基于嵌入式STC12X的无人机动力锂电池实时监测预警设计
2022-10-19聂朝瑞刘晨胡洋李俊超淡可扬
聂朝瑞,刘晨,胡洋,李俊超,淡可扬
(陕西职业技术学院 汽车工程与通用航空学院,陕西西安, 710100)
0 前言
民用和消费领域无人机的动力系统有多种类型,当前民用无人机基本使用单芯或多芯片锂电池,为无人机动力电机、飞行控制系统及机载设备提供能量。无人机系统运行时往往对飞行时间、系统可靠性和机载重量存在均衡的考量,也因此对动力电池的能量密度有着较高的要求。聚合物锂电池拥有优良的放电特性和较高的能量密度,从而使得它成为目前民用和消费领域使用占比最多的电池种类[1~3]。
但聚合物锂电池在具备高能量密度优点的同时也有一定的缺点,多种类型材料的聚合物锂电池对充电和放电电压高低、充电和放电电流大小以及使用环境有着较为苛刻的要求[4,5]。同时,电池的稳定性也存在较大的风险,在受到超过阈值电流设备放电和充电的冲击、环境温度的变化或者剧烈的物理撞击和刺穿下,聚合物锂电池极易出现鼓包、爆裂和剧烈起火现象。因此,使用嵌入式设备对锂电池单芯片进行全生命周期的实时监测就显示的较为重要[6]。研究使用STC12X系列单片机对多芯锂电池进行电池监测,目标是为无人机系统在任务执行和降落后的动力电池的健康状态提供保障。
1 无人机动力锂电池实时监测硬件系统
■1.1 使用STC12X芯片作为主控芯片
研究使用STC12C5A60S2芯片作为主控芯片,其具备增强型的8051内核可以单时钟和机器周期进行运行,运行速度比常规8051快6~12倍,在硬件设计中可以较大地提高系统程序运行速率。芯片内部具备独立8通道的10位高速ADC,运算速度可以达到250kHz,在电池电压的实时监测上可以到达单通道4.8mV的测量精度。
■1.2 使用芯片内置ADC进行多通道电压数据采集
高速STC12C5A60S2芯片内部ADC为8个独立通道,分布在芯片的P10~P17管脚。ADC的分辨率为10位,测量范围限制在0~5V以内。因此芯片内部A/D的理论精度可以达到4.8mV,但在实际的硬件电路测量过程中,可能会有电路上的干扰造成测量电压的不规则跳动,在极限情况下这种跳动有可能会引起程序的错误判断。在片内的程序中将会进行降低误差处理,既芯片的每个通道进行采样10次,对10次内的最大值、最小值和异常数值进行剔除,然后对剩余数值进行平均,将真实数据精度控制在10mV以内,这样采样精度将满足多路电芯的电压监测。

图1 基于STC12X的硬件系统原理图
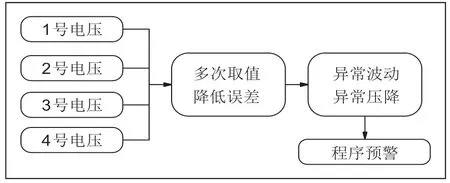
图2 基于STC12X的ADC电压监测原理
■1.3 使用DS18B20进行多通道温度监测
在嵌入式系统中常用DS18B20数字温度传感器进行温度检测。在研究和实验中,为了获取室内温度和电池温度,使用5路独立的通道配置DS18B20数字温度传感器,数字温度传感器组使用统一的稳定电源保证稳定工作。
DS18B20是一种单总线模式的数字温度传感器,具有成本低、体积小、精度高和抗干扰能力强的优点。其最大的特点是外接信号线方便,而且便于进行成组管理。DS18B20温度传感器的测量温度范围在-55℃~127℃之间,其测量精度可以通过读取数据设置为0.5℃、0.25℃、0.125℃或0.0625℃。在聚合物锂电池电芯的温度监测中,使用5路数字温度传感器。其中一路为外部温度获取,其余4路分别对每个电芯进行监测。
■1.4 使用LCD12864作为直接显示设备
在硬件设计和实验调试阶段,为了更加清晰地观察到实时监测电压和温度的连续变化数据,使用了LCD12864液晶显示屏作为实时数据显示设备。LCD12864的硬件配置和连线如图3所示。由于LCD12864使用20针的排插针脚,因此在系统调试稳定后即可手动移除显示设备。

图3 基于STC12X的LCD12864硬件配置和连线图
■1.5 使用高音蜂鸣器作为异常预警提示
设计使用高音量蜂鸣器作为电池电压和温度异常时的提示器件,蜂鸣器使用三极管进行功率驱动,使用STC芯片上的独立I/O口进行程序控制。蜂鸣器在驱动模式上使用中断策略,当系统发现多芯聚合物锂电池电压和温度发生异常变化,则程序以中断方式驱动蜂鸣器发出特殊提示音。
由于芯片单个I/O口在强推挽输出时最大提供20mA的电流,而蜂鸣器的驱动电流为30mA,单片机的I/O口不足以直接驱动蜂鸣器,因此使用Q9013三极管提高电流后对蜂鸣器进行驱动,保证蜂鸣器能够正常运行,如图4所示。

图4 高音量蜂鸣器驱动电路
2 无人机动力锂电池实时监测软件流程
在基于STC12C5A60S2芯片的控制程序中,集成了多种功能程序。如4通道电池电芯电压的采集程序,5通道DS18B20的温度采集程序,LCD12864的图形和文字显示程序以及串口的数据发送程序。而在这些功能程序中,最关键的是电池电压和温度的监测及预警程序。
如图5所示,在软件设计中,为了达到嵌入式系统对电池电芯监测的实时性,内部各个功能程序均已进行了模块化处理,各个功能子程序间相互调用和嵌套,在整个程序中不再设置其他无用的子程序,经过迭代调试,极大地提高了程序执行效率,同时也缩短了电池异常时的预警反应时间。
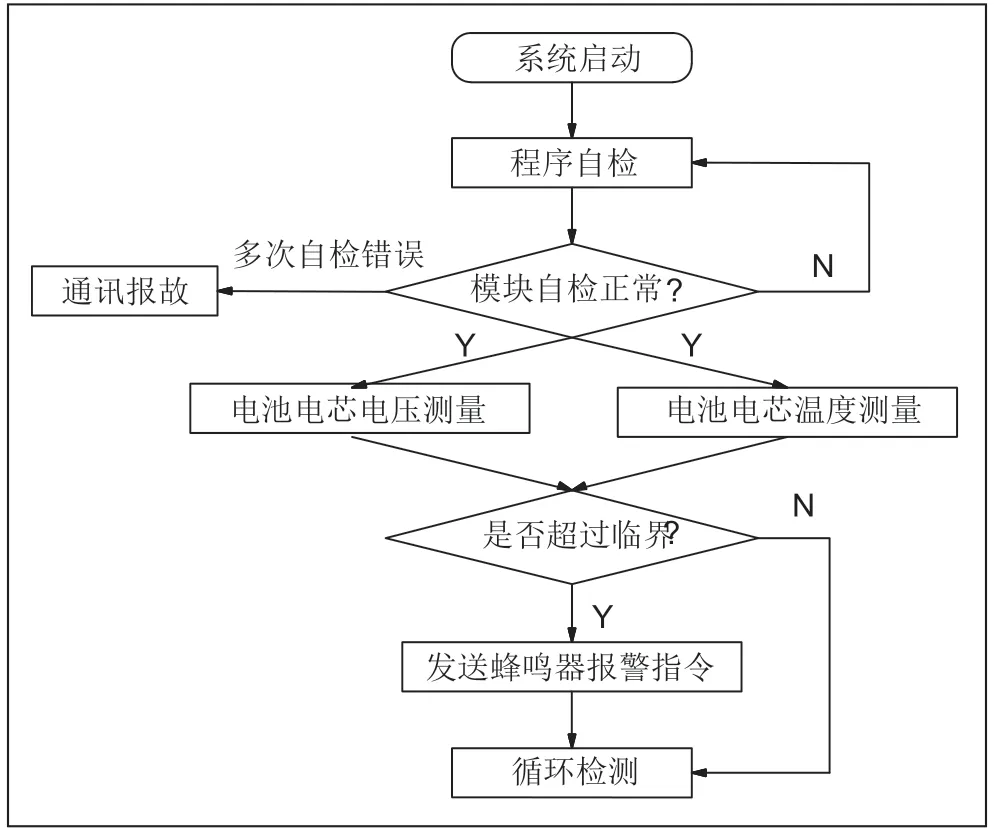
图5 锂电池电芯实时监测预警软件流程图
硬件系统在通电启动后,首先会对单片机自身、ADC模块、DS18B20温度传感器模块进行自检,如果自检程序多次未通过则会引发故障处理子程序,进而激活蜂鸣器向发出故障提示声音。同时通过LCD12864和串口向外显示故障代码,自检程序架构为独立子函数,放置在整体主循环程序的外部。如果各个模块均通过自检程序,则程序开始进行每片电池电芯的电压和温度检测。在检测程序中,根据电压检测程序和温度检测程序的运行时间不同,采用内部中断处理程序的方式进行循环检测。当程序检测到电池电芯的电压发生异常波动或者异常压降,或者电芯温度产生一定差异,则会触发预警子程序。预警子程序驱动蜂鸣器向外发出报警,同时也通过LCD12864和串口向外显示故障代码,此时只有通过手动进行预警解除或者系统程序重置才可以取消报警。
3 电芯实时监测测试实验
■3.1 测试平台
实验使用直流电源设备为电池进行充电,直流电源的电流电压均可根据需要进行调节,电源的输出功率为1kW。电池放电设备为四旋翼无人机上安装螺旋桨负载的无刷电机,型号为2212KV1400,最大输出功率为400W。测试电池对象为两组多旋翼无人机用聚合物锂电池,单芯满电电压4.2V,A组满电容量为2200mAh,B组满电容量为400mAh,A和B电池组均为4块电芯串联模式。选用A和B两个组别的原因是选择一组参照对象进行参考,其中A组电池为正常全新聚合物锂电池,而B组为已经使用了200次以上充电和放电循环的电池组,电池容量已经有所衰减,而且电池外观已经发生较明显的鼓胀。测试平台如图6所示。

图6 无人机动力电池实时监控预警测量平台
■3.2 充电测试实验
由于A组电池为全新锂电池,因此在充电过程中,尝试使用手动充电方式对电芯进行充电。在区域1时,电池的初始电压为3.8V,此时开始准备以恒定电流的方式对电芯进行充电。经过20s左右的电流爬升,充电器电流稳定在5A。在20s到850s的时间内,为恒流快速充电区。由于电芯为2200mAh,并且电芯工艺允许5C快速充电,但考虑到电芯的寿命问题,使用了2.5C的5A充电电流作为最大恒流充电电流。在850s到1100s的时间使用4.2V的恒压保护充电方式,此时充电电流从1C逐步降低到0.1C,最后停止充电。电池电芯从3.8V充电到4.196V的充电电压曲线如图7所示。

图7 A组动力电池充电实时监控测量数据

表1 A组动力电池电芯充电过程监测数据
在整个充电过程中,不论是在区域1的电池充电电流爬升阶段,还是区域2的恒定电流充电区间以及区间3恒压充电区间,电池电压爬升保持了较为稳定的状态,电池的电压和时间变化关系符合健康电池的要素。在变流充电的区域1中的电芯电压变化率为0.025V/10s,恒流充电的区域2中电芯电压的变化率为0.0039V/10s,在恒压充电的区域3中,电池电压变化率为0.00064V/10s。三个区域的电池电压变化率均在锂电池保持正常的充电变化率范围内,此时电池监控预警程序没有预警动作。
■3.3 放电测试实验
使用放电设备对B组1-3号电池电芯进行放电试验,模拟在放电过程中电池电芯出现允许范围内的高倍率放电状况时,实时监测系统对电芯电压异常变化的反应时间和预警效果,放电测试数据见表3。B组电池容量为400mAh,最大可以达到30C的放电倍率,因此最大放电电流可以达到12A。而在放电试验中放电电流为1.5A,放电倍率3.75C,放电电流在电芯额定放电的要求之内。

表3 B组动力电池电芯放电过程测试区域预警动作
在图8中,展示了B组锂电池电芯放电1500s时间内的732个数据点。其中放电区域分为5个区域,在放电区域1中,电池电流开始从0爬升到1.5A,此时电压变化率达到了0.125V/10s超过了程序预设值,蜂鸣器开始进行报警。同样,在放电区域3和放电区域5中,由于电池电芯的原因,放电区域3和5中出现了较大的电压波动,系统同样启动了预警动作。

图8 B组动力电池放电实时监控测量数据

表2 B组动力电池电芯放电过程监测数据
测试区域1、2和3分别为电芯恒流放电的不同阶段进行的电芯预警测试。在3个区域的放电过程中,通过手动方式中止电池电芯的放电状态,3个测试区域的电池电芯的电压回升变化率分别达到了0.33V/s、0.34V/s和0.4V/10s,都触发了电池电芯的报警程序,蜂鸣器发出了提示警报声音。
4 结论
设计通过使用STC12C5A60S2主控芯片,完成了对电池电压和温度的采集和处理,并在电池充电和放电过程中发生异常充放电动作给出了预警和提示。在聚合物锂电池正常充电过程中,对其正常电压变化进行了过滤;在聚合物电池正常放电过程中,系统对发生的异常电压变化给出提示和警告,为无人机系统的动力锂电池的健康使用过程给出了保障。设计为聚合物锂电池在无人机系统中的使用过程中的安全保障策略提供了一些借鉴。
