基于运动性能分析的仿人机械臂尺度优化
2022-10-18李研彪单晓杭韦宝琛
孙 鹏 李研彪 张 聪 单晓杭 岳 义 韦宝琛
1.浙江工业大学机械工程学院,杭州,3100232.上海工程技术大学机械与汽车工程学院,上海,201620
0 引言
目前,多关节串联机械臂的研究热点聚焦于轨迹规划[1-2]和柔顺控制[3-4]等方面,这拓展了多关节串联机械臂在人机共融领域的应用,但仍受到串联机构固有特性的限制。并联机构虽然有效地弥补了这种缺陷,但也存在工作空间小和运动耦合等缺点[5]。而将串联、并联机构组合而成的混联机构作为结构本体,则巧妙地结合二者的优点[6-7],通过合理布局可获得良好的运动性能。因此,混联机构的构型合成[8-9]和性能优化[10-11]引起了研究人员的极大兴趣。
综合来讲,串并混联机构主要有三种类型:并联-串联[12-13]、串联-并联[14-15]、并联-串联-并联[16-17]。并联-串联构型的混联机构主要应用于机床领域,其中以五自由度混联机床的应用最为成熟。并联机构可为末端执行器提供较大负载,并且一定程度上满足工作空间的需求。串联-并联构型的混联机构主要应用于外科手术和大曲面抛光领域,串联机构能够提供足够大的工作空间并且运动灵活性高,末端的并联机构则具有精细的姿态调整功能,更适用于要求精细化操作的外科手术领域和连续曲率变化的曲面抛光领域。并联-串联-并联构型兼顾了上述两种构型的优点,既满足了末端执行位置和姿态空间的要求,也能提高机构整体的负载惯性比。这类构型的机构功能划分与人体手臂相类似,可被应用于仿人机械臂领域[6],但它存在工作空间复杂以及性能指标定义不清晰等不足。
尺度优化是机构学理论的一个重要课题,它主要涉及两个关键问题:优化目标函数的确定和优化方法的选择。对于优化目标,串联机构主要根据雅可比矩阵条件数等[18]进行优化;并联机构主要考虑输入与输出的运动/力的传递效率[19];混联机构的性能优化要综合考虑末端执行器的运动特点,分别建立相应传递性能指标。优化设计方法主要分为两类,一种是应用智能算法[20-22],另一种是构造参数的尺寸空间[23]。智能算法主要解决具有实时性要求的优化问题,只能给出解集,不能反映参数与指标之间的复杂关系,并且初值选取与参数设置对智能算法的收敛性和运行效果产生较大影响。尺寸空间是最早被采用的设计方法,该方法兼顾各项指标又能保证各项指标之间的相互独立,但它不适合处理多目标和多参数的设计。因此,设计一种三维可视化的尺寸空间,直接展示性能指标与结构参数间的映射关系是一项具有意义的研究。
本文基于上述分析,根据仿人机械臂的运动特性,分离设定了各关节的性能指标,提出了一种多参数平面模型技术,实现了三维可视化优化设计。在此基础上,完成了仿人机械臂的结构参数优化工作,并确定了相应的关节姿态空间与指标分布情况。
1 仿人机械臂描述
1.1 构型布局
仿人机械臂的三维模型和机构原理图见图1,肩关节以2个转动自由度的球面5R并联机构为原型,其两条运动链分别由转动副A1、B1、C1与A2、C2构成。肘关节为三自由度的RRR串联机构,由转动副D、E、F组成。腕关节采用3个转动自由度的对称型球面3-RRP并联机构,其3条运动链分别由转动副Hj、Kj和移动副Pj构成(j=1,2,3)。静坐标系OXYZ以点O为中心,点O为肩关节的转动中心,轴Y与轴OA2重合;坐标系OX1Y1Z1是肩关节的动参考系,轴X1与轴OC2重合,轴Z1与轴OC1重合;坐标系O2X2Y2Z2是肘关节的动参考系,点O2为转动副的轴线交点,轴Z2与轴O2D重合;坐标系O3X3Y3Z3是腕关节的定参考系,O3为转动副轴线与移动副法线的公共交点,轴Z3与轴O2F重合。坐标系O4X4Y4Z4为末端动参考系(点O4与O3重合)。初始位姿时,各动坐标系的轴线与静坐标系的轴线平行。

(a)三维模型
针对各关节的构型布局,定义相关结构参数,并根据结构紧凑性与协调性的设计经验设定各个参数的取值范围,如表1所示。
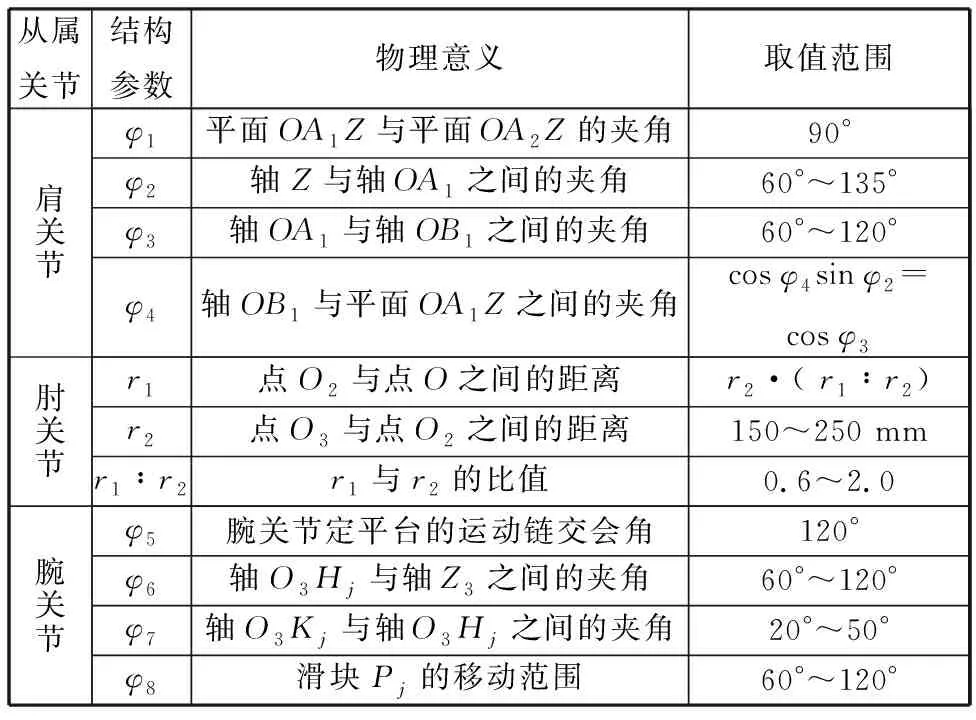
表1 仿人机械臂的结构参数
1.2 运动特性简述
在以往的工作中,该仿人机械臂的运动学求解方法已经被提出[6],为性能指标的设定提供了基础。基于旋量理论与指数积公式,该仿人机械臂的相关运动学解析式为
(1)
(2)

通过分析式(1)和式(2)可得,肩关节和肘关节(不包含转动副F)确定了末端平台参考点O4的位置空间,并为末端平台提供了寄生姿态。驱动副F和腕关节决定了末端平台的主动姿态空间。
2 性能指标设定
针对仿人机械臂各关节的主要功能,分别对肩关节、肘关节、腕关节的运动学性能进行分析。其中,基于能效系数建立从属于并联机构的肩关节与腕关节的传递/约束指标;基于雅可比矩阵的条件数建立肘关节的线速度性能指标。
2.1 能效系数
对于并联机构,根据旋量理论,力旋量与运动旋量的互易积表示力旋量对按此运动旋量进行运动的刚体所做功的瞬时功率,并且其最大值作为视在功率。将实际功率与视在功率的比值作为能效系数,能效系数越大,表示能量传递效率越好。因此,可得输入与输出的传递能效系数[19]为
(3)
(4)
式中,ξT为传递力旋量;ξI为输入运动旋量;ξO为输出运动旋量;λI为输入传递能效系数;λO为输出传递能效系数。
输入与输出的约束能效系数[19]为
(5)
(6)
式中,ξC为约束力旋量;ξR为受限运动旋量;ΔξO为输出受限运动旋量;кI为输入约束能效系数;кO为输出约束能效系数。
一般情况下,上述4组能效系数的最小值为该并联机构的整体性能指标:
Υ=min(λI,λO,κI,κO)
(7)
2.2 肩关节的性能指标
(8)
式中,c、s分别为cos、sin的缩写。

(9)
(a,b,c)=(RSJSB1)×(RSJSC1)
式中,SB1为初始位姿下转动副B1的轴线矢量坐标;SC1为初始位姿下转动副C1的轴线矢量坐标;RSJ为肩关节的姿态转换矩阵(Z-Y-X型欧拉角描述)。

(10)
(cβ1,0,-sβ1)=RSC2
(d,e,f)=(sβ1,0,cβ1)×(a,b,c)
式中,SC2为初始位姿下转动副C2的轴线矢量坐标。
(11)

(12)

(13)
(c,0,-a)=(0,1,0)×(a,b,c)

(14)
2.3 腕关节的性能指标

(15)
其中,每个输入运动旋量的前三维坐标为该输入转动副的轴线矢量坐标SH1、SH2、SH3。
(16)
(a1,b1,c1)=(RWJSK1)×(RWJSP1)
(a2,b2,c2)=(RWJSK2)×(RWJSP2)
(a3,b3,c3)=(RWJSK3)×(RWJSP3)
式中,SK1为初始位姿下转动副K1的轴线矢量坐标;SP1为初始位姿下移动副P1圆弧轨迹的轴线矢量坐标;SK2为初始位姿下转动副K2的轴线矢量坐标;SP2为初始位姿下移动副P2圆弧轨迹的轴线矢量坐标;SK3为初始位姿下转动副K3的轴线矢量坐标;SP3为初始位姿下移动副P3圆弧轨迹的轴线矢量坐标;RWJ为腕关节的姿态转换矩阵(tilt-and-torsion angles描述)。
(17)
(d1,e1,f1)=(a2,b2,c2)×(a3,b3,c3)
(d2,e2,f2)=(a3,b3,c3)×(a1,b1,c1)
(d3,e3,f3)=(a1,b1,c1)×(a2,b2,c2)
(18)
(19)
(20)

(21)
2.4 肘关节的性能指标
在物体坐标系(O4X4Y4Z4)中建立末端参考点的线速度雅可比矩阵:
(22)
采用雅可比矩阵条件数的倒数为性能指标,它为最小奇异值与最大奇异值之比,反映末端平台的速度大小对关节速度的敏感度:
(23)
式中,Kv为线速度性能指标;σmin为最小奇异值;σmax为最大奇异值。
由式(22)可知,肩关节的等效转角β1不影响矩阵4Jv取值;当cθγ1= cθD= 0 或sθE=0 时,矩阵4Jv的秩由3变为2,末端参考点失去沿物体坐标系Z4轴的线速度。
3 参数优化
结构参数优化对机构各运动关节的布局起到关键作用,对机器人的性能尤为重要。本文将指定工作空间下的性能指标均值作为全域性能指标,并根据各关节的性能分析,基于多参数平面模型,实现了各关节的结构参数优化。
3.1 多参数平面模型
针对多参数可视化优化设计,提出了一种多参数平面模型。多参数平面模型原理为参数的组合排序,具体做法如下:假设有l个参数,每个参数取k个采样点,取任意两个参数构成方形散点图;方形的每个交点代表一个组合,这些交点被映射在一条对角线上;这些对角线也按照上述方法形成一个新的正方形(或长方形)散点图,以获得新的对角线。重复此步骤,直到得到最后一个正方形(或长方形)散点图,其交点包含所有参数的组合。注意,长方形散点图是由l为奇数引起的。以a、b、c、e4个参数为例展示模型,每个参数取相同数量的采样点al、bl、cl、dl(l=1,2),如图2所示。
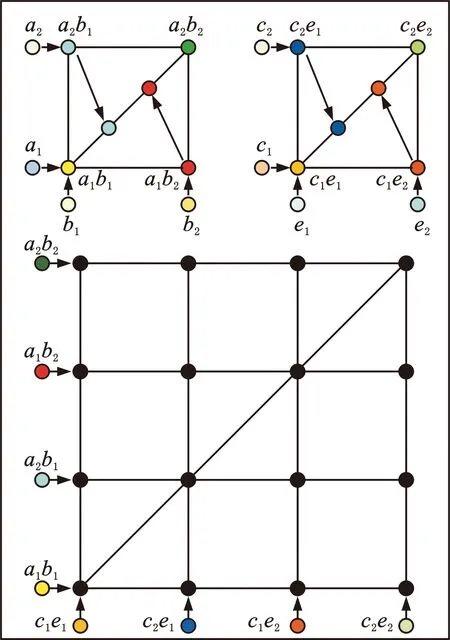
图2 多参数平面模型Fig.2 Multi-parameter plane model
3.2 肩关节优化设计
设定肩关节的姿态搜索空间:β1∈[-160°, 40°],γ1∈[-160°,40°]。肩关节的结构参数取值范围如表1所示。基于多参数平面模型建立肩关节全域性能指标,如图3所示。

图3 肩关节全域性能Fig.3 Global performance of shoulder joint
整体上看,全域性能指标随φ2增大而减低;随φ3增大呈现出先增大后减小的趋势,并在φ3∈[70°, 80°]时取较大值;φ2与φ3差值较小时,指标值相对较高。为进一步分析参数对性能的影响,取9组[φ2,φ3]的参数组合:[60°,75°]、[90°,75°]、[120°,75°]、[60°,90°]、[90°,90°]、[120°,90°]、[60°,105°]、[90°,105°]、[120°,105°],各组参数下的肩关节性能表现如图4所示。
图4中的空白部分表示肩关节的运动性能指标值小于0.5,当肩关节位姿处于此区域时传递与约束性能较差,并且此区域的对称线为肩关节的奇异位姿。由图4可知,φ2的取值影响肩关节奇异位姿在工作空间中的位置。在β1∈[-160°,40°]、γ1∈[-160°,40°]搜索空间范围内,当β1=-φ2或β1-φ2= 180°时,肩关节奇异,这造成全域性能随φ2值增大而降低。φ3的取值影响肩关节运动性能于奇异位姿附近的取值,当φ3>75°时,运动性能指标值小于0.5的范围随φ3值增大而扩展,从而造成全域性能降低。上述分析符合图3表现出的全域性能变化趋势。

(a)φ2 = 60°,φ3= 75° (b)φ2 = 60°,φ3= 90° (c)φ2 = 60°,φ3= 105°
3.3 腕关节优化设计
采用tilt-and-torsion angles方法描述腕关节的全姿态空间,并设定搜索范围:φ∈[-180°,180°],θ∈[0°,90°],ψ∈[-180°,180°]。腕关节的结构参数取值范围如表1所示,参数φ6、φ7与φ8分别取25、7与13个采样点,则共有2275种参数组合,建立平面模型如图5所示。基于多参数平面模型建立腕关节全域性能指标,如图6所示。在全姿态搜索空间下,腕关节的姿态空间大小也对其全域性能取值产生影响,因此图7以搜索点数目展示了不同参数组合下的腕关节姿态空间。

图5 腕关节全域性能参数φ6、φ7与φ8组合的平面模型Fig.5 Plane model for parameter combinations of φ6,φ7 and φ8

图6 腕关节全域性能Fig.6 Global performance of wrist joint

图7 腕关节姿态空间Fig.7 Orientation space of wrist joint
由图6可知:全域性能指标随φ6增大而缓慢增大,在φ6= 90°时取最大值,而之后迅速减小;随φ7增大而急剧增大;随φ8增大呈现出缓慢降低的趋势。由图7可知,姿态空间随φ6增加先增大而后减小,随φ8增大呈现出明显增加的趋势。为进一步明确参数对性能的影响,取3组参数组合分析。当[φ6,φ7,φ8]取值[100°,50°,60°],腕关节全域性能最高时,姿态空间很小,如图8a所示(其中T&T转角表示tile-and-torsion angles)。这表示当φ8取值较小时,降低了腕关节姿态空间的可达范围,使得全域性能相对较高。当[φ6,φ7,φ8]取值[110°,50°,120°],腕关节姿态空间较大,全域性能较差,如图8b所示。这表示当φ6> 90°时,尽管腕关节姿态空间会有明显的增大,但每个位姿点的性能变差,造成全域性能降低。当[φ6,φ7,φ8]取值[90°,50°,120°],腕关节姿态空间满足|φ+ψ| ≤ 30°与θ∈[0°,30°]时,其性能大于0.7,如图8c所示。
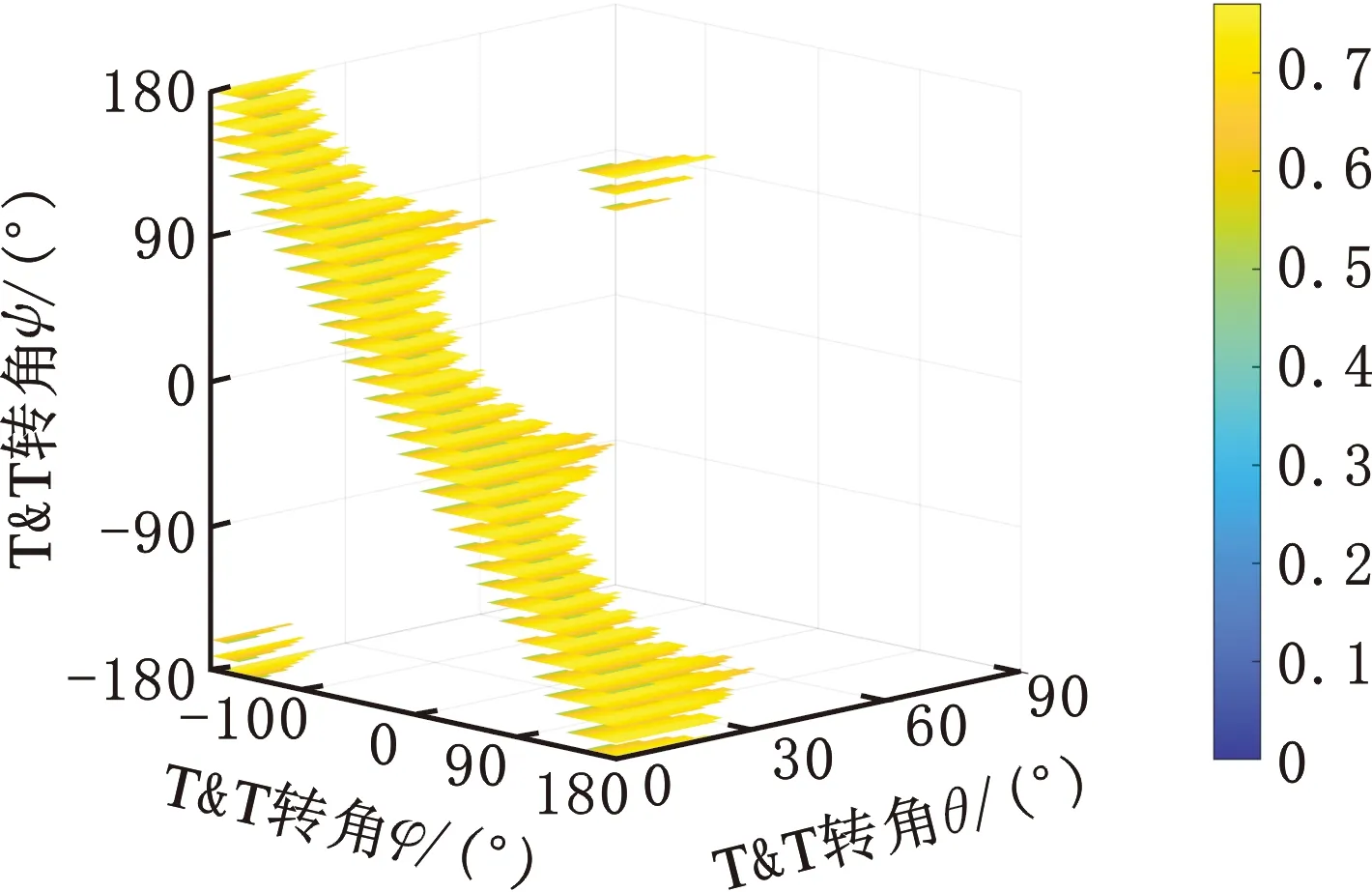
(a)φ6 = 100°,φ7 = 50°,φ8 = 60°
3.4 肘关节优化设计
根据3.2节分析的仿人肩关节优质姿态空间,并考虑仿人肘关节的工作空间区域相对于人体肘关节活动区域的实现程度,设定搜索空间:γ1∈[-150°,30°],θD∈[-90°,30°],θE∈[-120, 0°]。肘关节的结构参数取值范围如表1所示。基于多参数平面模型,建立肘关节全域性能指标,如图9所示。

图9 肘关节全域性能Fig.9 Global performance of elbow joint
由式(22)和图9可知,尽管r2会影响矩阵4Jv的取值,但不会改变矩阵4Jv的条件数。并且,全域性能指标只与r1和r2的比值有关,随r1和r2的比值增加而先增大后减小,在r1∶r2= 1.5时取最大值。搜索空间的转角参数γ1、θD与θE分别取19、9与9个采样点,则共有1539种参数组合,建立平面模型如图10所示。取r1∶r2= 1.5,得到条件数在搜索空间的分布情况,如图11所示。

图10 肘关节性能分布转角γ1、θD与θE组合的平面模型Fig.10 Plane model for angle combinations of γ1,θD and θE
由式(22)和图11可知,当θE=0°时,仿人机械臂的大臂OO2与小臂O2O3共线,末端参考点处于此方向的极限位置,失去了沿该方向的线速度,从而不存在奇异值,导致线速度雅可比矩阵的条件数为0。在θE∈[-120°,0°]搜索空间内,条件数随|θE|的增大而变大。当γ1=θD= -90°时,仿人肩关节的等价关节Y1与转动副D共线,末端参考点失去了沿小臂O2O3方向的线速度,从而不存在奇异值,导致线速度雅可比矩阵的条件数为0。在γ1∈[-150°,30°]与θD∈[-90°,30°]搜索空间内,在γ1=θD= -90°附近的条件数取值较小;在剩余搜索范围内,条件数主要由姿态角γ1决定;γ1= 0°时的条件数取值最大。

图11 肘关节性能分布Fig.11 Performance distribution ofelbow joint
综上分析,选取φ2=120°、φ3=90°、φ6= 90°、φ7= 50°、φ8=120°。参照人体手臂的总长度,选取r1= 290 mm、r2= 193 mm。考虑仿人关节的姿态空间区域相对于人体关节活动区域的实现程度,确定优质姿态空间为β1∈[-110°,40°]、γ1∈[-150,-120°]∩[-60°,30°]、θD∈[-45°,30°]、θE∈[-120°-60°],|φ+,ψ|≤30°、θ∈[0°,30°]。在此基础上,肩关节全域性能指标为0.78;腕关节全域性能指标为0.67;肘关节全域性能指标为0.42,全域条件数为2.38。
4 结论
(1)球面并联机构具有良好的约束性能,各条运动支链的旋量系均为线矢量或纯力偶,基于公共约束力旋量的输入与输出约束能效系数均恒为1。
(2)基于仿人机械臂的运动特性,分别设定了各关节的性能指标。通过分离整体运动性能,规避了分析多关节机构所面临的性能耦合问题,进一步明晰了串并混联机构的构型优势。肩关节作为仿人机械臂的基部,全域性能指标为0.78,提供了良好的传递约束性能;肘关节作为仿人机械臂的主体,全域条件数为2.38,具有较低的误差敏感度,有效地实现了运动传递功能;腕关节作为仿人机械臂的末端,具有恒为1的约束性能,满足末端姿态调整要求。
(3)提出了多参数平面模型,有效地解决了多参数优化的可视化问题。对于肩关节,当β1=-φ2或β1-φ2= 180°时处于奇异位姿;对于肘关节,r1和r2的比值是影响线速度雅可比矩阵条件数的主要因素,并且当θE= 0°或γ1=θD= -90°时末端参考点处于极限位置;对于腕关节,需考虑姿态空间大小对全域性的影响。
