基于地磁信息的高速自旋飞行体转速测量法*
2022-10-19赵文江刘中戚文昊
赵文江刘 宁*苏 中戚文昊
(1.北京信息科技大学高动态导航技术北京市重点实验室,北京 100192;2.北京信息科技大学现代测控技术教育部重点实验室,北京 100192)
高速自旋飞行体是在飞行过程中绕其中心轴高速旋转的一类飞行体,例如炮弹、火箭弹和自旋导弹等,由于其高速自旋运动能够消除飞行体自身的各种不对称偏差、提高射击精度,因而得到了广泛应用[1]。
高速自旋飞行体的转速测量对其研究具有重要意义。以制导炮弹为例,其转速信息是实现制导与控制的基础,同时其滚转角速率的获取也是其进行滚转姿态角解算的重要条件[2]。在国内外有关转速的研究中,常用的转速测量方法有加速度计法、太阳方位角传感器测试法、星光姿态定位法、高速摄影法、陀螺仪法以及磁通门式地磁姿态测量法[3]。考虑到高速自旋飞行体在转速测量过程中所处的高振动、高冲击等恶劣的测量环境,同时还需满足测试器件体积小、可靠性高的设计要求,故本文选择应用磁阻(MR)传感器技术的地磁传感器法。
目前,磁阻传感器技术已经能够生产出可以安装在高速自旋飞行体上的设备,这些设备不仅满足了小巧、坚固而且灵敏的特点,还能够高速、高分辨率地测量数据[4-5]。与测量转速的传统传感器相比,磁阻传感器具有可无源传感、体积小、可靠性高、灵敏度高、功耗低、成本低等优点,能够实现高速、高分辨率的转速测量[6-7]。
在应用地磁信息推导转速的方法中,利用低成本磁阻传感器进行转速测量的方法虽然能实现转速测量[8],但其方法局限于低转速测量的范围,无法实现变化范围较大的转速测量;中北大学的研究人员[9]提出的基于Hilbert算法的转速信号瞬时频率分析法,属于事后处理方式,在工程实践中难以保证转速测量的实时性;南京理工大学的研究人员[10]提出的用可以在任意角度安装的单轴地磁传感器来测量转速的方法,在高转速情况下,其算法在每个周期采集数据较少,从而导致误差较大;在低转速情况下,其测量原理的不足则会导致解算精度较差。
考虑到各测试方法的不足之处,提出了一种基于地磁时域标量归一信息的转速在线测量方法。通过对飞行体内部地磁传感器获取的地磁信息进行处理计算,从而得出飞行体的实际转速,可稳定地实现对高速自旋飞行体全程转速的有效测量。
1 地磁传感器测量原理
地磁传感器的基本结构是由三个在三维空间中相互正交安装的线圈组成(图1),三个线圈X1、Y1、Z1称为磁感应传感器的敏感轴[11-12]。
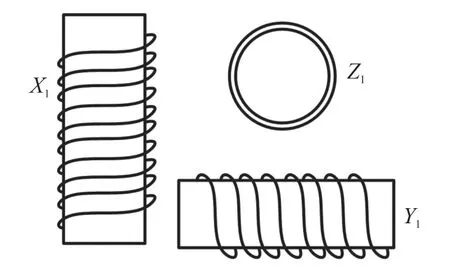
图1 磁感应线圈的分布
飞行体在飞行过程中,敏感轴高速旋转切割磁感线,使传感器磁通量发生变化,导致其内部的地磁传感器受到地磁影响发生周期性变化,从而产生周期性变化的地磁信息[13]。地磁信息的变化反映了高速旋转飞行体在飞行过程中的转速变化过程[14]。
建立如图2所示的东-北-天坐标系,XOY平面平行于大地水平面,三个坐标轴X轴指向东方,Y轴指向北方,Z轴与地表垂直指向空中。假设图2中的地球磁场在地面附近且为均匀磁场,磁感应强度为B,其方向水平向右且平行于OY轴,地磁传感器绕旋转轴旋转的角速度为ω,由电磁感应定律可知,当飞行体在磁场中旋转,其内部地磁传感器切割磁感线产生的磁通量为


图2 地磁传感器工作示意图
产生的感应电动势为

令Em=NBSω,代表地磁传感器线圈平面与磁场方向保持平行时的感应电动势,则

式中:S为线圈面积;B为磁感应强度;N为线圈匝数;ω为飞行体角速度;α为飞行体中心轴与XOY面的夹角;β为飞行体中心轴在XOY面的投影与OY轴的夹角。
由地磁传感器的工作原理可知,其获取的地磁信息的波形是周期性变化的正弦波。归一化后的正弦波所经过的波峰、波谷和零点为正弦波的特征点,通过计算各个特征点的时间差,就可以推导出飞行体的转速[15],最终实现全程转速的测量。
2 转速测量法具体实施步骤
2.1 初始地磁时域标量信息归一化
首先接收初始地磁时域标量数据信息,在接收的数据集合m0中找到首个极大值和首个极小值,并划定初始窗口w0的时间范围为

式中:t0max为数据首个极大值出现的时间点,t0min为首个极小值出现的时间点。由于飞行体在飞行过程中旋转周期会逐渐变大,故在窗口w0时间范围内归一化后的数据曲线中至少包含有两个零点。
然后对窗口w0内数据进行归一化处理。在w0范围内求出地磁信息的最大值w0max、最小值w0min以及平均值w0ave,通过计算得出窗口w0中归一化处理后的数据,得出

其流程图如图3所示,其中m0(i)表示初始地磁时域标量信息m0中第i个数据。
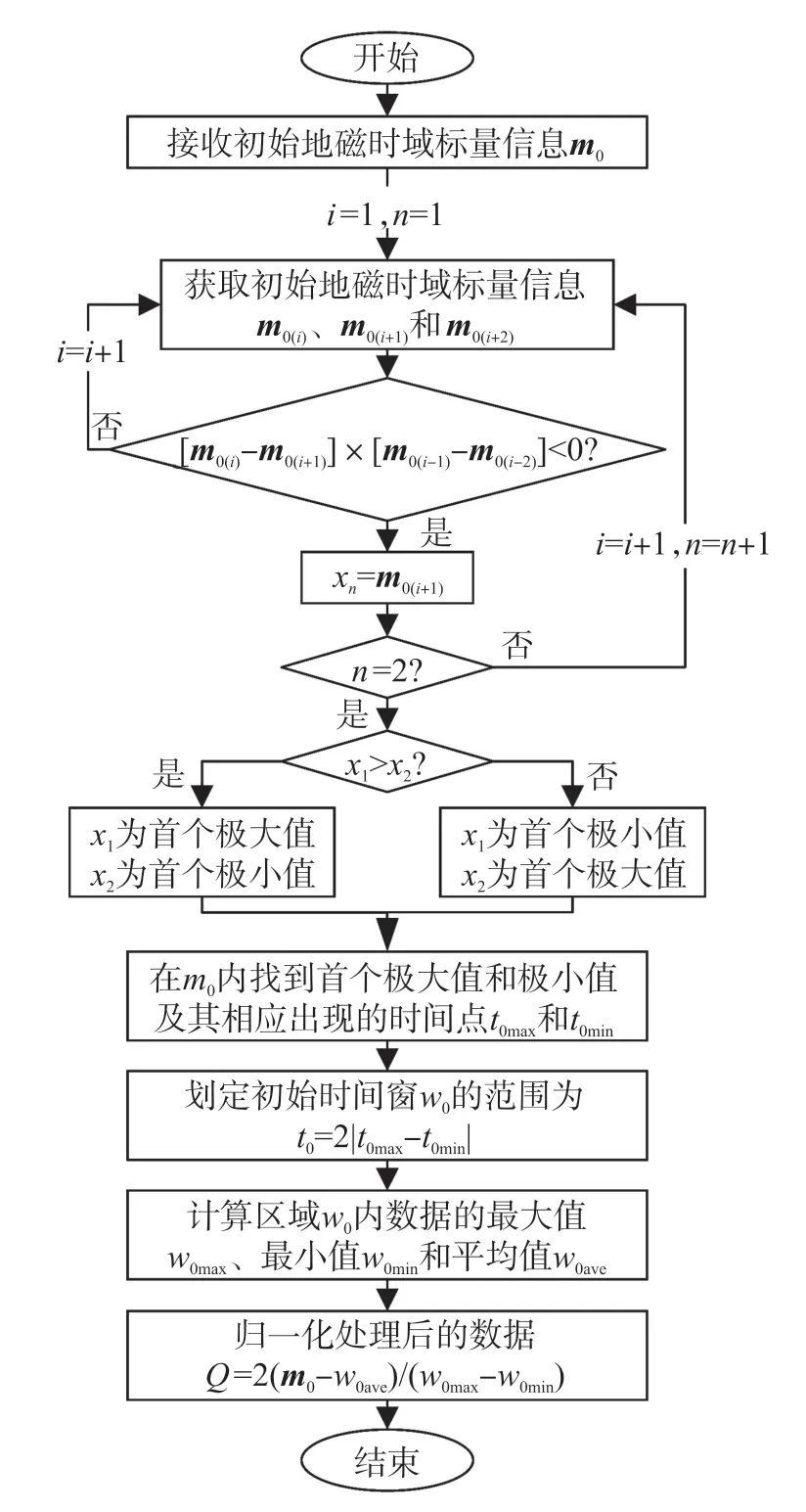
图3 初始地磁时域标量信息归一化流程图
归一化后的地磁信息图如图4所示。

图4 归一化后的地磁信息图
2.2 转速动态测量原理
地磁时域标量归一化后的正弦曲线如图5所示,t0和t1分别为正弦曲线经过特征点的时间点。由于地磁信号的采样频率固定,因此正弦曲线是一条由许多离散点构成的曲线,且每个离散点之间的时间间隔是固定的。考虑到采样到的点不一定是正弦曲线的特征点,而且相较于波峰、波谷附近的特征点,零点附近的特征点更容易被区分,因此选择零点作为数据分析的特征点,从而减小采样所带来的误差,更准确获得高速自旋飞行体的转速。

图5 地磁信号正弦曲线
判断点tn是否为零点的方式为:取tn左侧和右侧的相邻时间间隔采样点的数据值相乘,若得出的结果为负值,则tn为零点。
通过计算窗口wi中图像经过相邻两个零点tin和ti(n+1)所经历的时间,可以得出n时刻正弦波的周期:

弹体转速Rin:

以此类推,即可计算出当前窗口wi内每一时刻的正弦波周期Tin和弹体转速Rin。同时,考虑到零点附近会出现数据波形抖动,从而计算出异常转速值的情况(正常情况下转速区间为-30 r/s至300 r/s),当两个零点距离过近,导致计算结果异常时,则将此组零点删除以达到删除异常值的目的。
由于弹体在飞行过程中转速会逐渐变慢甚至反转,因此将下一窗口wi+1的时间范围设定为λ/Rin(λ取值由试验需求决定),λ为比例系数,即下一窗口wi+1的时间设定范围是当前窗口wi内的最后一组零点所计算出的相应周期的λ倍,以此确保当高速自旋飞行体转速变化范围较大时,在wi+1的时间范围内至少包含有一个正弦周期,从而达到正常计算转速的目的。再对wi+1范围内的数据进行归一化处理,由此得出:

式中:Qi+1为处理后的数据值;mi+1为wi+1范围内数据的原始值;wiave、wimax和wimin分别为wi范围内数据的平均值、极大值和极小值。
即通过wi内最后一组零点计算出的周期Tin和转速Rin来设定wi+1的时间范围,并在wi+1设定的时间范围内用上一窗口内的数据极大值、极小值和平均值对在线接收到的地磁时域标量数据进行动态归一化处理,并计算窗口内每两个零点之间的周期T(i+1)n和转速R(i+1)n,从而达到实时测量转速的要求,同时以窗口内最后一组零点计算得出的周期和转速来设定wi+2的时间范围,依此类推,直至所有数据计算完毕,最终完成基于地磁时域标量归一信息的转速在线测量。转速测量流程图如图6所示。

图6 转速测量流程图
3 试验验证
3.1 地面模拟试验
为验证本文转速测量法的精度,将地磁传感器放置在三维转台上进行精度测量试验(根据本试验需求,λ=3)。在测试时间内,分别对转台设定三组不同的转速值,采集地磁传感器收集的数据。测量模块包含地磁传感器、信号调理电路模块、AD转换电路模块、STM32控制电路模块和储存器模块。
其中,信号调理电路模块的作用是将地磁传感器输出的量程为mV级别的电压信号进行放大处理,从而能够正常进行A/D转换;储存器模块则用于存放采集后的数据,以便后续在上位机中分析使用。转速测量系统框图如图7所示。
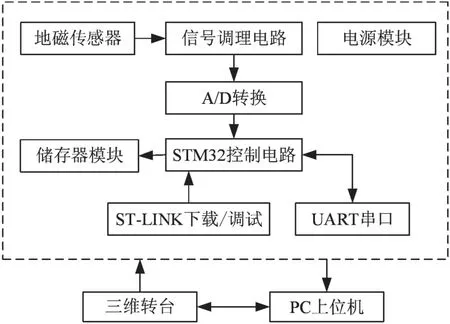
图7 转速测量系统框图
将地磁传感器固定在转台上,设定好转台转速,并启动转台。测试结束后将转台上地磁传感器的测量数据通过本文所述的测量法进行转速计算,并与转台设定值进行比较。测试过程一共为60 s,每经过20 s改变一次转台转速。转速设定值分别设定为5 r/s、10 r/s和20 r/s,通过计算出的转速与设定值之间的对比,即可验证转速测量法的精度。本文所用的地磁传感器和三维转台实物如图8所示。
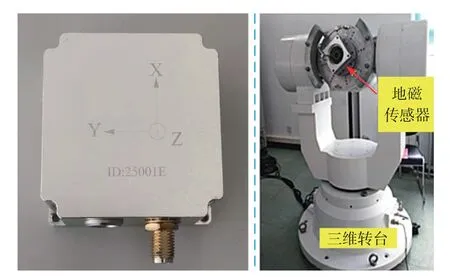
图8 地磁传感器和三维转台实物图
转速设定值与计算结果对比曲线如图9所示,转速精度误差曲线如图10所示。

图9 转速设定值与计算结果对比曲线

图10 转速精度误差曲线
表1给出了A、B两套装置的转速考核数据,为了降低地磁传感器带来的误差,A、B两套装置分别选用了不同型号、相同精度的地磁传感器。在三维转台上分别对每套装置设定了三组转速值:5 r/s、10 r/s、20 r/s,并计算出其中的均方根误差(RMSE)和最大误差。

表1 系统转速测量数据对比
由表1可以看出,这两套装置经过计算得出的转速最大误差在8.2%内,与转台实际转速值基本一致。在低转速时,相较于最大误差超过10%的用可以在任意角度安装的单轴地磁传感器来测量转速的方法,本文提出的转速测量法的精度更高。同时,由于地磁测量结果受装置精度影响,且转台本身也存在一定误差,这些因素都会影响计算结果。因此可以得出,实际转速测量法的误差要低于验证仿真试验的误差。
3.2 实物飞行试验
以某小型高速自旋飞行体为例,其飞行过程中最高转速在100 r/s~200 r/s之间。采集安装有地磁传感器的飞行体飞行数据后,按本文所示方式进行解算,其从发射到落地的部分地磁信息原始测量值如图11所示,转速计算结果如图12所示。由图12可以看出,该小型高速自旋飞行体飞行过程中最大转速为156 r/s,且由最高转速到最低转速的时间为13 s,所得结果基本符合飞行体实际转速值。

图11 高速自旋飞行体部分地磁信息原始值

图12 转速计算结果示意图
4 结论
本文针对高速自旋飞行体转速变化范围大,且难以有效测量的问题,在分析了当前转速测量法的不足和地磁传感器工作原理的基础上,提出了一种基于地磁时域标量归一信息的转速在线测量方法,并通过对算法的测量对照试验的数据分析,验证了本算法精度的可靠性。经过实地飞行体转速测量试验验证,根据试验所获得的实测数据经过计算得出的转速,与飞行体实际转速值误差在8.2%以内,实现了对高速自旋飞行体全程转速的有效测量。
