基于PLC的物料分拣远程监制系统
2022-10-19廖耿斌
廖耿斌
(厦门华厦学院,福建厦门, 360021)
0 引言
随着社会经济不断发展,当前自动化技术已经在现代工业生产中大规模普及。传统的人工分拣存在低效率和漏拣、错拣等问题,基于自动化技术的物料分拣可以有效地避免这些问题。在自动化分拣技术的基础上,通过搭建远程监控系统可以使物料分拣作业更直观更高效地进行[1]。
1 分拣系统总体方案设计
■1.1 网络通讯
国外于九十年代后期开始对对远程监控技术进行研究,由美国斯坦福大学与麻省理工联合举办了第一届基于Internet的远程监控相关会议并建立了Test bed系统[2],为远程监控提供关键性的理论基础。随着工业生产自动化地不断革新,国内外多数生产企业开始在工业生产线上加入网络通信模块来实现生产作业远程监控的新模式。本系统通过工业以太网技术搭建PLC控制系统与PC上位机的物理连接,如图1所示,使用OPC协议技术,将过程控制系统与其数据源的数据交换,最终实现远程实时数据采集。

图1 通讯连接
■1.2 系统结构设计
本系统以物料形状作为分拣基础[3],包括长方形、正方形、圆形三种类型,不同的物料在运输过程中通过视觉检测判断形状[4],并通过称重检测,判断物料是否达到合格重量,不合格将通过气缸推杆剔除,最终将不同的合格物料分拣到相应料库。系统运行过中采用工业机器人实现物料的整体搬运动作,采用步进电机控制传输带进行物料运输。在系统的工作的期间通过对整个控制系统进行区域环境温湿度监控,设定工作环境的温湿度区间范围,并进行实时监测,当超出范围判定异常,报警告知工作人员技术处理。通过远程上位机设定合格重量以及实时监控系统运行状况[5],更迅速更直观的向操作人员展示系统的工作情况。
系统整体结构如图2所示。上位机与PLC通过以太网连接,形成一个小型局域网,能够快速实现数据的传递。输入端包括DI数字信号输入,应用在形状识别,检测到形状后,不同形状将给到PLC不同接口信号;AI模拟信号输入,应用在温湿度采集和称重采集。输出端主要用DO数字信号输出,应用在步进电机控制皮带运输,控制气缸完成“抓”、“吸”、“推”等动作。而工业机器人属于与PLC交互的设备,需要同PLC实现互动,因此需要同时连接双方的输入输出端。
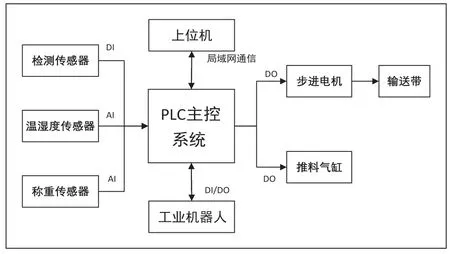
图2 系统整体结构
2 分拣系统硬件组成
■2.1 主控设备
分拣系统的主控设备选择西门子PLC的S7-200 SMART系列,该系列配备以太网口可与与上位机建立局域网,实现远距离通讯。同时S7-200 SMART的编程软件集成了运动控制指令,使步进电机的控制更加简单直接。CPU型号选择ST30标准CPU模块,该模块具备体积小,适合安装在机箱中,不占用空间,控制速度快,操作方便,维修简单等优点,具备18输入/12输出的数字量端口。
CPU接口模块有限,主控设备需添加模块扩展。数字量模块添加西门子S7-200 SMART系列的EM DT32,具备16输入/16输出的数字端口。除数字信号以外,本次设计还需要针对称重,温湿度等模拟信号的采集,模拟量模块选用S7-200 SMART系列的EM AE04,该模块具备4通道的模拟量采集输入,可用于称重信号以及温湿度的读取。
■2.2 工业机器人
采用FANUC公司的LR Mate 200iD /4s型迷你机器人,可在狭小的空间内使用,控制轴数为6轴负责与PLC实现交互工作。如图3所示,事先将工业机器人的不同时间段内的抓取动作分别写入子程序块中,通过工业机器人的DI/DO信号与PLC的数字信号DO/DI连接来实现程序的调用与信号传递[6],最终达到工业机器人与PLC的交互目的。

图3 PLC与机器人交互原理图
■2.3 传感器组件
物料的形状通过机器视觉产品将拍摄目标识别转成对应形状信号,包括长方形、正方形,圆形三种信号。视觉检测包括检测摄像头和视觉控制器以及控制显示屏。如图4所示,通过以太网通讯将显示屏与PLC连接,而摄像头采集到的信号先通过专用相机电缆传送到显示器识别后将检测到的形状后输出对应信号给到控制器,根据事先写好的识别指令,控制器与PLC通过串口连接,将检测到的信号传送给PLC内容输入信号,由控制程序继续执行处理。

图4 PLC与视觉检测通讯原理图
采用应变式称重传感器对物料进行重量采集,通过变送器将传感器输出成标准电流信号4~20mA,再由模拟量模块识别标准电流信号并转化成数字信号,对应参数为6400~32000,通过PLC编程计算转化成称重值,取值范围为0~5kg,计算曲线如图5所示。取得的称重数据可用于识别物料是否合格。

图5 AD转换计算曲线图
温湿度仪器选用泰勒士的壁挂式温湿度变送器,具有性能优越可长期稳定工作。选用TS-FTW15YM带屏显示。温度量程为-20℃~80℃,精度为±0.3℃;湿度量程0~100%RH,精度±3%RH,供电电源为DC12~36V,用来对控制系统的周边环境进行实时检测。
3 分拣系统运行设计
如图6所示,在上位机上设定一个称重值后,按下启动按钮,通过PLC的数字信号输出将连接至机器人对应的输入端口触发子函数A,机器人开始移动到指定物料上方,通过气缸触发抓取动作,实现将物料从初始料库抓取出。

图6 分拣系统运行流程图
取出的物料搬运至称重台后,在子函数A的结尾发出机器人的输出信号,告知PLC可以执行下一个工作,即进行称重检测,当该物料的重量值大于等于设定值,通过PLC内部程序处理,定义为物料合格,同时PLC将会发出一个输出信号将连接至机器人对应的输入端口触发子函数B,等待中的机器人接收到命令后,再次通过气缸抓取将物料抓取搬运至传送带上结束工作的同时触发输出信号给PLC执行下一步指令动作,即接通电机使能和正转,使传送带转动,将合格物料运输至分拣料库附近。
分拣料库包括正方形料库存储、长方形料库存储、圆形料库存储,合格物料存储需要进行分拣。因此物料在运输过程中,经过中间限位时会停下电机2s再继续转动,目的是给予视觉摄像头拍照的时间,将拍到画面在显示屏上显示并识别该物料形状,通过串口连接对应的PLC输入数字端口,不同的形状触发不同的输入端口,以此来执行不同程序。
识别工作结束后,PLC除了内部执行控制程序,在运输物料到达终点限位时,停下运行的电机,还会将识别到的形状信号,通过自身与机器人连接的输出端口发处信号来触发对应的机器人输入端口并调用相应的三个子函数D-F其中一个,执行动作为机器人运动至传送带终点,抓取物料并根据识别到的形状信号而将该物料搬运至相应的物料库中存储,实现分拣作业。
以上为合格物料的工作流程,在称重环节中,当称取的物料小于设定值,将定义为物料不合格,由PLC的输出信号同样会触发机器人的输入端口调用子函数C,此时机器人同样会抓取物料搬运至传送带进行运输。不同的是在经过视觉检测位置时,设定程序为不停下电机来执行拍照触发气缸动作,而是直接运行至传送带终点停下,在传送带的终点有一个出口通道,当不合格物料到达终点后,将触发该位置的推料气缸动作,将不合格物料推出传送带,从出口通道进入到废料区进行集中收集。
当完成一个物料的运输后,PLC将通过料库的位置开关来检测初始料库中是否还有未检测的物料,若存在物料则继续执行以上步骤进行检测与分拣。若未检测到则通过上位机告知操作人员分拣作业完成,设备自动回到原点并停止工作。在整个工作过程中,通过温湿度对控制系统的环境进行实时监测,当出现异常情况,如温度过高的现象,则停止工作并触发警报铃声,上位机上以为出现相应警报弹窗与蜂鸣,以便让操作人员在第一时间得到消息并迅速做出处理,确保设备与人员的安全。
4 远程监控系统搭建
根据系统运行过程中称重设定,运行监控,料库数据查看等功能需求,设计基于IFIX的远程监控系统界面[7]。如图7所示,系统可选取远程控制或者就地控制,当远程远程控制时,便可通过控制面板的启动停止按键控制系统运行。同时系统可实时查看运行情况,当出现报警会立即停止系统并点亮报警指示灯。可通过称重台数据和料库状态查看分拣过程中的物料重量值,判断是否合格,查看各料库储存情况,并对物料合格率进行计算分析。

图7 分拣系统监控界面
远程控制中的信号连接是通过OPC协议技术采集PLC的信号存储于PC中,使用IFIX的OPC Server,如图8所示,选择S7200SMART.OPCServer,使IFIX的数据标签点与PC中的PLC信号对接,最终实现远程监控以及数据采集。

图8 OPC Sever参数设定
5 结语
基于PLC的物料分拣远程监制系统采用PLC作为主控设备,与工业机器人、视觉装置、称重传感器等设备交互配合,通过远程上位机实时监控查看,实现物料运输过程中的分拣与合格筛选。经过测试,该系统通讯快速并且分拣效果良好,达到效率和效益的预期要求。
