基于深度学习的输电线路均压环倾斜识别
2022-10-18戴永东蒋中军王茂飞陈双辉
戴永东,蒋中军,王茂飞,陈双辉
(1.国网江苏省电力有限公司泰州供电分公司,江苏 泰州 225700;2.南京土星信息科技有限公司,江苏 南京 210000)
0 引言
均压环对于改善输电线路复合绝缘子串承受单位电压有着极为重要的作用。随着均压环在输电线路复合绝缘子串中的广泛应用,其安装与运行位置的重要性日益凸显。均压环长期暴露在野外,受环境、安装等因素影响,极易发生倾斜。若出现倾斜甚至脱落,会影响输电线路运行的稳定性。
国内外许多学者对均压环倾斜缺陷识别作了大量研究,有学者提出可以通过无人机巡检实现均压环的缺失识别[1-3]。目前,图像识别算法主要分为特征检测与深度学习2种。特征检测中,通过角点检测得到目标轮廓的曲率,然后采用分割轮廓片段的方式进行均压环倾斜识别[4-5]。但上述方法不能解决因均压环的局部遮挡或变形而难以识别的问题。深度学习方法通过模型训练,能提高输电线路绝缘子识别成功率。深度学习技术对于目标特征提取、识别效果与鲁棒性均有较大提升[6-8]。但上述方法对于均压环倾斜的定量角度计算方面存在不足。
针对均压环识别准确率低、倾斜角度计算差的问题,本文提出了1种基于深度学习技术的多步骤定量均压环倾斜缺陷检测新方法。本文采用改进的快速区域深度卷积神经网络(faster region based convolutional neural network,Faster-RCNN)进行多目标检测,采用级联金字塔神经网络(cascaded pyramid network,CPN)进行目标特征关键点精细化定位,通过识别绝缘子串的方向信息,定量计算均压环端面和绝缘子串方向夹角。
1 算法原理及方案
在无人机巡检航拍图像中,均压环受到角度影响,难以直接判断其是否发生倾斜。因此,通常情况下需要结合绝缘子串进行综合分析,判断均压环是否倾斜。此时,可以通过判断均压环与绝缘子的夹角是否过大来判断其是否发生倾斜。均压环倾斜角度如图1所示。

图1 均压环倾斜角度Fig.1 Tilt angle of mean-voltage ring
由图1可知,先提取图像中均压环长轴两侧端点坐标,然后提取绝缘子长轴两侧端点坐标,计算两者之间的夹角θ,即可判断均压环是否倾斜[9]。依据安全规范标准,当倾斜角度超过一定阈值(通常为15°)时,均压环会被认定为倾斜。因此,准确计算出均压环倾斜角度成为判断缺陷的最重要依据。
本文的均压环倾斜检测模型主要涉及到3个深度神经网络算法:Faster-RCNN用于均压环与绝缘子串目标检测;CPN用于目标特征关键点定位;文本检测(TextBoxes++,TB)算法用于目标方向定位。下面分别对深度学习算法作简要介绍。
1.1 Faster-RCNN均压环目标检测算法
1.1.1 Faster-RCNN结构
作为目标检测领域的经典算法,Faster- RCNN[10]通过引入区域候选骨干网络(region proposal network,RPN)结构,在提高精度的同时也大幅提升了检测速度。从问世至今,Faster- RCNN一直是目标检测领域的主流算法。目前产生的各种深度神经网络目标检测算法,无不例外地借鉴了Faster-RCNN思想。故本文第一步目标检测也采用并适当优化了该算法参数。Faster-RCNN目标检测算法网络结构如图 2所示。

图2 Faster-RCNN目标检测算法网络结构Fig.2 Faster-RCNN target detection algorithm network structure
输入1张待检图片,首先经过卷积网络得到特征图、RPN提取候选框以及非极大值抑制(non-maximum suppression,NMS)等处理得到精选的候选区域(proposal region network,PRN);然后提取出候选区域对应在特征图上的特征,并采用感兴趣区域池化(region of interest pooling,ROIP) 修订特征图;最后输出目标物体的类别和位置。
在Fast-RCNN基础上,本文提出了1种基于深度学习的输电线路均压环倾斜识别方法。Faster-RCNN的主要优点在于提取候选框区域时采用区域候选网络RPN替换早期Fast-RCNN神经网络的选择性搜索策略,真正实现了端到端训练,在大幅提高检测速度的同时提升了精度。 Faster-RCNN仍存在小目标效果欠佳的缺点。
1.1.2 Faster-RCNN损失函数选择
遵循多任务损失定义及最小化目标函数,Faster-RCNN对1个图像的损失函数定义为[11]:
式中:Pi为预测目标的概率;ti为预测目标的时间;Lcls为锚定框前景;Lreg为锚定框背景;Na为检测数量。
ti={tx,ty,tw,th}是1个向量,表示预测的包围盒的4个参数化坐标。
预测目标的概率取值范围为:
(3)
1.2 CPN特征关键点定位算法
CPN[12-13]通常用于人体姿态估计,可检测人体的关键点。即使对于一些被遮挡的、难以检测的点,该算法也十分有效。本文创新性地提出通过CPN检测均压环与绝缘子串的特征点。算法主要分为GlobalNet和RefineNet 2部分。GlobalNet负责网络所有关键点的检测,重点检测易测值;RefineNet主要对GlobalNet预测的结果进行修正,用于检测难度较高的点。因为GloablNet对那些遮挡或者有复杂背景的关键点预测误差较大,而RefineNet可专门用于修正这些点。
GlobalNet基于Resnet改进而来,将Resnet 最后4个区块分别表示为C2、C3、C4、C5。在这些区块后面通过3×3卷积生成关键点的热力图。像C2和C3这样的浅层特征图具有较高的空间信息(利于定位),但语义信息较低(不利于识别)。另一方面,像C4和C5这样的深层特征具有更多的语义信息,但空间信息较少。通常采用U形编码解码结构来保持空间信息、包含语义信息。GlobalNet改进了U形结构,同样也可以应用于关键点估计。
RefineNet通过上采样和连接不同步骤的特征图来集成不同层次的特征。与沙漏网络的精细化策略不同,RefineNet连接了所有金字塔特征,而不是简单地使用网络末端检测。RefineNet包含了很多瓶颈单元,可以使网络运行更加快速。RefineNet基于训练损失选出难以识别的关键点,并反向传播这些“困难点”的梯度。
CPN结构如图3所示。GlobalNet用于检测图片中所有的均压环关键点。RefineNet用于修正关键点。
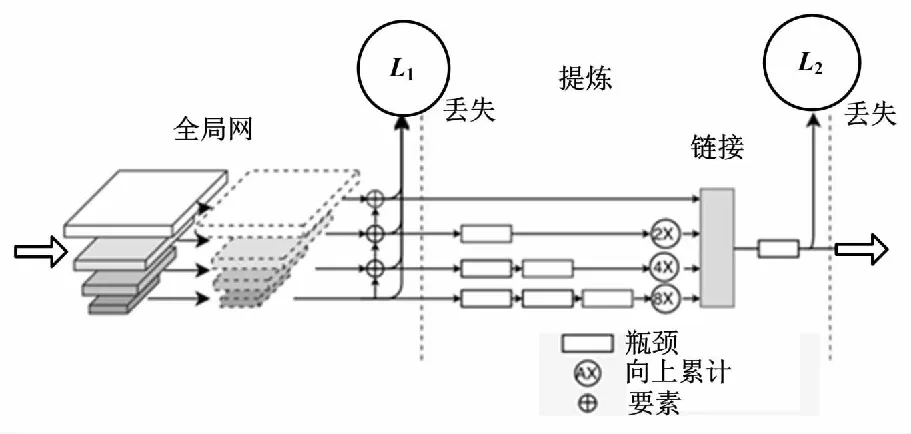
图3 CPN结构Fig.3 CPN structure
1.3 TB绝缘子串方向定位算法
TB算法是一种用于小、杂、旋转文本及物体的多目标旋转检测器[14]。由于本文需要检测出复合绝缘子的方向信息,因此在第一步Faster-RCNN检测出绝缘子串目标的基础上,采用可以输出方向信息的TB算法计算其方向。
TB算法的优点如下。
①使用不规则卷积核。TB中采用3×5的卷积核,以便更好地适应长宽比更大的检测目标。
②使用一种在线的难例挖掘方法(online hard example mining,OHEM)[15]策略。训练过程采用OHEM策略。不同于传统的OHEM,该训练分为两个阶段:第一阶段的正负样本比为1∶3;第二阶段的正负样本比为1∶6。
③多尺度训练。采用了全卷积结构和多尺度训练,因此可以适应不同尺度的输入。
④级联NMS。由于计算倾斜的交并比(intersection over union,IoU)较为耗时,本文采用级联NMS加速IoU计算。首先计算所有框的最小外接矩形的IoU,进行1次阈值为0.5的NMS以消除一部分框;然后在计算倾斜框的IoU的基础上进行1次阈值为0.2的NMS。
2 图像预处理
图像是红绿蓝(red green blue,RGB)数据。数据预处理中,标准的第一步是数据归一化。本文采用的归一化方法包括简单缩放、逐样本均值消减(也称为移除直流分量)、特征标准化(使数据集中所有特征都具有零均值和单位方差)以及图像去雾(暗通道先验法)等。
同时,本文中图像的预处理还涉及对采集到的图片的清洗以及扩增。其中:Faster-RCNN采集无人机航拍图片(复合绝缘子),剔除模糊图片以及绝缘子串与水平面倾斜角度大于30°的图片,对采集后的原始图片采用水平、竖直翻转,调整明暗度、饱和度等方法扩增;CPN用Faster-RCNN检测出的结果从图片中截取出目标小图,采用与上一步相同的数据扩增方法。
3 试验与分析
3.1 算法流程
整个均压环倾斜定量检测流程分为3个部分。第一部分通过Faster-RCNN检测出均压环与绝缘子串的位置定位信息。第二部分裁剪出第一部分结果,通过关键点定位的算法CPN检测出目标的多个端点作为关键点。第三部分基于TB算法计算均压环长轴的连线与绝缘子中轴线的夹角,并将其作为均压环的倾斜角度。以该角度与90°差的绝对值作为倾斜的判断依据。该值越大,表明倾斜越严重。
3.2 试验结果与分析
模型训练中,训练样本集中共有3 533张无人机精细化巡检均压环样本。其中,人工总共标记出4 720个均压环目标,同时标注出均压环与绝缘子串的夹角角度。其中,约28%的目标为倾斜角度大于15°的均压环倾斜缺陷。
模型的训练在服务器(含4块NVIDIA 2 080Ti GPU) 上进行,测试计算机的配置为 CPU Intel Core i7-6 700 K,GPU 为 NVIDIA RTX 5 000,显存为 16 GB。
试验中,另外对500张无人机精细化巡检图片样本进行检测。其中,人工总共标记出661个均压环目标,并标注出均压环与绝缘子串的夹角角度。作为试验结果,本文算法在人工标记的目标中共识别出637个均压环目标。算法定量计算出的均压环倾斜角度定量计算试验结果如表1所示。
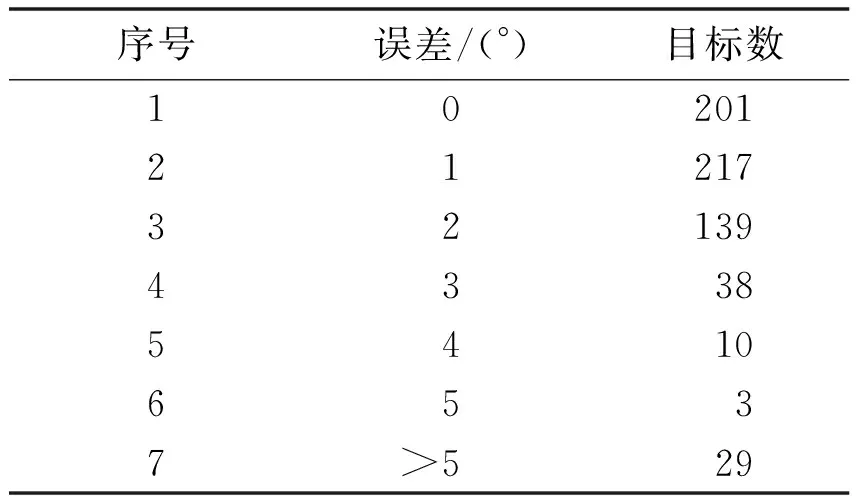
表1 均压环倾斜角度定量计算试验结果Tab.1 Experimental results of quantitative calculation of the mean-voltage ring tilt angles
表1中:目标数表示算法检测的角度与人工标注角度的差值的绝对值,精确到1°。其中,有608个目标(92.0%)的误差不大于5°,识别出来的目标平均误差为0.85°;有557个目标(84.3%)的误差不大于2°,算法计算与判断总体较为准确。
均压环倾斜检测算法的召回率与精确率如表2所示。
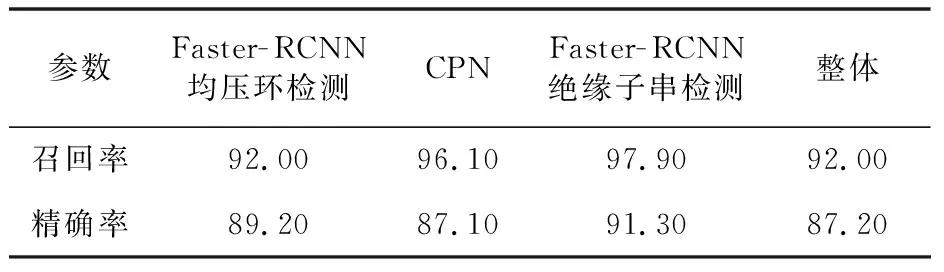
表2 均压环倾斜检测算法的召回率与精确率Tab.2 Recall and precision of the mean-voltage ring tilt detection algorithm /%
表2中:召回率(R)表示样本中的正例有多少被预测正确,包括把原来的正类预测成正类(Tp)以及把原来的正类预测为负类(Fn),计算式如下。
精确率(P)表示预测为正样本中有多少是真正的正样本,包括把正类预测为正类(Tp)以及把负类预测为正类(Fp),计算式如下。
CPN是在Faster-RCNN检测结果的基础上,针对均压环长轴的2个端点衡量的。关键点的横坐标准确度指标为Px、纵坐标准确度指标为Py。当Px<0.02且Py<0.02时,判定该点为正类(Tp)。Px计算式如下。
式中:Pgx表示第i个点的横坐标;Pgy表示预测的第i个点的横坐标;Ppx表示人工标注的第i个点的横坐标。
整体精确率针对所有待检测的目标,以算法计算出角度与人工标注的角度偏差为指标。当角度偏差小于等于5°时判定为Tp,当角度偏差大于5°时则判定为Fp。
分别选择样本数量为500个、1 000个、2 000个、4 000个、6 000个和8 000个,对比CPN与尺度不变特征变换(scale-invariant feature transform,SIFT)。其特征关键点精细化准确性对比如图4所示。
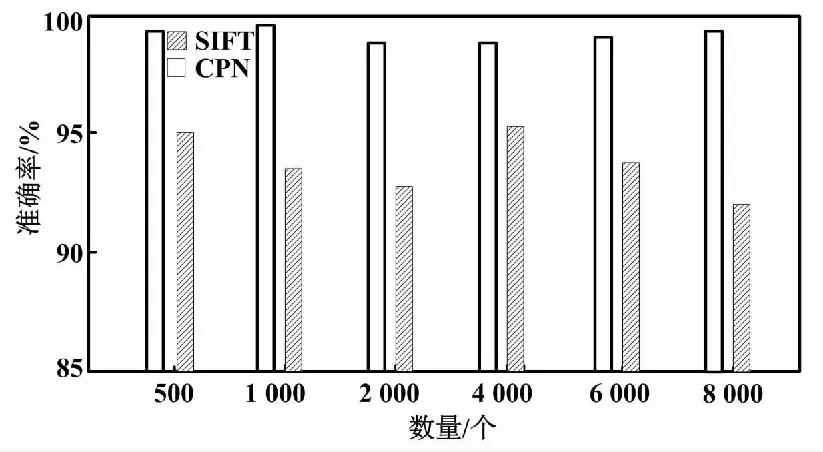
图4 特征关键点精细化准确性对比Fig.4 Conparison of refined accuracy diagram
由图4可知,CPN的关键点精细化准确性高于SIFT。
试验样本集的检测结果表明,算法目标检测与定量角度计算整体达到实用效果。基于深度学习的均压环倾斜定量缺陷检测效果如图5所示。
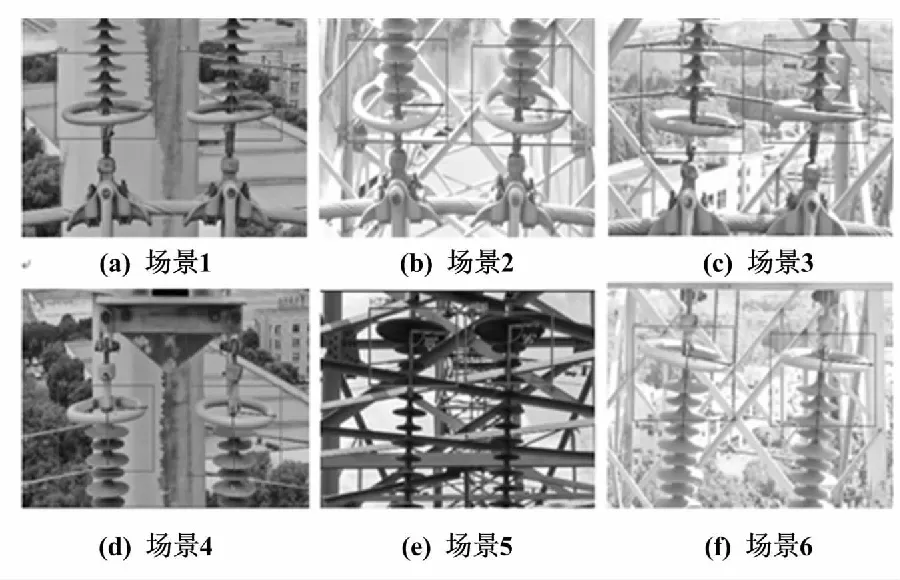
图5 基于深度学习的均压环倾斜定量缺陷检测效果Fig.5 Results of deep-learning based quantitative detection of tilt defects of mean-voltage ring
4 结论
本文提出了1种检测与定量计算均压环目标倾斜角度的新方法。本文主要研究包括:采用优化的Faster-RCNN算法检测均压环与绝缘子串目标;在检测出目标的基础上,采用CPN进一步准确提取目标关键点;通过TB算法计算均压环长轴端点的连线与绝缘子串的中轴线的夹角作为均压环的倾斜角度。
500张测试样本图片检测结果显示,本文算法整体精确度约为87.2%,召回率达92.0%,基本达到了实用的效果;当均压环倾斜角度大于判定阈值时,则提出报警,便于输电线路运维检修。
本文全部采用深度学习算法对均压环倾斜问题进行研究,基本达到实用效果。算法在未来可以从以下3个方面进行提升。①由于拍摄角度问题,当多个均压环紧密相连的时候,会存在一些漏检,也会存在个别误识别情况。对此,要进一步提高目标识别抗干扰能力。②本文采用的关键点定位算法效果也有待提高,可以通过更换其他新的神经网络等方法进行改进[16-17]。③本文检测效果是对于正向水平拍摄的均压环进行检测,后续可以根据需求增加任意方向的检测能力。
