基于驾驶模拟器洗出算法的非线性放缩法研究
2022-10-25游达章张业鹏陈林波
游达章,张 扬,张业鹏,陈林波
(湖北工业大学机械工程学院,湖北武汉430068)
1 引言
驾驶模拟器是评估驾驶员行为和车辆测试的有效研究工具。驾驶员培训可以显著提高道路交通安全并减少因交通事故造成的死亡人数。研究表明,利用驾驶模拟器进行虚拟驾驶和车辆测试可以显著的降低成本、节省能源并且更加安全。模拟驾驶系统中,洗出算法首先对车辆的位姿信号进行放缩处理,将其运动幅值限制在模拟器运动空间内,然后将位姿信号转化为模拟器的运动信号,并保留人体对运动感知的关键信息,达到较高的运动逼真度,实现模拟驾驶。其中,不恰当的放缩处理,会导致虚假暗示、驾驶员眩晕等模拟失真问题。因此,找到合适的放缩方法对于提高模拟器运动逼真度至关重要。
经典洗出算法由于其响应速度快、结构简单、易于调整等优点,已广泛应用于各个领域,然而其线性放缩法参数设置过于保守,导致模拟器空间利用率低,较小的输入信号无法被驾驶员感知等问题。文献[4]提出局部放缩法,对输入信号较高的部分进行线性放缩,解决了较小的输入信号无法被感知的问题,但未解决如何确定放缩比例的问题;文献[5]将Hermit缩比函数法应用于洗出算法,其信号单调性的保持不依赖缩比度的取值,避免了信号放缩过程中出现较大的畸变,但其触发段增长较慢,会造成一定程度的感知延迟;文献[6]提出的非线性缩放法在实际应用中效果良好,但其放缩参数固定,参数的选取依赖专家经验,其结果往往并不是最优的,导致模拟器空间利用率低,模拟逼真度不高。
针对非线性放缩法的缺陷,本文提出基于粒子群算法(particle swarm optimization,PSO)的非线性放缩法,通过引入人体前庭系统模型,将人体感知误差、信号放缩前后的相关性以及模拟器物理运动限制等因素作为选取放缩参数的依据,达到提高模拟器空间利用率以及模拟驾驶逼真度的目的,并结合经典洗出算法,进行了仿真验证。
2 经典洗出算法
2.1 洗出算法(以纵向模式为例)
洗出算法将运动分为四种模式:纵向模式 (包括纵向和俯仰两个自由度),侧向模式(包括横向和滚转两个自由度),偏航模式以及垂直模式。前两种模式能够使驾驶模拟器倾斜一定的俯仰角和滚转角,利用重力加速度在模拟器体坐标系中的分量为驾驶员提供持续的加速度感觉。

图1 经典洗出算法
经典洗出算法结构如图1所示,包括平动通道、倾斜协调通道和旋转通道。加速度信号通过比例放缩环节进入平动通道与倾斜协调通道,高通滤波器与低通滤波器配合使用分离信号。高通滤波器的作用:提取高频加速度信号,模拟车辆的突变运动,并使模拟器缓慢回到中心位置(洗出运动),为下一次运动做准备;低通滤波器的作用:提取低频加速度信号,由于模拟器运动空间有限,这部分信号需要经过倾斜协调处理,利用重力加速度在该方向的分量来模拟持续加速度的过程,低频信号可能造成模拟器超出物理限制而损坏,需加入限幅环节进行保护;角速度信号通过比例放缩环节进入旋转通道,通过高通滤波器后作为模拟的角速度输入。各个滤波器的参数由专家根据驾驶员的驾驶经验反复调试确定。图中,,为转换矩阵。
平动通道高通滤波器传递函数

(1)
其中,为拉普拉斯算子,和为截止频率和阻尼比,为一阶环节系数。
倾斜协调通道低通滤波器传递函数

(2)
其中,为拉普拉斯算子,和为截止频率和阻尼比。
旋转通道高通滤波器传递函数
(3)
其中,为拉普拉斯算子,和为截止频率和阻尼比。
2.2 人体前庭系统模型
前庭系统位于内耳,它由耳石器官和半规管器官组成,是哺乳动物感知线性运动和旋转运动的主要感觉器官。
半规管可以检测身体或头部的旋转,它们有三个半圆形的管道,允许人类感知偏航、滚转和俯仰运动。
半规管模型的传递函数如式(4)所示

(4)

耳石器官可以感知线性加速度,人体对线性加速度的感知是以比力的形式呈现的,耳石所感知到的比力如式(5)所示
=-
(5)
其中,为人体感官所受比力;为人体的绝对线加速度;为重力加速度。
耳石模型的传递函数如式(6)所示

(6)

2.3 非线性放缩法
Telban和Cardullo等人在洗出算法中提出非线性放缩法,其原理是:当模拟器的输入幅值较小时,增益应较高,否则输出可能低于驾驶员的感知阈值,模拟器驾驶员无法感知到运动;当输入幅值较高时,增益应较低,否则输出可能会使模拟器运动超出其物理运动空间的限制。
在这种情形下,假设输入为输出为,和为期望的最大输入和输出,和为=0和=时的斜率,那么非线性放缩被描述为如下形式
(7)
一个三次多项式来描述与之间的关系
=+++
(8)
此时,可得三次多项式的系数

(9)
在确定非线性放缩的系数时,专家们经验性的确定了、、与,值得一提的是,确定系数时,反复的调整和错误的调试需要付出很大的努力,而得出的结果往往并不是最优的,因此结合模拟器运动的物理限制和驾驶员的感知模型来确立非线性放缩系数,可以提高输入信号的保真度,使模拟驾驶效果更逼真。
3 基于PSO的非线性放缩法
粒子群算法是一种有效的基于群体的随机优化方法。它的灵感来源于生物种群的协作行为,例如一群鱼和一群鸟它们能适应周围环境,并通过成员之间的沟通和应用“信息共享”的方法来躲避危险,找到最好的食物来源。粒子群算法在求解时,每个问题的解会被看成一个个粒子,每个粒子都记得自己目前的最佳值和其领域的最佳值,使用最有效的信息来帮助自身寻求最优解。
本文使用粒子群算法,寻求最优的三次多项式系数,以纵向模式的放缩系数为例,迭代时其粒子表现形式为

(10)

位置更新方程为
(+1)=()+(+1)
(11)
粒子速度更新方程为
()=(-1)+(()-
(-1))+(()-(-1))
(12)
其中,为加权系数,r,为两个单独生成的均匀分布在[0,1]内的随机数,(t)为该单个粒子的最佳位置,()为全局粒子中的最佳位置。
为了评价粒子的优劣,本文确定了如下适应度函数

(13)

减小参考信号和经过放缩的信号之间的感觉误差是优化放缩法目的之一,感知比力误差与感知角速度误差表达式如下

(14)


(15)
其中,,、,为权重系数,这些权重系数都是根据文献[6,11,12]而确定的。



(16)





(17)
其中,()、()、()、()、()为模拟器线位移、线速度、线加速度、角位移、角速度;,、,,、,、,、,为权重系数。
以最小化适应度函数值为寻优目标,在寻优过程中,循环执行SIMULINKS洗出算法模型,通过粒子群算法优化后的非线性放缩法,可以在人体感知误差、模拟器物理运动限制和信号保真度之间实现优化平衡,为驾驶员提供更真实的驾驶体验。
4 仿真验证及结果分析
为了验证基于PSO的非线性放缩法的优化效果,从Carsim软件中提取一段车辆纵向加速度曲线作为模拟器的输入,如图2所示。

图2 输入加速度
在粒子群算法优化中,粒子种群大小为20,迭代次数选取为60次,图3显示了迭代次数与每次迭代PSO搜寻的最小适应度函数值,可以看到适应度函数值随着迭代次数而降低,在迭代30次之后达到收敛状态。
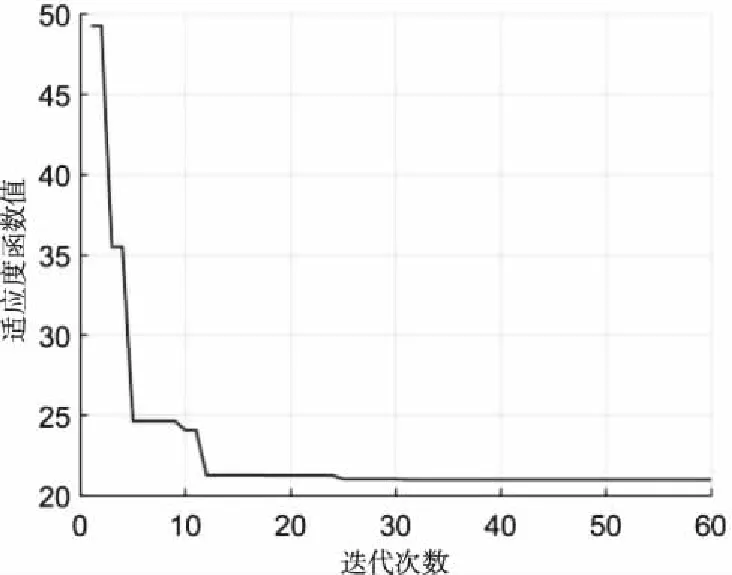
图3 PSO优化运行结果
图4为PSO优化的放缩法、现有放缩法与参考加速度的感知比力曲线,现有放缩法与参考曲线的皮尔逊相关系数为0.96而基于PSO优化的提高到了0.98,说明基于PSO优化的放缩法其信号保真度更高。现有的放缩法参数设置,本文与文献[6]保持一致。

图4 人体感知加速度
图5为基于PSO优化的放缩法与现有放缩法人体感知加速度误差绝对值,基于PSO优化的放缩法其感知加速度误差更小,在各误差峰值处更为明显,其感知加速度误差方差为0.76而现有放缩法则为0.91,说明基于PSO优化的放缩法可以减小感知比力误差,提高模拟逼真度。

图5 人体感知加速度误差绝对值

图6 纵向洗出位移
图6为纵向洗出位移曲线,可以看出,基于PSO优化的放缩法其洗出位移在各峰值处大于现有放缩法,最大洗出位移为-0.147米,而现有的放缩法为-0.094米;图7为倾斜协调洗出位移曲线,基于PSO优化的放缩法其最大角位移为4.21°,而现有的放缩法为-3.25°;说明现有的放缩法参数设置较为保守,PSO优化的放缩法提高了模拟器空间利用率。
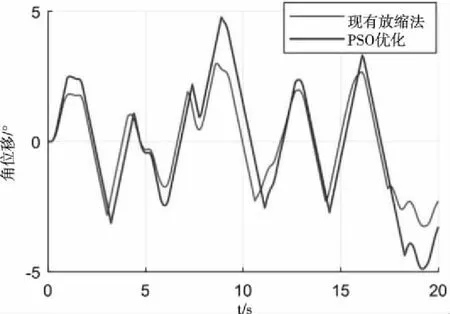
图7 倾斜协调洗出角位移
5 结语
洗出算法是驾驶模拟器的主要组成部分之一,在模拟器有限的运动空间内,洗出算法将车辆的运动转化为模拟器的运动。在洗出算法的设计中,缩放环节对于模拟器运动保持在其物理运动限制内至关重要。为了克服现有的非线性放缩法仅凭经验确定放缩参数、模拟器工作空间利用率低、模拟逼真度不高的问题,结合经典洗出算法,综合考虑信号的相关系数、模拟器的物理运动限制以及人体感知模型,提出基于PSO的非线性放缩法,并进行了仿真验证。
仿真结果表明,所提出的基于PSO的非线性放缩法在不违反模拟器物理运动约束的前提下,可以减小人体感知误差、提高模拟器的空间利用率、提高模拟驾驶的逼真度,为确定放缩系数找到了一种有效的方法。