服务机器人的交互方式对消费者使用意愿的影响研究
——以AI-自我联结为中介
2022-10-18谭诗琪
谭诗琪 吕 巍
(上海交通大学 安泰经济与管理学院,上海 200030)
1 研究假设
1.1 服务机器人的定义
国际标准化组织将智能服务机器人定义为在非结构环境下为人类提供必要服务的多种高技术集成的智能化装备。服务机器人一般由信息传感器和效应器共同构成,其中信息传感器用于实现机器人的智能认知和感知,效应器则是机器人作用于周围环境的手段,信息传感器和效应器是机器人和人、机器人和环境进行交互的基础,人与机器人协作交互的方式包括自然语言、视觉和触觉等。
1.2 交互方式与使用意愿
人机交互方式(Human Robot Interaction, HRI)是指人与机器人之间传递、交换信息的媒介和对话接口。人机交互的表现形式多样,当前广泛运用的是图文点触和语音2种。早期关于交互方式的研究中,国内学者大都聚焦于不同系统交互方式和UI设计对使用意愿的影响。例如潘澜(2016)曾验证用户对于旅游APP的交互感知有用性和满意度的体验会正向影响其使用意愿,而感知易用性和感知趣味性的体验对使用意愿则没有影响。国外学者则从不同角度探讨了交互方式和使用意愿间的关系。首先Garrett(2003)从在线网站的用户体验出发,认为企业可根据用户的潜在交互需求和使用意愿间的关系指导网站交互设计。Thüring和Mahlke(2007)则认为服务机器人的使用意愿可从情感和认知两个层面来归因,认知层面是依赖于系统本身具有的客观特征而产生的,情感层面则主要指个人对系统的情感反应,这两个因素均会具体影响用户的产品使用行为和偏好。同时针对医疗服务机器人和养老机器人的交互方式与使用意愿、治疗意愿的研究也在国外广泛兴起。如Adiba(2012)就语音、点触和眼动等不同的交互方式所产生的使用意愿的差异展开进一步研究,发现语音交互相比于图文点触在一定程度上能增强用户的使用意愿。同时也有一些学者(Hilken T,2020)研究人机交互方式对服务机器人使用意愿的影响,发现在控制显示内容相同时,语音交互时消费者使用服务机器人的意愿更强,因而本文在此提出:
H1:相比图文交互,AI服务机器人采用语音交互时,消费者使用意愿更高。
1.3 AI-自我连结的中介作用
从品牌自我连结推演到AI-自我连结——使用者与AI间建立起的情感连结:在品牌-自我连结的话题下,相关研究(Belk, 1988/2013; Fournier, 1998; Groom, 2009)表明,人倾向于与各种物体建立联系,甚至将自我延伸到各种物体中,例如财产、品牌、自然,甚至是机器人。Gonzalez(2018)等学者的最新研究则认为品牌-自我连结理论可以扩展到服务行业中使用的AI推荐系统和AI服务机器人上,消费者逐步意识到AI系统收集并使用他们的行为数据以提供个性化解决方案,因而与财产和品牌一样,消费者在使用服务机器人的过程中会感知到服务机器人的价值,且AI机器人的行为有可能使消费者将智能机器人视为“虚拟自我”(即认为AI机器人折射了部分的自我形象),这会使得他们与AI的联系更加紧密并与AI系统间建立一种自我联结。Groom等人(2009)将此称为AI-自我连结,并认为与真人员工相比,消费者与智能机器人间可以建立起更紧密的个人联系。同时人机交互的研究者也在不断提供证据证明人可以将物理机器人和虚拟机器人都融入自我概念中。例如,Groom等人(2009)发现,在实验中,当被试自己参与到非人形机器人的制作过程中时,他们会觉得机器人更像自己,并且认为自己亲手制作的机器人与个人之间表现出更多的人格特质重叠。当和与自己相似的机器人互动时,用户会觉得机器人是自己的一部分(Kervenoael R D, 2020)。当使用虚拟机器人时,用户在分享身体和行为相似性(例如身体形象、性别)时,尤其是当这些和机器人接触的方式是与自我更相关的声音和情感时,消费者会感觉更个人化,与机器人之间的情感连结更强(Ducheneaut,2009; Ratan & Dawson, 2016)。总之,过去的发现表明,消费者可以感知到自己与各种对象之间的联系,从使用的品牌到与之交互的物理机器人和虚拟化身。当这些对象反映并代表单个消费者的个人特征和身份时,这种影响就会放大。AI机器人服务时,消费者与AI共享其个人数据,以获得个性化的解决方案和建议,这种行为有可能潜在地使消费者将AI视为“虚拟自我”(即与数字形式某个消费领域有关的自我表示)。为了证明消费者与AI之间可能存在的情感联系,Huang & Philp(2020)的研究中引用了关于品牌关系和人机交互的研究。他们的研究认为相比人工服务,部分消费者可以和AI机器人建立更紧密的个人情感联系并将此称为AI-自我连结。此外当消费者的AI-自我连结更强时,消费者会把发表AI系统相关的负面评价当作描绘负面的自我形象。而消费者通常不愿意负面评价自我,因而相比人工服务,他们更不愿意对AI系统发表负面评价。因而本文在此基础上将AI-自我连结定义为机器人与使用者间建立的一种情感连结,这种情感连结既包括基于AI个性化推荐获得的认知和价值自我构建感及自我映射,也包括使用者将AI机器人当成部分自我而获得的社会性关系。
交互方式通过AI-自我连结影响使用意愿的相关研究:随着AI在服务行业中的广泛应用,消费者与智能机器人的交互成为许多学者的关注焦点,如Eduardo(2015)在酒店环境中对迎宾机器人的使用意愿展开测试,发现提供语音问候的迎宾机器人会显著提高用户的使用时长、参与意愿和舒适性,而使用意愿的提升源自消费者在与AI推荐系统进行交互时,会感觉到自己与AI服务之间的个人联系(即AI-自我连结),并且这种连结可能进一步影响消费者的使用意愿。Caamero(2016)和Thimmesch-Gill(2017)等人进一步提出,在紧急服务和医疗康养等高风险和高压领域,用户对于服务机器人的使用意愿可能与交互方式相关,并且这一过程可能受到用户对机器人的价值感知和情感连结的影响。使用者对于社会情感辅助机器人的不同交互方式接受度不同,对机器人的物理姿势的情感认知更好、接受度更高。这些研究一方面反映了使用者自我构建的过程,即使用者在和机器人交互的过程中不断反映折射个体性和社会性的自我,也是使用者不断感知AI机器人价值、迭代对服务机器人认知,与服务机器人通过交互建立情感连结的过程,这种情感连结即为AI-自我连结。以上的研究证实这种人与机器人之间的情感连结和自我反射会影响到消费者对机器人的使用意愿,并且在用户和机器人交互的过程中,交互方式可能会通过AI-自我连结这一变量来影响用户的使用意愿,因而本文在前人相关研究的基础上提出:
H2:交互方式会通过AI自我连结这一中介变量影响服务机器人的使用意愿。
1.4 使用场景
本文将服务机器人的使用场景归类为公共和私人两种。早前学者的理论研究中认为人在这两种不同的使用场景下和机器人之间可能会建立起不同程度的情感连结,从而引起消费者对服务机器人使用意愿的差异。
Scheeff(2002)探讨了私人和公共环境中的人机交互,发现用户喜欢和社交型服务机器人互动并将其视为一种生物,相比公共场景,儿童在私人场景中对机器人的使用意愿更高。Weiss(2008)研究了从私人场景转移到公共场景时,用户对于服务机器人的社会接受度在一定程度上会减少,并提出了人机交互接受度的测量方法。Pieska(2012)在设计服务机器人时,进一步提出要对公共和私人使用环境中的机器人做差异化的交互设计以迎合不同消费者的使用需要,并认为在公共(博览会、餐饮)和私人场景(家庭老人用)下消费者与机器人间将产生不同的情感连结,这种情感连结将会影响消费者的使用。Ahn等(2015)认为老年人对于私人和公共场景下服务机器人的使用意愿有不同的偏好。在此研究之上本文基于前人的分类,选取酒店大堂和购物广场场景作为典型的公共使用场景,选取酒店客房和家居场景作为典型的私人使用场景并做出如下假设:
H3:使用场景会调节人机交互方式对使用意愿的影响。
H3a:在私人使用场景中,人机交互对消费者的使用意愿影响作用会被增强。
H3b:在公共使用场景中,人机交互方式使用的影响作用会被减弱。
1.5 感知到的智能化程度
1.5.1服务机器人智能化程度的定义
总结前人研究,可从2个不同的视角来定义服务机器人的智能化程度。首先,从服务机器人本身出发,服务机器人的智能化程度可定义为在服务场景下机器人获取顾客的消费行为和历史数据,并通过算法和程序处理这些信息指导机器人做出决策形成判断的服务能力,这些判断和决策越准确、速度越快,意味着机器人的智能化程度越高。其次,从消费者感知的视角出发,则可依据Bartneck定义的5个维度来测量服务机器人的智能化程度,消费者在这5个维度上的感知越高,代表服务机器人智能化的程度越高,反之则越弱。由于本文的研究对象是机器人的智能化程度与消费意愿间的关系,故选取Bartneck的测量方法来确定消费者对服务机器人智能化程度的感知更为准确,且前人使用基于该问卷的几项实证研究已验证该调查问卷的信度和效度指标的可靠性,在本文中同样使用李克特7级语义差异量表设计问卷来测量消费者感知到的机器人的智能化程度。
1.5.2感知的智能化程度和消费意愿间的关系
服务机器人通过AI-自我连结影响消费者的消费意愿:随着大数据、云计算和深度学习技术的演进,越来越多的AI算法可以针对音乐、电影、美食甚至金融服务等提供个性化推荐。Lu(2019)通过分析4个具有代表性的服务行业(航空、酒店、餐饮和零售)发现,消费者对服务机器人的使用意愿会随机器人智能化程度和推荐精准度的增加而增加。Hildebrand等(2019)验证了相比于自行浏览网页,消费者更愿意与服务机器人交流,并在聊天机器人的推荐下消费。同时也有学者就现代服务业中AI推荐服务未能提供令人满意的结果时消费者将如何做出响应进行了研究。Huang等(2020)提出在酒店业中,服务机器人和消费者间存在着AI-自我连结,AI会反映折射人的自我性和社会性,因而在服务失败时,相比真人,AI-自我连结更强的消费者基于自我保护机制,更不愿意向机器人发表负面评价。Qiu(2019)认为拟人化或机器人的智能化程度对顾客-机器人融洽关系构建和顾客款待体验会产生积极影响。Mende(2019)认为餐饮服务机器人的外形会影响顾客对于食物的消耗等。舒伯阳(2020)认为服务机器人通过提升服务和营造愉悦氛围两条路径改善顾客体验。因而本文在前人研究的基础上提出以下假设:
H4:感知到的机器人智能化程度会调节人机交互方式对使用意愿的影响。
H4a:消费者感知到的智能化程度高,人机交互对消费者使用意愿的影响作用越强,即智能化程度高能增强交互方式对消费意愿的影响。
H4b:消费者感知到的智能化程度越低时,人机交互对消费者的使用意愿影响越弱。
综上,形成研究框架见图1。
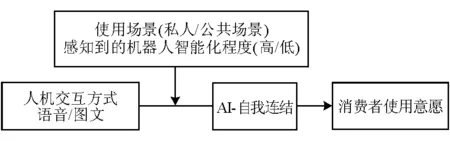
图1 研究框架
2 研究设计
2.1 前测:检验不同场景下感知的智能化程度,确定实验刺激物
前测主要是为了检验2个不同场景下消费者感知的服务机器人智能化程度的高低,确定高/低智能化程度的刺激物。设定在酒店机器人服务场景中,让2组被试分别经历语音/图文交互的服务过程并在观看阅读图文后完成关于机器人智能化程度感知的问卷调查。
2.2 实验一:验证交互方式对消费意愿的影响机制及AI-自我连结的中介作用
根据交互方式的不同将被试分为两组(语音vs图文),告知被试需要完成一个关于服务机器人体验满意度的调查,需要在系统中模拟体验服务机器人的服务后并填写问卷。被试首先会被要求观看关于AI服务机器人在私人场景下,在语音/图文交互方式下接受服务的说明并想象服务场景,然后对感知到的AI服务机器人智能化程度进行打分,之后会跳转到需要被试填写AI-自我连结、使用意愿的问卷,最后被试需要填写个人信息项,主要包括性别、年龄、受教育水平等。
2.3 实验二:验证使用场景的调节作用
由于使用场景和被感知的智能化程度间并没有显著的交互作用,因而实验二使用高智能化程度的机器人,并采用交互方式(语音vs图文)×使用场景(私人vs公共)的2×2组间实验验证使用场景的调节作用。告知被试需要完成一个关于服务机器人体验满意度的调查,需要在系统中模拟体验服务机器人的服务后并填写问卷。被试首先会被要求观看一个高智能化程度AI服务机器人在私人或公共场景下,在语音或图文交互方式下接受服务的说明并想象服务场景,然后需要对感知到的AI服务机器人智能化程度进行打分,之后会跳转到需要被试填写AI-自我连结、使用意愿的问卷,最后被试需要填写个人信息项,主要包括性别、年龄、受教育水平等。
2.4 实验三:验证感知到的智能化程度的调节作用
由于使用场景和被感知的智能化程度间并没有显著的交互作用,因而本次实验选用私人使用场景,并采用交互方式(语音vs图文)×被感知到的智能化程度(高vs低)的2×2组间实验验证感知的智能化程度的调节作用。告知被试需要完成一个关于服务机器人体验满意度的调查,需要在系统中模拟体验服务机器人的服务后并填写问卷。被试首先会被要求观看一个高/低智能化程度AI服务机器人在私人场景下,在语音或图文交互方式下接受服务的说明并想象服务场景,然后需要对感知到的AI服务机器人智能化程度进行打分,之后会跳转到需要被试填写AI-自我连结、使用意愿的问卷,最后被试需要填写个人信息项,主要包括性别、年龄、受教育水平等。
2.5 实验变量及其测量
本研究主要采用给被试观看图文说明结合场景想象的形式来测量消费者的AI-自我连结、使用意愿、感知到的智能水平。在实验开始前根据相关文献对私人场景和公共场景做出了界定,并通过前测操控实验对消费者感知到的智能化程度进行界定,采用Bartneck(2008)关于机器人智能化程度的量表,关于AI-自我连结的量表采用了Tan等(2018)测量Self-AI connection的量表,关于使用意愿的测量则改用了Dodds等(1991)、Kim等(2008)和Pham等(2015)的量表,以上量表均经过信度效度检验,并采用李克特7级量表测量。
3 研究结果
3.1 描述性统计
为完成实验设计共收集问卷343份,其中有效问卷336份。问卷大部分来源于问卷星付费问卷,小部分来源于笔者手动征集。将被试人群随机分为8个实验组接受问卷调查,其中男性占比39%、女性占比61%;大部分被试年龄集中在18~35岁,占比74%;有289个被试(86%)受过本科及以上的教育,且大部分受访者生活在高线城市,一线及新一线受访者数量为219名,占比65%;大部分被试家庭年收入集中在20万~100万,中收入人群数量为234个,占比70%。
3.2 前测结果
前测结果表明高智能化程度组感知到的智能化程度Sa=5.9296,低智能化程度组感知到的智能化程度Sb=2.555,均值差为3.37371,两者间存在显著差异(t=26.688,p=0.000<0.05),说明实验成功操纵了消费者对AI服务机器人智能化程度的感知。
3.3 实验一结果
在前测操纵变量成功的基础上,对使用意愿采用单变量方差分析和Process Model 4、Bootstrap法来分别检验主效应和AI-自我连结的中介效应。结果显示,交互方式对使用意愿的影响显著。具体而言,即交互方式对使用意愿有影响,消费者在语音交互时,使用意愿越高(M=5.9405,F(1, 82)=120.294,p<0.000),同时回归系数a(X对M)=2.9762,显著(p<0.01),95%CI(2.4176,3.4821),说明自变量交互方式对中介变量AI-自我连结有正向相关作用,假设1和假设2得到验证。
3.4 实验二结果
使用Process Model 8来检验使用场景在交互方式和AI-自我连结中的调节作用,实验结果有效验证了本文的假设H1、H2和部分的H3,即机器人的交互方式会影响消费者的使用意愿,并且在语音交互方式下的使用意愿强于图文交互。在此过程中,使用场景是一个显著的调节变量。与本文假设不符的是,公共使用场景并未负向作用于主效应,无论是私人场景还是公共场景都能够正向增强消费者与服务机器人间的AI自我连结程度,从而正向影响使用意愿,但私人场景下的调节程度比公共场景下更高。即在语音交互方式下,私人场景下的使用意愿会高于公共场景,图文场景下反之。
以使用意愿(因变量)作为结果变量的模型检验,如图2。可以看到当使用意愿作为结果变量时,模型的R值为0.9140,整后的R方为0.8350,p<0.01,说明模型有统计学意义。回归系数c3(X*W,Int_1对Y)=1.1490,显著(p=0.000<0.01),95%CI(0.6520,1.6460),说明使用场景作为调节变量对主效应的正向调节作用显著,回归系数c2(W对Y的直接作用)=0.1920,显著(p=0.000<0.01),95%CI(0.0340,0.4290),说明使用场景作为调节变量对主效应有正向的调节作用。同时偏回归系数b(M对Y的直接作用)=0.2940,显著(p=0.0020<0.01),95%CI(0.1140,0.4740);偏回归系数c1(X对Y的直接作用)=1.7370,显著(p=0.0000<0.01),95%CI(1.0500, 2.4240)。a、b、c1、c2、c3等间接效应值的95%区间(BootCI)值不包括数字0,则说明调节效应成立,且主效应成立,从而有效验证了本文的假设H1、H2和部分的H3。
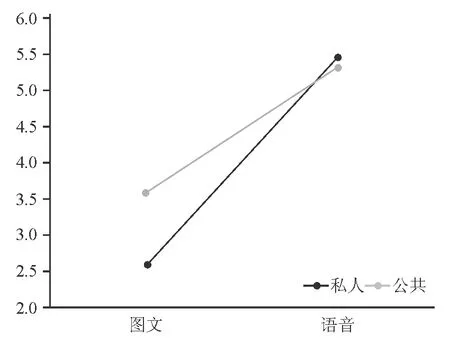
图2 关系图
3.5 实验三结果
实验三与实验二原理基本一致,同样使用Process Model 8来检验消费者感知到的服务机器人的智能化程度在交互方式和AI-自我连结中的调节作用,实验结果有效验证了本文的假设H1、H2和部分的H4,即感知到的智能化程度会通过AI-自我连结正向调节交互方式对使用意愿的影响,且用户感知的智能化程度越高,这种正向调节效应更大。与本文假设不符的是,当用户感知的智能化程度低时,智能化程度也并未负向作用于主效应,无论是何种智能化程度都能够正向增强消费者与服务机器人间的AI自我连结程度,从而正向影响使用意愿,但高智能化程度的调节比低智能化程度更高。
以使用意愿(因变量)作为结果变量的模型检验,如图3。可以看到当使用意愿作为结果变量时,模型的R值为0.9120,整后的R方为0.8320,p<0.01,说明模型有统计学意义。回归系数c3(X*W,Int_1对Y)=0.2850,显著(p=0.000<0.01),95%CI(0.1340,0.4360),说明消费者感知到的服务机器人的智能化程度作为调节变量对主效应的调节作用显著。回归系数c2(W对Y的直接作用)=0.3610,显著(p=0.000<0.01),95%CI(0.2140,0.5180),说明消费者感知到的服务机器人的智能化程度作为调节变量对主效应有正向的调节作用。同时偏回归系数b(M对Y的直接作用)=0.6440,显著(p=0.0000<0.01),95%CI(0.5300,0.7490);偏回归系数c1(X对Y的直接作用)=1.1770,显著(p=0.0000<0.01),95%CI(0.7700, 1.6100)。a、b、c1、c2、c3等间接效应值的95%区间(BootCI)值不包括数字0,则说明感知到的智能化程度在主效应中的调节效应成立,且主效应成立,从而有效验证了本文的假设H1、H2和部分的H4。
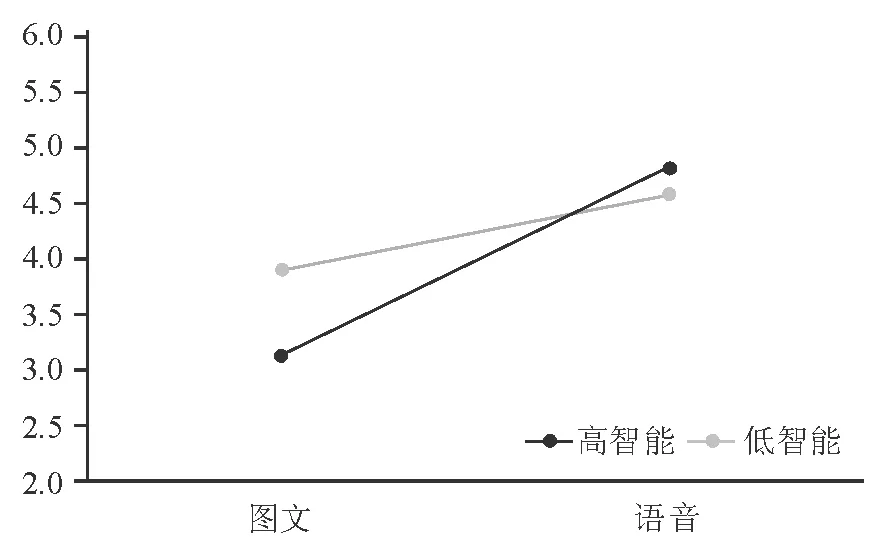
图3 关系图
4 结论
4.1 研究结论
本研究的假设均通过3个实验得到完全或部分证实。首先,交互方式通过AI-自我连结这一中介变量显著正向影响消费者的使用意愿。其次,使用场景和感知到的智能化程度对使用意愿均有显著影响。私人/公共使用场景正向调节交互方式对使用意愿的影响,私人场景下调节效应更强。消费者感知的服务机器人智能化程度也显著正向调节交互方式对使用意愿的影响,在高智能化程度下调节效应更强。
4.2 管理启示
服务机器人设计中应注重交互方式:在服务机器人的选择和使用过程中,除普遍受到学术界关注的外形设计外,也应注重交互方式设计,单一、卡顿、非智能的交互体验是阻碍消费者使用服务机器人的重要原因。同时企业在不同使用场景中,应注意不同的交互方式可能对消费意愿产生的潜在差别,灵活选用语音或图文点触交互方式。
未来可针对机器人的智能化程度和使用场景进行差异化的交互方式设计:
(1)针对不同智能化程度的机器人:对于高智能化程度的机器人,选用语音交互方式能更大程度激发消费者的使用动机,提高消费者的使用意愿,而对于低智能化程度的机器人,则不同的交互方式对使用意愿的影响差异并没有高智能化程度的服务机器人大。
(2)针对不同类型的使用场景:在私人化的场景中,采用语音交互方式更能激发消费者的使用意愿,而公共场景下语音和图文交互对使用意愿的影响则不如私人场景下显著。
4.3 研究创新与贡献
选取AI-自我连结作为中介变量:过往文献大部分聚焦于服务机器人的拟人化外形对消费者行为带来的影响,对交互方式的研究较少,尤其是对语音和图文交互的系统化研究。本文结合国外AI与营销顶级刊物上的前沿研究,创新性引入AI-自我连结作为中介变量,研究交互方式对使用意愿的影响,是对AI服务机器人的系统性研究。
综合考虑了使用场景和个体智能化程度感知对使用意愿的影响:随着AI应用范围的不断扩展,越来越多的因素会在这个过程中影响消费者的使用意愿。企业致力于为消费者提供智能水平越来越高的AI服务机器人,而不同服务场景以及消费者的个体感知因素如何影响其对AI产品的使用还需要进一步检验。因此,本研究对不同的使用场景和感知到的服务机器人的智能化程度对消费者使用意愿的影响研究将拓展对人工智能产品使用行为的认知,丰富目前文献。
4.4 研究局限
虽文献梳理和实验过程中力求严谨,但本研究仍存在不足。首先,研究对象及其操纵方式有待完善,在3个主实验中采取了让被试观看图文说明及场景想象的方式操纵,未检验用户和AI服务机器人的真实互动场景,未将图文和语音交互进行组合实验。其次,在选择自变量交互方式时,仅选择了2种最主流的方式即语音和图文点触进行研究,未考虑语音和图文点触交互方式中同样存在多种交互子类,未来可结合语音声音类型、图文点触位置、服务内容等多种因素的影响进行细化研究。
