板蓝根挖掘装置的设计与试验
2022-10-19夏春龙陶桂香衣淑娟毛欣
夏春龙,陶桂香,衣淑娟,毛欣
(黑龙江八一农垦大学工程学院,黑龙江 大庆 163319)
板蓝根是我国常见的中药材,其根在中药上称板蓝根,叶称大青叶。由于它显著的药用价值和经济效益,具备较强的环境适应能力,黑龙江省许多地区将其作为大批量人工栽培的经济作物[1]。但由于板蓝根根系发达,收获时必须将土壤和根茎一起铲起,收获难度大。目前,国外根茎类挖掘装置主要针对花生、马铃薯、胡萝卜等农作物,没有针对板蓝根的挖掘装置,挖掘深度较浅,不适合板蓝根的收获[2]。目前,国内板蓝根挖掘装置主要有两类:一是通用性根茎类药材挖掘装置;二是改装薯类挖掘装置而来的板蓝根挖掘装置,但这两类挖掘装置对板蓝根的收获都存在适应性差、作业阻力大、根茎损失率高等问题。王薇[3]研制的板蓝根收获机松土铲,由两把立刀片和一把铲片组成,工作时负荷均匀的作用在铲体上,可较好地保持有效的挖掘深度。但铲片为三角形,根茎损失率较大。丁建民[4]研制的快速根茎类药材收获机,将挖掘铲设计成分段式平铲,同时优化了挖掘铲入土倾角,提高了挖掘铲的适用性。但分段式挖掘铲之间有间隙,会导致板蓝根根茎漏挖或卡住根茎,不适合板蓝根的收获。巩自卫[5]研制了一种长根茎类中药材收获机挖掘铲,该挖掘铲在铲刃与栅条之间添加了旋转环,旋转环可有效减少铲面壅土现象的产生。但铲刃对土壤的滑切作用较小,阻力较大。针对上述问题,本研究针对单垄双行种植模式的板蓝根设计的一种板蓝根挖掘装置,通过对挖掘过程的力学分析和单因素仿真试验,确定影响作业阻力的主要因素和参数范围,运用二次正交旋转组合试验确定挖掘铲的最佳参数组合,降低挖掘装置的作业阻力。将铲尖设计成锯齿形,并通过单垄双行板蓝根根茎在土壤中的轮廓尺寸设计挖掘装置的挖掘深度和工作幅宽,进而降低根茎损失率。
1 整体结构与工作原理
挖掘装置的结构如图1,主要由三点悬挂、立刀、挖掘铲组成,用于单垄板蓝根收获。挖掘铲置于装置的最前端,挖掘铲、立刀、三点悬挂之间为刚性链接,在工作过程中,挖掘装置悬挂于拖拉机后方,由拖拉机牵引向前运动,挖掘铲主要用于挖掘土壤和松碎土壤。立刀主要用于切割挖掘装置两侧的土壤和杂草,减少工作过程中挖掘装置两侧的阻力。
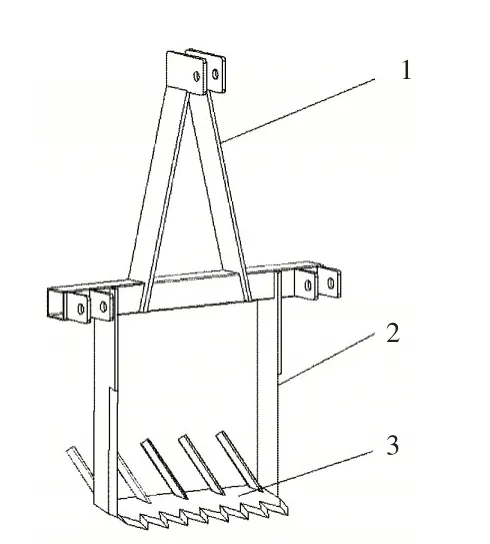
图1 板蓝根挖掘装置Figure 1 Digging device for isatidis root
2 关键部件的设计
2.1 挖掘铲设计
2.1.1 挖掘铲结构的设计 挖掘铲由V形输送栅条和锯齿形铲尖组成(图2),锯齿形铲尖的主要作用是利用锯齿形铲尖滑切作用较大的特点,将土壤切开,尽可能地减少铲尖的作业阻力。输送栅条将立刀和锯齿形铲尖切下的板蓝根和土壤混合物向后输送到清选筛上,并起到一定的破碎土壤的作用,在板蓝根和土壤混合物输送的过程中,输送栅条可以分散土壤的挤压力,并将破碎的土壤从栅条的间隙中及时的漏下去,以减少由土壤重力对挖掘装置产生的阻力。(1)锯齿形铲尖。板蓝根挖掘装置铲尖一般由单个钝角三角形(图3a)或单个锐角三角形(图3b)构成[6-8],三角形铲尖作业后留下一个V形土槽(图3c),V形土槽两侧的板蓝根根茎在较浅的位置被挖断,导致根茎损失率较大。为了减小挖掘装置两侧根茎损失率,将铲尖设计成由多个锐角三角形组成的锯齿形铲尖(图3d),这种铲尖作业后可留下一个矩形土槽(图3e),降低土槽两侧的根茎损失率。(2)V形输送栅条。V形输送栅条主要作用是将铲尖和立刀切下的土壤和板蓝根混合物向后输送到清选筛上,在此过程中栅条的阻力主要来自土壤的重力和摩擦力,板蓝根主要种植在沙土中,土壤黏附力忽略不计。由于板蓝根挖掘装置的工作深度较大,栅条需要克服的土壤和板蓝根混合物重力和摩擦力也很大,所以栅条需要有较大的强度。为保证栅条的强度,将栅条设计成90°V形,V形栅条可以增加栅条的强度,分散土壤对栅条的阻力。进而减少挖掘装置的作业阻力。

图2 挖掘铲Figure 2 Digger blade

图3 铲尖与土槽Figure 3 Shovel tip and soil bin
2.1.2 挖掘铲主要参数确定
(1)铲尖夹角β。铲尖夹角的大小对土壤的滑切程度有较大影响,当铲尖夹角增大时,铲刃对土壤的滑切作用降低,入土过程的阻力增大(图4)。为保证铲刃有较好的切土能力,铲尖夹角需要满足:

式中:v为土壤对钢的摩擦角;β为铲尖夹角。
土壤对钢的摩擦角一般取30°~36°,即铲尖夹角β<108°。铲尖夹角的选择也不宜过小,铲尖随着装置刃张角的减小,强度和耐磨性会下降。为保证挖掘装置的铲尖有良好的切土能力、强度和耐磨性,综合考虑取β=50°~90°。
(2)铲尖倾角α。铲尖倾角对挖掘装置的入土能力和作业阻力都有较大影响。铲尖上掘起物的受力分析(图5)。
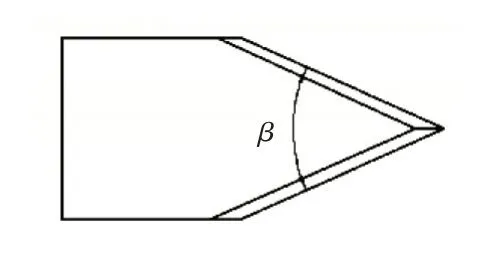
图4 铲尖夹角Figure 4 Shovel point Angle

图5 掘起物受力分析图Figure 5 Force analysis diagram of excavated material
根据受力图沿铲尖和垂直铲尖方向列方程组[9]:

式中:F=fN;N为铲尖对掘起物的支持力(N);G为掘起物的重力(N);P为掘起物在铲尖上移动所需要的力(N);F为掘起物在铲尖上运动时的摩擦力(N);f为掘起物与铲尖的摩擦系数。
方程组转换得:

由方程组转换出来的掘起物在铲尖上移动所需要的力和铲尖倾角关系式可以得出,掘起物在铲尖上移动所需要的力随着铲尖倾角的增大而增大,根据实际经验,铲尖倾角α一般小于25°。
(3)挖掘深度H。挖掘深度的设计要考虑单垄双行板蓝根根茎在土壤中的轮廓尺寸。为获得单垄双行板蓝根根茎在土壤中的轮廓尺寸,在板蓝根收获季节,在田间随机选取一根垄,挖掘并测量统计板蓝根根茎的尺寸,获得单垄双行板蓝根根部轮廓高度a与根部轮廓横向宽度b的主要分布范围分别为:250~330mm和250~400mm,单垄双行板蓝根根茎在土壤中的轮廓尺寸[10](图6)。由于土壤耕层的土质松软且养分充足,根茎在0~270mm的深度范围内分布密集且粗壮,深度超过270mm后,根茎较为稀疏且直径大多不超过3mm。为了降低作业阻力,提升挖掘装置的作业效率,将挖掘装置的挖掘深度设计为330mm。
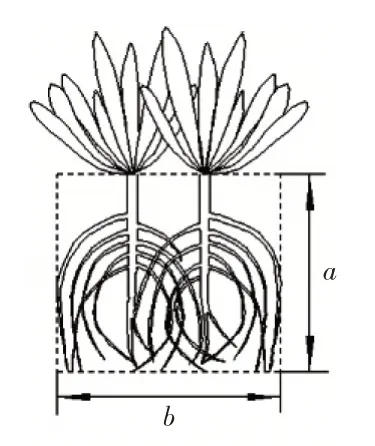
图6 单垄双行板蓝根在土壤中的轮廓图Figure 6 Outline of single ridge and double row isatidis root in soil
(4)工作幅宽M。挖掘铲的工作幅宽主要与单垄双行板蓝根根部轮廓横向宽度和机具行走路线偏差e有关,为了尽可能地减少根茎的漏挖,使得幅宽更加合理,挖掘铲的工作幅宽应大于板蓝根根部轮廓横向宽度与机具行走路线偏差之和,同时小于平均单垄宽度。即板蓝根挖掘铲幅宽的选择范围为:

式中:D为平均单垄宽度(mm);M为挖掘铲的工作幅宽(mm);b为板蓝根根茎在土壤中的分布宽度(mm);e为机具行走路线偏差(mm)。
经测量和计算平均单垄宽度为600mm,板蓝根根部轮廓横向的最大宽度为400mm,通过查阅文献拖拉机行驶偏差取5~8cm[11],为了便于挖掘铲的生产制作,挖掘铲的工作幅宽取500mm。
(5)挖掘铲长度。挖掘铲为了能够将板蓝根向后输送到清选筛上,挖掘铲的总体长度需要大于等于挖出根茎的长度。一般板蓝根的根茎被挖出的长度不超过400mm。所以将挖掘铲的长度设计为L=400mm。挖掘铲的长度等于铲尖长度l1与栅条长度l2之和,为了保证挖掘铲的整体强度,将铲尖长度l1设计为210mm,栅条长度l2设计为190mm(图7)。

图7 挖掘铲侧视图Figure 7 Side view of digger blade
(6)V形输送栅条倾角和间距。在栅条的输送过程中,铲尖对土壤的破碎程度较低,栅条的倾角大于铲尖倾角,增大了对土壤的破碎能力,并且栅条的外形为V形,随着栅条倾角的减小,V形的栅条对土壤挤压力的分散作用逐渐增大。通过查阅文献发现,输送栅条的倾角一般大于铲倾角且小于40°。
栅条在输送过程中,为保证根茎不从栅条间距中落下去,栅条间距必须小于等于单垄双行板蓝根根部轮廓横向宽度的一半,使得随机分布的根茎在栅条上至少有两个以上的栅条做支撑,单垄双行板蓝根根部轮廓横向宽度取统计范围内的最小值250mm,所以栅条间距需要小于等于125mm。同时考虑栅条间距越大,漏土能力越强,可降低挖掘阻力,本文将栅条间距设计为125mm。

式中:q为栅条间距(mm);j为单垄双行板蓝根根部轮廓横向宽度统计范围内的最小值(mm)。
2.2 立刀的设计
挖掘装置的铲尖只能在要求的深度切出一个横向断面,随着挖掘装置的前进,两侧土壤在挖掘铲不断抬升的作用下发生松动,导致挖掘装置的作业阻力较大。立刀可以在挖掘装置前进的过程中,切出两个纵向断面,降低挖掘装置两侧的阻力(图8)。刀刃的长度t为330mm,与挖掘深度保持一致。立刀的长度s应大于等于拖拉机下悬挂点最低高度与刀刃长度之和,该挖掘装置选用Ⅰ类悬挂,拖拉机下悬挂点最低高度为200mm,为了便于挖掘深度的控制,立刀长度设计为530mm。

图8 立刀Figure 8 Vertical blade
3 仿真试验与结果分析
3.1 土壤颗粒模型的建立
根据相关学者研究发现[12-16],沙土土壤颗粒是一种不规则的颗粒,主要分为球形颗粒、核形颗粒、片形颗粒、杆形颗粒,粒径约1mm,根据建模经验,颗粒模型尺寸可以不与真实颗粒保持一致,关键是颗粒的接触参数,如果直接按照真实粒径大小建模,计算机的计算量将成倍增加,仿真效率大幅度下降。为了提高计算机的仿真效率,本次试验将颗粒外形进行简化,选取标准球形拼出四种颗粒的形状,并将尺寸放大3倍,组成土壤颗粒的标准球半径设置为3mm。颗粒模型图如图9。

图9 土壤颗粒模型Figure 9 Soil particle model
3.2 根茎模型的建立
板蓝根根茎的形状具有不规则性,为了建立与实际更加贴合且具有一定的代表性的板蓝根根茎模型,首先对根茎进行简化处理,将直径小于3mm的侧根忽略不计,通过对根茎尺寸的测量获得根茎生长节点的坐标[17],用417个小球拼出根茎的形状,通过调整每个小球的坐标和直径,实现对根茎中每个根茎的方向和直径的控制。建立板蓝根根茎模型如图10。
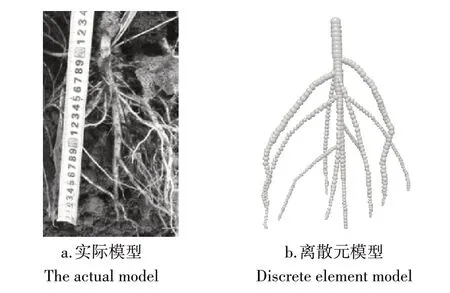
图10 板蓝根根茎模型Figure 10 Rhizome model of isatidis root
3.3 土壤模型的建立
为了使仿真试验与田间条件更为接近,在土壤模型中添加根茎模型,根茎模型生成过程如图11,生成的土壤模型如图12,尺寸为2000mm×700mm×450mm。为了使生成根茎的位置与播种方式接近,将根茎的颗粒工厂设置在土壤模型中间,生成方式为动态,最终生成了19棵根茎。为了保证最终生成的根茎在土壤中的相对位置不发生变化,在根茎生成瞬间,用土壤颗粒静态生成的方式填充根茎底部,在每次土壤颗粒堆积稳定后,将土壤颗粒工厂向上移动,重新生成土壤颗粒,直至根茎全部被土壤颗粒覆盖。
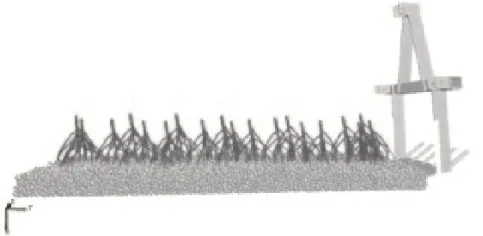
图11 根茎模型生成过程Figure 11 Rhizome model generation process

图12 土壤模型Figure 12 Soil model
3.4 模型参数标定
3.4.1 模型参数标定参照试验 试验地点为大庆市大同区板蓝根种植基地,以挖掘装置的田间作业阻力为指标,进行模型参数标定的参照试验。试验中铲尖倾角、铲尖夹角、栅条倾角分别暂取12°、60°、30°。前进速度为5km·h-1,挖掘装置作业阻力采用拖拽法测量,为了尽可能地保证拖拽方向与前进方向保持一致,选用型号一致的两台拖拉机,试验时两台拖拉机行驶在同一垄沟中,两段捆绑带分别连接在两拖拉机的前方配重托架上和后方牵引架上,尽可能地使绑带与前进方向没有夹角,中间连接圆S型拉压力传感器,试验首先测得后方拖拉机空载阻力,后期试验阻力减去空载阻力,得到挖掘装置作业阻力。试验设备主要由两台宁波354拖拉机、圆S型拉压力传感器、力值显示控制仪、逆变器、蓄电池等部分组成。田间设备调试和阻力测试如图13和图14。试验重复5次,取平均值。


图13 设备调试Figure 13 Testing of equipment

图14 阻力测试Figure 14 Working resistance test
式中:FZ为作业阻力(kN);FH为试验阻力(kN);FK为空载阻力(kN)。最终测得挖掘装置阻力为5.254kN。
3.4.2 本征参数 本征参数是材料的固有属性,参考文献丰富,测量方法也较为成熟,其中挖掘装置与土壤的参数参考黄玉祥等[12]的研究。土壤密度利用环刀法测得为1341kg·m-3,根茎的密度通过排水法测得为1049.58kg·m-3。根茎的泊松比和剪切模量利用万能材料试验机进行单轴压缩试验,试验截取长度12mm的圆柱形根茎试样,压缩速度为5mm·min-1,加载位移为5mm,通过试验前后根茎试样长度和直径的变化,计算出根茎泊松比和剪切模量分别为0.42和1.67×106Pa
3.4.3 接触参数范围土壤颗粒之间和土壤颗粒与根茎之间均使用HertzMindlin with Bonding接触模型,参考相关土壤与根茎类的仿真研究成果[17-21],综合分析后,确定接触参数的取值范围(表2)。
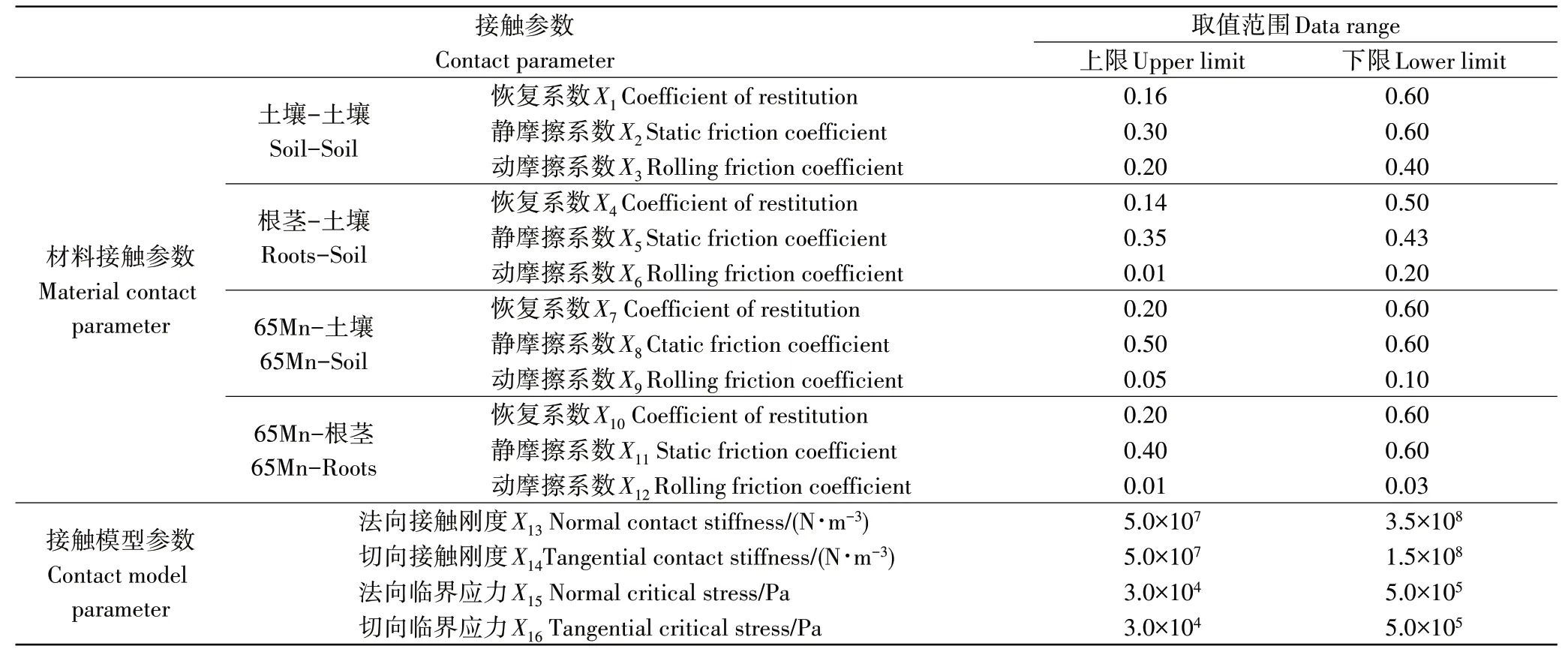
表2 待标定接触参数取值范围Table 2 Range of contact parameters to be calibrated
3.4.4 接触参数标定方法及结果离散元参数标定常用Plackett-Burman试验提取显著参数,然后通过最陡爬坡试验与真实试验相结合的方法完成参数标定,但通过祝英豪等[22]研究发现,为了提高标定参数的可靠性可将Plackett-Burman试验可进行省略,直接进行最陡爬坡试验,该试验方法可减少工作量,保证标定试验的可靠性。本研究引用该方法,将接触参数范围分成步阶总数x为5的最陡爬坡试验,令各步阶次序的接触参数组(X1、X2、X3、X4、X5、X6、X7、X8、X9、X10、X11、X12、X13)为Ax,步长为A,则各步阶次序接触参数组的取值符合式(8),获得的仿真标定试验方案如表3。试验时用solidworks软件对参照试验中的挖掘装置建模,并导入EDEM软件中,仿真作业条件与参照试验保持一致,试验结果如表4,对作业阻力YF进行拟合,得到式(9),式(9)中决定系数R2为0.982,将参照试验作业阻力值带入拟合方程得到步阶次序x为2.975,将步阶次序2.975带入式(8),最终获得接触参数组A2.975如表5。将标表5中的接触参数输入EDEM软件中进行仿真模型验证,得到作业阻力为5.144kN,仿真模型验证试验与实际田间参照试验作业阻力误差2.09%,误差较小,表明参数组A2.975,可用于挖掘装置仿真试验。

3.5 多因素仿真试验
3.5.1 试验方案参数设计分析无法确定铲尖倾角、铲尖夹角和栅条倾角的具体数值,为了进一步研究铲尖倾角、铲尖夹角和栅条倾角对挖掘装置作业阻力的影响,确定三个参数的最佳几何参数组合,对铲尖倾角、铲尖夹角和栅条倾角采用三因素五水平正交旋转组合设计试验,因素水平编码表如表6。

表3 仿真标定试验方案Table 3 Result of simulation calibration test

表5 接触参数标定结果Table 5 Calibration results of contact parameters
3.5.2 结果与分析仿真试验方案与仿真试验结果如表7,各因素在选取的试验参数范围内,通过多因素仿真试验得到挖掘装置作业阻力的变化范围为4.988~6.525kN。
(1)作业阻力回归模型的建立与显著性检验。根据方差分析结果可知(表8),挖掘装置作业阻力的回归模型极显著(p<0.01),拟合效果较好。为了获得简化的回归预测模型,剔除方差分析表中的不显著项,得到试验指标与试验因素的回归方程为:


表6 因素水平编码Table 6 Coding of factors and levels
拟合后的回归方程决定系数R2=0.9483,说明试验因素与试验指标之间存在二次关系。
(2)优化求解与仿真验证试验。为获得挖掘铲最佳结构参数,运用Design Expert 11软件对仿真结果进行优化求解。约束条件为:

通过优化求解,当铲尖倾角为10.77°铲尖夹角为63.92°栅条倾角为23.33°时,挖掘装置阻力为4.968kN,作业阻力最小。根据优化结果进行仿真验证试验,为了方便后期挖掘装置的加工制造,将优化的参数结果进行圆整,最终铲尖倾角取11°、铲尖夹角取64°、栅条倾角取23°,试验重复5次并取平均值,挖掘装置作业阻力为4.935kN,理论优化结果与验证试验结果基本一致,优化结果可行。
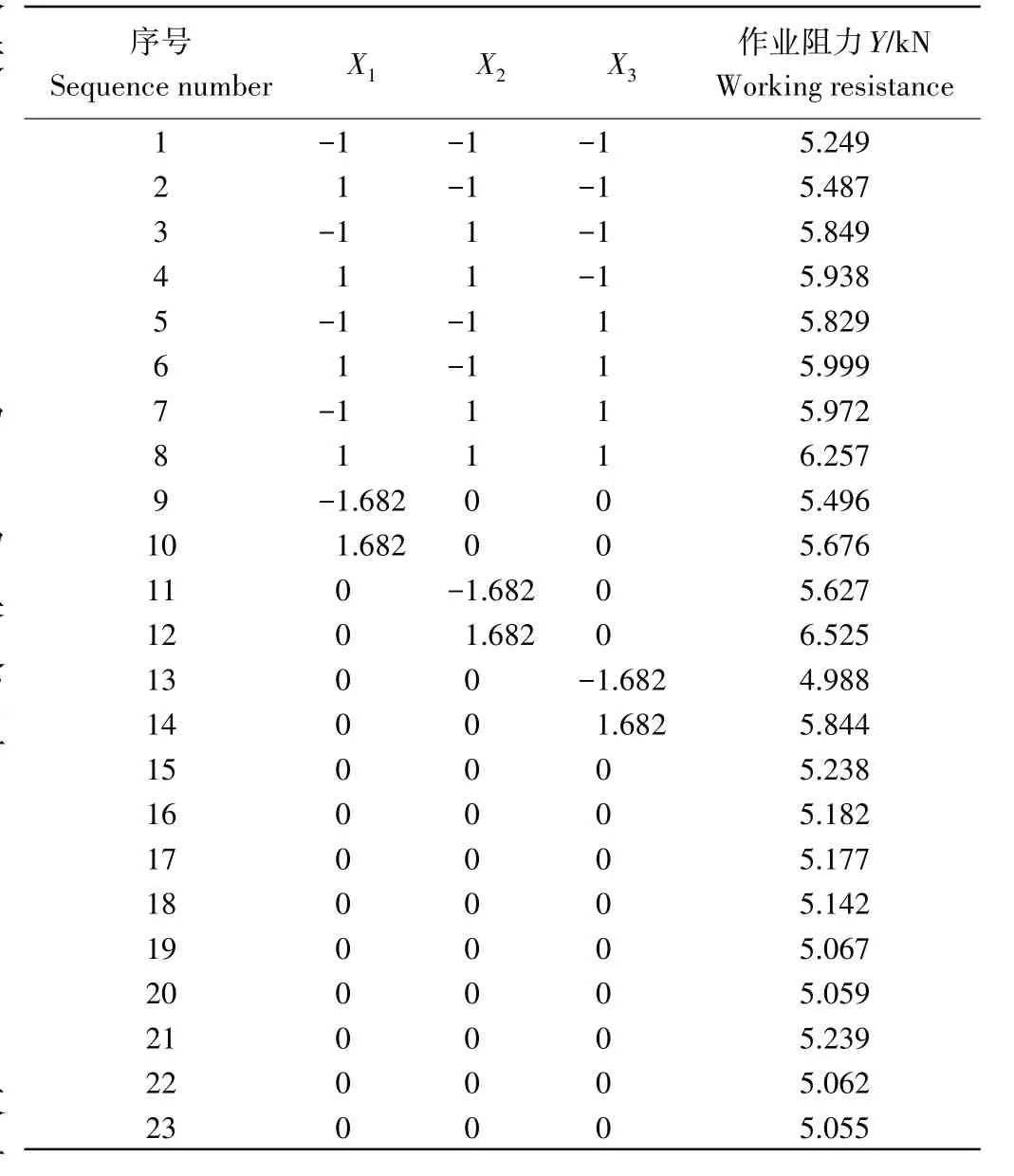
表7 二次回归正交旋转组合设计方案与结果Table 7 Quadratic regression orthogonal rotation combination design scheme and results
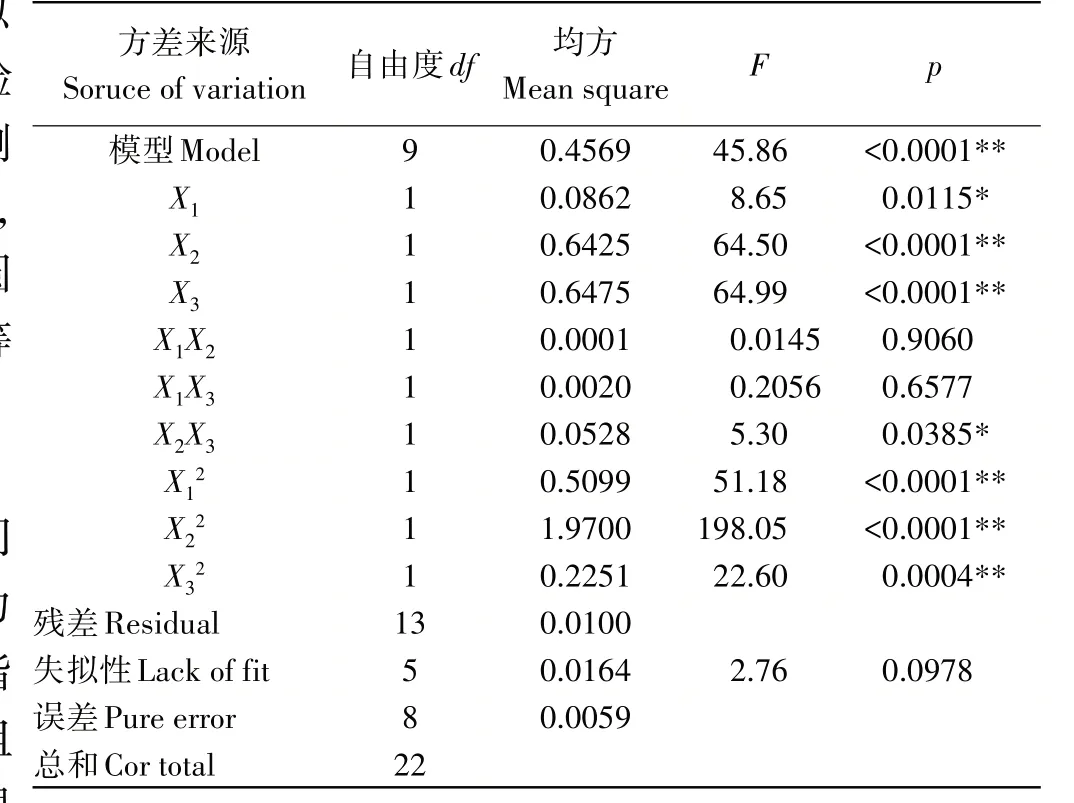
表8 作业阻力回归模型方差分析Table 8 Variance analysis of working resistance regression model
4 田间试验
4.1 试验条件及方法
为检验挖掘装置的作业性能,于2021年10月在大庆市大同区板蓝根种植基地进行田间试验证试验和对比试验,田间验证试验的试验条件与仿真试验保持一致。由于钝角三角形铲尖挖掘装置作业幅宽多为双垄,锐角三角形铲尖挖掘装置作业幅宽多为单垄,所以对比试验选用锐角三角形铲尖挖掘装置作为对比试验装置。试验田的土质为沙壤黑土,运用环刀测试法测得表层、耕层和犁底层的土壤容重分别为1.242,1.341,1.788g·cm-3。试验设备主要由两台宁波354拖拉机、圆S型拉压力传感器、力值显示控制仪、逆变器、蓄电池等部分组成。
4.2 试验指标
试验以作业阻力和根茎损失率为试验指标,田间作业阻力与根茎损失率测量如图15和图16。作业阻力和根茎损失率是评价挖掘装置作业性能的两个重要指标,作业阻力小可降低挖掘装置作业时的功耗,作业阻力的测量方法与模型参数标定参照试验一致。降低根茎损失率可保证板蓝根的产量,在试验后,先捡拾整棵的板蓝根,剪去叶子,测量整颗的根茎质量,然后挖出收获深度范围内损失的根茎,并测量损失根茎的质量,试验重复5次,取平均值。

式中:GN为根茎损失率(%);GZ为收获深度范围内损失根茎的质量(kg);GS为整颗的根茎质量(kg)。
4.3 田间试验结果分析
通过田间验证试验得到,在与仿真试验条件一致时,该挖掘装置的平均作业阻力为4.693kN,平均根茎损失率为1.12%,田间作业阻力与仿真作业阻力误差为5.157%,验证了仿真试验结果的可靠,在对比试验中锐角三角形铲尖挖掘装置的作业阻力为5.125kN,根茎损失率为2.16%,两个评价指标均明显大于锯齿形铲尖挖掘铲。
5 讨论与结论
由于目前板蓝根收获过程中大多使用通用性根茎类药材挖掘装置,或者使用改装薯类挖掘装置而来的挖掘装置,导致板蓝根的收获过程存在作业阻力大和根茎损失率高的问题。主要因为这两类挖掘装置对板蓝根的收获存在适应性差异。因此本研究根据板蓝根的种植方式、根茎在土壤中的轮廓尺寸以及仿真试验,设计了一种板蓝根挖掘装置,降低了板蓝根的挖掘阻力和根茎损失率。

图15 作业阻力测量Figure 15 Working resistance measurement

图16 根茎损失率测量Figure 16 Measurement of root loss rate
模型参数标定试验表明,当接触参数组为A2.975时,得到仿真作业阻力为5.144kN,该结果与实际田间参照试验作业阻力较为接近,表明参数组A2.975,可使土壤模型较好的模拟田间土壤,在仿真试验过程中,参数的设置较为方便,且参与到最陡爬坡试验中的参数越多,越不容易漏掉对作业阻力有影响的参数,通过对Plackett-Burman试验的省略,可减少了模型参数标定的工作量,提高模型参数标定效率。
通过正交旋转仿真试验得到挖掘铲的最佳参数组合,当铲尖倾角取11°、铲尖夹角取64°、栅条倾角取23°时,挖掘装置作业阻力最小,并通过田间验证试验和对比试验证明了该挖掘装置的作业阻力小和根茎损失率低的优点。但通过仿真试验结果和田间试验结果对比可得,仿真试验工作阻力略大于田间试验工作阻力,原因分析:仿真试验是在理想状态下进行的,很难模拟出田间真实的作业的条件,且Hertz-Mindlin with bonding接触模型无法做到仿真模型与真实模型完全一致。
