基于改进鲸鱼算法和神经网络的食品机器人能耗轨迹规划
2022-10-24黄崇富刘力超
黄崇富 常 宇 刘力超
(1. 重庆工程职业技术学院,重庆 402260;2. 中煤科工集团重庆研究院有限公司,重庆 400037;3. 四川大学锦城学院,四川 成都 611731)
随着工业机器人技术的快速发展,食品机器人逐渐被应用于食品原材料搬运、码垛、拣取等领域[1-2],对食品生产效率产生了深远的影响[3-4]。食品机器人轨迹规划的目的是通过合理支配末端执行器以及各个关节的位移、速度等参数,降低能耗、减少机械磨损、保证运动平稳和提高机器人性能[5]。
食品机器人运动轨迹规划可划分为末端执行器轨迹规划和关节空间轨迹规划2种类型[6],末端执行器轨迹规划需重复求解逆运动方程,计算量大;关节空间轨迹规划将关节变量表示为时间函数,只需少量逆运动学计算,更适用于食品机器人点到点运动轨迹规划问题[7]。普亚松等[8]提出了一种混合多项式插值的关节轨迹规划方法,得到的规划角速度波动更小,运行更平稳,但该算法需人为设定中间目标点角速度等参数;田国富等[9]采用内插法替代多项式插值,实现了对关节的连续运动轨迹规划,但存在角速度峰值较大的缺陷。在食品加工环境中,机器人动力学参数往往是未知的,这就需要进行机器人动力学辨识[10-11],然而,采用最小二乘法[12]、工具变量法[13]等传统动力学参数估计方法,得到的动力学参数模型形式单一,只适用于特定场景。赵俊宇等[14]提出了一种基于平行BP网络的动力学辨识模型,并采用LM算法对模型进行训练,仿真结果验证了该模型能够有效拟合关节力矩,但该算法在训练阶段耗时较多,且模型参数探索容易陷入局部最优。
研究拟对食品工业机器人动力学参数未知情况下的节能轨迹规划问题进行分析,提出一种基于鲸鱼算法和神经网络的点到点机器人关节能耗轨迹规划方案,设计基于神经网络的相似动力学辨识,采用改进的鲸鱼优化算法(Whale Optimization Algorithm,WOA)[15]对动力学辨识模型参数进行优化;在此基础上,利用四次多项式插值对关节轨迹进行规划,将轨迹参数等效为WOA编码,通过优化求解关节能耗目标函数,从而得到能耗最优的关节运动规划轨迹,旨在有效实现动力学参数未知下的轨迹规划,使轨迹能耗更低。
1 食品机器人节能轨迹规划问题描述
食品机器人点到点(PTP)的运动模式适用于食品原材料拣取、码垛、搬运等作业场景,此时只需规定末端执行器起点和终点的姿态、位置等信息即可。对于关节数为Nr的食品机器人,其基于拉格朗日形式的动力学模型[16]为:

(1)
式中:
τ(t)——机器人关节力矩;
q(t)——关节角位置,rad;

M(q)∈RNr×Nr——惯性矩阵(为对称矩阵);

G(q)∈RNr——重力矢量。
根据文献[16],第i个(i∈[1,…,Nr])关节的功率pi(t)与力矩τi(t)的关系式为:
pi(t)=Ui×Di×τi(t)/Ki,
(2)
式中:
Ui——第i个关节的电压值,V;
Di——第i个关节的传动比系数;
Ki——第i个关节的电机转矩常数。
由机器人关节功耗构建机器人轨迹规划能耗目标函数f(s):
(3)
式中:
s——给定关节路径;
Tf——关节移动结束时间,s。
(4)
式中:
V=[v1,…,vn]T——隐含层输出向量;
σi——第i个径向基函数的扩展常数。

(5)
(6)
(7)
将式(5)~式(7)代入式(1),得到关节近似动力学模型:
(8)
确定关节近似动力学模型后,采用改进的鲸鱼优化算法(IWOA)对3个RBF神经网络模型参数进行训练。
2 改进鲸鱼优化算法在食品机器人轨迹规划中的应用
2.1 改进鲸鱼优化算法的实现
鲸鱼优化算法(WOA)模拟座头鲸捕猎行为,进化过程划分为局部搜索和全局搜索两个阶段,局部搜索采用螺旋和收缩包围更新机制,全局搜索采用随机搜索更新策略,有效平衡了算法探索与开发,具有较高的收敛精度和较快的收敛速度[19]。WOA存在的缺陷:① 指定全局最优解为所有个体学习进化对象,容易陷入局部最优;② 采用概率分布的方式种群初始化,影响了算法收敛速度。因此,提出改进的鲸鱼优化算法(IWOA),即采用混沌映射法对种群进行初始化,引入领域内优秀个体信息自适应更新学习进化对象。
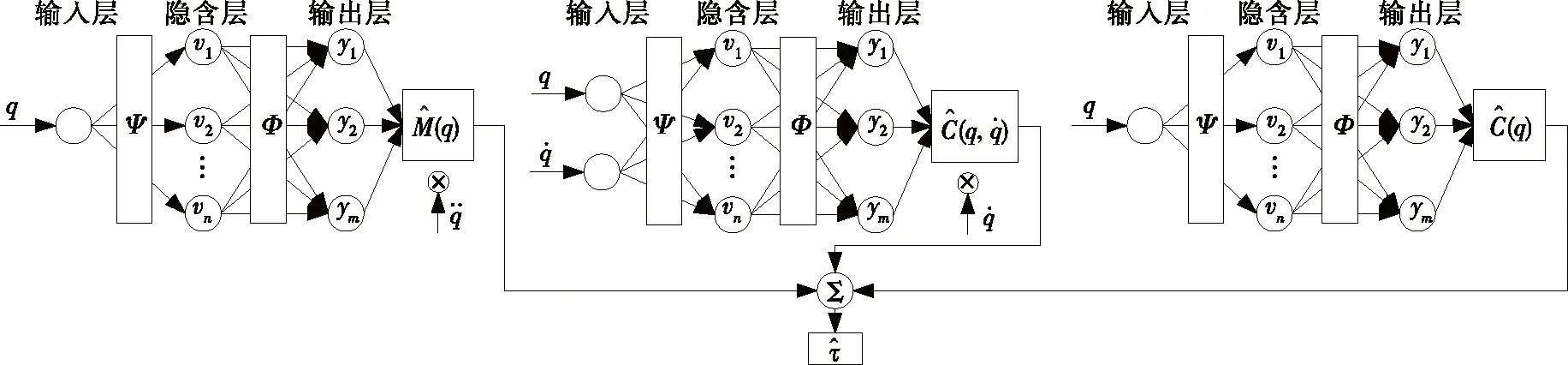
图1 RBF神经网络相似动力学辨识示意图
2.1.1 混沌映射 随机生成规模为Q的初始种群,采用Singer映射对种群内个体Xi(i∈[1,…,Q])进行混沌映射处理:
(9)
式中:
μ——混沌系数,当μ∈[0.9,1.08]时,Singer映射具有混沌行为。

(10)
λ=1-et-Tmax,
(11)
式中:
X*(t)——WOA设定的Xi学习进化对象;
Xg(t)——当前种群目标函数值最优个体;
λ——自适应控制系数;
Tmax——最大迭代系数。
由式(10)、式(11)可知,个体Xi自适应调整向临域内优秀个体和全局最优解学习程度,保证了种群多样性,有助于提升算法收敛精度。选取Sphere单峰函数和Griewank多峰函数验证IWOA收敛性能,并与基本WOA、布谷鸟算法(CA)[21]进行对比试验,各函数收敛曲线如图2所示。

图2 测试函数对比收敛曲线
Sphere函数用于验证算法的收敛精度,Griewank函数用于验证算法跳出局部极值的能力[22-23]。由图2可知,IWOA算法全局寻优能力明显优于CA和WOA算法,表明IWOA能够较好地平衡局部搜索与全局搜索,收敛精度更优。
2.2 IWOA优化RBF神经网络模型参数

Xi=[n,c1,…,cn,σ1,…,σm,ω11,…,ω1m,…,ωn1,…,ωnm]。
(12)
将机器人关节力矩实际输出值与网络评估值之间的误差平方和作为目标优化函数:
(13)
式中:
J——网络训练次数;

τi——第i次力矩实际输出值。
采用IWOA优化式(13)目标函数,当算法迭代次数达到最大迭代次数Tmax或者网络参数达到预期效果时,算法停止迭代进化,种群目标函数值最优个体对应最佳参数,代入RBF神经网络进行学习,以实现轨迹规划。
2.3 四次多项式关节运动轨迹规划
利用四次多项式对食品机器人关节空间轨迹规划过程进行描述,对于第i个关节(i∈[1,…,Nr])角度qi(t):
qi(t)=ait4+bit3+kit2+dit+ei,
(14)
式中:
ai、bi、ki、di、ei——轨迹参数。

(15)
(16)
di=0,
(17)
ei=qi(0),
(18)
将式(15)~式(18)代入式(14)得到关节轨迹描述:
(19)
(20)
(21)

(22)
(23)
(24)
2.4 食品机器人节能轨迹规划的实现

(25)
(26)
IWOA算法迭代次数达到最大值时,停止迭代进化,种群目标函数值最优个体对应最佳Kbest。根据式(15)~式(18),利用Kbest求解A、B并代入式(14),从而得到最优能耗轨迹规划结果,食品机器人节能轨迹规划实现示意图如图3所示。

图3 食品机器人节能轨迹规划实现示意图
3 仿真试验
搭建如图4所示的6关节食品机器人D-H坐标系(D-H参数见表1),仿真环境为MATLAB2018a。IWOA算法参数设置:鲸鱼规模Q=200,IWOA算法最大迭代次数Tmax=400,混沌系数μ=1.03,RBF网络训练次数J=20。

图4 机器人D-H坐标系
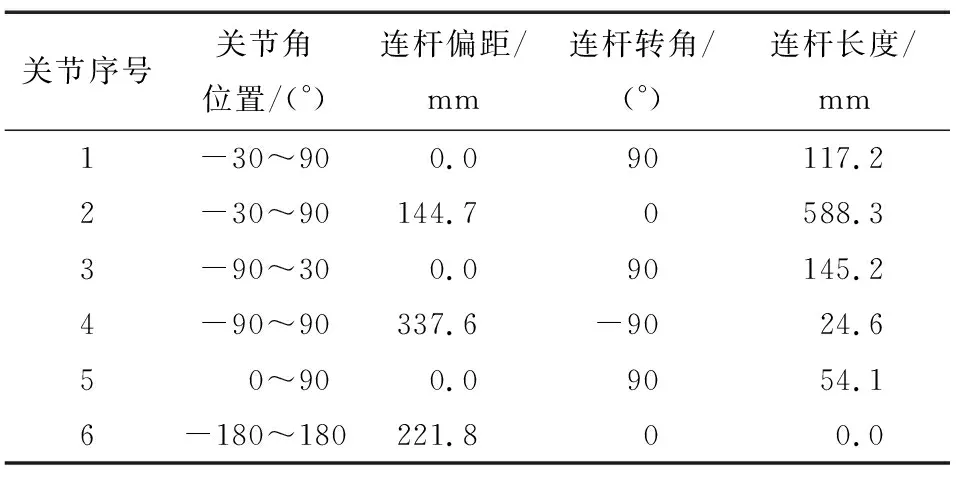
表1 D-H参数表
3.1 模型训练

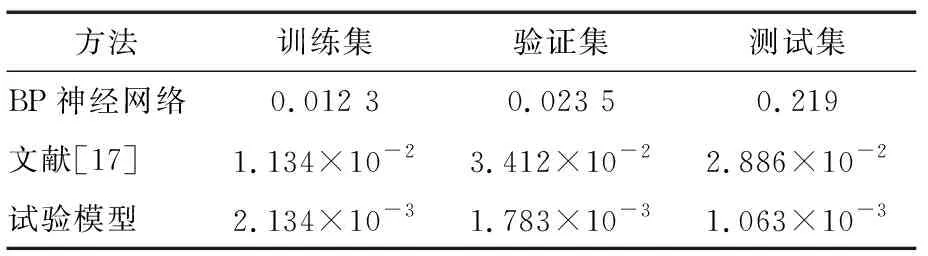
表2 模型训练评价指标对比结果
由表2可知,无论是训练集、验证集还是测试集,试验模型得到的相似动力学RMSE均优于其他两种模型,达到了10-3N·m级别水平,表明基于试验提出的IWOA优化RBF神经网络的相似动力学辨识具有更好的拟合和预测能力。
3.2 轨迹规划对比试验
根据表1设定的机器人关节边界条件,利用四次多项式对食品机器人关节空间轨迹进行描述,代入训练后的RBF神经网络,并采用IWOA对节能轨迹规划目标优化函数进行求解,从而得到最佳食品机器人关节轨迹规划结果。为进一步对比分析试验所提IWOA-RBF轨迹规划方法的性能,采取基于WOA的轨迹规划方法WOA-RBF和文献[6]提出的能耗轨迹规划方法进行对比试验,每种方法独立运行20次。以关节5为例,不同轨迹规划结果见图5,不同轨迹规划方法下关节角位置、角速度、角加速度等轨迹参数对比结果见图6,力矩变化曲线如图7所示,不同轨迹规划方法指标对比结果见表3。

图5 不同轨迹规划方法轨迹规划结果

图6 不同轨迹规划方法轨迹参数对比

图7 力矩变化曲线
由图5可知,相比于其他两种算法,IWOA-RBF得到的规划轨迹更平滑,拐点变化更平稳,表明其更适用于关节空间移动。由图6、图7可知,对于关节角度位置变化,IWOA-RBF得到的轨迹角位移满足约束条件,且变化更加平缓;对于角速度、角加速度和力矩,IWOA-RBF的峰值明显小于其他两种算法,且IWOA-RBF在力矩峰值时逗留的时间较短,即关节电机处于满负荷运行的时间短于其他两种算法,达到了节能的目的。由表3可知,对于同样的末端起点与终点轨迹规划问题,虽然IWOA-RBF求解时间不是最短的,但其得到的最优轨迹所消耗的移动时间最短,且轨迹能耗的平均值和最小值均明显小于其他两种算法,相比于文献[6]的能耗结果,平均能耗和最优能耗降低了约15.02%,9.01%,而WOA-RBF表现得最差。

表3 不同轨迹规划方法指标对比
4 结论
研究提出了一种采用改进径向基函数神经网络规划食品机器人关节轨迹的方法,解决了动力学参数未知情况下的节能轨迹规划问题,通过引入改进鲸鱼算法,提高了径向基函数神经网络模型辨识精度,有效降低了关节能耗,该方法能够应用于食品机器人工作场景。后续将重点研究在线节能轨迹规划问题,以实现对临时任务的节能轨迹规划。
