基于LE-ELM的锂电池热过程时空建模方法
2022-10-20黄镇泽梁志勇
吕 洲,何 波,黄镇泽,梁志勇
(1广州港科大技术有限公司,广东 广州 511458;2广东产品质量监督检测研究院,广东 广州 510670)
随着电池技术的发展,锂离子电池由于其高能量密度,在新能源汽车、无人机和储能元件制造等行业越来越受欢迎[1-2]。但由于锂电池对于温度变化的敏感性很强,在充放电过程中温度过高会对电池造成损害,甚至可能会导致锂电池燃烧、爆炸等严重后果,过低的温度也会直接导致锂电池的实际可用能源和功率密集性降低[3-4]。因此一个全面和精确的电池管理系统对于锂电池的效率、寿命和安全至关重要,而电池管理系统对电池的控制、热管理和故障诊断等都需要依赖于准确的电池热过程模型。但是由于锂电池热过程本质上属于一种非线性分布参数系统(distributed parameter system,DPS),电池内部的温度分布是时间/空间耦合的,并且具有无限维的特性,使得建模存在很大的困难。
徐蒙等[5]建立了三维电化学-热耦合模型,对放电倍率变化与电池产热之间的关系进行了研究。Li等[6]利用三维电化学-热耦合模型的机理,对磷酸铁锂电池进行建模并求解,得到了磷酸铁锂电池内部的温度分布。Lin等[7]采用等效电路模型计算电池的端电压和SOC,建立了一种由等效电路模型和双态热模型双向耦合的电池热模型来求解相关的温度参数。然而上述方法都是基于求解电池温度偏微分方程和已知边界条件的电池温度模型,由于其模型的复杂性以及高阶偏微分方程的存在,求解需要大量的计算成本。因此更多的学者开始采用数据驱动模型对锂电池温度变化进行建模。陈实等[8]采用人工神经网络的方法,建立了一个包含一层隐含层的三层神经网络,采用LM 算法对模型进行训练,对锂电池不同放电倍率放电时的表面温度进行了预测。宋明超等[9]提出了一种基于电化学阻抗谱的锂电池内部温度预测方法,根据不同SOC和SOH下交流阻抗相移曲线分布不同找到映射关系最好的频率区间,然后利用三次多项式对合适的频率下相移绝对值与内部温度的映射关系进行拟合。
同时部分学者开始将基于时空分离的建模方法应用于锂离子电池热过程。时空分离方法通常与空间基函数的学习相结合,Karhunen-Loève(KL)方法[10]是从DPS的时空数据中学习最具特征的空间基函数的一种代表性方法,又称为主成分分析(PCA)或本征正交分解(POD)。根据获得的基函数,DPS的低阶表达就可以用Galerkin 方法[11]计算或用基于数据的方法[12-13]进行辨识。Liu等[14]提出了一种基于KL 方法的二维锂离子电池热模型,模型可以精确地预测单体电池表面温度场的分布。Wang 等[15]提出了一种基于KL 的圆柱型锂电池温度分布的实时估计方法,该模型对对流换热的变化具有较好的适应性,可在不同的边界冷却条件下工作。虽然KL方法已广泛应用于锂离子电池热过程的建模,但因为KL 分解是一种全局线性模型降维方法,本质上是针对线性过程的最优化,这将影响它们在非线性DPS 建模中的准确性[16]。在机器学习和模式识别领域,已经提出了大量利用数据局部特性的非线性降维方法,例如局部线性嵌入(LLE)[17]、Hessian LLE[18]、拉普拉斯特征映射(LE)[19]等,其核心主张是通过提取数据的局部邻域特征,保留数据的全局特征。与全局KL 方法相比,通过结合时空数据的局部属性,局部降维方法可以比非线性数据更有效。
本工作提出了一种基于LE-ELM的锂离子电池热过程建模方法。首先,利用从原始系统采集的时空数据,使用基于LE 方法的局部非线性降维方法构建空间基函数,以表征系统固有的非线性拓扑特征;利用所得的基函数进行时空分离,获得原始数据的低阶时序表达;然后用ELM 以时间系数和对应的电流电压输入信号来近似低阶时序模型;最后集成辨识出的ELM 模型与空间基函数,通过时空综合重构出锂离子电池的全局时空模型。本工作所建立的有限维模型计算效率高,对空间复杂非线性特征的处理能力优于传统的基于KL 的时空模型,更适用于在线估计和控制相关的应用。
1 问题描述
锂离子电池内的热过程属于一个典型的非线性抛物型分布参数系统,其控制方程可以写成以下偏微分方程形式[20]



其中,h为锂电池表面的对流换热系数;Tair表示环境温度。由于分布参数系统具有时间/空间耦合的特性,式(1)无法直接用于锂电池的控制和在线预测的应用,原因可总结如下:
(1) 由于锂电池内部的热过程中存在很多复杂或未知的动态特性,使获得锂电池的精确解析模型非常困难。
(2) 分布参数系统由于时空耦合具有无限维的特性,模型的计算复杂度非常高。
(3) 锂电池的热过程具有很强的非线性特征,这种强非线性会同时体现在时间维度和空间维度上。
2 基于LE-ELM 的非线性时空建模策略
在分布参数系统的建模过程中,空间基函数的学习会很大程度地影响最终模型的精度,而降维方法则会直接决定学习到的空间基函数的形式,因此降维方法的选择对分布参数系统建模过程至关重要。传统的KL 方法属于全局线性降维方法,它的目标是通过某种线性投影将高维的数据映射到低维的空间中表示,KL 方法并不会试图去探索数据的内在结构因而在降维过程中只能保存数据的全局Euclidean 结构,因此在降维时可能无法保留时空数据内固有的非线性拓扑特征,在处理锂电池热过程这种具有强非线性特征的分布参数系统时,往往会产生较大的模型误差。
而拉普拉斯特征映射(LE)方法属于局部非线性降维技术。它能够通过构造数据的局部线性结构,使降维后的数据较好地保持原有的流形结构,因而获得表征系统空间非线性特征的空间基函数。因此,对于锂电池这种强非线性分布参数系统,基于LE的时空建模方法比传统的基于KL的时空建模方法具有更好的模型性能。因此本工作提出了一种基于拉普拉斯特征映射的非线性时空建模策略来解决上述问题。如图1所示,方法的主要框架总结如下:

图1 基于LE-ELM的时空建模策略Fig.1 Spatiotemporal modeling strategy based on LE-ELM
(1) 采用拉普拉斯特征映射(LE)方法构建非线性空间基函数来进行时空分离和模型降阶,从而表征原始系统的非线性空间结构特征。
(2) 将原始时空数据投影到空间基函数上,获得低维的时序数据。
(3) 根据获得的低维时序数据,利用极限学习机(ELM)建立一个神经网络模型来近似未知的时序动态特性。
(4) 利用获得的空间基函数与神经网络模型,对原系统的时空动态特性进行重构。
2.1 拉普拉斯特征映射方法
拉普拉斯特征映射(LE)是一种典型的流形学习方法,它通过图谱拉普拉斯的概念计算高维特征集从而得到低维流形的表示方法。LE 算法降维的实质就是寻找到一个平均意义上保持数据点局部邻域特征的映射。其主要思想是,如果两个数据实例很相近,那么这两个数据实例在降维后的目标子空间中也应该尽量接近。LE 算法所产生的映射可以看作是对几何流形的一种连续离散逼近的映射,用数据点的邻域图来近似表示流形,并用Laplace-Beltrami算子近似表示邻域图的权值矩阵,实现高维流形的最优嵌入。
假设现场采集或从实验中收集到的时空数据为{T(S,ti)|S∈Ω,S= 1…ns,i= 1…nt},其 中ns和nt分别表示空间方向和时间方向上的时空变量的个数。根据傅里叶变换,可以将数据T(S,ti)展开为以下的时空间分离形式


其中zki表示高维数据在低维空间中的嵌入。因此,学习空间基函数的过程转化为了对zki学习的过程。
LE 方法的思想是假设非线性的复杂高维数据在局部仍具有线性特征。如图2所示,首先通过最优权值构造近邻图来描述时空数据的局部时间属性,为每个样本T( :,ti)找到其最近邻的K个点组成下标集合Qi,使每一个数据点T( :,ti)都可通过局部最优方法用最近邻的K个点的线性加权组合进行重构

图2 拉普拉斯特征映射原理图Fig.2 Principle diagram of Laplace feature mapping

然后构建权重矩阵W=(ωij),计算基于集合Qi中的样本点对T( :,ti)进行线性重构的权重系数ωi,通过高斯核函数进行计算

设Z=(z1,z2,…,zn)为映射的低维时序特征,数据的低维嵌入表达可以通过最小化以下目标函数进行计算

经过简单的数学运算可以将目标函数(7)转化为以下形式[22]

其中L称为拉普拉斯矩阵,L=D-W,其中D为一个对角矩阵,其元素为W的每行之和,即Dij=∑iωij。根据上式构造拉格朗日函数对目标函数求解

式(9)的求解问题可以转化为一个求解特征值特征向量问题


2.2 基于ELM的时间系数建模


一般而言,非线性的时序动态模型可以描述为式(13)[23]

其中,da和du分别为最大输入滞后和最大输出滞后,式(13)一般称为非线性自回归外生模型。在数据建模方法的选择上,目前已经有各种模型方法被提出。本工作选择使用ELM 进行训练,来表示时间动态的非线性行为

ELM[24-25]是一种基于数据的模型。如图3所示,其本质上属于一种单隐层前馈神经网络(SLFN)。它理论上可以以任意精度逼近任意非线性函数,即具有普遍逼近能力。ELM与传统神经网络的区别在于ELM的输入层权值和隐含层阈值可以任意给定,一旦完成识别后它们的值在训练过程中都是固定的,因此当选定隐含层的节点数和隐含层的输出激活函数后,只需要学习输出层的权值。输出层权值的学习过程本质上是一个最小二乘问题,因此ELM的巧妙之处在于它可以将非线性学习问题转化为线性学习问题,大大降低了复杂度和操作时间[26]。

图3 单隐层前馈神经网络Fig.3 Single hidden layer feedforward neural network
给定一组输入输出数据集{(ut,yt)|ut∈Rnu,yt∈Rny,t= 1,2,…,L},其中nu和ny分别表示模型输入层和输出层中神经单元的个数。N为输出数据的样本数。因此具有N个隐藏节点的SLFN模型的输出函数可以表示为

其中,βi=[βi1,βi2,…,βiny]T表示连接隐含层中第i个隐藏节点到输出层的输出权重向量;ωi=[ωi1,ωi2,…,ωinu]T表示连接第i个隐藏节点和输入层的输入权向量;ηi表示第i个隐藏节点的阈值;οt表示t时刻模型的输出值,ωi⋅ut表示ωi和ut的内积,G(⋅)表示隐层的输出激活函数,一般选择Sigmoid函数或径向基函数(RBF)。


将上式转化为矩阵乘积的形式

矩阵H表示ELM 模型的隐含层输出矩阵,其中第i列表示隐含层第i个节点的输出向量,第j行表示在第j个时间点隐含层的输出向量。在ELM模型的学习过程中,输入权值ωi和隐层阈值ηi是随机生成的,与输入的训练数据无关。因此当隐藏层节点个数与隐藏层输出激活函数确定后,只有输出权重βi这一变量是未知的,它的解可通过对公式(17)求逆获得

其中H†表示矩阵H的Moore-Penrose(M-P)广义逆。
2.3 基于ELM的时间系数建模
将低阶神经网络模型得到的预测结果â(t)与前文LE 方法得到的空间基函数结合,对整个时空域的时空输出进行重构

3 实验验证
3.1 实验设置
为了验证本工作所提出的建模方法的模型性能,以三元软包锂电池为对象进行了实验和仿真。由于电池的厚度比电池的其他维度的尺寸要小得多,因此忽略了电池厚度方向上的温度变化,将电池的热过程简化为二维模型,将30 个传感器均匀分布在电池表面用于采集电池温度,如图4 所示。实验过程中电池的输入电流与电压如图5所示,每隔1 s 采集一次输入电流电压和每个传感器的温度数据,整个实验过程持续3474 s 共采集3474 组数据,取前2500 组数据作为训练集,后974 组数据作为测试集。

图4 三元软包电池尺寸与传感器布局Fig.4 Ternary soft pack battery size and sensor layout

图5 锂电池输入电流与电压信号Fig.5 Lithium battery input current and voltage signal
经过重复试验对算法和模型中的不同参数进行了优化调试,LE算法中取近邻点数取K=20,输入输出滞后选择da= 1和du= 1。考虑到电池热过程的非线性特征,这里ELM 模型的隐含层节点数选择N=50,激活函数选为Sigmoid 函数。设训练集的 温 度 数 据 为{T(S,ti)|S∈Ω,S= 1,…,ns,i=1,…,nt},其中ns=30和nt=2500。模型训练时,首先使用K近邻算法来寻找训练集中任意一个样本点T(S,ti)的20 个近邻点,并使用式(6)计算权重ωi。然后使用式(10)计算T(S,ti)在低维空间中的嵌入zki,并使用式(11)来计算低阶模型的阶数。最后所求的空间基函数可以由式(4)计算获得。获得空间基函数后,将采集的温度数据通过式(12)降维得到低阶的时序数据a(t),然后以电池的电流电压u(t- 1)及时序数据a(t- 1)作为模型输入,时序数据a(t)作为输出,根据式(14)使用ELM算法进行建模。对于测试数据集,将电池的电流电压数据输入训练好的ELM 模型中进行预测,获得时间系数的预测结果â(t),根据式(22)将时序数据â(t)重构为完整的温度数据T̂(S,t),然后与测试集中的真实温度数据进行对比,评估预测的效果。
为了评估比较不同方法的模型性能差异,定义如下的评价指标
(1) 相对误差(ARE)

(2) 时间标准绝对误差(TNAE)

(3) 均方根误差(RMSE)

3.2 实验结果分析
表1 为ELM 取不同激活函数的训练集验证结果,可以看出Sigmoid函数具有更高的精度。尽管Sigmoid 函数的计算时间高于ReLU 函数,但在相同数据量的情况下其0.021 s 的训练时间可以满足大多数场景的电池热过程建模需求。图6为实验第3000 s电池表面温度分布与预测结果的对比图。通过对比图6(a)与图6(b)可以看出本工作所提出的LE-ELM 模型能够很好地近似锂电池表面实际的温度分布。图7(a)与图7(b)分别是在同样实验参数设置下,线性模型KL-ELM与所提出的LE-ELM方法在3000 s 时刻锂电池表面温度预测结果的相对误差ARE 对比。可以看出KL-ELM 预测结果的ARE值在0.45 以内,而所提出的方法的ARE 值在0.19以内。这是因为所提出的方法是基于局部非线性降维方法构建空间基函数,可以更好地表征系统固有的非线性拓扑特征,而KL-ELM采用的是线性降维方法,对于锂电池热过程这种具有强非线性特征的分布参数系统时往往会产生较大的模型误差。

表1 激活函数性能对比Table 1 Activation function performance comparison

图6 实验3000 s时刻电池表面温度对比Fig.6 Comparison of battery surface temperature at the time of experiment 3000 s
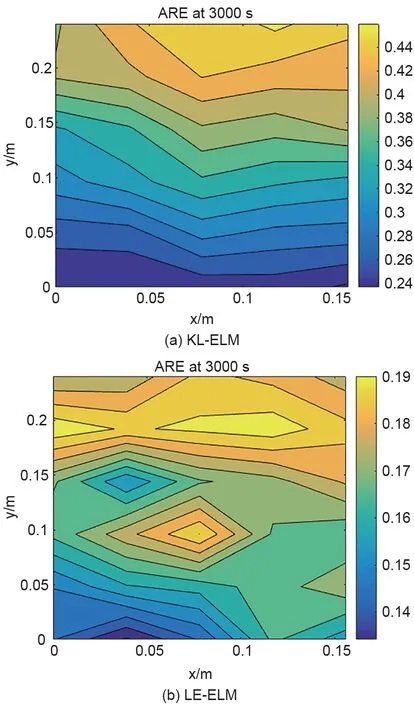
图7 KL-ELM与LE-ELM的ARE对比Fig.7 ARE comparison of KL-ELM and LE-ELM
图8 为测试集974 组数据的TNAE 仿真结果。TNAE反映了模型预测结果在不同传感器位置上与真实数据的偏差程度,用于衡量模型在时间维度上的准确度。从图中可以看出KL-ELM 的TNAE在[0.6376,0.8395]之间,而LE-ELM 的TNAE在[0.593,0.445]的区间内,这表明所提出的方法在时间维度上有着更好的建模性能。表2 为KLELM与LE-ELM在数据训练阶段及测试阶段的仿真时间与RMSE结果对比。KL-ELM在训练时间与测试时间上表现出了一定优势,但LE-ELM的RMSE在训练阶段与测试阶段都表现出了比KL-ELM更好的结果。

图8 KL-ELM与LLE-ELM的TNAE对比Fig.8 TNAE comparison of KL-ELM and LE-ELM

表2 模型性能对比Table 2 Model performance comparison
4 结 论
本工作提出了一种基于LE-ELM的锂离子电池热过程建模方法。首先使用基于LE 方法的局部非线性降维方法构建空间基函数,以表征系统固有的非线性拓扑特征;利用所得的基函数进行时空分离,获得原始数据的低阶时序表达;然后用ELM 以时间系数和对应的电流电压输入信号来近似低阶时序模型。最后集成辨识出的ELM模型与空间基函数,通过时空综合重构出锂离子电池的全局时空模型。为验证算法的有效性,使用所提出的方法对三元软包锂电池热过程进行建模,实验结果表明所提方法具有较高的预测精度。
