基于V2X和UAV的车辆协同定位方法研究
2022-10-25张月霞
刘 冲,张月霞,2,3*
(1. 北京信息科技大学信息与通信工程学院,北京 100101; 2. 北京信息科技大学现代测控技术教育部重点实验室,北京 100101; 3. 北京信息科技大学高动态导航北京市实验室,北京 100101)
1 引言
车联网是未来智能交通系统发展的必然趋。在过去的十年里,许多智能交通应用得到了飞速的发展,如辅助驾驶、自动驾驶、车辆防碰撞、高速公路监测等。然而,这些应用需要实时且精确的车辆定位技术支撑。以GPS为代表的NGSS在高楼密集的街区、山区、恶劣天气等场景中由于信号受障碍物阻挡,导致其定位性能大打折扣甚至无法完成定位,难以满足为未来车联网应用对安全性和实时性的要求。
近年来,随着车联网定位技术的不断发展,基于V2X的定位技术越来受到人们的关注。文献[5]将基于机器学习方法和V2X通信进行了融合,在待定位区域的不同位置分别采集不同RSU的接收信号强度构建指纹库,定位阶段将待定位车辆的接收信号强度与指纹库中指纹进行对比,筛选指纹库中相似度最高的指纹点对应坐标作为待定位车辆位置。文献[6]提出了一种利用到达角度(AOA)和V2X通信的车辆定位方法,该方法假定待定位车辆配备全向天线,待定位车辆利用全向天线解算出通信范围内接收到RSU或辅助车辆信号的来波角度,并利用来波角度的正切值构建包含待定位车辆坐标的位置约束方程组。文献[7]提出一种基于加权质心算法的V2X车辆定位方法,针对传统质心定位方法精度较低问题,待定位车通过对附近RSU和辅助车辆的坐标进行加权来估算自身的位置坐标,其中权值的设置主要包括相对距离及接收信噪比两部分。
在上述基于V2X的改进定位方法中全部假设待定位车辆可以接收到足够的RSU及辅助车辆广播信息。然而在实际车联网环境中,由于成本、能耗、实际车流量、辅助车辆比例等诸多因素的影响导致大多数网络中RSU及辅助车辆的分布相对稀疏,无法为待定位车辆提供持续且精准的位置服务。以二维定位场景为例,基于测距的定位方法要求待定位车辆同时位于三个辅助节点的广播范围内才可完成定位,而基于非测距的定位方法也需要同时位于多个辅助节点通信范围内才能获得精准的位置估计,这通常难以保证。
UAV技术是现阶段热点研究方向之一,已广泛应用于遥感测绘、影视航拍、搜索打击等领域。近年来,随着位置服务需求的日益增加,也有许多专家对无人机定位技术进行了研究。文献[9]针对列车在山谷等复杂地理环境下信号受阻问题,利用无人机辅助定位,针对列车和无人机的速度差产生的定位误差,对传统RSSI测距定位算法进行误差补偿,提升定位精度。文献[10]利用极端学习机训练单隐层前向反馈的神经网络,未知节点记录接收信号强度,利用神经网络估计坐标。文献[11]提出了一种基于图像处理的危险信息监测及定方法,并采用简单的硬件和新颖的图像处理算法对待定位目标进行识别与定位。
通过在GNSS信号较弱的区域部署无人机可以很好地解决待定位车辆无法收到足够的V2X信号而导致定位连通及定位精度性较差问题。因此,本文提出了一种基于V2X和UAV的车辆协同定位方法。待定位车辆利用无人机与自身的相对运动模型构建TOA方程,并通过与已知坐标车辆或RSU进行距离差分,修正TOA测距的时间误差,实现协同位置解算,同时利用基于卡尔曼滤波的联邦滤波器对V2X及UAV定位方法进行融合,进一步为待定位车辆提供连续、准确的位置服务。
2 V2X定位模型
在本文V2X定位模型中,若干RSU规则部署于道路两侧,其坐标通过更精确的测量方式预先测定得出。网络中的车辆包含已知坐标车辆和未知坐标车辆。在已知坐标车辆中,由高精度传感器(SRV、激光雷达、摄像头等)获取自身坐标的车辆由于具有较高的精度与 RSU共同构成网络中的辅助节点,其通信半径分别为r和R,通信技术为车联网短程通信技术(DSRC)。辅助节点以周期T在其通信范围内进行位置广播,其中包含自身标识和位置信息。未知坐标车辆为网络中的未知节点,未知节点中提出位置请求的节点为待定位节点,待定位节点在发起位置请求后,需接收辅助节点的位置广播信息,利用双向测距法(TWR)进行测距,并通过测距及坐标信息联立方程,从中解算出自身位置坐标,V2X定位示意图如图1所示。
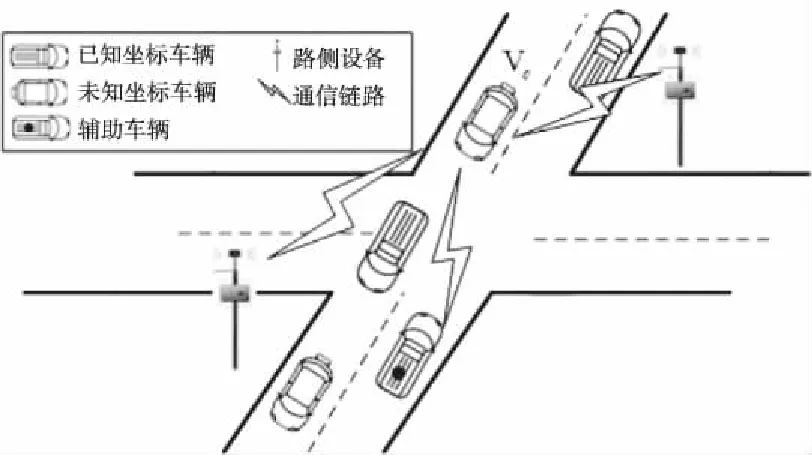
图1 V2X定位示意图
设车辆V为待定位车辆,忽略高度上的变化,理想情况下V的位置坐标可通过求解方程组(1)获得
(1)
式中(,)为待定位车辆的位置坐标; (,)为第个辅助节点的位置坐标,为到第个辅助节点的相对距离。在二维场景下当≥3时,可通过最小二乘法、级数法、最大似然估计法等对(,)的值进行求解。
面向未来的车联网应用需要精准且连续的位置服务。然而在实际车联网环境中,基于V2X定位方法精度有待提高且稀疏的辅助节点分布很难保证待定位车辆总能接收到足够的辅助节点信息,导致待定位车辆在GNSS信号较差的地区定位连通性较低,无法获得高可靠性的位置服务。因此,问了解决上述问题并提升定位精度,本文提出基于V2X和UAV的车辆协同定位的方法。
3 UAV-V2X车辆协同定位方法
3.1 车辆协同定位模型
基于UAV-V2X的车辆协同定位模型如图2所示。
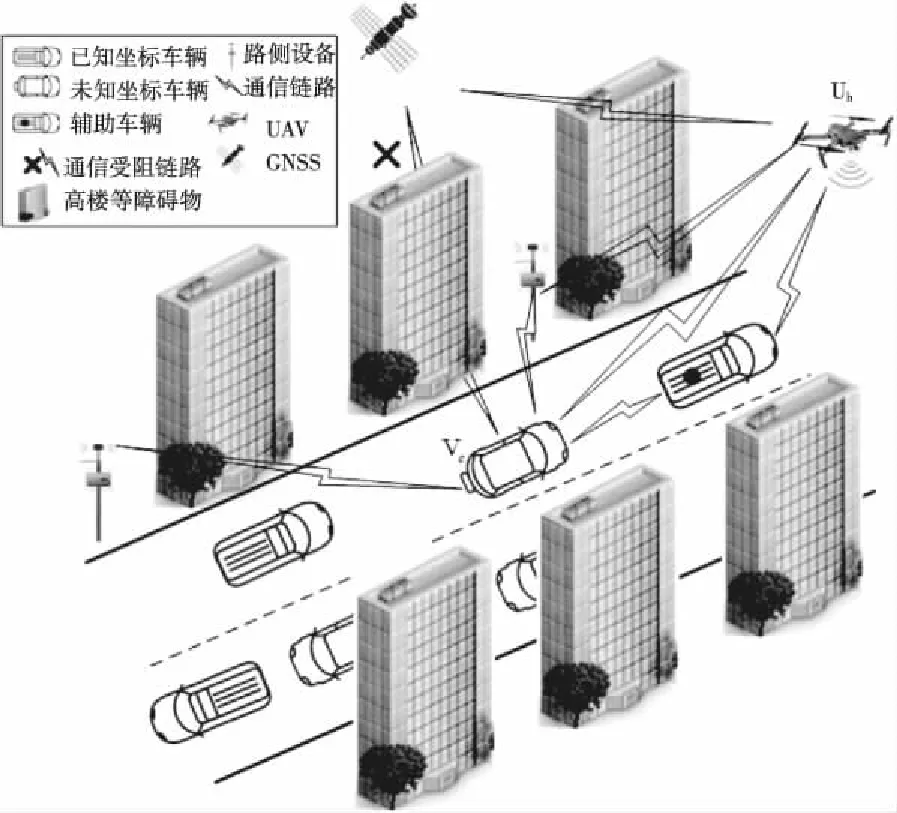
图2 UAV-V2X车辆协同定位模型
设车辆定位区域由于高楼等障碍物的遮挡导致GNSS信号较弱,无法提供准确的位置服务。UAV-V2X车辆协同定位模型中车辆类型、RSU部署、V2X定位原理与V2X定位模型相同。无人机U部署于GNSS信号较弱地段上空,其可通过高精度传感设备或RTK等定位手段获得自身精确坐标,并以周期T对自身当前时刻及当前时刻位置信息进行广播。车辆V为待定位车辆,本文要解决的主要问题是在GNSS定位盲区下,如何通过UAV和V2X协同定位方法为V提供高连通性、高精度的位置服务。
3.2 基于单UAV的协同距离差分定位
基于单UAV的协同距离差分定位核心思想是待定位车辆利用无人机与待定位车辆的相对运动模型构建TOA测距方程,并通过与辅助节点进行距离差分,修正TOA测距的时间误差,实现协同位置解算,定位模型如图3所示。

图3 基于单UAV的距离差分定位模型


(2)


(3)


(4)
其中△和△分别为和的时钟误差。
同理,与辅助节点在时刻的测量距离与真实距离间关系如下

(5)
其中

(6)

(7)
将式(5)表示为式(8)所示形式

(8)


(9)
设(△-△)=△,则式(9)可表示为

(10)
将式(10)带入式(2)可得


(11)


(12)
其中=--1。
进一步将式(12)表示为如下形式

(13)
将式(13)带入式(11),整理得


(14)
令

(15)

(16)

(17)
将式(15)、(16)、(17)带入(14)整理得:


(18)
将式(18)整理为式(19)所示形式,并将多组测距数值融合
=
(19)
其中:

(20)

(21)
(22)
其中

(23)
利用最小二乘法对式(19)中的进行求解,即对式(24)进行最小化处理
()=(-)(-)
(24)
可求得值如式(25)所示
=()
(25)
3.3 UAV-V2X融合定位
使用卡尔曼滤波对V2X和UAV的定位结果进行融合。根据滤波器合结构,可将滤波器分为集中卡滤波器和联邦滤波器两类,但集中滤波器由于计算量较大,难以保证系统的实时性。故本文采用联邦滤波器实现UAV和V2X的融合定位。基于UAV-V2X的联邦滤波结构图如图4所示:
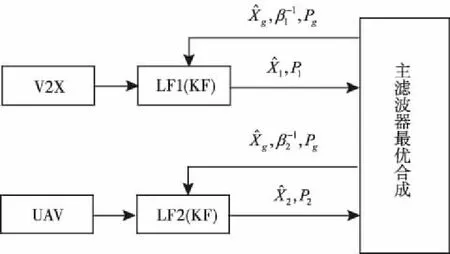
图4 基于VAV-V2X的联邦滤波结构图
V2X、UAV采用线性卡尔曼滤波器作为局部滤波器,分别记为LF1、LF2,其对应的信息分配系数分别为、,主滤波器对局部滤波器进行融合与反馈。
采用当前统计模型描述车辆运动状态的变 化过程,取组合定位整体变量如式(26)所示
=[,,,,,]
(26)
其中、分别是车辆东向和北向的位置分量,、分别是车辆东向和北向的速度分量,、分别是车辆东向和北向的加速度分量。系统的离散状态方程可表示为
=,-1-1+()+()
(27)
其中为时刻状态向量,,-1为-1到时刻的状态转移矩阵,()为控制向量,()为噪声向量。
对于2定位子系统取系统状态变量=,系统状态方程与总系统状态方程相同。其观测量为子系统定位输出的东向和北向位置坐标分量,观测方程为
()=()()+()
(28)
在上式中

(29)
对于UAV子系统与V2X子系统类似,系统变量X=X。取观测量为子系统定位输出的东向和北向位置坐标分量,观测方程为
()=()()+()
(30)
在上式中

(31)
对于LF1、LF2子系统采用卡尔曼滤波递推方程进行时间与量测的更新

(32)
主滤波器对子滤波器进行最优合成,其合成方法如下
(33)

主滤波器完成信息融合后,对子滤波器进行信息反馈

(34)
其中:+=1。
4 仿真分析
为验证所提方法的性能,在东西双向四车道模型中进行仿真分析,设每条车道宽度W=3.5m,RSU交替分布于道路两侧0.5m处,相邻RSU水平距离L,设RSU通信半径为R=300m,车量以36km/h的速度沿车道方向行驶,加速度噪声==03,最大加速度为10,==01。车辆通信半径=30,辅助车辆数占总车辆数10,单条车道中车辆密度为(辆/m),无人机飞行高度H=200m,且无人机辐射范围覆盖待定位区域,网络中的广播周期=02,=05,==05。
定位连通性直接决定待定位车辆的定位性能的优劣,在V2X定位中当待定位车辆同时位于三个辅助节点广播范围内时方可完成定位,通过改变RSU间水平距离L及车辆密度ρ,比较本文所提V2X/UAV定位方法与V2X定位方法的定位连通性,具体如图5所示。
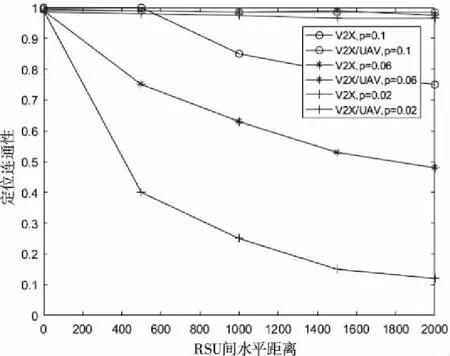
图5 各定位方法定位联通性化折线图
由图5可知,V2X定位方法定位连通性随着L的增加和ρ的减小而大幅度下降,即在辅助节点密度较低的情况下无法无法提供连续的定位服务。而基于V2X/UAV的定位方法定位连通性随着L的增加和ρ的减小变化不大,始终接近于1。其本质原因在UAV定位不受L、ρ的影响,对V2X定位连通性较差区域进行了补充定位。但系统启动时基于UAV的定位方法需要一定时间构建UAV与待定位车辆间的相对运动方程,若在该段时间待定位车辆周围的辅助节点较少无法完成V2X定位,则会对V2X/UAV定位方法的定位连通性造成一定影响。
为进一步验证所提方法的性能,对V2X/UAV定位方法、V2X定位方法、UAV位方法在的定位精度进行仿真比较,单次测量中误差的衡量标准采用均方根误差衡量。测距误差为均值为0的高斯白噪声,其方差随通信距离的增加在1m至4m内线性增长,假设通信链路为视距链路,图6为三种定位方法定位误差比较图。

图6 各定位方法误差比较
由图6可知,UAV、V2X、UAV/V2X定位方法平均定位误差分别为3.6m、2.8m和2.5m。
与V2X、 UAV定位方法相比V2X/UAV定位方法的平均定位精度分别提升了30.5%和10.7%,其主要原因在于本文所提方法通过卡尔曼滤波的思想为V2X及UAV定位的观测值及预测值分配了合理的权值,并利用联邦滤波器对V2X及UAV定位方法进行融合,从而得到较优的定位精度。
另一方面,车联网实际环境较为复杂,过往车辆等障碍物易遮挡V2X通信链路而产生多径效应,大幅度影响定位精度,而UAV部署于待定位车辆上空,其通信链路通常为视距链路,基于V2X/UAV的定位方法对V2X定位方法和UAV定位方法的优势进行了融合,从而提供高精度、高稳定性的位置服务。本文所提定位方法适用于GNSS盲区下V2X定位方法定位连通性较差的应用场景,且应用该方法需要在待定位区域上空部署已知位置信息且具有无线电发射功能的UAV。
5 总结
本文提出一种融合V2X/UAV的车辆协同定位方法,其主要目的是解决城市峡谷等GNSS盲区中V2X定位连通性及定位精度较低问题。在本文所提方法中UAV通过自身与待定位车辆间的相对运动模型联立多组TOA方程,并结合辅助节点的误差广播提升UAV定位精度,为V2X定位提供盲区中的补充定位。同时利用卡尔曼滤波对V2X及UAV定位方法进行融合,进一步为待定位车辆提供连续、准确的位置服务。仿真结果表明,本文所提定位方法可提供高精度、高稳定性的车辆定位服务,解决了车联网实际环境中V2X定位连通性较低的问题,提升了定位精度。但在实际定位场景中,复杂的车路环境、辅助节点坐标误差、恶劣天气等多方面因素都会对定位性能产生一定的影响。因此,在后续研究工作中还需进行更深入的研究,进一步方案可行性。