港口船舶自动系泊系统研发与应用综述
2022-10-18高峰唐友刚聂晓彤于滨胡克
高峰,唐友刚,聂晓彤,于滨,胡克,3
(1.天津大学建筑工程学院,天津 300072;2.交通运输部天津水运工程科学研究所,港口水工建筑物技术国家工程实验室,天津 300456;3.燕山大学机械电子工程系,河北 秦皇岛 066044)
当船舶抵达港口后,需要船岸人员密切配合系好缆绳固定船舶,并随潮位、吃水、风浪流动力条件的变化而随时关注和调整各缆绳的松紧,这种传统的系泊作业方式一直没有随着船舶与码头技术的发展而改变[1]。即使缆绳从最初的单一材质已发展到了现在有众多类型的高分子聚合物材料可选,其力学特性也今非昔比,但是船舶在港内系泊作业方式依然保持着最初的人工作业状态[2]。现代航运注重效率,由于装卸作业快速导致船舶吃水频繁变化等情况,系泊船舶必须不断调整缆绳长度,以保证船舶良好的靠泊,这不仅增大了船员的劳动强度,而且增大了事故发生的几率和风险[3]。欧洲港务委员会(European Harbour Masters’Committee)的统计数据表明,95%的人身伤害事件是由绳索和钢丝引起的,其中的60%发生在系泊作业期间。随着船舶大型化、装卸效率提升、频繁的系靠泊作业已成常态,传统系泊方式下的缆力不平衡分配现象也日益明显,从而导致更严格的系泊规定与加强的安全措施,如2018年发布的第四版系泊设备准则(MEG4),引入了针对系泊系统管理计划(MSMP);2020年挪威船级社(DNV GL)推出了包括3个模块的助力安全系泊操作的安全系泊连接应用(Safe Mooring Connect)[4]等。一系列新规定要求意味着对系泊操作和设备进行更严格的管理和跟踪,建立已久的系泊程序与系统设计正面临考验。
在传统的港口中引入自动化系泊设备的研究始于20世纪70年代,但直到80年代中期配备电子控制自动装置的绞车诞生,这意味着应用电子技术的自动装置开始替代传统的机械系统,码头系泊向自动化控制迈出了第一步。随着大数据、自动化和人工智能技术的快速发展,使得无人化智能港口已成为现实,而利用高新技术保证船舶系泊期间的作业安全以代替多年来的传统带缆方式也已成为可能。目前,自动化系泊设施已在国外从研究到成品应用,安装此类系统的港口也在实现自动化、安全性上更加先进与从容。实现智能化自动系泊,其优势在于增加了可靠性和安全性,尽量减少靠泊期间人员的参与操作和消除失误与风险隐患,消除人为错误是显著的好处。同时,港口运转迫切需要提高港口效率,自动化系泊技术也将减少停机等待的时间,不仅系泊时间缩短了,也精简了泊位操作程序,使得中转时间短,进而提升码头作业效率和吞吐量。因此,开展系统的研发具有重要的理论研究意义与实践应用价值。
自动系泊问题涉及船舶、码头与水三者间的相互作用,风、浪、流干扰较大,系统变量较多,实现精细化控制十分困难。随着港口智能化的发展与国外类似技术的行业应用,自动系泊也在国内引起了较大的关注,但相关的研究刚刚起步[5]。港口船舶自动系泊系统研究的科学问题是自主研发系统的结构创新设计、机构荷载计算、流固强耦合多体动力系统的联合建模与仿真以及多系统协同控制策略等。本文将港口船舶自动系泊中的系泊任务和研究难点进行归纳、梳理,探讨主要问题的解决方法,结合研究与发展现状,分析船舶自动系泊系统研究的发展趋势。
1 系泊任务要求
1.1 船舶运动收敛到期望的范围
系泊状态下的船舶运动量是反映系泊状态与衡量码头泊稳条件的重要指标。国际航运协会(PIANC)于1995年对船舶安全作业所允许的船舶运动量范围建立给出了推荐值。英国规范BS 6349-1-21(2013)中,基于PIANC推荐值进行了修订,提出了更加严格的运动量允许值[6]。我国于2009年系统性地开展了以船舶运动量表示的作业标准专题研究,确定了适合于我国实际情况的大型码头船舶运动量作业标准,并列入设计规范[7]。
1.2 船舶与码头荷载安全可控
根据我国港工荷载规范,系缆力的标准值不应大于缆绳的破断力,缆绳破断力应按缆绳材质和规格确定。船舶作用在系船柱、系船环上的系缆力标准值不应小于规范所列出的系缆力标准值。挤靠力应考虑风和水流产生的横向分力总和,撞击力则根据有效撞击能量确定,与船舶质量和法向靠岸速度有关[8]。国际上普遍根据石油公司国际海事论坛(OCIMF)推荐的风荷载、水流力等计算公式计算得到码头前船舶受力,并针对不同材质缆绳规定了所受拉力的上限要求,即系泊船舶在风、浪、流综合作用下,能够保证系缆力不超过缆绳材料自身的破坏强度是船舶安全系泊的重要因素之一[9]。
2 研究难点
自动系泊系统具有较高的技术壁垒,是典型的高技术和高智力密集型产品。目前,国内由于起步晚,智能自动系泊系统的设计原理方法、流固耦合多体动力系统联合建模与仿真、系泊多机器人系统协同控制等相关理论研究较为缺乏,与国外差距比较大。同时,实现自动化甚至智能化的系泊系统是一个充满挑战的复杂问题,此类系统的研发属于跨专业融合的系统工程,需要综合运用传感器技术、信息化技术、自动控制技术、船舶工程技术、机器人技术乃至人工智能技术等,需要同时兼备工业技术知识、计算机系统软件开发的能力以及一定程度的集成化思维。正是由于理论体系尚未完善、技术应用存在可探索性,港口船舶自动系泊系统的研究还存在难点。
3 研究发展现状
3.1 无系泊缆方式的自动系泊系统
无系泊缆方式即使用磁力吸盘代替传统缆绳使船舶达到系泊的目的,省略了系缆和解缆的传统作业。这类船舶磁力系泊装置,能将2~3人手工系缆靠离泊需要30~50 min的时间降低到了只要十几秒钟,而且只需1名操作员就能直接操作完成,在节约人力的同时极大地提高了效率。吸附方式所采用的磁力吸盘,已经广泛应用在冶金、起重、机械加工等行业,技术已经相当成熟,能产生600~1 200 kN/m2的吸力,且磁力线很短,离开吸盘表面很短的间距(约10 cm)就几乎感应不到磁力[10],在保障船舶安全的同时,不会对船舶电子仪器设备等造成影响。以瑞士凯伏特公司(Cavotec)应用在澳大利亚杰拉尔顿港No.7泊位的MoorMasterTM系列下的MM200D型自动系泊产品为例,在泊位长度仅为196 m的条件下可系泊最大船长为225 m的船舶,而不需要任何缆绳。可在几十秒内系泊或释放船舶,安全性和效率明显优于传统缆绳系泊的方式。首个MoorMasterTM系统于1996年投入使用,至今完成系泊操作超过97 500次,并保持100%安全无事故的记录。提升效率的同时还可达到节能减排的目的,MoorMasterTM自从在赫尔辛基港使用至今,每年减少近8 000 t的二氧化碳排放量,节能减排效果显著。目前,MoorMasterTM系统主要产品系列如图1所示。
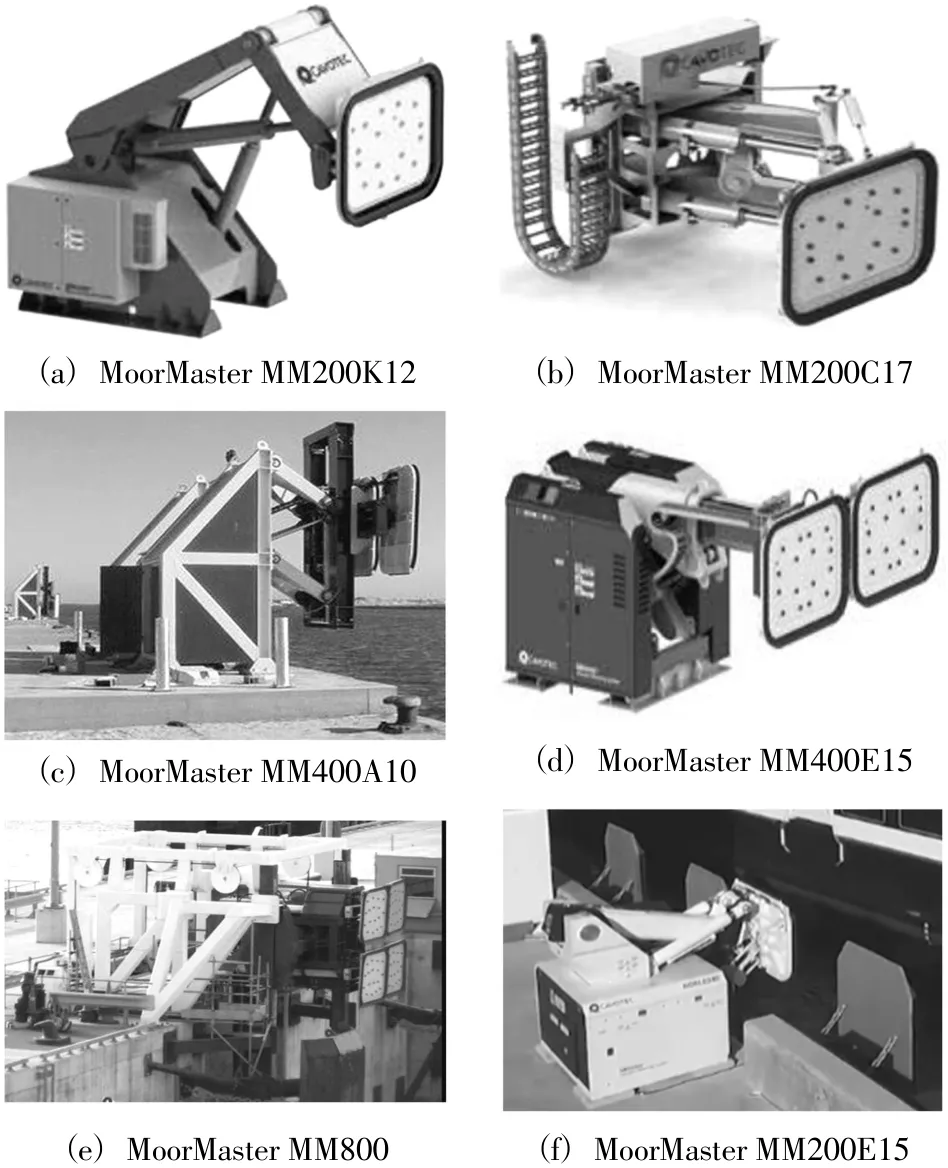
图1 MoorMasterTM系统主要产品系列Fig.1 Main products of MoorMasterTM system
瑞典特瑞堡公司(Trelleborg)在SmartPort概念下开发的AutoMoor系泊系统也是实现智能化系泊作业的一种成功解决方案,如图2所示。该系统已在澳大利亚墨尔本港成功试验,该系统能够将船舶快速、稳固地固定至泊位(可以在1 min内固定船舶,在30 s内脱放船舶),抑制船舶的移动,做到无绳系泊的同时,持续监控影响停泊船舶的所有系泊负载,并提供实时数据,可提升系泊作业的速度和港口内部的安全性,有助于优化码头与港口实现绿色运营。
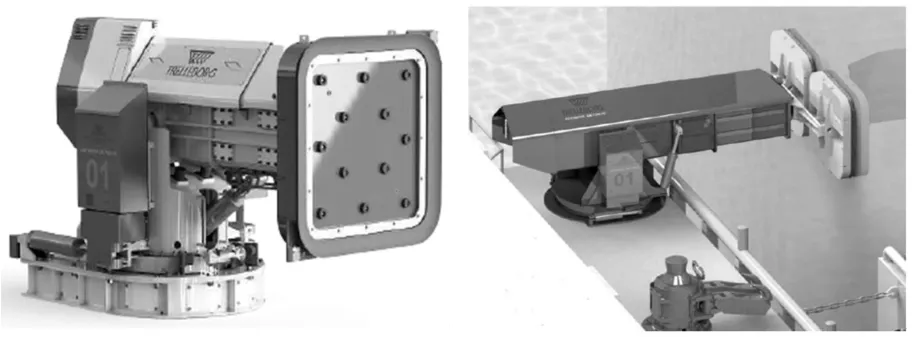
图2 SmartPort概念下开发的AutoMoor系泊系统Fig.2 AutoMoor mooring system developed under SmartPort concept
荷兰Mampaey公司也是靠泊、系泊和拖曳系统设计制造及调试的全球性企业,其代表性产品Dock Locking System(如图3)分为船对船、岸对船2种类型,也是一种基于磁力的自动系泊装置。该装置在船头船尾配置带磁力板的双系缆臂,由液压缸带动,实现船体与系泊装置的连接,可以稳固可靠地连接到任何船体,无论平整或起伏,船漆干净或受过腐蚀。这些磁力板可沿船体水平面自动移动以适应船体移动发生的变化。每个液压缸均配备行程和压力传感器,以便于计算不同条件下的系泊力。
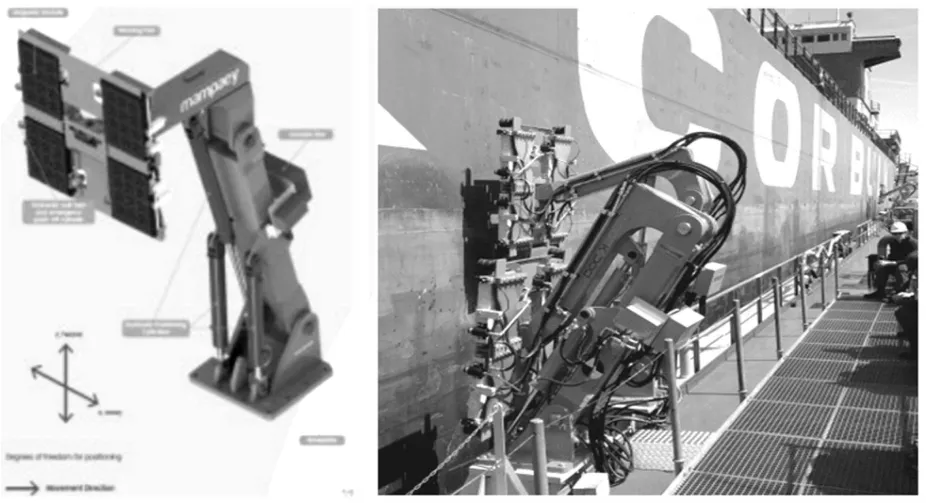
图3 Mampaey公司的Dock-Locking系统Fig.3 Mampaey's Dock-locking System
3.2 有系泊缆方式的自动系泊系统
这类系统立足于现有缆绳系泊方式,通过调节缆力或缆绳性能实现改善船舶系泊条件,如码头两端布设船用双筒电动系泊绞车[11],或是利用缓冲吸能组合缆技术以均衡由风浪流等环境动荷载引起的船舶系缆力[12]。随着自动调节张力的控制技术日趋成熟,研发能够适应复杂海况的恒张力绞车使得船舶系泊控制成为现实,采用恒定范围张力系统进行系泊作业的优点是可以将系泊缆绳张力控制在一个固定范围内,从而确保缆绳绝不发生断裂,通常这个固定范围远小于缆绳的许用张力[13]。
2014年荷兰皇家帝斯曼集团的ShoreTensionR开发一种独立的液压控制系泊系统,其不需要外部供能,通过吸收在风浪中移动的船舶能量并储存起来,在放松系泊缆索时将其存储于内部。当高峰负荷结束时,系统用存储的能量收回缆索,恢复初始状态。该系统不需要任何外部能量,所以能够提供一种有效的、可持续的系泊解决方案。TRELLEBORG公司也研发类似的装置DynaMoor系统,该装置结合了其快速释放挂钩与创新的恒张力系统,以平衡船舶系泊索上的载荷,使系泊更加安全可靠。
麦基嘉公司(MacGregor)的MOOREX自张紧系泊装置,该系统可安装在码头或船上,以最佳的绳索角度和纵向位置,使船舶在复杂的天气和潮汐条件下也能安全地系泊在纵向和横向船舶上。该装置安装在船的一侧,并将相应的系泊系柱设置在船的侧壳中。该系统可增加系泊能力,保持系泊绳的恒定张力,并保持船舶的位置。可以在短时间停靠的港口进行快速系泊作业,减少了船员对船只可能移动的监督。其控制绞车具备自动化和远程控制功能,有电动和液压驱动2种,能够承受从最高运行温度到最低运行温度的最极端环境条件,能够根据船舶和甲板机械的可用空间,为每一种类型船舶提供各种系泊应用。
3.3 自动系泊的仿真研究
目前港口船舶的自动系泊作业系统相对较新,没有太多理论性研究成果可询,相关研究性文献也极少。由于智能系泊系统涉及流固耦合场力与机器人控制的多体动力系统建模复杂,通常采用理论简化、数值仿真或模型试验的方法来获得经验性的结论。Terblanche等[14]利用Delft Quaysim模拟了MoorMasterTM200型自动系泊系统,得出系泊船舶运动显著减少的结论。de Bont J.[15]通过数值解算的方法验证了MoorMasterTM系泊系统对船舶水平运动的抑制效果。柯林华以AutoMoor构型为例,开展了某港自动系泊系统结构设计及有限元计算分析。曹凯平等[16]根据自动系泊系统的受力特点假定力学模型,推导出自动系泊系统的简化受力计算方法。赵铁石[17]、丁实兴[18]等基于双并联欠驱动系泊机器人进行了数值仿真计算与试验验证,通过自动调节系统阻尼研究对码头船舶水平方向3个自由度运动量的影响。
4 展望
港口船舶实现自动化系泊作业将具有更加安全、经济、环保、高效的特点,也更加符合“智慧、绿色、安全”的港口发展理念。纵观我国,水运交通发达,港口设施现代化推进很快,从无人化的全自动集装箱码头的推广与普及看,智能化的自动系靠泊系统开发应用也将快速发展。由于自动系泊系统具有技术复杂度高、价值量高的特点,是推动我国船舶、海洋与港口产业转型升级的重要方向之一,对推动行业的技术进步和转型发展具有重要意义。未来相关研究将逐步向着模型一体化、控制智能化、靠系泊全程化与实现产业化方向发展。
1)模拟仿真技术的提升,由于整个系统涉及船舶、码头和机械机构,研究者往往侧重在不同角度建立数学模型,如船舶运动、机构运动仿真、荷载有限元分析等,但缺少综合船、岸、系泊机构三体耦合的动力系统联合仿真模型。如何将码头岸壁效应、船舶运动响应等因素予以考虑,将是未来完善构建港口船舶自动系泊系统仿真模型的重点。
2)控制智能化,港口船舶系泊作业属于实践性很强的工程任务,利用人工智能算法复制人类系泊操作的经验,是实现自动系泊的研究方向。基于模糊控制算法能够较好地模拟人工系泊时的思维与决策,构成模糊控制的规则库,由于实际作业的影响因素众多,对应的规则将十分复杂,如何概化出实用的模糊规则将是未来开展人工智能训练的关键。
3)靠系泊全程化,船舶在贴近码头的过程中,如果自动化系泊系统还能够辅助船舶靠泊,将极大地提升作业效率。因此结合船舶在泊位外稳定后平行靠拢到一定程度,自动系泊系统能够主动吸附船舶并拉至系泊位置后稳固船舶,实现靠系泊全程化,这将对系统的整体机构行程、荷载能力的设计提出新的要求。
4)实现产业化,建立与完善港口船舶自动系泊系统研究理论体系,结合港工设计规范的船舶与码头相关荷载计算方法的修编以及检测评估指标的建立等,随着研究的深入,上述问题也必将成为自动系泊系统产业化研究的方向。
5 结语
本文针对国内外港口船舶自动系泊系统的研究发展与应用情况,按照有系泊缆和无系泊缆进行了分类梳理与总结,提出了目前研究工作面临的难点现状,并展望船舶自动系泊系统研究的模型一体化、控制智能化、靠系泊全程化与实现产业化方向发展的研究趋势。通过抛砖引玉,相信随着自动系泊理论、仿真模型和样机测试的不断深入,我国自主研发的港口自动系泊系统将得以实现。
