤维长度、肌腱长度等,针对上述参数进行算法优化,模型预测结果具有较高的准确性。Y.Masahiro等人基于支持向量机和肌电信号与关节角之间的线性关系提出了一种连续的手部姿态估计方法,实验表明该方法对于运动分类具有较高的准确率,并且可以较好地估计出实验对象的关节角。N.A.Shrirao等人通过采用局部逼近和延迟学习方法对手指关节角度进行估计,实验表明该方法对假肢手的控制性能良好。李锋等人提出了一种基于RBF神经网络的迭代学习控制方法,即使在未知的外界干扰下,实现了下肢康复机器人的步态跟踪。
基于此,为了进一步提高下肢髋、膝、踝三关节角度的预测精度,本文提出一种基于自适应模糊神经网络的下肢关节角度预测模型。首先进行信号采集与处理,采集人体下肢三关节的表面肌电信号,测量实际运动时的角度信息;利用滤波技术进一步处理采样数据得到模型输入样本。其次结合混合策略和反向误差传播算法进行模型参数的自适应调整,实现对下肢三关节角度的预测。最后通过Matlab进行仿真,实验验证本文所提出的AFNN模型相比BP和RBF神经网络预测模型在意图识别过程中具有更好的预测精度。
2 数据处理和方法提出
2.1 表面肌电信号信号采集
表面肌电信号能在一定程度上反映肌肉运动时的活动状态,通过对其进行相应的时、频域分析可以得到时、频域特征与相应肌肉特征以及运动的相关性,得出人体运动时的肌肉功能状态。通过实验获取了人体下肢运动时股直肌(VR)、股外侧肌(VL)、长伸肌(EP)相应的表面肌电信号,同时对髋、膝、踝三个关节角度进行测量并记录。为了提高所测量数据的准确性,使用美国BIOPAC公司开发的MP160肌电信号采集装置获取人体下肢运动时各肌肉对应的肌电信息,并结合中国汇通公司生产的WT901C485角度传感器采集下肢三关节角度数据。进行数据采集时需要一名四肢健全的行走者进行相应的腿部屈伸运动,将此时所测量数据作为模型的预输入数据,如图1所示。

图1 表面肌电信号的测量
信号采集过程中易受到外界环境的干扰,为了尽可能避免外部干扰,需要对被测量人员的皮肤表面进行相应的去毛发处理,涂抹适当的电极凝胶,降低电极和皮肤之间的阻抗。sEMG采集过程中使用的氯化银电极贴间距也会对所收集的数据产生干扰,所以在本实验中选取两个相邻电极贴之间距离为2厘米,测试结果分别如下图2和图3所示。
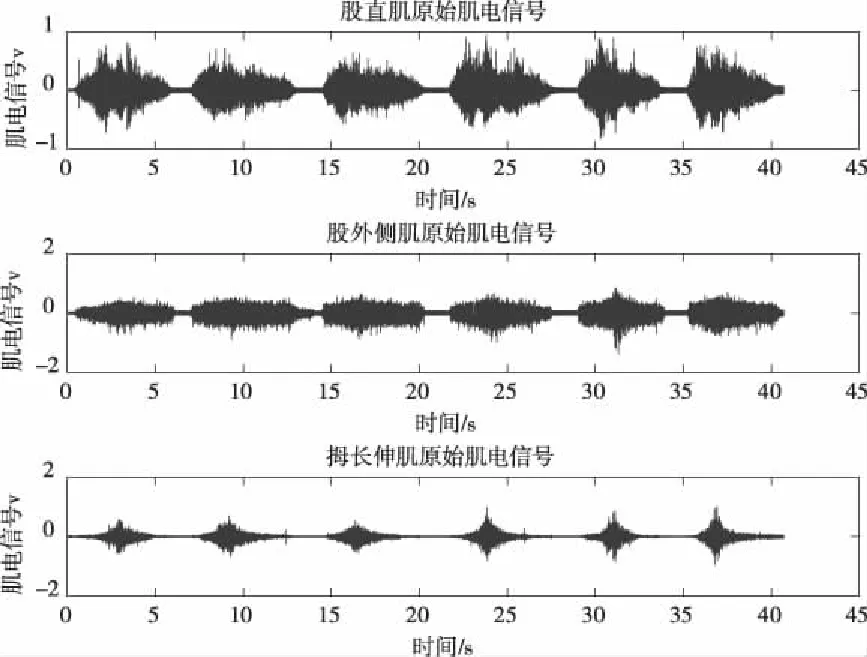
图2 原始表面肌电信号
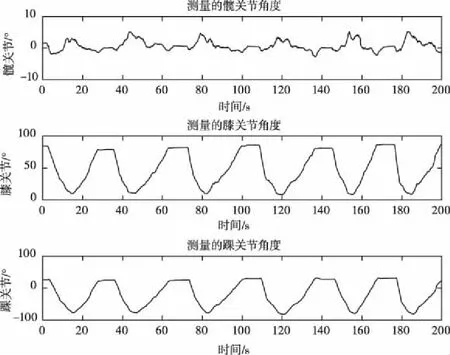
图3 实际三关节角度
2.2 sEMG信号处理
sEMG是在肌肉收缩时产生的一种微弱的电信号,其本身具有较高的随机性和不稳定性,易受到外界环境的影响。比如,测试人员的皮肤、毛发、汗液等;还易被电力系统引起的工频干扰所影响。除此之外电极贴片的位置过近也会对相邻电极片所采集信号产生叠加干扰,基于此如何进行噪声滤除成为信号采集之后的首要任务。
表面肌电信号能量高于电子噪声水平,频率范围介于0-500Hz,主要分布在50-150 Hz之间,肌电信号的最低频率为20Hz,本文通过使用低截止频率为20Hz、高截止频率为500Hz的带通滤波器滤除信号采集时的部分噪声因素。此外我国工频干扰频率为50Hz,处于可用信号能量集中范围内,因此采用50Hz的陷波滤波器消除工频干扰。
经过上述滤波环节即可得到相应噪声滤除后的表面肌电信号,尽管如此,由于该信号的振幅随机且波动较大,依旧不能作为模型输入端的可靠数据,因此需要进行进一步的滤波处理。针对该问题,本文通过如下的全波整流技术可获取更稳定的信号数据。
sEMG()=|sEMG()|
(1)
其中sEMG()作为原始的表面肌电信号,sEMG()作为经过全波整流之后的表面肌电信号。
通过对比实际关节角度信号的采样率可知实验环节采集的表面肌电信号采样率过大,因此本文对所得表面肌电信号进行次级采样。

(2)
其中为表面肌电信号的采样次数,()为次级采样后的表面肌电信号。经过上述次级采样之后,通过观察所得线性包络线可知表面肌电信号仍然具有较为严重的震荡状态,为解决这一问题,本文采用截止频率为5的一阶低通巴特沃斯滤波器开展进一步的信号处理,进而获得较为平滑的表面肌电信号。

(3)
其中为滤波器阶数,为截止频率。基于上述信号处理的全过程,最终获得的处理后的表面肌电信号如图4所示。
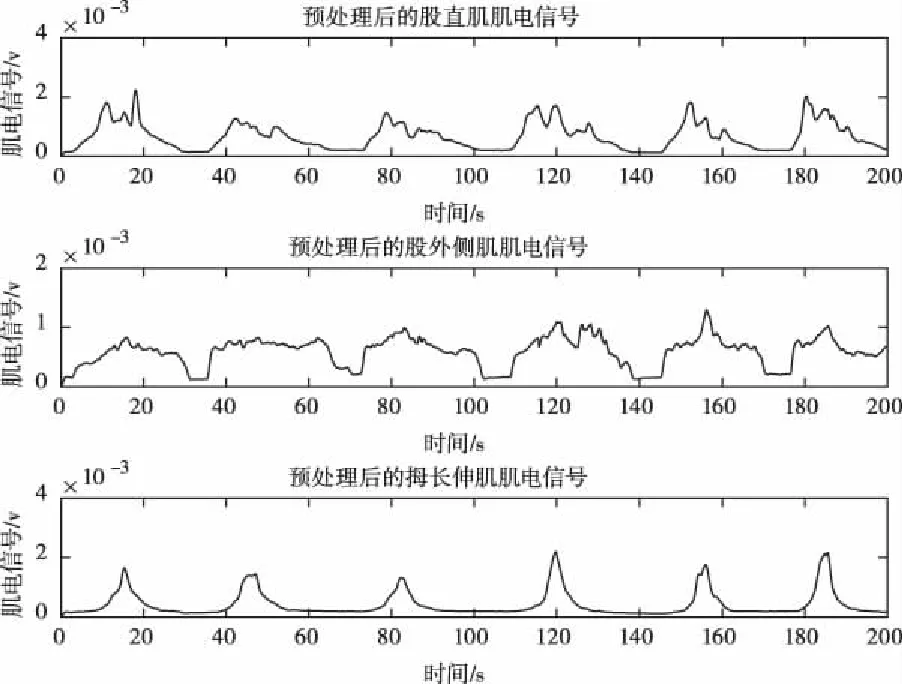
图4 预处理后的表面肌电信号
2.3 构建自适应模糊神经网络模型
231 自适应模糊神经网络结构
模糊神经网络结构结合模糊推理机制和神经网络预测思想,通过神经网络的输入、输出节点实现系统的输入、输出信号的模糊,其隐含节点表示隶属度函数和模糊规则,利用神经网络的并行处理能力大幅度提高了传统模糊系统的推理性能。模糊神经网络的结构如图5所示,分别为输入层、隶属度函数层、模糊规则层和输出层,每一层都有若干个神经元节点,相邻节点之间通过具有一定的权重比进行连接。
由于本文基于人体下肢表面肌电信号开展患者运动意图识别研究,因此该自适应神经网络结构的输入端为信号处理环节得到的表面肌电信号。整个模型的输入数据如下所示
=[,…,…,]=10000
(4)
其中为100内所测量的、、肌肉的表面肌电信号。本文将角度传感器测量的髋、膝、踝三个关节角度数据作为模型的期望输出,用于对比自适应模糊神经网络系统的预测结果,进一步验证该预测模型的可靠性,所测量实际三个关节角度值如下
=[,…,,…]=10000
(5)
其中为100所测量的实际三关节角度值,采样频率为100。

图5 模糊神经网络结构图
图5中输出层节点对应模型的预测结果,隶属度函数层节点(=1,2,…,,>0)表示输入变量的第个隶属度函数,模糊规则层节点,,…,对应不同隶属度函数的组合,将这些组合表示为条模糊规则。大多数模糊神经网络模型表示如下
(6)

(7)
(8)
因此,结合式(6)、(7)、(8),自适应模糊神经网络模型具体可以表示为如下形式
(9)
其中1≤≤为隶属度函数的维度,为输入变量维度,为神经网络模糊规则层节点个数。
输入层信号表示经过信号处理之后的sEMG,因为选取高斯函数作为隶属度函数结合中的隶属度函数中心,中的参数和参数确定隶属度函数的状态,称为前提参数。前提参数过大将促使变小,进而造成隶属度函数增大,最终导致预测结果大于实际测量值;反正,当前提参数过小时,模糊神经网络模型预测值将小于真实数据。因此,本文引入多次优化前提参数、的思想,得到最佳参数和最优预测精度下的系统模型。
模糊神经网络通常把模型中的隶属度函数组合为模糊规则,T-S(Takagi-Sugeno)模糊系统是模糊推理和模糊规则构成的一种具有较强自适应能力的非线性模糊系统模型。其模糊规则表达式如下
:=1,=2,…,=,
=0+1+…
(10)
其中,为模糊神经网络系统的模糊集合;是该模糊系统的参数;表示通过模糊规则获得的输出结果。
232 自适应模糊神经网络学习算法
模糊神经网络结构及其模型参数化表达式确定后,即可通过对其结构中的各类参数开展学习进而得到最优的预测效果。为了提高学习算法的实时性和可靠性,模糊神经网络采用混合策略,一方面通过反向传播算法优化前提参数,另一方面基于优化后的网络结构调整规则参数。具体执行过程如下:初始化前提参数,基于网络结构将输入信号传输至模糊化层,通过模糊规则获得预测结果,将该数据与真实值间的误差反向实时传递至输入端,实现前提参数的优化;利用优化后的参数更新模糊神经网络结构,得到与输出结果较匹配的隶属度函数和模糊规则,然后利用更新后的自适应模糊神经网络模型进一步优化规则参数,最终实现模糊神经网络全部参数的自适应更新与优化。
通过式6所示流程图可知由系统模型确定隶属度函数,进而可以得出初始化后的训练规则,经过部分数据训练后可基于误差反向传播理论对初始规则中的前提参数进行优化,从而得到第一次优化后的规则;进而再开展训练数据的测试,此时与真实数据仍存在误差时,将误差再次反馈到更新后的规则模块,进一步优化前提参数从而得到更加匹配的规则。与传统模糊神经网络相比,本文提出的AFNN优化算法不仅在训练过程中利用反向误差传播算法实现了前提参数的一次优化,还基于一次优化后的模糊神经网络结构进行了规则的再次优化,最终获得高精度且自适应的AFNN优化模型。
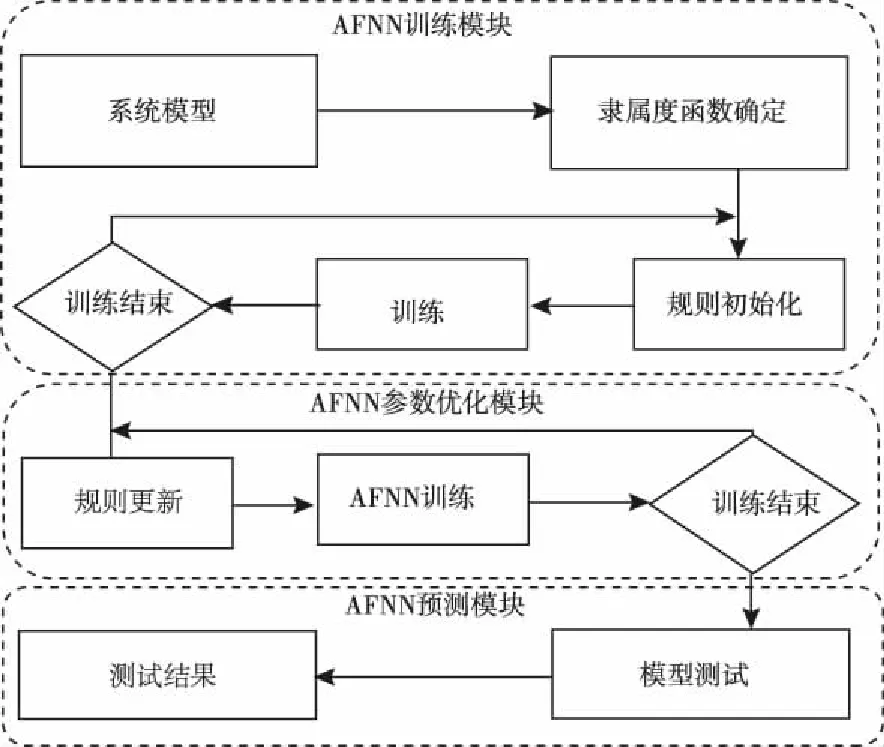
图6 AFNN的流程图
基于混合策略和学习算法的参数优化方案可以得到预测效果最优时的网络结构的规则参数,不仅优化了传统算法收敛至全局最优解的计算速度,提高了算法预测精度,进一步提升了算法运行整个过程的鲁棒性。
3 下肢关节运动意图估计结果与分析
为了验证本文所提算法对于下肢三个关节角度具有较好的预测性能,采用MATLAB2016a仿真软件,基于人体下肢表面肌电信号和髋、膝、踝三关节角度测量数据进行自适应模糊神经网络预测模型(AFNN)算法的仿真,并通过对比BP神经网络预测模型和RBF神经网络预测模型给出了在预测效果上的对比与分析。
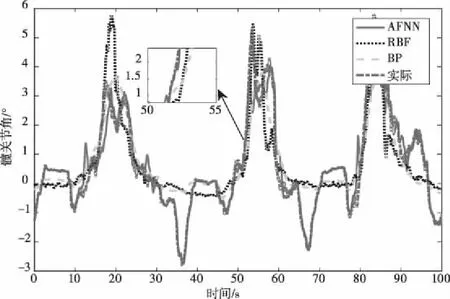
图7 基于AFNN、RBF、BP的髋关节角度与实际值对比
由图7实验结果可知:本文提出的AFNN优化算法获得的髋关节角度预测曲线与真实测量数据偏差较小,尽管在一定的时间段内存在峰值达不到的情况,但相比BP和RBF预测模型来说对于实际值跟踪效果良好,说明本文所提出的自适应参数优化方法可以通过规则参数的更新优化有效提高预测精度,特别是20-100s之间的曲线稳定性最优;而BP预测模型预测结果在20-100s之间波动较大并且跟踪效果较差,存在较大误差;RBF预测模型预测结果同BP预测模型一样跟踪效果较差,整个预测过程中曲线抖动现象明显并且在20-90s内会出现峰值过高的现象,整体表现不佳。通过对比可以看出本文所提优化算法能够有效提高预测精度,主要是因为引进了参数自适应优化机制,避免了参数的固定化,保证了跟踪效果以及准确性。

图8 基于AFNN、RBF、BP的膝关节角度与实际值对比
根据图8可以看出本文所提AFNN预测模型在100秒内跟踪膝关节过程中无明显波动,稳定性良好;而BP和RBF预测模型的估计曲线在0-10s及60s-100s之间存在一定的误差值,特别是在35s-45s之间RBF预测模型完全高于实际值而BP预测模型则低于实际值,存在较大峰值波动;尽管AFNN预测模型存在一定范围内的波动但是能够在段时间内迅速跟踪上实际值。

图9 基于AFNN、RBF、BP的踝关节角度与实际值对比
通过对图9对比可以发现本文所提AFNN预测模型在100s内所得踝关节角度预测曲线与真实测量曲线重合效果最佳,与之相比尽管BP和RBF预测模型能够跟踪上实际关节角度,但是相比曲线波动性较大且跟踪效果不理想;特别是在50s-55s之间可以看出只有AFNN预测模型能够最大限度的跟踪上实际值而BP、RBF存在着过早衰减或超出实际值的现象。
综上所述可以得出本文所提AFNN预测模型在髋、膝、踝任一关节预测效果都优于BP和RBF预测模型,特别是在踝关节预测中,效果最优,验证了本文所提算法的有效性。其原因主要在于所提AFNN在标准模糊神经网络的基础上,引入基于混合策略和反向传播算法的参数优化机制,提高算法收敛速度的同时,进一步改善了传统模糊神经网络预测精度不高的问题,也保证了系统运行时的稳定,同时验证了本文所提出的自适应算法能够使神经网络的预测精度进一步提高。
为了进一步验证本文预测模型的有效性,选取均方根误差为预测精度的指标。参数均方根误差公式见下式

(11)
人体腿部髋、膝、踝三个关节角度下三种算法的均方根误差及预测精度提高率见表1。
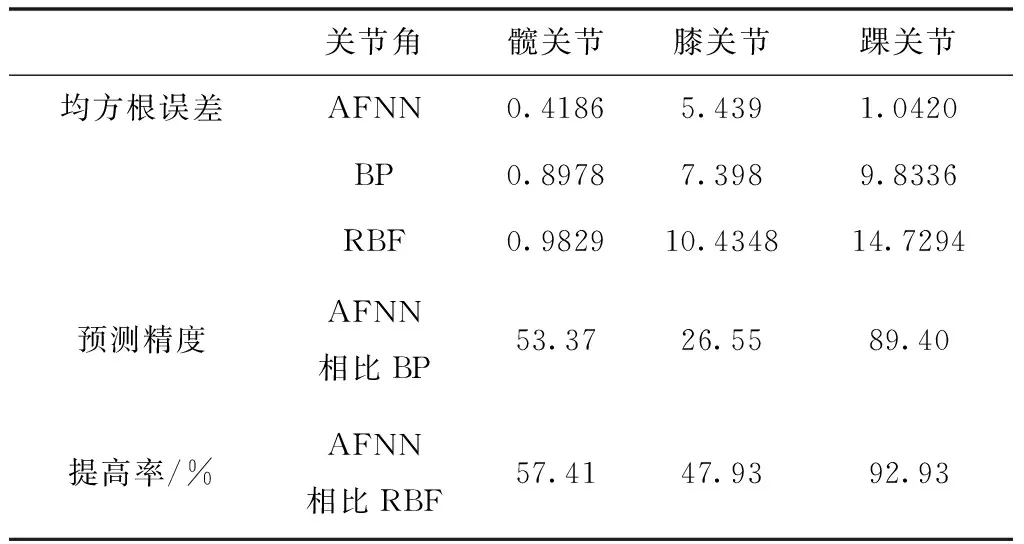
表1 两种算法的均方根误差及提高率对比
由以上数据可知,相比传统BP和RBF,AFNN的预测精度提高了53.37%~92.93%,BP在踝关节位置预测的误差为9.8336,RBF在踝关节位置预测误差为14.7294,而本文提出的AFNN模型则获得1.0420的均方根预测误差,说明本文所提模型明显改善了人体下肢关节角度预测精度不高的问题。传统BP算法仿真时间平均为24.0021s,RBF算法仿真时间平均为77.9s,本文所提算法用时为15.2021s,相比BP,本文算法的收敛速度提高了36.66%;相比RBF,本文算法收敛速度提高了80.49%。其原因在于AFNN通过自适应调整参数即时更新神经网络的结构模型,提高了算法收敛至最优值的速度,从而一定程度上降低了系统运行的时间成本。综上所述,本文提出的AFNN模型在大幅度提高预测精度的同时也减少了算法的运算代价。
4 结论
本文针对下肢康复机器人意图识别精度不足问题,利用结构参数自适应调整机制改进传统模糊神经网络模型,通过基于反向传播和误差调整的混合算法提高算法的预测性能。为了验证所提算法有效性,进行与BP和RBF模型的对比实验,结果发现本文所提AFNN优化算法预测精度提高了53.37%~92.93%,其收敛速度相比BP和RBF神经网络预测模型提高了36.66%和80.49%,证明本文所提自适应参数优化模型结合神经网络对人体下肢髋、膝、踝三个关节角度的预测性能远高于传统BP和RBF模型,尤其是在踝关节角度预测环节本文算法优越性最为明显。
综上所述本文所提改进模型能够有效提高下肢康复机器人意图识别预测精度,可为人体下肢关节角度预测提供了一种精准识别方案,下一步将会结合实际下肢康复机器人系统进行人机运动交互控制方法研究。