丘陵山地马铃薯精量中耕施肥机设计与仿真分析
2022-10-19方雪峰沈鹏宁旺云陈立畅
方雪峰,沈鹏,宁旺云,陈立畅*
丘陵山地马铃薯精量中耕施肥机设计与仿真分析
方雪峰1,沈鹏2,宁旺云1,陈立畅1*
1. 云南农业大学机电工程学院, 云南 昆明 650201 2. 东南大学机电工程学院, 江苏 南京 210000
针对现有小型丘陵山地马铃薯中耕施肥机施肥不均匀、施放位置和施放量控制不精确、肥料利用率较低等问题,在现有小型丘陵山地马铃薯中耕施肥机分析研究的基础上,结合云南省马铃薯种植农艺以及中耕施肥农艺要求,设计了一种适合云南省丘陵山地马铃薯种植的精量中耕施肥机。该施肥机包括行走装置、排肥装置和检测控制系统。排肥装置采用垂直螺旋式排肥器,其螺旋外径为35 mm,螺旋内径为10 mm,螺距为25 mm,螺旋厚度为1 mm,螺旋有效长度为150 mm,螺旋的极限转速为4.7 r/s。检测控制系统采用STC12C5A60S2单片机为控制核心,通过接近开关检测判断马铃薯植株生长位置,并根据当前设定的施肥量精确控制电机转速和启停,实现间歇性精量施肥。利用ANSYS Workbench对排肥螺旋三维实体模型进行静力和模态分析,结果表明:排肥螺旋的基本频率为2997.8 Hz,且最大应力为2.9872 MPa,远小于其许用应力,故满足设计要求。本研究为丘陵山地马铃薯精量施肥机具的研究与设计提供了参考方案。
马铃薯精播; 施肥机; 设计
马铃薯是全球第四大粮食作物,仅次于小麦、稻谷和玉米[1]。我国是马铃薯种植和生产大国,种植面超过667万hm2,年总产量约占全球的四分之一,种植面积和总产量均位居世界第一。云南省是我国较早种植马铃薯的省份之一,由于该地区具有日照充足、土质疏松和有机质含量高等马铃薯种植的先天优势[2,3],马铃薯已经是云南省重点发展的五大农业产业之一,其种植面积仅次于水稻和玉米。云南省马铃薯种植面积和总产量均位居全国第三[4],根据云南省农业农村厅的统计数据显示,2018年,云南省马铃薯种植面积达56.28万hm2,同比增1.77万hm2,增幅达3.2%;产量(折粮)209.2万t,同比增10.2万t,增幅达5.2%;单产4122 kg/hm2,同比增67.5 kg/hm2,增幅达1.8%。为促进节本增效、助农增收和马铃薯产业持续发展,我国正努力实现马铃薯全程机械化种植。
目前,马铃薯种植的全程机械主要有马铃薯播种机、中耕施肥机、马铃薯收获机等[5],马铃薯中耕施肥作为马铃薯种植的必要管理环节,对促进马铃薯植株生长和提高马铃薯产量具有很大的现实意义,马铃薯中耕施肥机械也是实现全程机械化的重要组成部分。在现有小型中耕施肥机械[6-8]的基础上,重点针对精准精量施肥技术的内容,解决中耕施肥机施肥均匀性,提高肥料的利用效率和作物的生长效果,是中耕施肥机械需要解决的一个重要问题。因此,研发适合云南省丘陵山地马铃薯种植的精准精量中耕施肥机具有迫切性和必要性,不仅能弥补云南省相关机具的空缺,还能促进云南省马铃薯全程机械化发展的进程。
1 机械结构及工作原理
1.1 结构设计
马铃薯种植模式是中耕施肥机具设计的重要参考依据,云南省秋季马铃薯其种植采用垄作,垄作可分为单垄单行和单垄双行两种模式,单垄单行相对单垄双行来说,是在保证垄高的前提下减少垄宽的栽植模式,其栽植密度小,单株结薯多,薯块大,更加便于机械化生产作业。根据中华人民共和国农业行业标准NY/T3483-2019马铃薯全程机械化生产技术规范中的要求,单垄单行种植的马铃薯种薯沿垄的中心线分布[9],种植株距为16~30 cm,垄高为20~25 cm、垄间距为60~90 cm。单垄单行马铃薯种植模式,如图1所示。

图 1 单垄单行马铃薯种植模式图
目前云南省马铃薯中耕施肥大多采用小型中耕机具,其工作原理是行走地轮通过链传动带动外槽轮式排肥器进行施肥,在中耕施肥作业过程中,主要存在以下缺陷:1、受土壤湿度和地表起伏变化等情况的影响,行走地轮容易发生空转和打滑现象,施肥机滑移或相对静止时,排肥器仍在持续排肥,因此对施肥均匀性和一致性产生较大偏差;2、在施肥机前进过程中排肥器在持续不断排肥,而马铃薯种植有16~30 cm的株距,施在马铃薯植株之间的肥料有部分难以被吸收,从而造成肥料的利用率低;3、由于这类机具大多需要作业人员推动行走,当施肥机前进速度发生变化时,其施肥量不能准确匹配机具行走速度,从而造成施肥不均匀和施肥量不精确的问题。
在现有小型丘陵山地中耕施肥机的基础上,结合马铃薯种植农艺、中耕施肥农艺和马铃薯全程机械化生产技术规范要求,丘陵山地马铃薯精准定量中耕施肥机设计内容如下:
(1)排肥装置采用垂直螺旋式排肥器,用直流减速电机驱动;
(2)检测控制系统根据设定的施肥量来精确控制直流减速电机和排肥器垂直螺旋的转速,从而保证施肥量的精量性;
(3)检测控制系统利用传感器检测施肥机前进过程中两侧的马铃薯,从而判别马铃薯植株生长位置,控制系统通过控制直流减速电机间接对垂直螺旋式排肥器进行控制,实现施肥机的间歇性精准施肥;
(4)由于沟底左右两垄上均有种植马铃薯,且种植位置通常是错开的,所以马铃薯精量中耕施肥机两侧的检测控制系统需相互独立;
(5)马铃薯精准中耕施肥机施肥量与机具行走的速度无关,仅取决于人工设定的施肥量[10]。
丘陵山地马铃薯精准精量中耕施肥机,主要由行走装置、排肥装置和检测控制系统三部分组成,施肥机结构示意图如图2所示。

1. 主机架 2.柴油发动机 3.传动机构 4.肥料箱 5.电控盒 6.操控机构 7.直流减速电机(排肥电机) 8.排肥螺旋 9.电容式接近开关 10.施肥管道 11.悬挂架 12.驱动轮 13.挡板
1.2 工作原理
在马铃薯种植田间启动柴油发动机,柴油发动机通过链传动带动驱动轮转动,从而使整个机具向前前进,当固定在施肥管道两侧的电容式接近开关检测判别到马铃薯植株的生长位置并将信号传输给STC12C5A60S2单片机,单片机根据施肥作业前设定的施肥量进行计算分析,然后通过电机驱动器调整直流减速电机的电压实现在一定范围内的无极调速,从而精确控制排肥电机的转速,而排肥螺旋由排肥电机驱动。当排肥电机转动时长达到单片机中定时器的设定值T时,电机立即停止运转,完成单株马铃薯施肥。当电容式接近开关检测到下一株马铃薯植株的生长位置时,完成上述动作,一直循环直至完成整个田间施肥,达到对肥料施放位置、施肥量的精确控制和间歇性施肥,实现中耕施肥机在丘陵山地间歇性精准精量的施肥效果。
2 关键部件设计
2.1 肥料物理性质测定
肥料的物理特性与排肥装置的设计有重要关联[11],根据马铃薯中耕施肥农艺要求,马铃薯中耕施肥阶段所用肥料多为暗白色、颗粒状、微溶于水的马铃薯专用复合肥,本文对云南天腾化工有限公司生产的马铃薯专用复合肥(云农肥2011准字0374号)的物理特性进行测定,测定的物理量有含水率、粒径、球形度、自然休止角、体积密度和千粒重等[12]。根据肥料颗粒等效直径的不同,可将其分为大颗粒和小颗粒两种。复合肥的物理特性,如表1所示。
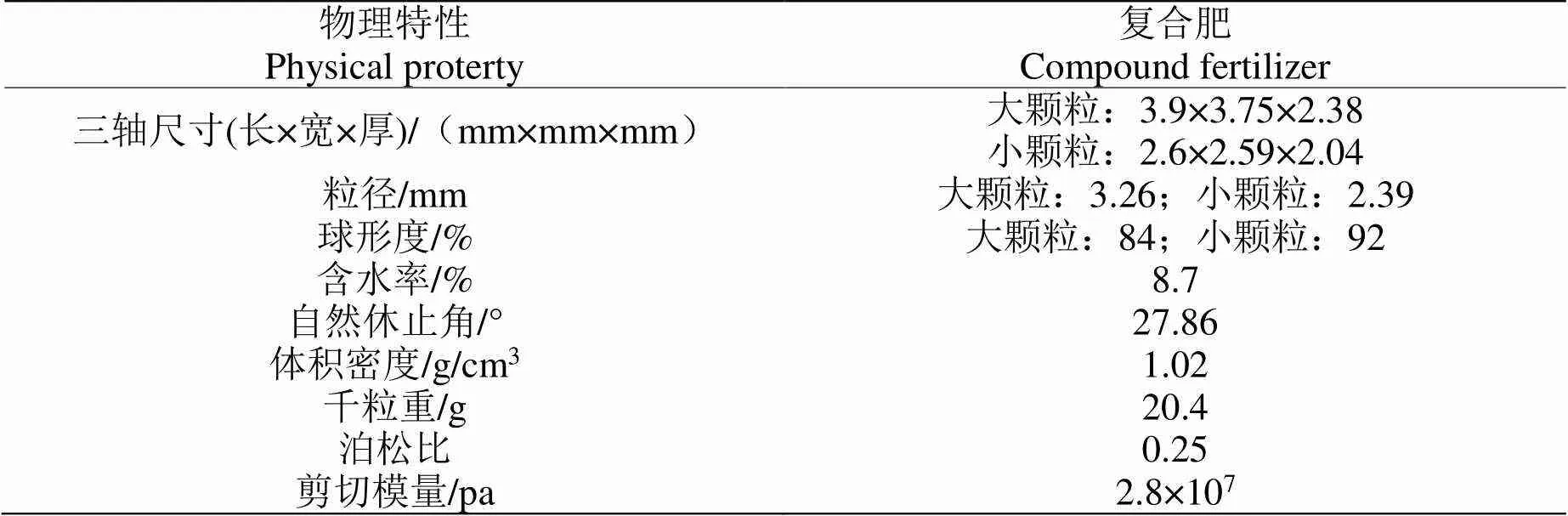
表 1 复合肥的物理特性
2.2 排肥装置设计
排肥装置是丘陵山地马铃薯精准精量施肥机的核心部件,排肥装置的设计主要包括装置整体结构设计、肥料箱的结构参数设计、排肥器类型的选定及其结构参数的确定,排肥装置整体三维结构示意图如图3所示,其主要由肥料箱、直流减速电机(排肥电机)和垂直螺旋式排肥器等组成。

图 3 排肥装置三维结构示意图
2.2.1 肥料箱设计肥料箱是排肥装置的储肥部件,一方面其容量决定了中耕施肥机单次作业所能排施的最大肥量。另一方面箱内肥料是通过其自身重力进入施肥管道中的螺旋叶片上,大量肥料的堆积会对箱体底部产生较大的压力[13],导致肥料颗粒之间的内摩擦力较大,如果肥料箱的容量和内壁倾角设计不合理,施肥的连续性和稳定性都会受到破坏,严重时会造成排料口堵塞。故肥料箱内壁的最小倾角q需大于肥料平均自然休止角27.86°,从整机配合考虑,取倾角为35°和32°。肥料箱采用小型的单箱设计,两侧壁上开有55´70 mm的两个槽口作为落肥口。根据肥料箱[14]容量计算式可求得肥料箱的容量需求为24.26 L,肥料箱三视图如图4所示,肥料箱容量约为30 L满足要求,可保证施肥的连续稳定。
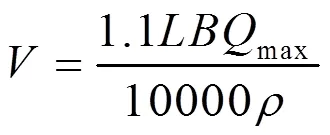
式中:为肥料箱体积,L;为装满一箱肥料所能施肥的距离,m;为工作幅宽,m;max为单位面积最大施肥量,kg/hm2;为肥料的密度,kg/L。
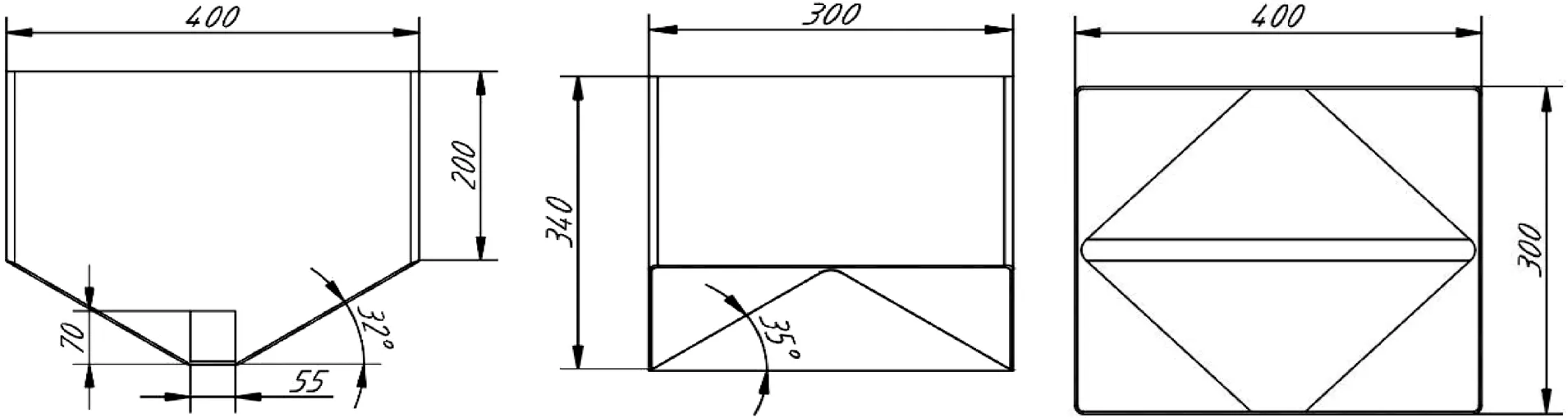
图 4 肥料箱三视图
2.2.2 排肥器主要参数确定根据施肥机设计要求和复合肥的物理特性,采用垂直螺旋式排肥器,螺旋式排肥器单位时间内的排肥量是衡量排肥装置排肥性能的一个重要指标。单位时间内排肥量的稳定性和均匀性直接决定了排肥装置的稳定性和均匀性。其垂直螺旋式排肥器的排肥量为:

式中:为单位时间内的排肥量,g/s;为排肥螺旋的外径,mm;为排肥螺旋的内径,mm;为螺距,mm;为螺旋转速,r/min;为肥料密度,g/cm3;为排肥螺旋的填充系数,一般取0.7~0.95[15]。由计算公式可看出,螺旋式排肥器单位时间内的排肥量与、、、、和这些参数有关,想要调整排肥器单位时间内的排肥量,需要改变排肥器的结构参数和螺旋的转速,但想改变排肥器的机械结构在实际作业过程中是很难实现的。因此,对于结构参数固定的排肥器,只能通过改变螺旋的转速来改变排肥器单位时间内的施肥量。根据排肥装置设计和使用要求以及复合肥的物理特性,排肥器的设计参数为:排肥螺旋的外径为35 mm,螺旋内径为10 mm,螺距为25 mm,螺旋厚度为1 mm,螺旋有效长度为150 mm,螺旋升角为12°。


考虑到不同的物料特性的影响,则:

式中:为肥料质量,kg;为物料的综合系数;max为螺旋最大临界角速度;rad/s;0为螺旋的半径,mm;max为螺旋最大临界转速,r/min。根据螺旋的外径=35 mm,=28[19]。可得max=4.7 r/s。
3 检测控制系统设计
3.1 控制方案设计
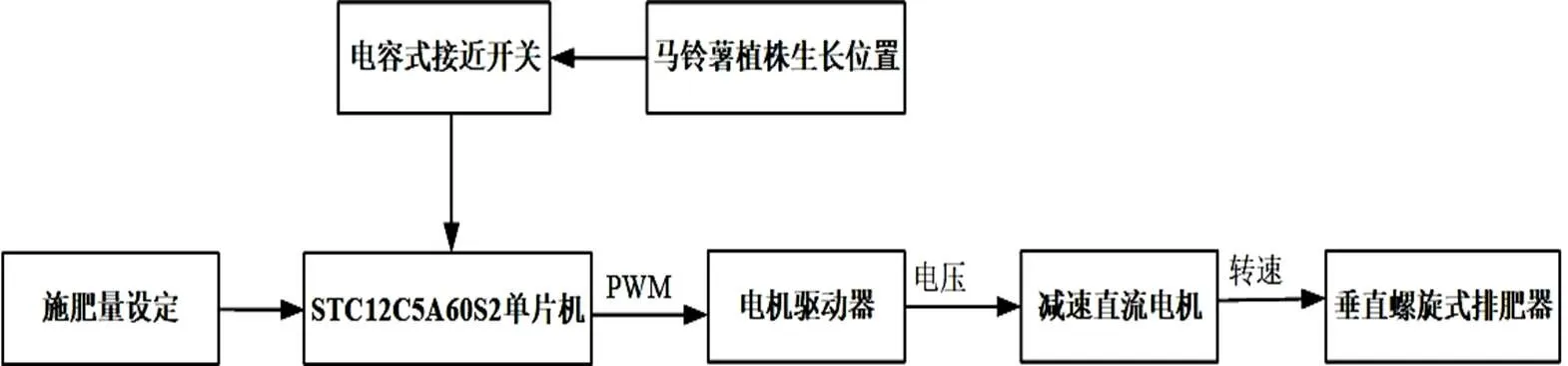
图5 精量施肥控制系统原理图
3.2 硬件电路设计
检测控制系统输入信号为检测马铃薯植株生长位置的电容式接近开关量和施肥量的人工设定值,执行机构为排肥电机。检测控制系统根据电容式接近开关检测信号,利用单片机控制排肥电机的启停,根据作业前人工设定的施肥量调节排肥电机PWM信号的占空比,从而精确控制排肥电机的转速。控制系统选用的微处理器为STC12C5A60S2单片机,系统电路主要包括电源模块、施肥量模块、电机驱动控制模块和马铃薯植株生长位置检测模块,电路原理图如图6所示。
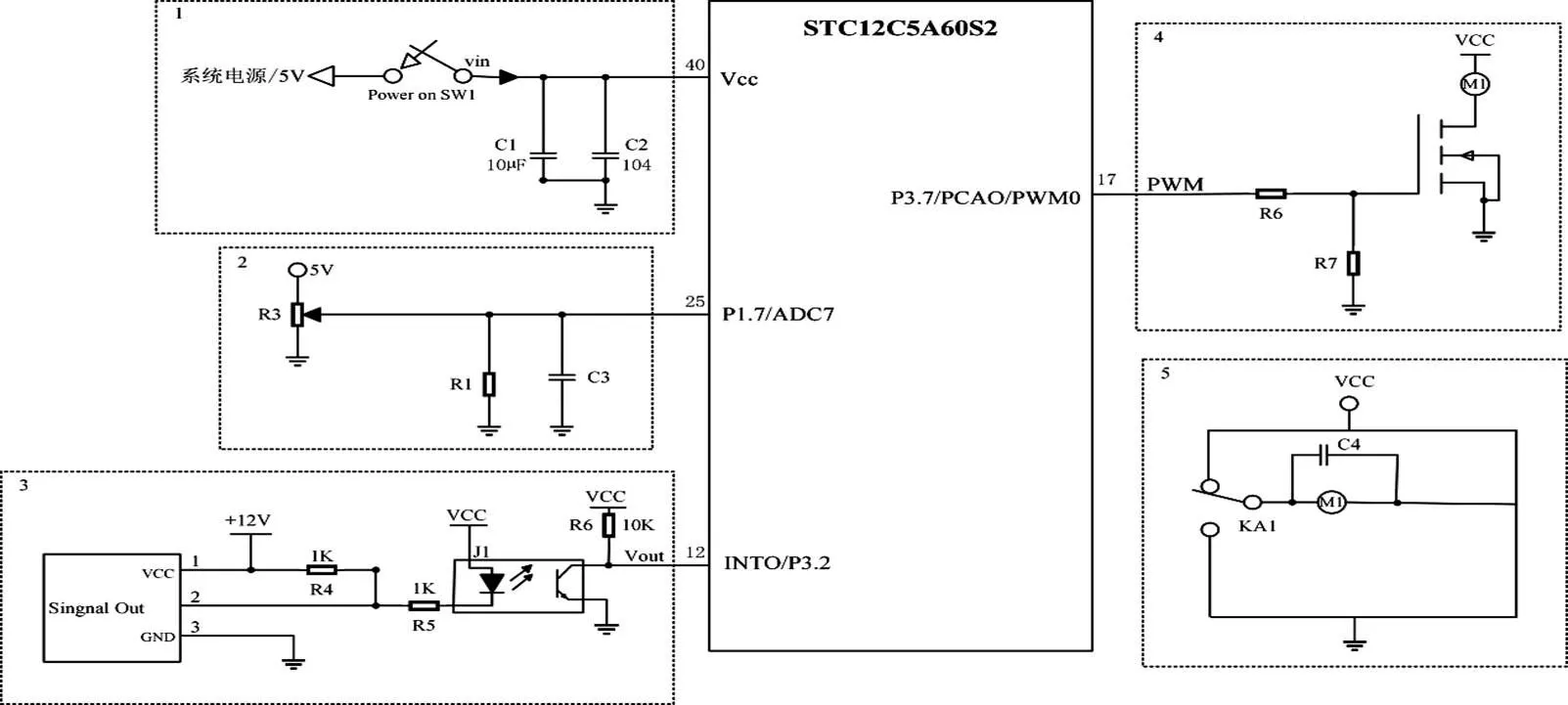
图6 电路原理图
1.电源模块 2.施肥量设定模块 3.马铃薯植株位置检测模块 4,5.排肥电机驱动控制模块
直流减速电机(排肥电机)采用单MOS管驱动,微处理器选择单PWM输出模式,由于排肥电机在施肥作业过程中涉及启停,因此采用继电器驱动。施肥量设定由微处理器的A/D转换模块检测,A/D转换将模拟输入信号转换为电信号的10位二进制表示,参考电压为Vcc,通过设定施肥量电位器输入微处理器电压的阻值,即可设置单片机P1.7/ADC7的AD采样电压,经AD转换后的值为[18]
式中:value为AD转换值,valueÎ[0,1024];u为AD采样电压(V),uÎ[0,5];cc为主控芯片供电电压(5V)。
3.3 软件程序设计
该施肥机检测控制系统采用Keil C语言对软件进行模块化程序设计,其包括马铃薯植株生长位置检测程序、施肥量设定模块、排肥电机驱动控制程序和定时器中断模块。软件程序流程图(图7)。

图7 软件程序流程图
4 仿真分析
为了验证垂直螺旋式排肥器的排肥螺旋是否满足设计和使用要求,采用ANSYS Workbench仿真平台对排肥螺旋进行静力和模态分析。
4.1 静力学分析
利用SolidWorks软件对排肥螺旋进行建模,由于排肥螺旋是相对复杂的装配体,因此在建模过程中需要对模型进行必要的简化。排肥螺旋三维实体模型,如图8所示。
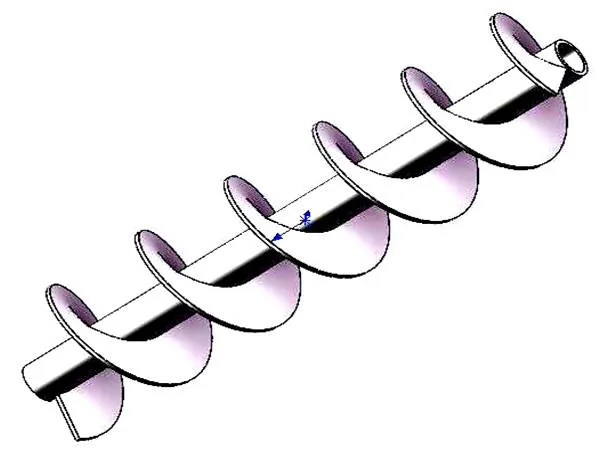
图8 排肥螺旋三维实体模型
排肥螺旋材料为结构钢,采用二阶四面体实体单元SOLID187对实体模型进行网格划分,划分后网格节点数量为363212个,单元数量为197342个。网格划分结果如图9所示。

图9 网格划分
对排肥螺旋进行边界约束和施加均布载荷,边界条件添加如图10所示。由于螺旋叶片与螺旋轴是通过焊接方式连接在一起的,故可视其为一个整体,因此只需要对螺旋轴的两端进行边界位移约束。对顶端添加、、方向的位移全约束,方向是螺旋轴的轴线方向,故对底端添加、方向的位移约束[20]。

图 10 边界条件
在后处理过程中得到排肥螺旋的等效位移云图和等效应力云图,分别如图11、12所示。通过云图可知:最大位移发生在螺旋叶片的边缘处即该位置最容易发生形变,越靠近螺旋叶片根部位移量越小,在螺旋叶片根部处的变形量基本接近于0;螺旋叶片根部处的等效应力值最大即该位置最容易被破坏,越靠近螺旋叶片边缘等效应力值越小,在螺旋叶片边缘处的等效应力值基本接近于0。结果显示最大应力为2.9872 MPa,明显远小于其许用应力;最大变形量为0.00109 mm,即机具在载荷作用下产生的弹性变形量,要求小于或等于机具工作性能所允许的极限值[],[]=0.01 mm,[]=0.00109 mm≤0.01 mm,故满足设计要求。

图 11 等效位移云图

图 12 等效应力云图
4.2 模态分析
由于负载在持续不断的变化可能导致排肥螺旋产生激励共振效应,从而引起排肥螺旋的严重变形或无法正常工作甚至是造成结构损坏等情况[21],因此只对排肥螺旋进行静力学分析是不够全面的,需要进一步对排肥螺旋进行模态分析,以防止产生共振效应。排肥螺旋六阶模态变形分析云图,如图13所示,六阶模态的固有频率和振幅,见表2所示。

图 13 排肥螺旋六阶模态变形分析云图

表 2 排肥螺旋六阶模态
根据模态分析结果可知:排肥螺旋六阶模态的固有频率都比较高,表明其刚度较大,且基本频率为2997.8 Hz,外界激励的频率远小于排肥螺旋的基本频率,所以不会发生共振破坏现象。
5 结 论
本文在现有小型丘陵山地马铃薯中耕施肥机的基础上设计了一种适合云南省丘陵山地马铃薯种植的精准精量中耕施肥机,施肥机的排肥装置采用垂直螺旋式排肥器,排肥器的螺旋外径为35 mm,螺旋内径为10 mm,螺距为25 mm,螺旋厚度为1 mm,螺旋有效长度为150 mm,螺旋升角为12°,螺旋的极限转速为4.7 r/s。检测控制系统采用STC12C5A60S2单片机作为主控元件,通过接近开关检测判断马铃薯植株的生长位置,并根据当前设定的施肥量精确控制电机转速和启停,实现间歇性精准精量施肥,且施肥量与驱动轮行走速度无关,仅取决于设定的施肥量,并通过静力学和模态分析确保了施肥机满足设计和工作要求,为丘陵山地马铃薯精准精量施肥机的设计提供了参考方案。
[1] 王琳,高立芳,何玮,等.甜高粱套种马铃薯增产又增收[J].草业与畜牧,2015(5):44-45,62
[2] 汪涛,张永华,宁旺云.云南马铃薯机械化生产关键技术探讨[J].湖南农业科学,2013(1):125-128
[3] 宁旺云.云南马铃薯机械化生产现状及发展对策[J].安徽农业科学,2011,39(34):21497-21498
[4] 吴郁青,包丽仙,田志梅,等.马铃薯产业在加快云南省扶贫攻坚中的重要作用探讨[J].云南农业科技,2019(4):20-22
[5] 郭建民.马铃薯全程机械化生产技术要点[J].农业开发与装备,2020(10):203-204
[6] 夏敏,孙鹏,孔皓,等.马铃薯中耕施肥机的设计与试验[J].甘肃农业大学学报,2020,55(3):190-197,205
[7] 孙鹏,孔皓,王源,等.丘陵山地马铃薯中耕施肥机设计与试验研究[J].中国农机化学报,2019,40(9):37-42
[8] 孙鹏,沈鹏,王斌,等.马铃薯中耕施肥机的设计与试验研究[J].农机化研究,2020,42(4):105-108
[9] 孔皓,宁楚峰,张永华,等.单行马铃薯中耕追肥机的设计与试验[J].农机化研究,2022,44(9):74-79
[10] 汪洋,夏志林,何家成,等.垂直螺旋式定量施肥机的设计与试验[J].农机化研究,2018,40(5):88-92
[11] 李洁.有机肥施肥机构设计与试验研究[D].长沙:湖南农业大学,2014
[12] 张周,陈雪,张富贵,等.双料箱施肥机关键部件的设计[J].江苏农业学报,2018,34(1):213-219
[13] 翁玮.1WG-4.1型多功能微型玉米复式作业机的设计及试验[D].南京:南京农业大学,2015
[14] 中国农业机械化科学研究院.农业机械设计手册:上册[M].北京:中国工业出版社,1971
[15] 董俊汶,汪洋,赵进,等.条施机定量施肥控制系统设计[J].西南师范大学学报(自然科学版),2019,44(4):93-99
[16] 陈雄飞,罗锡文,王在满,等.两级螺旋排肥装置的设计与试验[J].农业工程学报,2015,31(3):10-16
[17] 陈广富,徐余伟.陶瓷工业螺旋输送机设计参数的选择和确定[J].陶瓷,2008(11): 47-52
[18] 赵立新,丁筱玲.螺旋输送机的选型设计[J].农机化研究,2006(9):103-105,109
[19] 徐余伟.螺旋输送机设计参数的选择和确定[J].面粉通讯,2008(5):21-24
[20] 李辉,吕晓兰,梅松,等.基于Solidworks的果园施肥机中螺旋投料系统设计[J].江苏农业科学,2017,45(23):214-217
[21] 武福权.垂直螺旋输送机输送过程及计量研究[D].太原:太原科技大学,2019
Design and Simulation Analysis of Medium Tillage Fertilizer Machine for Potato Concentrate in Hilly Mountainous Areas
FANG Xue-feng1, SHEN Peng2, NING Wang-yun1, CHEN Li-chang1*
1.650201,2.210000,
Aiming at the problems of uneven fertilization, inaccurate control of application position and application amount, and low fertilizer utilization rate by existing small-scale hilly and mountainous potato cultivator fertilisers according to the agronomic requirements of potato planting and cultivating fertilization in Yunnan Province, a precision cultivating fertilizing machine suitable for potato planting in hills and mountains of Yunnan Province was designed. The fertilizer spreader includes a walking device, a fertilizer discharging device and a detection and control system. The fertilizer discharge device adopts a vertical spiral fertilizer discharger, the outer diameter of the spiral is 35 mm, the inner diameter of the spiral is 10 mm, the pitch is 25 mm, the thickness of the spiral is 1 mm, the effective length of the spiral is 150 mm, and the limit speed of the spiral is 4.7 r/s. The detection and control system adopts STC12C5A60S2 single-chip microcomputer as the control core, judges the growth position of potato plants through proximity switch detection, and precisely controls the motor speed and start-stop according to the currently set fertilization amount to realize intermittent precision fertilization. Using ANSYS Workbench to conduct static and modal analysis on the three-dimensional solid model of the fertilizer discharge screw, the results show that the basic frequency of the fertilizer discharge screw is 2997.8 Hz, and the maximum stress is 2.9872 MPa, which is far less than its allowable stress, so it meets the design requirements. This study provides a reference scheme for the research and design of precision fertilization equipment for hilly and mountainous potato.
Potato refined sowing; fertilizer distributor; design
S224.21
A
1000-2324(2022)04-0656-09
10.3969/j.issn.1000-2324.2022.04.024
2022-03-11
2022-04-11
云南省重大科技专项计划(2018ZC001-303);云南农业大学科技创新创业行动基金(2022XGKX005)
方雪峰(1998-),男,硕士研究生,研究方向:机械设计与制造. E-mail:977865561@qq.com
Author for correspondence. E-mail:147791610@qq.com
