无线传感网络多变目标自动跟踪方法仿真
2022-10-25牛丽婷肖宛昂
张 健,牛丽婷,肖宛昂
(1. 武汉大学物理科学与技术学院,湖北 武汉 430072; 2. 中国科学院半导体研究所,北京 100083)
1 引言
无线传感网络为兼备通信与计算功能的多跳自组织网络系统,在环境监测预报、智能家居、国防军事等诸多领域被广泛应用。传感网络作为继因特网后另一个对人类生活方式产生巨大影响的技术,人们对于该网络的研究不断增加。其中,目标跟踪作为无线传感网络的关键作用之一,所面临的挑战巨大。如何有效完成目标的追踪任务,是该网络目前面临的重要任务之一。
李松等人提出时间偏差校准分布式多传感器多目标跟踪算法。该方法首先利用逆卡尔曼滤波对网络的局部航迹构造进行等效测量,针对直线运动目标,构建时间偏差测量方程;再基于伪测量的偏差估计算法,将最小二乘算法与卡尔曼滤波结合,估计网络的相对时间偏差;最后,利用时间偏差校准器实现对传感网络的目标跟踪。该方法由于未能利用机器视觉技术对传感网络中的摄像机安装位置进行具体分析,导致该方法在进行跟踪时的网络的总能耗高。
庞策等人提出多传感器协同识别跟踪多目标管理方法。该方法首先基于风险理论,构建目标识别模型;再以该模型为基础,分析影响追踪、识别的影响因素,建立目标跟踪风险函数;最后利用Agent分布算法对目标模型进行求解,从而实现传感网络的目标追踪。该方法在构建目标函数时存在一定问题,所以该方法在跟踪时跟踪轨迹与实际目标运动轨迹误差较大。
巩欣飞等人提出IPNet:帧间预测校验的多域卷积神经网络目标跟踪算法。该方法首先利用聚类算法和帧间预测方法计算网络中两个连续帧之间的目标相似度;然后利用计算结果圈定下一帧目标可能出现的候选区域,预测目标位置;最后对预测位置进行校验,通过检验结果,实现对网络目标的追踪。该方法在进行相似度计算时存在问题,所以该方法跟踪目标时的网络节点之间会发生碰撞。
为解决上述传感网络目标跟踪过程中存在的问题,提出基于机器视觉的传感网络目标跟踪方法。
2 基于目标模型的摄像机位置与变形度关系分析
设定传感器的节点总数为,监测区域为×,将网络中各个节点的坐标为(,),∈{1,…,};传感器网络需随机布置在监测空间内,且需对空间区域完全覆盖;保证目标身处任何位置,都有节点对其进行监测。节点感知半径和通信半径分别为和,二者皆为恒定常量。
2.1 目标模型
将网络对象时刻状态标记为,该时刻的状态向量用=[,,,]标记,对象的速度分量标记为和形式,不同方向的位置分量标记成和,得到的目标状态方程如下式所示
+1=()+
(1)
式中,获取的目标状态方程为+1,目标在转移时的状态矩阵为(),转移时产生的噪声矩阵为,过程中产生的噪声为。
在对目标进行跟踪时需要足够的时间,所以要设定监测区域为边长的矩形区域,依据目标在转移时的状态矩阵对该区域进行限制,限制过程如下式所示
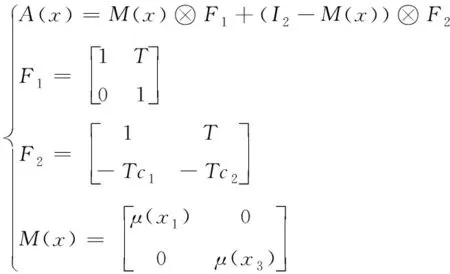
(2)
式中,目标在限制区域的动态特性分别为和,二阶矩阵为,控制参数分别为大于0的和,矩阵之间的积为⊗,二维矩阵为(),第1和第3项元素的参数为(,),步长为,()为矩阵函数。()的表现形式如下式所示

(3)
式中,目标在运动区域的边界阈值为,高斯噪声为,参数为,最大阈值为。基于上述过程构建传感器网络的目标模型。
2.2 摄像机位置与变形度关系感知
传感网络在运行时,网络节点需要通过传感器对监测区域的各个时刻进行对象信息的感知,基于恒定的频率完成所需的样本采集;最后根据采集的平均值实现网络目标对象的测量。

(4)
式中,在,两个方向的位置分量分别为和,获取的距离为,。
基于上述结果,对采集的样本信号进行处理,从而获取传感网络中对象信号的方差及均值,过程如下式所示

(5)
式中,信号方差为(),采集的样本总数量为,网络的非线性参数量,均值为()。
由此,整合上述计算结果,构建网络节点的感知模型,具体模型如下式所示

(6)
式中,方差为(),均值为0的高斯噪声为(),节点标志位用,标记,感知模型为,。
基于构建的感知模型,利用机器视觉技术对传感网络中的摄像机安装位置进行具体分析。

设定,垂直距离为×,水平距离为×,通过相应计算可获取,,计算结果如下式所示
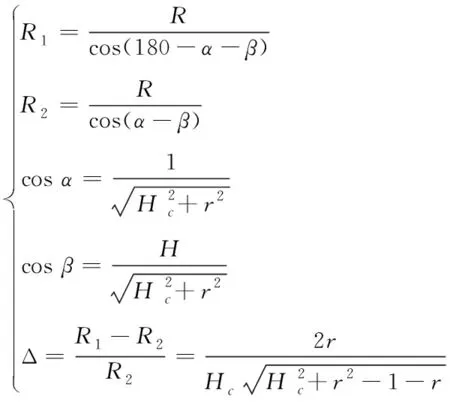
(7)
式中,目标的平均直径为,镜头到目标的距离与目标半径的比为,摄像机与目标之间的夹角分别为,,监测位置的极限半径为,可接受的最大变形程度为Δ。
通常情况下,在机器视觉系统中,监测位置的极限半径都不会偏大,根据机器视觉原理,对进行计算,过程如下式所示

(8)
依据上述的计算结果,获取监测时摄像机位置与变形度之间的关系。
3 目标跟踪
基于上述的无线传感网络分析结果,利用蜂拥控制法对传感网络的目标进行跟踪。
3.1 一致性滤波
基于卡尔曼滤波算法,分布式估计传感网络。设定传感网络中,节点的分布估计算法如下式所示
(9)

设定节点的估计误差为=-,依据滤波函数对其进行计算,从而整合无线传感网络中所有传感器的估计值。
3.2 跟踪规则
基于上述整合的估计值,利用蜂拥算法构建网络的目标追踪器。过程如下式所示:


(10)

基于物联网概念的警用仓库物联网报警信息监控平台系统是集三维信息呈现,多方位信息感知,报警联动等技术于一体的全方位信息呈现系统。通过数据对接,物联网技术等手段,对仓库内物资环境信息进行实时显示,并对异常问题进行定位提示,实现从对仓库从物资信息到安防监控全方位的信息呈现。
假定无线传感网络的有一部分节点无法探测目标状态,将其归类为类节点,可探测到目标对象状态的归类为类节点,类节点由于未能检测到目标对象状态,所以要基于网络中的接收邻居节点数据对其进行适当的控制。

当类节点与类节点相邻时,若类节点接收到来自类节点的数据信息时,只需接收该节点的位置信息即可。若二者相反,则接收传送者的速度与位置信息。由此,将两类节点的蜂拥控制器做划分处理,划分结果如下式所示
(11)
式中,划分后类节点的控制器为1,类节点的控制器为2。
基于上述流程,对目标的跟踪规则进行获取,具体规则如下:
1)任意时间≥0时,网络中的拓扑结构需保持通畅。
2)避免网络节点之间出现碰撞。
3)网络中的节点的移动速度要与目标对象的移动速度一致。

3.3 实现跟踪

2)当节点为类节点时,节点在时刻的测量状态为,并对其进行去噪处理,去噪结果如下式所示

(12)
3)以当前节点为原始节点,像周边相邻节点进行数据发送处理。
4)规整获取的测量数据以及节点状态的协方差。
5)更新网路过滤器,构建控制器,并完成划分处理。
6)对下一时刻的节点控制器进行计算,通过计算结果实现目标跟踪。
4 实验
为了验证上述目标跟踪方法的整体有效性,需要测试方法。分别采用基于机器视觉的传感网络目标跟踪方法(方法1)、时间偏差校准分布式多传感器多目标跟踪算法(方法2)、IPNet:帧间预测校验的多域卷积神经网络目标跟踪算法(方法3)实现对比测试;
1)模拟构建一个无线传感网络,并进行目标的追踪任务,对方法1、方法2以及方法3在追踪过程中产生的网络总能耗进行测试,测试结果如图1所示。
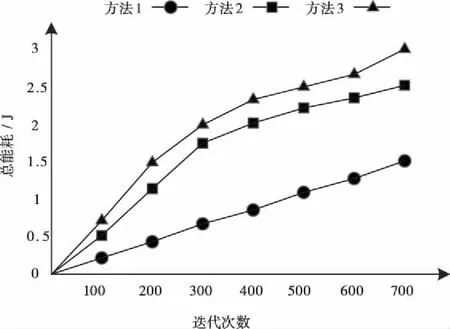
图1 不同目标跟踪方法的网络总能耗测试结果
分析图1可知,随着迭代次数的增加,网络的总能耗呈不同程度的上升趋势。方法2在进行目标跟踪时,消耗的总能耗较方法3来看,低于方法3,但是对比方法1来看,追踪过程中消耗的能耗要高于方法1。方法3在目标追踪过程中,消耗的总能耗是三种追踪方法中最高的。方法1在目标追踪时消耗的能耗要低于其它两种方法,这主要是因为方法1利用了机器视觉技术对传感网络中的摄像机安装位置进行具体分析,因此方法1在进行目标追踪时的网络的能耗消耗低。
2)将方法1、方法2以及方法3在进行目标跟踪时产生的跟踪路径与实际目标运动轨迹进行对比,对比结果如图2所示。
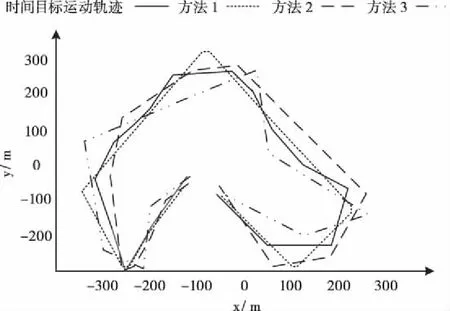
图2 不同方法与实际目标运动轨迹对比结果
分析图2可知,方法2与方法3的跟踪轨迹与目标实际运动轨迹之间相差较大。其中,方法2的跟踪轨迹与目标实际运动轨迹之间存在的误差大于方法1,但是对比方法3来看,误差小于方法3。方法1跟踪目标是产生的跟踪轨迹与实际目标运动轨迹相接近。综上所述,方法1在进行目标跟踪时与目标实际运动轨迹之间存在的误差小。
3)在对网络目标进行跟踪时,网络节点之间需保持一定距离,若节点之间距离为0时,则说明节点之间发生碰撞。针对不同的跟踪环境,采用方法1、方法2以及方法3,对目标跟踪过程中的网络节点距离进行测试。测试结果如图3所示。
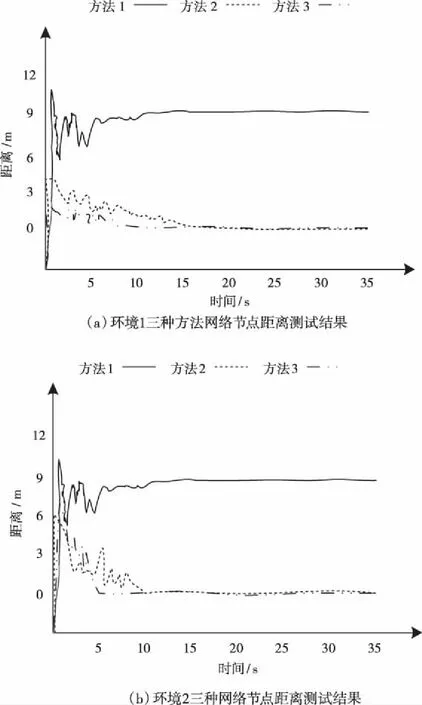
图3 不同方法的网络节点距离测试结果
分析图3可知,方法2和方法3在完成目标跟踪的过程中均发生了节点碰撞情况。对比环境1与环境2来看,环境1发生的碰撞时间要晚于方法2。方法1检测出的网络节点距离在测试前期出现波动,但是最终将节点之间的距离稳定在了9米。综合来看,方法1在对网络节点目标进行跟踪时,网络节点之间不会发生碰撞情况。
5 结束语
针对传统网络目标跟踪方法存在的问题,提出新的基于机器视觉的传感网络目标跟踪方法。该方法首先构建网络模型,分析无线传感网络。利用蜂拥控制法获取跟踪的规则,最后基于跟踪规则,实现对网络目标的精确跟踪。